| comments |
|---|
true |
This guide shows how to detect small objects
with the Inference,
Ultralytics or
Transformers packages using
InferenceSlicer.
Small object detection in high-resolution images presents challenges due to the objects' size relative to the image resolution.
=== "Inference" ```python import cv2 import supervision as sv from inference import get_model
model = get_model(model_id="yolov8x-640")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
results = model.infer(image)[0]
detections = sv.Detections.from_inference(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
```
=== "Ultralytics" ```python import cv2 import supervision as sv from ultralytics import YOLO
model = YOLO("yolov8x.pt")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
results = model(image)[0]
detections = sv.Detections.from_ultralytics(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
```
=== "Transformers" ```python import torch import supervision as sv from PIL import Image from transformers import DetrImageProcessor, DetrForSegmentation
processor = DetrImageProcessor.from_pretrained("facebook/detr-resnet-50")
model = DetrForSegmentation.from_pretrained("facebook/detr-resnet-50")
image = Image.open(<SOURCE_IMAGE_PATH>)
inputs = processor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
width, height = image_slice.size
target_size = torch.tensor([[width, height]])
results = processor.post_process_object_detection(
outputs=outputs, target_sizes=target_size)[0]
detections = sv.Detections.from_transformers(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
labels = [
model.config.id2label[class_id]
for class_id
in detections.class_id
]
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections, labels=labels)
```

Modifying the input resolution of images before detection can enhance small object identification at the cost of processing speed and increased memory usage. This method is less effective for ultra-high-resolution images (4K and above).
=== "Inference" ```{ .py hl_lines="5" } import cv2 import supervision as sv from inference import get_model
model = get_model(model_id="yolov8x-1280")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
results = model.infer(image)[0]
detections = sv.Detections.from_inference(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
```
=== "Ultralytics" ```{ .py hl_lines="7" } import cv2 import supervision as sv from ultralytics import YOLO
model = YOLO("yolov8x.pt")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
results = model(image, imgsz=1280)[0]
detections = sv.Detections.from_ultralytics(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
```

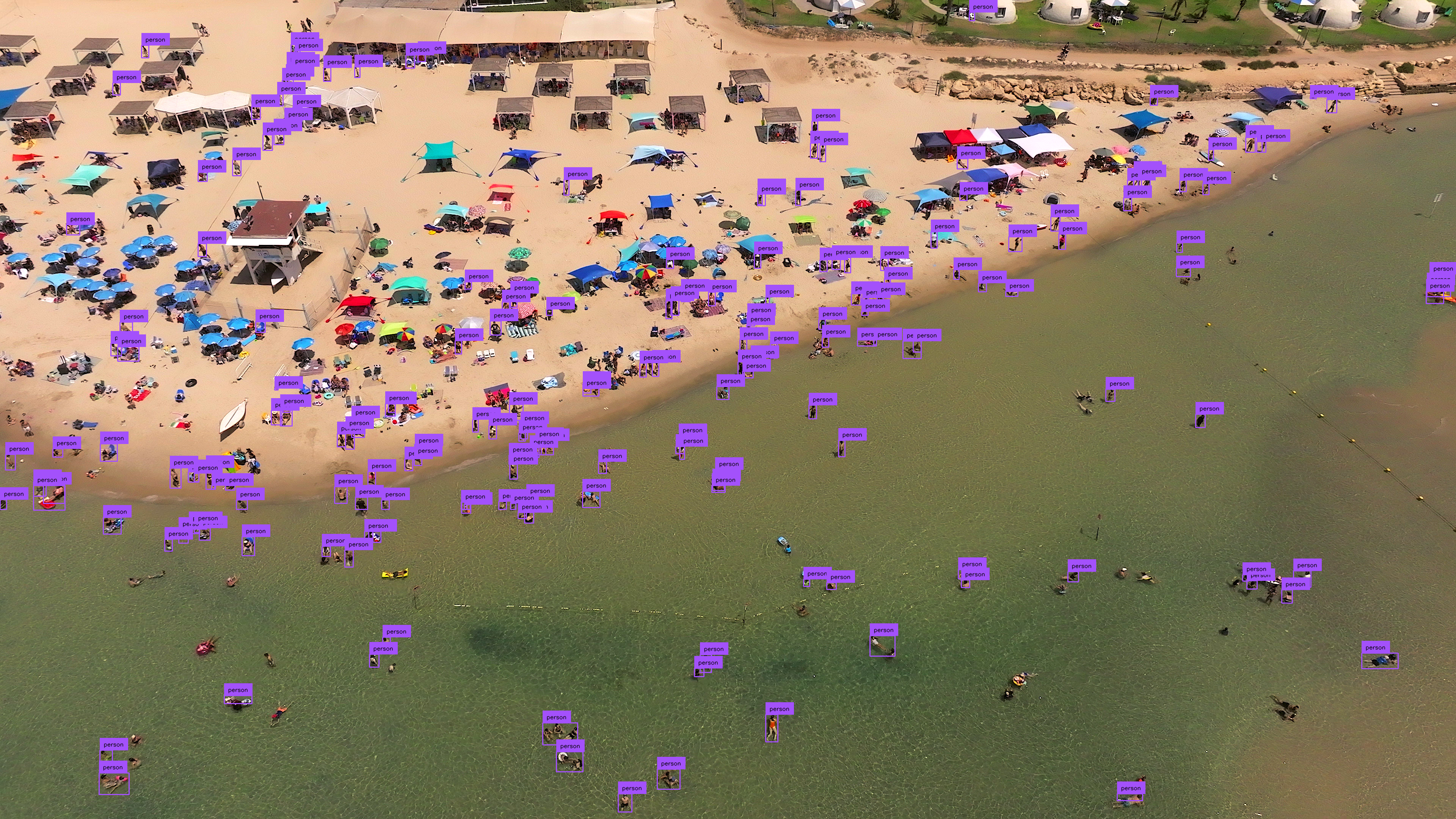
InferenceSlicer
processes high-resolution images by dividing them into smaller segments, detecting
objects within each, and aggregating the results.
=== "Inference" ```{ .py hl_lines="9-14" } import cv2 import numpy as np import supervision as sv from inference import get_model
model = get_model(model_id="yolov8x-640")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
results = model.infer(image_slice)[0]
return sv.Detections.from_inference(results)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
```
=== "Ultralytics" ```{ .py hl_lines="9-14" } import cv2 import numpy as np import supervision as sv from ultralytics import YOLO
model = YOLO("yolov8x.pt")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
result = model(image_slice)[0]
return sv.Detections.from_ultralytics(result)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
```
=== "Transformers" ```{ .py hl_lines="13-28" } import cv2 import torch import numpy as np import supervision as sv from PIL import Image from transformers import DetrImageProcessor, DetrForObjectDetection
processor = DetrImageProcessor.from_pretrained("facebook/detr-resnet-50")
model = DetrForObjectDetection.from_pretrained("facebook/detr-resnet-50")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
image_slice = cv2.cvtColor(image_slice, cv2.COLOR_BGR2RGB)
image_slice = Image.fromarray(image_slice)
inputs = processor(images=image_slice, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
width, height = image_slice.size
target_size = torch.tensor([[width, height]])
results = processor.post_process_object_detection(
outputs=outputs, target_sizes=target_size)[0]
return sv.Detections.from_transformers(results)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
labels = [
model.config.id2label[class_id]
for class_id
in detections.class_id
]
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections, labels=labels)
```
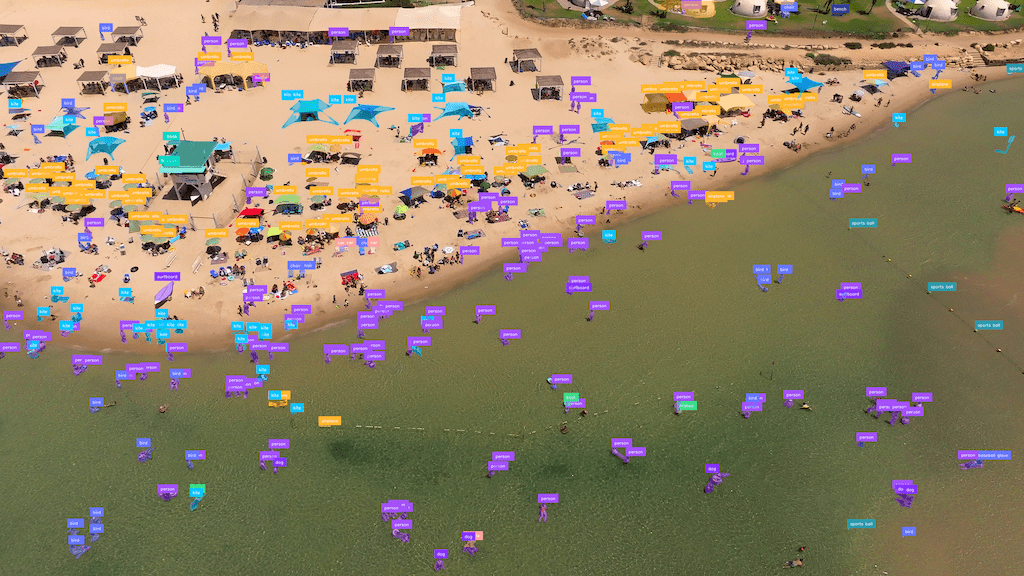
InferenceSlicer can perform segmentation tasks too.
=== "Inference" ```{ .py hl_lines="6 16 19-20" } import cv2 import numpy as np import supervision as sv from inference import get_model
model = get_model(model_id="yolov8x-seg-640")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
results = model.infer(image_slice)[0]
return sv.Detections.from_inference(results)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
mask_annotator = sv.MaskAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = mask_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
```
=== "Ultralytics" ```{ .py hl_lines="6 16 19-20" } import cv2 import numpy as np import supervision as sv from ultralytics import YOLO
model = YOLO("yolov8x-seg.pt")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
result = model(image_slice)[0]
return sv.Detections.from_ultralytics(result)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
mask_annotator = sv.MaskAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = mask_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
```