VTOL will not convert to FW when motors run #15497
Comments
|
Can you share the log (https://logs.px4.io/)? I'm wondering if there's an interaction with the land detector you're seeing. |
|
Hello, Can you view this file from this url? https://review.px4.io/plot_app?log=d5c46412-2c4c-4447-83ba-bb668a674d89 |
|
@bukovec1 I experienced the same issue, but in the opposite direction. Once the motors where off, I could not do the transition. Did you connect your tilt servos through the AUX Channel? I changed PWM_AUX_DISARMED and PWM_AUX_MIN both to 1000 and it worked again. Not sure whats the reason for that. Hopefully it helps you as well |
|
Thanks for your comment. Unfortunately 1.11 does not have PWM_AUX_DISARMED and PWM_AUX_MIN exactly, but I did try to change both PWM_MIN and PWM_DISARM to 1000 and neither solved my issue yet. |
|
Hello @xdwgood @dagar @sfuhrer @notoriou5 I found the issue. It was because the transition airspeed was set to 10 m/s, and since I was inside bench testing, this was not happening. When setting this to 0, I can transition. |
Okay, then I guess we can close this issue? |
|
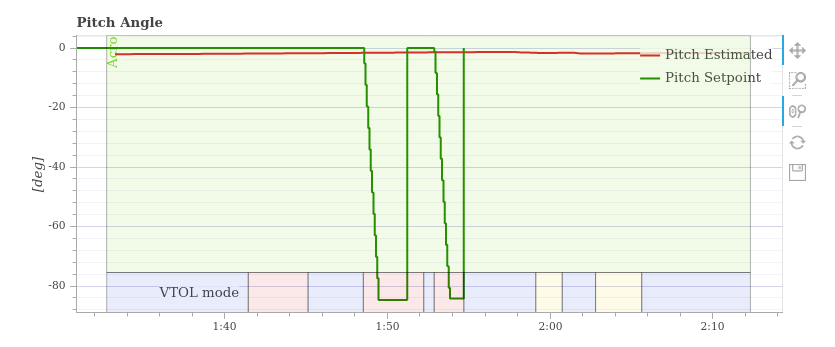
@sfuhrer As this log shows, the flight transmission failed because there was no pitch setting value, not because the conversion airspeed was not reached.#15497 (comment) I hope it will be completely resolved, rather than hidden.I am not against closing it, but we should continue to work here:#15493 |
|
@xdwgood this log file:
is from a standard VTOL, and your issue is with a tailsitter right? So I don't think they're related. |
|
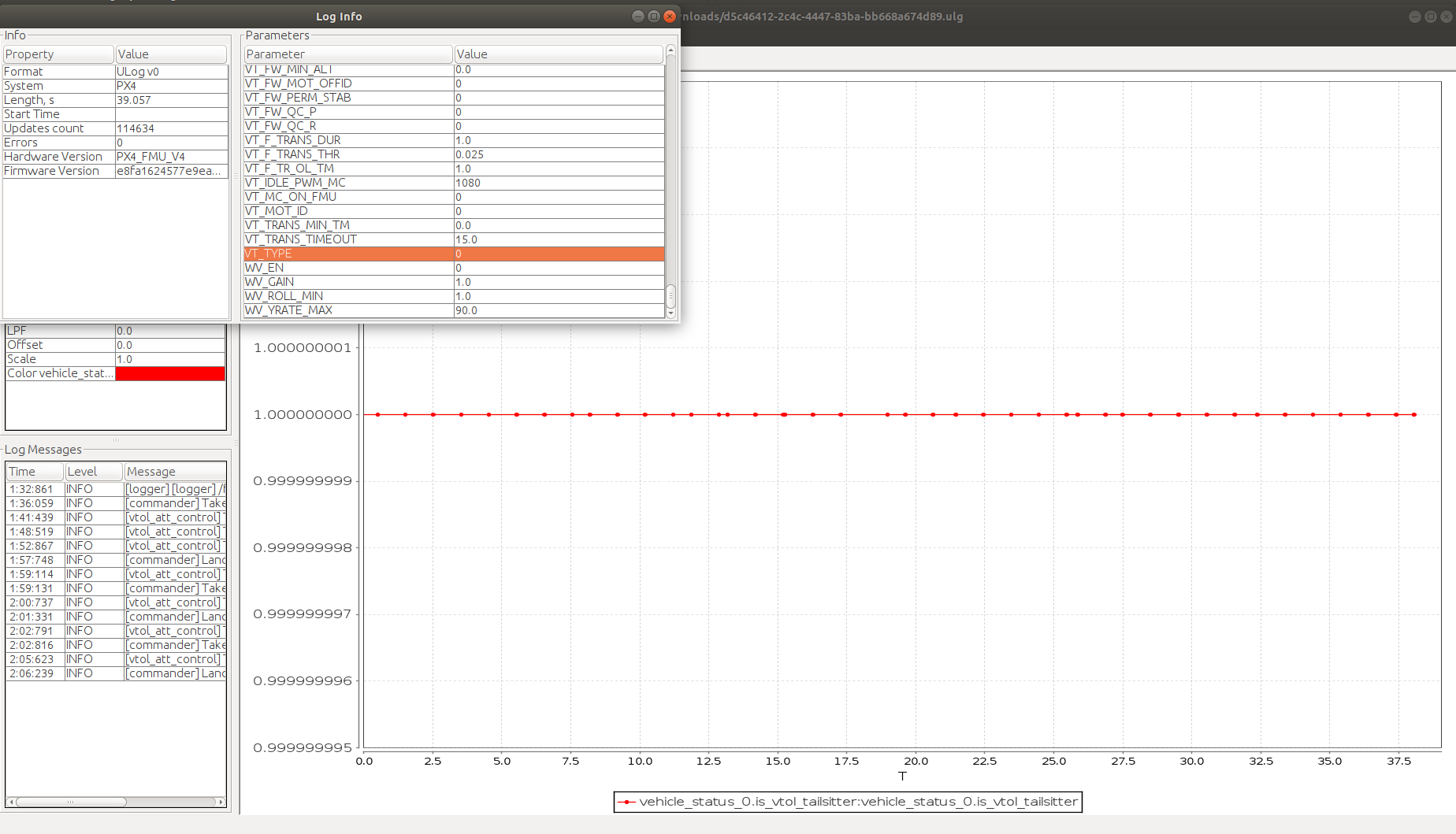
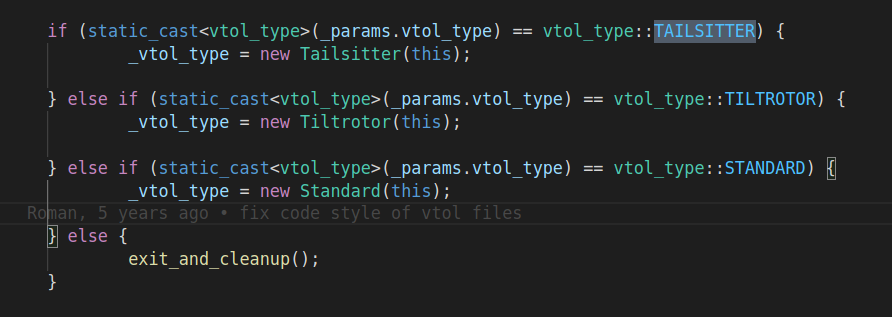
@sfuhrer I remember that
You can check the code again to verify this
vtol_type = 0 means:
|
|
in the tailsitter also, if you blow across the pitot, it transitions to fw. and after the normalization was added ---> i didn't come across any pitch setpoint publishing error. |
|
Closing as the cause for the original issue was found
Please open a new issue if still present on some setups. |
Hello,
All tests were done on the bench.
We manually set a switch on the transmitter that would allow us to "transition" from MC to FW. We could arm the ship and without any motors spinning, I could flip the switch and QGC would show the vehicle would go into FW state.
Unfortunately, when the motors are spinning and I flip the switch to put the vehicle in FW mode, nothing happens. QGC does not show that the ship is in FW, it just stays constant in MC mode.
I am wondering if anyone else has had this issue with 1.11.
The text was updated successfully, but these errors were encountered: