Sampling-based path planning algorithm known as RRT*, which is an asymptotically optimal version of its probabilistically complete counterpart RRT (rapidly exploring random trees).
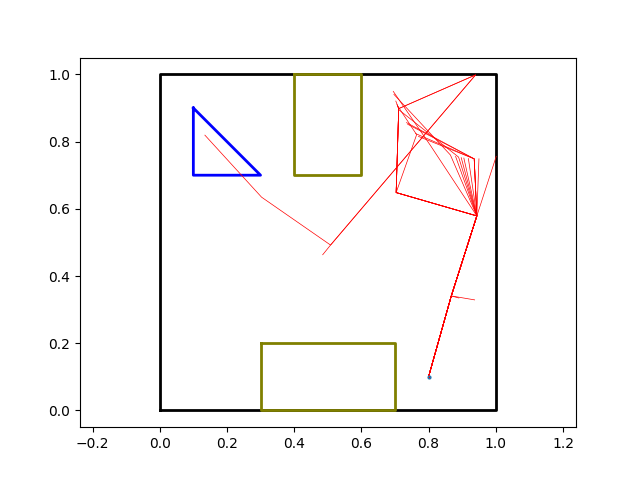
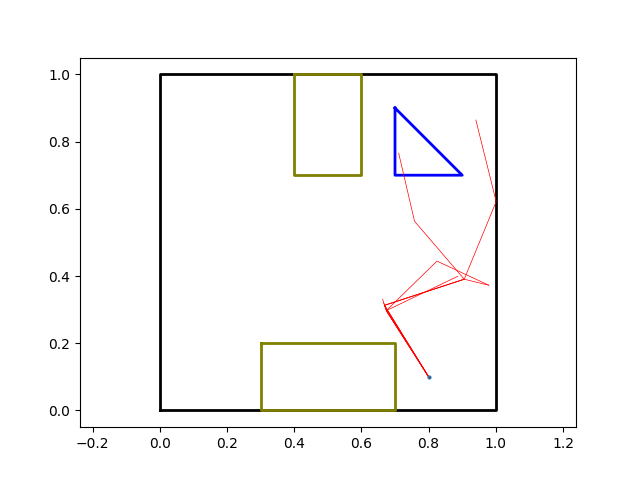
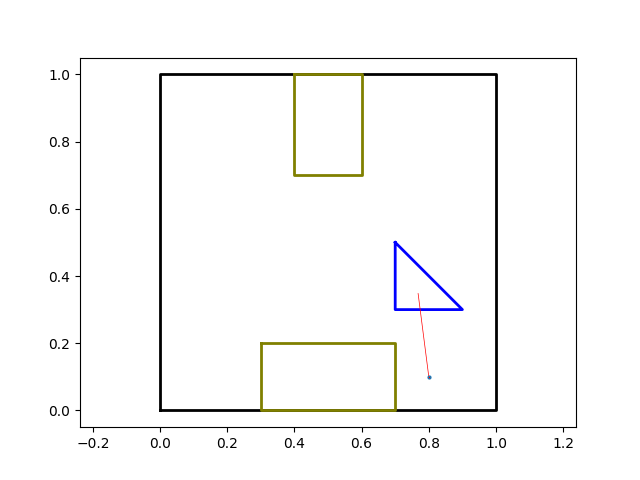
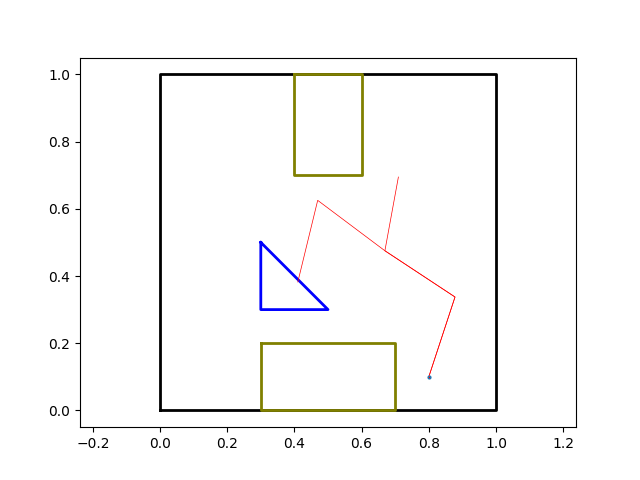
See plots below for sample output with different goal regions, where the initial location is (0.1, 0.9).
- Clone this repository and copy all code.
- Compile using gcc compiler
- Run main.c (output: coordinates of all paths, including one feasible path)
- Run plot.py (output: plot of obstacles, goal region, and all paths)
Karaman, S., & Frazzoli, E. (2011). Sampling-Based Algorithms for Optimal Motion Planning. Robotics.