diff --git a/README.md b/README.md
index 4eee9effd0..4c70a42204 100644
--- a/README.md
+++ b/README.md
@@ -1,2 +1,7 @@
-# tizen-docs-
+#tizen-docs
+
This project is for writing Tizen documents for platform and application developers. The documents will be published https://source.tizen.org or https://developers.tizen.org.
+
+## Notices
+Please copy & paste a line in TOC.html after exporting TOC.md.
+
diff --git a/TOC.html b/TOC.html
new file mode 100755
index 0000000000..4aef2912a4
--- /dev/null
+++ b/TOC.html
@@ -0,0 +1,61 @@
+
+
+
+
+
+TOC.md
+
+
+
diff --git a/TOC.md b/TOC.md
new file mode 100755
index 0000000000..741381f42e
--- /dev/null
+++ b/TOC.md
@@ -0,0 +1,82 @@
+# [Getting Started](getting_started.md)
+
+# What is Tizen?
+
+## [Tizen](tizen/tizen.md)
+
+## [Mobile](tizen/mobile.md)
+
+## [Wearable](tizen/wearable.md)
+
+## [TV](tizen/tv.md)
+
+## [IoT (?)](tizen/iot.md)
+
+
+
+# Open Source Tizen
+
+## About Open Sourece Project (www.tizen.org contents)
+### [Overview](open_source/about/tizen_open_source_overview.md)
+### [Terms of Service](open_source/about/terms_of_service.md)
+### [Brand Guidelines](open_source/about/brand_guidelines.md)
+### [Licenses](open_source/about/licenses.md)
+### [Development Working Mechanism](open_source/about/working_mechanism.md)
+
+## Developing
+### [Setting up Development Environment](open_source/developing/setting_up.md)
+### [Installing Development Tools](open_source/developing/installing.md)
+### [Cloning Tizen Source](open_source/developing/downloading.md)
+### [Building Packages Locally with GBS](open_source/developing/building.md)
+### [Building All Packages Locally with GBS](open_source/developing/building_all.md)
+### [Contributing Code to Tizen](open_source/developing/contributing.md)
+### [Creating Tizen Images with MIC](open_source/developing/creating.md)
+### [Typographic Conventions](open_source/developing/conventions.md)
+### [FAQ](open_source/developing/faq.md)
+
+## Tizen Porting
+### [Introduction](open_sourece/porting/introduction.md)
+### [Kernel](open_sourece/porting/kernel.md)
+### [System](open_sourece/porting/system.md)
+### ...
+
+## Tizen RT
+### [Tizen Overview](open_sourece/tizen_rt/00_tizen_rt_overview.md)
+### [Tizen RT Getting Started](open_sourece/tizen_rt/rt_getting_started.md)
+### [Tizen RT APIs](open_sourece/tizen_rt/rt_api.md)
+### [Tizen RT 1.0 Specification](open_sourece/tizen_rt/rt_specification_1_0.md)
+### [Tizen RT Long-term Goals](open_sourece/tizen_rt/rt_goal.md)
+
+## Release Notes
+
+### [Tizen 4.0 M1](tizen/release/tizen_4_0_m1.md)
+
+### [Tizen 3.0 M2](tizen/release/tizen_3_0_m2.md)
+
+### [Tizen RT 1.0](tizen/release/tizen_rt_1_0.md)
+
+### [Tizen 2.4](tizen/release/tizen_2_4.md)
+
+### [Tizen 2.3.1](tizen/release/tizen_2_3_1.md)
+
+## Compliance
+
+### [Tizen Compliance Program](compliance/compliance_program.md)
+
+### [Compliance Specification](compliance/compliance_spec.md)
+
+### [Tizen Compliance Test](compliance/compliance_test.md)
+
+
+
+# Application Development (TBD)
+
+
+
+# Tizen Next (TBD)
+
+## [Tizen Platform](tizen/tizen_platform.md)
+
+## [Tizen Studio](tizen/tizen_studio.md)
+
+## [Visual Studio Tools for Tizen](tizen/vstools.md)
diff --git a/getting_started.md b/getting_started.md
new file mode 100755
index 0000000000..eae1b1ac55
--- /dev/null
+++ b/getting_started.md
@@ -0,0 +1,48 @@
+# Getting Started
+
+## What is Tizen?
+
+
+
+## How to Use Open Source Tizen
+
+Developers can register for an account at: [https://www.tizen.org/user/register](https://www.tizen.org/user/register)
+
+
+
+Tizen developers use the git and [gbs command-line tools](https://source.tizen.org/documentation/reference/git-build-system) for most of their work.
+Tizen source code is managed by [Gerrit](https://source.tizen.org/documentation/reference/gerrit-usage), a code review system for Git-based projects. Source code cloning, development, and review are under ACL (Access Control Lists). Make sure you get rights to access them.
+
+
+
+## IOT world on Craftroom
+
+What is Tizen IoT?
+
+How to make IoT devices
+
+Go to craftroom
+
+
+
+## Getting Started with Tizen .NET
+
+What is Tizen .NET Application?
+
+Creating Tizen .NET Applications
+
+Downloading Visual Studio Tools for Tizen
+
+
+
+## Getting Started with Tizen Studio
+
+What is Tizen Native Application?
+
+Creating with Tizen Native Application
+
+What is Tizen Web Application?
+
+Creating with Tizen Web Application
+
+Downloading Tizen Studio
\ No newline at end of file
diff --git a/index.html b/index.html
new file mode 100644
index 0000000000..3020f977b1
--- /dev/null
+++ b/index.html
@@ -0,0 +1,19 @@
+
+
+Tizen Source
+
+
+
+
+
+
diff --git a/open_source/about/brand_guidelines.md b/open_source/about/brand_guidelines.md
new file mode 100755
index 0000000000..b6aba77d84
--- /dev/null
+++ b/open_source/about/brand_guidelines.md
@@ -0,0 +1,95 @@
+# Brand Guidelines
+
+Tizen is open source by nature and the identity featured below has been created to capture the freedom that open source allows. It has been designed to be flexible and allows for certain customization.
+
+The Tizen Brand Guidelines provides a comprehensive description of the Tizen brand and its uses. Details in this document include usage, colors, fonts, secondary assets and other details. Use this guide for reference in all usage of the brand across mediums.
+
+The brand assets below are just a sample of assets available. If you need other assets from the Brand Guidelines, please contact [Brian Warner](mailto:brian.warner@linux.com?subject=Tizen%20Brand%20Asset%20Request).
+
+
+
+### Download the Tizen Brand Guidelines
+
+Please review the guidelines before using the assets.
+[DOWNLOAD THE PDF](https://download.tizen.org/misc/Tizen-Brand/01-Guidelines/Tizen-Brand-Guidelines-v2_4.pdf)
+
+
+
+------
+
+
+
+Please note
+
+ that the assets provided below are for branding and labeling purposes and
+
+should not be used
+
+ in creating artwork such as banners or promotionals, which use a different set of assets. Again, if you have questions or require additional Tizen assets please contact Brian Warner as mentioned above.
+
+
+
+### Tizen Logo
+
+#### On Dark
+
+[Download .ai](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Logo/On-Dark/01-RGB/Tizen-Logo-On-Dark-RGB.ai)
+[Download .pdf](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Logo/On-Dark/01-RGB/Tizen-Logo-On-Dark-RGB.pdf)
+[Download .png](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Logo/On-Dark/01-RGB/Tizen-Logo-On-Dark-RGB.png)
+
+[Tizen-Logo-Assets.zip](http://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Logo/Tizen-Logo-Assets.zip)
+
+
+
+#### On Light
+
+[Download .ai](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Logo/On-Light/01-RGB/Tizen-Logo-On-Light-RGB.ai)
+[Download .pdf](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Logo/On-Light/01-RGB/Tizen-Logo-On-Light-RGB.pdf)
+[Download .png](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Logo/On-Light/01-RGB/Tizen-Logo-On-Light-RGB.png)
+
+------
+
+
+
+### Tizen Pinwheel
+
+#### On Dark
+
+[Download .ai](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Pinwheel/On-Dark/01-RGB/Tizen-Pinwheel-On-Dark-RGB.ai)
+[Download .pdf](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Pinwheel/On-Dark/01-RGB/Tizen-Pinwheel-On-Dark-RGB.pdf)
+[Download .png](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Pinwheel/On-Dark/01-RGB/Tizen-Pinwheel-On-Dark-RGB.png)
+
+[Tizen-Pinwheel-Assets.zip](http://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Pinwheel/Tizen-Pinwheel-Assets.zip)
+
+
+
+#### On Light
+
+[Download .ai](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Pinwheel/On-Light/01-RGB/Tizen-Pinwheel-On-Light-RGB.ai)
+[Download .pdf](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Pinwheel/On-Light/01-RGB/Tizen-Pinwheel-On-Light-RGB.pdf)
+[Download .png](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Pinwheel/On-Light/01-RGB/Tizen-Pinwheel-On-Light-RGB.png)
+
+------
+
+
+
+### Tizen Lockup
+
+#### On Dark
+
+[Download .ai](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Lockup/On-Dark/01-RGB/Tizen-Lockup-On-Dark-RGB.ai)
+[Download .pdf](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Lockup/On-Dark/01-RGB/Tizen-Lockup-On-Dark-RGB.pdf)
+[Download .png](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Lockup/On-Dark/01-RGB/Tizen-Lockup-On-Dark-RGB.png)
+
+[Tizen-Lockup-Assets.zip](http://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Lockup/Tizen-Lockup-Assets.zip)
+
+
+
+#### On Light
+
+[Download .pdf](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Lockup/On-Dark/01-RGB/Tizen-Lockup-On-Dark-RGB.pdf)
+[Download .ai](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Lockup/On-Light/01-RGB/Tizen-Lockup-On-Light-RGB.ai)
+[Download .png](https://download.tizen.org/misc/Tizen-Brand/01-Primary-Assets/Lockup/On-Light/01-RGB/Tizen-Lockup-On-Light-RGB.png)
+
+
+
diff --git a/open_source/about/licenses.md b/open_source/about/licenses.md
new file mode 100755
index 0000000000..ec4da0cd5d
--- /dev/null
+++ b/open_source/about/licenses.md
@@ -0,0 +1,5 @@
+# Content License
+
+
+**TODO: Have to update for Tizen**
+
diff --git a/open_source/about/roles.md b/open_source/about/roles.md
new file mode 100755
index 0000000000..9ba9ea9307
--- /dev/null
+++ b/open_source/about/roles.md
@@ -0,0 +1,127 @@
+# Tizen Development Working Mechanism
+
+------
+
+## 1 System Introduction
+
+### 1.1 SCM
+
+The Source Code Management (SCM) system consists of these two parts:
+
+- **Git.** A particularly powerful, flexible, and low-overhead version control system that makes collaborative development efficient and robust. For more information, refer to these resources:
+
+ -[Git Community Book](http://git-scm.com/book)
+
+ -[Git Wiki](https://git.wiki.kernel.org/index.php/Main_Page)
+
+ -[Git Manual Page](https://www.kernel.org/pub/software/scm/git/docs/)
+
+- **Gerrit.** A web-based code review system, facilitating online code reviews for projects using Git version control system. By showing changes in a side-by-side display and supporting inline comments, Gerrit optimizes the code review process, enhancing review quality. Furthermore, by permitting any authorized user to submit changes to the central Git repository, Gerrit simplifies the maintenance of the Git-based projects, enabling a more centralized use of Git.
+
+### 1.2 OBS
+
+The Open Build Service (OBS) is an open and complete distribution development platform that provides the infrastructure for developers to easily create and release open source software for various Linux distributions on different hardware architectures. In addition, the OBS delivers a collaborative environment that enables developer groups to build and submit changes to other projects.
+
+For more information, refer to the following resources:
+
+- [Open Build Service](http://openbuildservice.org/)
+- [Build Service (openSUSE)](http://en.opensuse.org/openSUSE:Build_Service)
+
+## 2 Working Mechanism
+
+A given project in the Git repository has two possible branches: master branch and upstream branch.
+
+**Note:** Master branch is mandatory, whereas upstream branch is optional. For detailed reasons, refer to the respective bullet list item below.
+
+- **Master Branch (Mandatory)**
+
+Git introduces the master branch (also known as development branch) during the initialization of a repository, thus the default branch in a repository is master branch and most developers keep the repository's most robust and dependable line of development on the master branch.
+
+That is, the master branch hosts each project's full source tree (for example, C/C++, .h, makefile, etc.), including upstream source and Tizen local changes. Though master branch can be renamed or even deleted, it's best practice to regard it as mandatory and leave as is.
+
+**Note:** Developers are responsible for maintaining the packaging changelog within the "/packaging" folder of each Git tree.
+
+- **Upstream Branch (Optional)**
+
+When talking about two repositories that have been cloned one from the other, the parent repository is commonly referred to as being "upstream".
+
+This conventional concept applies to the "upstream branch", as well. More specifically, a parent branch is referred to as the "upstream branch" on which developers base their Git projects. Upstream branch becomes optional in the following scenarios:
+
+- The project only involves purely native code from Tizen and has no upstream project to base on.
+- The project does not need to track the latest update of the upstream project.
+
+### 2.1 Package Generation at the Backend
+
+To submit code from a source repository to the OBS, the backend generates the package file in the required format, as shown in the figure below.
+
+
+
+### 2.2 Package Development Workflow
+
+The package development workflow is described in the following procedure and shown in the figure below:
+
+
+
+1. Developers set up the development environment and install the development tools.
+
+2. Developers clone the source code, do required development, and perform local verification through local build.
+
+3. Developers submit patches to the Gerrit for all stakeholders to review.
+
+4. Tizen back-end service and reviewers verify the patches through automated and manual testing, respectively, and then vote -1, 0, or +1 based on the quality of the patches.
+
+ - Automated testing: Tizen back-end service automatically submits patches to the OBS to perform remote build and then posts the test results back to the Gerrit.
+ - Manual testing: Testers verify the patches manually and then publish comments on the Gerrit.
+
+5. Maintainers approve the patches (Code-Review +2) after they pass verifications (Verified +1) and then merge code changes to the Gerrit repository.
+
+6. Maintainers/Developers submit packages to the OBS by using **gbs submit** command.
+
+ **Note:** It's best practice to always have a maintainer role for every Tizen project, and maintainers should submit pakcages to the OBS as soon as all merged packages are ready for submission in order to prevent possible omission.
+
+7. Tizen back-end service activates pre-release and normal release processes at the same time. During the pre-release process, Tizen images that incoporates specific packages are created and submitted to release engineers to review.
+
+8. Release engineers accept or reject submissions based on the quality of the packages. For accepted submissions, the corresponding source code will be merged into the OBS repository, meanwhile, the normal release process takes over and publishes repos together with Tizen images.
+
+### 2.3 Understanding Roles and Responsibilities
+
+#### 2.3.1 Developers
+
+Developers' responsibilities are:
+
+- Write and submit code to the development branch of a Git project.
+- Verify and review (vote "+1" or "-1") code changes for any project on any branch.
+
+#### 2.3.2 Maintainers
+
+Maintainers' responsibilities are:
+
+- Create additional branches, such as upstream, development branch to profile projects.
+- Rebase master branch to upstream branch.
+- Review code, as well as approve (vote "+2") or reject (vote "-2") patches.
+
+Guidelines for maintainers are:
+
+- Despite the granted power, maintainers must not accept their own changes without passing peer review ("+1") or ("+2").
+- The force push right is granted for maintainers to handle code rebase. Maintainers must not abuse the right to hide patch submissions that are supposed to be reviewed.
+
+#### 2.3.3 Reviewers
+
+Reviewers' responsibility is:
+
+- Review code, as well as approve (vote "+2") or reject (vote "-2") patches.
+
+#### 2.3.4 Release Engineers
+
+Release Engineers' responsibilities are:
+
+- Approve submission to OBS.
+- Perform smoke-test of the resulting image and then transfer to the release area for QA engineers to perform further test.
+
+#### 2.3.5 QA Engineers
+
+QA Engineers' responsibility is:
+
+- Perform thorough integration and verification of the image to eliminate regressions and bugs.
+
+[P](https://source.tizen.org/documentation/developer-guide/getting-started-guide/typographic-conventions)
diff --git a/open_source/about/terms_of_service.md b/open_source/about/terms_of_service.md
new file mode 100755
index 0000000000..9189907100
--- /dev/null
+++ b/open_source/about/terms_of_service.md
@@ -0,0 +1,90 @@
+# Terms of Service
+
+By using the Tizen.org website you are agreeing to be bound by the following terms and conditions here.
+
+Here’s the basic idea:
+
+- Don't violate anyone's intellectual property and post anyone else's copyrighted or confidential material you don't have permission to use.
+- Don't post anything vulgar, inflammatory, pornographic, illegal, etc.
+- Don't post spam.
+- Too many metalinks and tags are not accepted. If you try to boost your SEO, that's an abuse of the system.
+- Don't post just to sell something. Sure, talk up your project, but don't mention how to buy it every single time.
+- Don't launch into personal attacks. You're not going to agree with everyone, but name-calling will just cause trouble and will be regarded as flaming behavior.
+- Tone down the foul language. You can say what you need to say without relying on cursing. In fact, your writing will be regarded as that much more creative.
+
+Tizen.org is providing a framework for discussion and user generated information to expand the knowledge base of Linux-related information. Please note that articles, as well as any other user content on the Yocto Project (such as blogs, directory content, forums, comments, etc.), do not reflect the views or endorsements of the Linux Foundation, its staff, or its members. We recognize there may be inaccurate information reflected in this site and that users should understand that something that appears on Tizen.org does not mean the Linux Foundation has vetted or endorsed that content.
+
+Linux Foundation reserves the right to take down anything you post on this site, for these or other reasons. If you don't agree to these terms, don't use this website. Violation of the terms in this document may result in the removal of the content and a warning from the site's administrators. A second violation will result in the removal of your user account.
+
+### Linux Foundation Terms of Use
+
+Sept 9, 2009
+
+Terms and Conditions of Use for the Linux Foundation Web Site
+
+BY ACCESSING, BROWSING OR USING THIS WEB SITE, YOU ACKNOWLEDGE THAT YOU HAVE READ, UNDERSTAND AND AGREE TO BE BOUND BY THESE TERMS AND CONDITIONS.
+
+This Web site is a service made available by the Linux Foundation. All software, documentation, information and/or other materials provided on and through this Web site ("Content") may be used solely under the following terms and conditions ("Terms of Use").
+
+This Web site may contain other proprietary notices and copyright information, the terms of which must be observed and followed. The Content on this Web site may contain technical inaccuracies or typographical errors and may be changed or updated without notice. The Linux Foundation may also make improvements and/or changes to the Content at any time without notice.
+
+The Linux Foundation and its members ("Members") assume no responsibility regarding the accuracy of the Content and use of the Content is at the recipient’s own risk. The Linux Foundation and the Members provide no assurances that any reported problems with any Content will be resolved.
+
+**Intellectual Property Rights**
+
+Except as otherwise provided, Content on this site, including all materials posted by the The Linux Foundation, is licensed under a [Creative Commons Attribution 3.0 License](http://creativecommons.org/licenses/by/3.0/legalcode).
+
+All logos and trademarks contained on this Web site are and remain the property of their respective owners. No licenses or other rights in or to such logos and/or trademarks are granted.
+
+Except as otherwise expressly stated, by providing the Content, neither the Linux Foundation nor the Members grant any licenses to any copyrights, patents or any other intellectual property rights.
+
+**Users Submissions**
+
+Users are solely responsible for all materials, whether publicly posted or privately transmitted, that users upload, post, e-mail, transmit, or otherwise make available on our sites ("User Content"). Neither the Linux Foundation nor any of its Members shall be liable for any claims arising out of User Content. You warrant that you have all rights needed to provide the User Content in accordance with these terms and all applicable laws or regulations.
+
+Some Linux Foundation Workgroups or other projects that may be hosted by the Linux Foundation may have license terms or Contributor Agreements that are specific to the Workgroup or project and may require Users to sign an agreement (such as a Contributor Agreement) assigning and/or licensing rights in submissions made to such Workgroup or project. In all such cases, and to the extent there is a conflict, those license terms or agreements take precedence over these Terms of Use. With respect to any User Content not governed by other Workgroup or project specific terms or agreements, you agree that the following non-exclusive, irrevocable, royalty-free worldwide licenses shall apply:
+
+**Code Submissions.** User Content in the form of source or object code will be governed by the [BSD License](http://opensource.org/licenses/bsd-license.php).
+
+**All Other Submissions.** User Content that is not in the form of source or object code, including but not limited to white papers, dissertations, articles or other literary works, power point presentations, encyclopedias, anthologies, wikis, blogs, diagrams, drawings, sketches, photos or other images, audio content, video content and audiovisual materials, will be governed by the Creative Commons Attribution 3.0.
+
+The Linux Foundation and the Members do not want to receive confidential information from you through this Web site. Please note that any information or material sent to The Linux Foundation or the Members will be deemed NOT to be confidential.
+
+You are prohibited from posting or transmitting to or from this Web site any unlawful, threatening, libelous, defamatory, obscene, scandalous, inflammatory, pornographic, or profane material, or any other material that could give rise to any civil or criminal liability under the law.
+
+**Disclaimers and Limitations of Liability**
+
+The Linux Foundation and the Members make no representations whatsoever about any other Web site that you may access through this Web site. When you access a non-Linux Foundation Web site, even one that may contain the organization’s name or mark, please understand that it is independent from The Linux Foundation, and that the Linux Foundation and the Members have no control over the content on such Web site. In addition, a link to a non-Linux Foundation Web site does not mean that the Linux Foundation or the Members endorse or accept any responsibility for the content, or the use, of such Web site.
+
+It is up to you to take precautions to ensure that whatever you select for your use is free of such items as viruses, worms, Trojan horses and other items of a destructive nature.
+
+IN NO EVENT WILL THE LINUX FOUNDATION AND/OR THE MEMBERS BE LIABLE TO YOU (AN INDIVIDUAL OR ENTITY) OR ANY OTHER INDIVIDUAL OR ENTITY FOR ANY DIRECT, INDIRECT, INCIDENTAL, PUNITIVE, SPECIAL OR CONSEQUENTIAL DAMAGES RELATED TO ANY USE OF THIS WEB SITE, THE CONTENT, OR ON ANY OTHER HYPER LINKED WEB SITE, INCLUDING, WITHOUT LIMITATION, ANY LOST PROFITS, LOST SALES, LOST REVENUE, LOSS OF GOODWILL, BUSINESS INTERRUPTION, LOSS OF PROGRAMS OR OTHER DATA ON YOUR INFORMATION HANDLING SYSTEM OR OTHERWISE, EVEN IF THE LINUX FOUNDATION OR THE MEMBERS ARE EXPRESSLY ADVISED OR AWARE OF THE POSSIBILITY OF SUCH DAMAGES OR LOSSES.
+
+ALL CONTENT IS PROVIDED BY THE LINUX FOUNDATION AND/OR THE MEMBERS ON AN "AS IS" BASIS ONLY. THE LINUX FOUNDATION AND THE MEMBERS PROVIDE NO REPRESENTATIONS, CONDITIONS AND/OR WARRANTIES, EXPRESS OR IMPLIED, INCLUDING, WITHOUT LIMITATION, THE IMPLIED WARRANTIES OF FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY AND NONINFRINGEMENT.
+
+The Linux Foundation and the Members reserve the right to investigate complaints or reported violations of these Terms of Use and to take any action they deem appropriate including, without limitation, reporting any suspected unlawful activity to law enforcement officials, regulators, or other third parties and disclosing any information necessary or appropriate to such persons or entities relating to user profiles, e-mail addresses, usage history, posted materials, IP addresses and traffic information.
+
+The Linux Foundation and the Members reserve the right to seek all remedies available at law and in equity for violations of these Terms of Use, including but not limited to the right to block access from a particular Internet address or account holder to this Web site.
+
+**Privacy**
+
+COPPA prohibits unfair or deceptive acts or practices in connection with the collection, use, or disclosure of personally identifiable information from and about children under 13 on the Internet. The law requires operators to notify parents and obtain their consent before collecting, using, or disclosing children's personal information.
+
+You can learn more about the YoctoProject Privacy Policy on the Web.
+
+**Digital Millennium Copyright Act**
+
+The Linux Foundation respects the intellectual property of others, and we ask users of our Web sites to do the same. In accordance with the Digital Millennium Copyright Act (DMCA) and other applicable law, we have adopted a policy of terminating, in appropriate circumstances and at our sole discretion, subscribers or account holders who are deemed to be repeat infringers. We may also at our sole discretion limit access to our Web site and/or terminate the accounts of any users who infringe any intellectual property rights of others, whether or not there is any repeat infringement.
+
+**Notice and Procedure for Notifying Designated Agent of Claims of Copyright Infringement **
+
+If you believe that any material on this Web site infringes upon any copyright which you own or control, or that any link on this Web site directs users to another Web site that contains material that infringes upon any copyright which you own or control, you may file a notification of such infringement with our Designated Agent as set forth below. Notifications of claimed copyright infringement must be sent to The Linux Foundation Designated Agent for notice of claims of copyright infringement. Our Designated Agent may be reached as follows:
+
+**Designated Agent:** Lisa Smiley-Gillis
+
+**Address of Designated Agent:** 660 York Street, Suite 102
+San Francisco, CA 94110
+
+**Telephone Number of Designated Agent:** 1-415-723-9709
+
+**E-mail Address of Designated Agent:** [copyright@linuxfoundation.org](mailto:copyright@linuxfoundation.org)
\ No newline at end of file
diff --git a/open_source/about/tizen_open_source_overview.md b/open_source/about/tizen_open_source_overview.md
new file mode 100755
index 0000000000..1ce7a58e85
--- /dev/null
+++ b/open_source/about/tizen_open_source_overview.md
@@ -0,0 +1,91 @@
+# Tizen Source Code
+
+------
+(TODO: need to modify this section for Tizen)
+
+Tizen is an open source software stack created for a wide array of devices with different form factors. The primary purposes of Tizen are to create an open software platform available for carriers, OEMs, and developers to make their innovative ideas a reality and to introduce a successful, real-world product that improves the mobile experience for users.
+
+We also wanted to make sure there was no central point of failure, where one industry player could restrict or control the innovations of any other. The result is a full, production-quality consumer product with source code open for customization and porting.
+
+
+
+# Governance Philosophy
+
+------
+
+Tizen is open source by nature and the identity featured below has been created to capture the freedom that open source allows. It has been designed to be flexible and allows for certain customization.
+
+Uncontrolled customization can, of course, lead to incompatible implementations. To prevent this, the Tizen Open Source Project also maintains the [Tizen Compatibility Program](http://source.Tizen.com/compatibility/index.html), which spells out what it means to be "Tizen compatible" and what is required of device builders to achieve that status. Anyone can (and will!) use the Tizen source code for any purpose, and we welcome all legitimate uses. However, in order to take part in the shared ecosystem of applications we are building around Tizen, device builders must participate in the Tizen Compatibility Program.
+
+
+
+# Privacy Policy
+
+## We respect and are committed to protecting your privacy.
+
+We require that you provide some personal information, to allow us to provide the services we do to the users of Tizen.org, and to improve Tizen.org. The type of information we collect, how we use it, and what choices you have, are detailed in this policy.
+
+### Information Collection and Use
+
+We collect the information you provide when you register for an account or complete an information request form.
+
+We use this information to satisfy your requests for further information, to customize our responses and our future communication with you, and to contact you, regarding development and events in the projects or areas of Tizen.org that you have expressed interest in, or in Tizen.org, in general.
+
+We make every effort to allow you to opt-in and opt-out of receiving messages from Tizen.org. However, if you are receiving messages from us and cannot find a way to unsubscribe, please contact us at [info@Tizen.org](mailto:info@Tizen.org).
+
+### Information Sharing
+
+We will not release your personal information to anyone by any method, including selling, renting, or sharing, unless:
+
+- you grant us permission
+- we are required to do so by law
+
+We will not share personal identification information data, either for single individuals or groups, with any parties, including those affiliated with Tizen.org, such as members or sponsors.
+
+### How We Use Cookies
+
+This website uses cookies. A cookie is a small amount of text data, sent from our webserver to your browser, and stored on your device. The cookie is sent back to the webserver each time the browser connects to this site. We use cookies to personalize the site and to streamline your interaction with the site.
+
+It may be possible to configure your browser to refuse cookies, or to ask you to accept each time a cookie is offered. If you choose to not accept cookies, areas of this site may have reduced functionality or performance.
+
+Software on our servers, or third party web statics services, may store your IP address and other information passed on by your browser (such as browser version, operating system, screen size, language, etc). Tizen.org and/or third party services will aggregate this information to provide usage statistics for this website. We use this information to optimize the design, structure, and performance of this site. In particular, we use Google Analytics to provide usage statistics. For more information, read the Google Analytics Privacy Policy.
+
+### Data Security
+
+Tizen.org is committed to the security of your personal information. We train those who work on Tizen.org on this privacy policy. On our site, we use SSL (Secure Sockets Layer) to protect your personal information by encrypting your information when you send it to Tizen.org.
+
+### Public Forum Content
+
+Tizen.org makes communication forums available to its users such as mail lists, blogs, and others. Be aware that any information or messages you share in these forums becomes public information immediately. Exercise caution in determining whether to disclose any of your personal information. Tizen.org is an open source web site, intended to encourage creative thinking and free expression. However, Tizen.org reserves the right to act as necessary to preserve the integrity of the site and its forums, including removing any and all posts deemed vulgar or inappropriate.
+
+### Children's Online Privacy
+
+Regarding children under the age of 13, Tizen.org does not knowingly:
+
+- accept personal information from them
+- allow them to become registered members of our web site
+
+### Updates to this Privacy Policy
+
+We may update this policy. We will contact you if we make any substantial changes in how we use your personal information.
+
+This privacy policy was last updated on September 27, 2011.
+
+### Contact Information
+
+If you have any questions about this privacy policy itself or on how we use personal information on Tizen.org, please contact us at [info@Tizen.org](mailto:info@Tizen.org).
+
+## Before you begin
+
+This is a getting started page for Tizen developers.
+We recommend reading the [Development Workflow](https://source.tizen.org/documentation/work-flow) page first.
+
+## Getting access
+
+Developers can register for an account at: [https://www.tizen.org/user/register](https://www.tizen.org/user/register)
+
+## Development work flow
+
+Tizen developers use the git and [gbs command-line tools](https://source.tizen.org/documentation/reference/git-build-system) for most of their work.
+Tizen source code is managed by [Gerrit](https://source.tizen.org/documentation/reference/gerrit-usage), a code review system for Git-based projects. Source code cloning, development, and review are under ACL (Access Control Lists). Make sure you get rights to access them.
+
diff --git a/open_source/about/working_mechanism.md b/open_source/about/working_mechanism.md
new file mode 100755
index 0000000000..9ba9ea9307
--- /dev/null
+++ b/open_source/about/working_mechanism.md
@@ -0,0 +1,127 @@
+# Tizen Development Working Mechanism
+
+------
+
+## 1 System Introduction
+
+### 1.1 SCM
+
+The Source Code Management (SCM) system consists of these two parts:
+
+- **Git.** A particularly powerful, flexible, and low-overhead version control system that makes collaborative development efficient and robust. For more information, refer to these resources:
+
+ -[Git Community Book](http://git-scm.com/book)
+
+ -[Git Wiki](https://git.wiki.kernel.org/index.php/Main_Page)
+
+ -[Git Manual Page](https://www.kernel.org/pub/software/scm/git/docs/)
+
+- **Gerrit.** A web-based code review system, facilitating online code reviews for projects using Git version control system. By showing changes in a side-by-side display and supporting inline comments, Gerrit optimizes the code review process, enhancing review quality. Furthermore, by permitting any authorized user to submit changes to the central Git repository, Gerrit simplifies the maintenance of the Git-based projects, enabling a more centralized use of Git.
+
+### 1.2 OBS
+
+The Open Build Service (OBS) is an open and complete distribution development platform that provides the infrastructure for developers to easily create and release open source software for various Linux distributions on different hardware architectures. In addition, the OBS delivers a collaborative environment that enables developer groups to build and submit changes to other projects.
+
+For more information, refer to the following resources:
+
+- [Open Build Service](http://openbuildservice.org/)
+- [Build Service (openSUSE)](http://en.opensuse.org/openSUSE:Build_Service)
+
+## 2 Working Mechanism
+
+A given project in the Git repository has two possible branches: master branch and upstream branch.
+
+**Note:** Master branch is mandatory, whereas upstream branch is optional. For detailed reasons, refer to the respective bullet list item below.
+
+- **Master Branch (Mandatory)**
+
+Git introduces the master branch (also known as development branch) during the initialization of a repository, thus the default branch in a repository is master branch and most developers keep the repository's most robust and dependable line of development on the master branch.
+
+That is, the master branch hosts each project's full source tree (for example, C/C++, .h, makefile, etc.), including upstream source and Tizen local changes. Though master branch can be renamed or even deleted, it's best practice to regard it as mandatory and leave as is.
+
+**Note:** Developers are responsible for maintaining the packaging changelog within the "/packaging" folder of each Git tree.
+
+- **Upstream Branch (Optional)**
+
+When talking about two repositories that have been cloned one from the other, the parent repository is commonly referred to as being "upstream".
+
+This conventional concept applies to the "upstream branch", as well. More specifically, a parent branch is referred to as the "upstream branch" on which developers base their Git projects. Upstream branch becomes optional in the following scenarios:
+
+- The project only involves purely native code from Tizen and has no upstream project to base on.
+- The project does not need to track the latest update of the upstream project.
+
+### 2.1 Package Generation at the Backend
+
+To submit code from a source repository to the OBS, the backend generates the package file in the required format, as shown in the figure below.
+
+
+
+### 2.2 Package Development Workflow
+
+The package development workflow is described in the following procedure and shown in the figure below:
+
+
+
+1. Developers set up the development environment and install the development tools.
+
+2. Developers clone the source code, do required development, and perform local verification through local build.
+
+3. Developers submit patches to the Gerrit for all stakeholders to review.
+
+4. Tizen back-end service and reviewers verify the patches through automated and manual testing, respectively, and then vote -1, 0, or +1 based on the quality of the patches.
+
+ - Automated testing: Tizen back-end service automatically submits patches to the OBS to perform remote build and then posts the test results back to the Gerrit.
+ - Manual testing: Testers verify the patches manually and then publish comments on the Gerrit.
+
+5. Maintainers approve the patches (Code-Review +2) after they pass verifications (Verified +1) and then merge code changes to the Gerrit repository.
+
+6. Maintainers/Developers submit packages to the OBS by using **gbs submit** command.
+
+ **Note:** It's best practice to always have a maintainer role for every Tizen project, and maintainers should submit pakcages to the OBS as soon as all merged packages are ready for submission in order to prevent possible omission.
+
+7. Tizen back-end service activates pre-release and normal release processes at the same time. During the pre-release process, Tizen images that incoporates specific packages are created and submitted to release engineers to review.
+
+8. Release engineers accept or reject submissions based on the quality of the packages. For accepted submissions, the corresponding source code will be merged into the OBS repository, meanwhile, the normal release process takes over and publishes repos together with Tizen images.
+
+### 2.3 Understanding Roles and Responsibilities
+
+#### 2.3.1 Developers
+
+Developers' responsibilities are:
+
+- Write and submit code to the development branch of a Git project.
+- Verify and review (vote "+1" or "-1") code changes for any project on any branch.
+
+#### 2.3.2 Maintainers
+
+Maintainers' responsibilities are:
+
+- Create additional branches, such as upstream, development branch to profile projects.
+- Rebase master branch to upstream branch.
+- Review code, as well as approve (vote "+2") or reject (vote "-2") patches.
+
+Guidelines for maintainers are:
+
+- Despite the granted power, maintainers must not accept their own changes without passing peer review ("+1") or ("+2").
+- The force push right is granted for maintainers to handle code rebase. Maintainers must not abuse the right to hide patch submissions that are supposed to be reviewed.
+
+#### 2.3.3 Reviewers
+
+Reviewers' responsibility is:
+
+- Review code, as well as approve (vote "+2") or reject (vote "-2") patches.
+
+#### 2.3.4 Release Engineers
+
+Release Engineers' responsibilities are:
+
+- Approve submission to OBS.
+- Perform smoke-test of the resulting image and then transfer to the release area for QA engineers to perform further test.
+
+#### 2.3.5 QA Engineers
+
+QA Engineers' responsibility is:
+
+- Perform thorough integration and verification of the image to eliminate regressions and bugs.
+
+[P](https://source.tizen.org/documentation/developer-guide/getting-started-guide/typographic-conventions)
diff --git a/open_source/developing/building.md b/open_source/developing/building.md
new file mode 100755
index 0000000000..dd975244e8
--- /dev/null
+++ b/open_source/developing/building.md
@@ -0,0 +1,296 @@
+# Building Packages Locally with GBS
+
+## 1 Introduction
+
+This document provides information about how to perform local build by using Git Build System (GBS), including the following:
+
+- Preparations
+- Building instructions
+- Build concepts and tips
+
+This document assumes that the instructions in the following documents have been read, well understood, and correctly followed:
+
+- [Setting up Development Environment](https://source.tizen.org/documentation/developer-guide/environment-setup)
+- [Installing Development Tools](https://source.tizen.org/documentation/developer-guide/step-step-instructions/installing-development-tools)
+- [Cloning Tizen Source](https://source.tizen.org/documentation/developer-guide/step-step-instructions/cloning-tizen-source)
+
+## 2 Building All Packages
+
+This section describes how to build all packages required for image creation (Local full build).
+
+To perform local full build, perform the following procedure:
+
+**Note**:
+
+- To get a transparent understanding of the local full build commands, refer to [Build Concepts](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs#build-concepts).
+- To speed up the build process when hardware allows, refer to [Speeding up Local Build](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs#speeding-up-local-build).
+
+1. Follow section 2.2 or section 3.2 in [Cloning Tizen Source](https://source.tizen.org/documentation/developer-guide/step-step-instructions/cloning-tizen-source) to clone source of all projects.
+
+ Upon successful source code cloning, a full GBS configuration file named .gbs.conf is copied from the gbs-config project in Tizen [Project List](https://review.tizen.org/gerrit/#/admin/projects) to the top directory of in which **repo sync** command is executed.
+
+2. Switch to the directory that contains all Tizen projects.
+
+ ```
+ $ cd
+ ```
+
+3. Configure the default .gbs.conf.
+
+ (3-1) Add customized remote repo (mandatory).
+
+ Default GBS configuration files for Tizen 3.0 common, IVI, and mobile verticals are shown below:
+
+ - Common
+
+ ```
+ [general]tmpdir=/var/tmp/profile = profile.tizen3.0_commonwork_dir=. [repo.tizen3.0_x86]url=${work_dir}/pre-built/toolchain-x86/ [repo.tizen3.0_arm]url=${work_dir}/pre-built/toolchain-arm/ [profile.tizen3.0_common]repos=repo.tizen3.0_x86,repo.tizen3.0_armbuildconf=${work_dir}/scm/meta/build-config/build.conf # For wayland ia32# buildconf=${work_dir}/scm/meta/build-config/build-ia32-wayland.conf# For emulator32 wayland# buildconf=${work_dir}/scm/meta/build-config/build-emulator32-wayland.conf# For wayland x86_64# buildconf=${work_dir}/scm/meta/build-config/build-x86_64-wayland.conf# For wayland arm32# buildconf=${work_dir}/scm/meta/build-config/build-arm-wayland.conf# For wayland arm64# buildconf=${work_dir}/scm/meta/build-config/build-arm64-wayland.conf
+ ```
+
+ - Mobile
+
+ ```
+ [general]tmpdir=/var/tmp/profile = profile.tizen3.0_mobilework_dir=. [repo.tizen3.0_x86]url=${work_dir}/pre-built/toolchain-x86/ [repo.tizen3.0_arm]url=${work_dir}/pre-built/toolchain-arm/ [profile.tizen3.0_mobile]repos=repo.tizen3.0_x86,repo.tizen3.0_armbuildconf=${work_dir}/scm/meta/build-config/build.conf
+ ```
+
+ - IVI
+
+ ```
+ [general]tmpdir=/var/tmp/profile = profile.tizen3.0_iviwork_dir=. [repo.tizen3.0_x86]url=${work_dir}/pre-built/toolchain-x86/ [profile.tizen3.0_ivi]repos=repo.tizen3.0_x86buildconf=${work_dir}/scm/meta/build-config/build.conf
+ ```
+
+ For more information about remote repo customization, refer to [Available Branches and the Corresponding Remote Repos](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs#available-branches-and-the-corresponding-remote-repos).
+
+ For more information about .gbs.conf, refer to [GBS Configuration File](https://source.tizen.org/documentation/reference/git-build-system/configuration-file).
+
+ (3-2) Specify the build.conf. (optional, only valid for Tizen 3.0 common)
+
+ Choose and uncomment one of the following based on the variants, as appropriate:
+
+ - wayland ia32
+
+ buildconf=${work_dir}/scm/meta/build-config/build-ia32-wayland.conf
+
+ - emulator32 wayland
+
+ buildconf=${work_dir}/scm/meta/build-config/build-emulator32-wayland.conf
+
+ - wayland x86_64
+
+ buildconf=${work_dir}/scm/meta/build-config/build-x86_64-wayland.conf
+
+ - wayland arm32
+
+ buildconf=${work_dir}/scm/meta/build-config/build-arm-wayland.conf
+
+ - wayland arm64
+
+ buildconf=${work_dir}/scm/meta/build-config/build-arm64-wayland.conf
+
+4. Build all packages required for image creation by executing one of the following commands, as appropriate:
+
+ - armv7l
+
+ ```
+ $ accel_pkgs="bash,bzip2-libs,c-ares,cmake,coreutils,diffutils,eglibc,elfutils-libelf,elfutils-libs,elfutils,fdupes,file,findutils,gawk,gmp,gzip,libacl,libattr,libcap,libcurl,libfile,libgcc,liblua,libstdc++,make,mpc,mpfr,ncurses-libs,nodejs,nspr,nss-softokn-freebl,nss,openssl,patch,popt,rpm-build,rpm-libs,rpm,sed,sqlite,tar,xz-libs,zlib,binutils,gcc"$ gbs build -A armv7l --threads=4 --clean-once --exclude=${accel_pkgs},filesystem,aul,libmm-sound,libtool
+ ```
+
+ - i586
+
+ ```
+ $ gbs build -A i586 --threads=4 --clean-once --exclude=gcc,cmake,filesystem,aul,libmm-sound,libtool
+ ```
+
+
+
+5. For detailed information of Tizen branches, refer to [Available Branches and the Corresponding Remote Repos](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs#available-branches-and-the-corresponding-remote-repos).
+
+ - **Note:**:
+
+ "--exclude" is unnecessary for Tizen 3.0.Starting from gbs 0.22, profile section in gbs.conf supports exclude_packages property, which can be used to set the list of packages to be excluded or to break dependency circle, that is, running the command below:`$ accel_pkgs="bash,bzip2-libs,c-ares,cmake,coreutils,diffutils,eglibc,elfutils-libelf,elfutils-libs,elfutils,fdupes,file,findutils,gawk,gmp,gzip,libacl,libattr,libcap,libcurl,libfile,libgcc,liblua,libstdc++,make,mpc,mpfr,ncurses-libs,nodejs,nspr,nss-softokn-freebl,nss,openssl,patch,popt,rpm-build,rpm-libs,rpm,sed,sqlite,tar,xz-libs,zlib,binutils,gcc"$ gbs build -A armv7l --threads=4 --clean-once --exclude=${accel_pkgs},filesystem,aul,libmm-sound,libtool`is equivalent to running the following command:`$ gbs build -A armv7l --threads=4 --clean-once`after adding the content below in gbs.conf:`[profile.tizen]exclude_packages=bash,bzip2-libs,c-ares,cmake,coreutils,diffutils,eglibc,elfutils-libelf,elfutils-libs,elfutils,fdupes,file,findutils,gawk,gmp,gzip,libacl,libattr,libcap,libcurl,libfile,libgcc,liblua,libstdc++,make,mpc,mpfr,ncurses-libs,nodejs,nspr,nss- softokn-freebl,nss,openssl,patch,popt,rpm-build,rpm-libs,rpm,sed,sqlite,tar,xz-libs,zlib,binutils,gcc,filesystem,aul,libmm-sound,libtool`
+
+6. Take follow-up actions if necessary. For detailed information, refer to [Performing Another Build](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs#performing-another-build).
+
+## 3 Building Specific Package
+
+This section describes how to build specific package.
+
+To build package for specific project, perform the following procedure:
+
+1. Follow section 3 in [Cloning Tizen Source](https://source.tizen.org/documentation/developer-guide/step-step-instructions/cloning-tizen-source) to clone source of specific project.
+
+2. Switch to the directory that contains specific project.
+
+ ```
+ cd
+ ```
+
+3. Create GBS configuration file /.gbs.conf.
+
+ An example of GBS configuration file for Tizen 3.0 is shown below:
+
+ ```
+ [general]tmpdir=/var/tmp/profile = profile.common.tizen3.0work_dir=. [repo.tizen3.0]url = https://download.tizen.org/snapshots/tizen/common/latest/repos/arm-wayland/packages/ [profile.common.tizen3.0]repos=repo.tizen3.0
+ ```
+
+ For more information about .gbs.conf, refer to [GBS Configuration File](https://source.tizen.org/documentation/reference/git-build-system/configuration-file).
+
+ For more customization information about remote repo, refer to [Available Branches and the Corresponding Remote Repos](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs#available-branches-and-the-corresponding-remote-repos).
+
+4. Build package for this project.
+
+ ```
+ $ gbs build -A --include-all
+ ```
+
+## 4 Appendix
+
+This section provides supplementary information of local build, including the following:
+
+- Available branches
+- Build concept
+- Build tips
+
+### 4.1 Available Branches and the Corresponding Remote Repos
+
+Available branches and the corresponding branch names and remote repos are as follows:
+
+- **Tizen 3.0**
+
+ - Branch name: tizen
+
+ - Remote repos:
+
+ - Common:
+
+ Two types of remote repos are shown below, choose one of the following, as appropriate:
+
+ - [http://download.tizen.org/snapshots/tizen/common/latest/repos/ia32-wayland/packages/](http://download.tizen.org/snapshots/tizen/common/latest/repos/ia32-wayland/packages/)
+ - [http://download.tizen.org/snapshots/tizen/common/latest/repos/x86_64-wayland/packages/](http://download.tizen.org/snapshots/tizen/common/latest/repos/x86_64-wayland/packages/)
+
+ - Mobile: [http://download.tizen.org/releases/daily/tizen/mobile/latest/](http://download.tizen.org/releases/daily/tizen/mobile/latest/)
+
+ - IVI: [http://download.tizen.org/releases/daily/tizen/ivi/ivi-release/latest/](http://download.tizen.org/releases/daily/tizen/ivi/ivi-release/latest/)
+
+ **Note:** latest in above remote repo url is a symblink in remote server, which is always linked to the latest new directory and may be changed any time, so make sure to use the latest repo with specific date to guarantee the usability. An example is shown below: [http://download.tizen.org/snapshots/tizen/common/latest/repos/arm-waylan...](http://download.tizen.org/snapshots/tizen/common/latest/repos/arm-wayland/packages/)
+
+### 4.2 Concepts of GBS Build
+
+The build concepts that help developers transparently understand the full build commands are as follows:
+
+- **Prebuilt Binary Packages**
+
+ The /pre-built directory contains a group of prebuilt projects that provides base and toolchain binary RPM packages for GBS build.
+
+- **Cycles in Repos**
+
+ Building packages with dependency cycles is not supported by GBS. Known cycles are as follows:
+
+ ```
+ gcc->eglibc->gccgcc->binutils->gettext->gccgettext->gcc->eglibc->gettextcmake->curl->c-ares->cmakefilesystem->setup->filesystemaul->privacy-manager-server->aullibtool->texinfo->libzio->bzip2->libtoollibmm-sound->avsystem->pulseaudio->system-server->libfeedback->libmm-sound
+ ```
+
+Besides toolchain in Tizen packages, there are several cycles that can't be detected by GBS without binary RPM. Therefore, a remote repo needs to be added in .gbs.conf.
+
+To continue the build by breaking the dependency cycles, add "--exclude" option to exclude specific packages when running **gbs build** command, or specify the excluded packages list in profile section of gbs.conf with exclude_packages property.
+
+- **Accelerator Packages**
+
+ Tizen provides cross-compilers and other accelerator packages, as shown below, in /pre-built/toolchain-arm/ for ARM build.
+
+ ```
+ bash,bzip2-libs,c-ares,cmake,coreutils,diffutils,eglibc,elfutils-libelf,elfutils-libs,elfutils,fdupes,file,findutils,gawk,gmp,gzip,libacl,libattr,libcap,libcurl,libfile,libgcc,liblua,libstdc++,make,mpc,mpfr,ncurses-libs,nodejs,nspr,nss-softokn-freebl,nss,openssl,patch,popt,rpm-build,rpm-libs,rpm,sed,sqlite,tar,xz-libs,zlib,binutils,gcc
+ ```
+
+For the first build, these packages need to be excluded, otherwise built out packages will be installed and used, which will make accelerator packages fail to work.
+
+### 4.3 Build Tips
+
+The build tips include the following:
+
+- How to speed up local build
+- How to perform another build
+
+#### 4.3.1 Speeding up Local Build
+
+If the size of the RAM and swap are all larger than 8G, mount GBS BUILD-ROOTS as tmpfs to speed up building:
+
+```
+$ mkdir -p ~/GBS-ROOT/local/BUILD-ROOTS$ sudo mount -t tmpfs -o size=16G tmpfs ~/GBS-ROOT/local/BUILD-ROOTS
+```
+
+#### 4.3.2 Performing Another Build
+
+When the result of the first build is unsatisfactory, perform another build by executing one of the following commands, as appropriate:
+
+- The first scenario meets the following conditions:
+
+ - The URL of the remote repo is the same as in the previous build.
+ - New packages to be built are dependent on previously built packages.
+ - Users want previously built packages to participate in the new build.
+
+ ```
+ $ gbs build -A
+ ```
+
+- The second scenario meets the following conditions:
+
+ - The URL of the remote repo is the same as in the previous build.
+ - New packages to be built are dependent on previously built packages.
+ - Users want previously built packages to participate in the new build.
+
+ ```
+ $ gbs build -A
+ ```
+
+- The third scenario meets the following conditions:
+
+ - The URL of the remote repo is the same as in the previous build.
+ - New packages to be built are dependent on previously built packages.
+ - Users do not want previously built packages to participate in the new build.
+
+ ```
+ $ gbs build -A --clean-repos
+ ```
+
+- The fourth scenario meets the following conditions:
+
+ - The URL of the remote repo is changed.
+ - New packages to be built are not dependent on previously built packages.
+
+ ```
+ $ gbs build -A --clean
+ ```
+
+- The fifth scenario meets the following conditions:
+
+ - The URL of the remote repo is changed.
+ - New packages to be built are dependent on previously built packages.
+ - Users want previously built packages to participate in the new build.
+
+ ```
+ $ gbs build -A --clean
+ ```
+
+- The sixth scenario meets the following conditions:
+
+ - The URL of the remote repo is changed.
+ - New packages to be builtare dependent on previously built packages.
+ - Users do not want previously built packages to participate in the new build.
+
+ ```
+ $ gbs build -A --clean --clean-repos
+ ```
+
+The building directory during runtime is ~/GBS-ROOT/local/BUILD-ROOTS/scratch.`.`, into which the following input related to current build is loaded to construct an independent building environment:
+
+- Source code in ~/tizen
+- Local RPM packages in ~/GBS-ROOT/local/repos//
+- Remote RPM packages in [http://download.tizen.org/releases/](http://download.tizen.org/releases/)/
+
+Upon successful building, GBS moves the generated RPM packages into the output directory, ~/GBS-ROOT/local/repos//, the content of which will automatically participate in a new build, if any, and may have potential impact on the new build, depending on the dependency between the existing packages and new packages to be built.
+
+Based on the above working mechanism of the GBS build, the following rules must be followed to guarantee the quality of new build:
+
+- Add "--clean" once the URL of the remote repo is changed.
+- Add "--clean-repos" if new packages to be built are dependent on the previously built packages that users do not want to involve into the new build.
\ No newline at end of file
diff --git a/open_source/developing/building_all.md b/open_source/developing/building_all.md
new file mode 100755
index 0000000000..e497113a8e
--- /dev/null
+++ b/open_source/developing/building_all.md
@@ -0,0 +1,329 @@
+# Building All Packages Locally with GBS
+
+This topic provides information on how to perform a build for all Tizen packages using Git Build System (GBS).
+
+You must read, understand, and correctly follow the instructions in the following documents before performing the build:
+
+- [Setting up Development Environment](https://source.tizen.org/documentation/developer-guide/environment-setup)
+- [Installing Development Tools](https://source.tizen.org/documentation/developer-guide/step-step-instructions/installing-development-tools)
+- [Building Packages Locally with GBS](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs)
+
+**Note:**
+
+- To get a transparent understanding of the local full build commands, see [GBS Build Concepts](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-all-packages-locally-gbs#concepts-of-gbs-build).
+- To speed up the build process when hardware allows, see [Speeding up a Local Build](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs#speed).
+
+## Cloning All Tizen Projects
+
+You can clone all Tizen projects over SSH or HTTPS.
+
+**Note:** Procedures to clone all projects over SSH and HTTPS are almost identical. The only difference is the git cloning protocol. However, you can only contribute code to Tizen using the SSH method.
+
+### Cloning All Projects over SSH
+
+You can clone the source of all projects over SSH, including the latest source and the snapshot source.
+
+**Note:** Make sure the SSH configuration file is correctly configured according to [Setting up Development Environment](https://source.tizen.org/documentation/developer-guide/environment-setup). Otherwise, the synchronization cannot be performed successfully and the following error message is displayed:
+
+```
+...nc: connection failed, SOCKS error 1ssh_exchange_identification: Connection closed by remote hostnc: connection failed, SOCKS error 1...fatal: Could not read from remote repository. Please make sure you have the correct access rightsand the repository exists.ssh_exchange_identification: Connection closed by remote hostfatal: Could not read from remote repository.
+```
+
+To clone the latest sources of all projects over SSH:
+
+**Note:** Latest source does not mean the latest sources in the Gerrit server, but the reference snapshot sources where images generated by the reference snapshot are guaranteed by passing all test cases.
+
+1. Create a new directory for Tizen and switch to it:
+
+ ```
+ $ mkdir ~/ && cd ~/
+ ```
+
+2. Create a `.repo/` directory that contains all the information - for example, git repositories, commit IDs, and remote URLs - to download all git repositories to construct all Tizen projects.
+ Initialize the repository by executing the following command:
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b -m ${profile}_${repository}.xml
+ ```
+
+ `` is `tizen` for Tizen 4.0 and `tizen_3.0` for Tizen 3.0.
+
+ For example:
+
+ - Tizen 4.0 Unified / standard
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen -m unified_standard.xml
+ ```
+
+ - Tizen 4.0 Unified / emulator
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen -m unified_emulator.xml
+ ```
+
+ - Tizen 3.0 Common / arm-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m common_arm-wayland.xml
+ ```
+
+ - Tizen 3.0 Common / arm64-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m common_arm64-wayland.xml
+ ```
+
+ - Tizen 3.0 Common / emulator32-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m common_emulator32-wayland.xml
+ ```
+
+ - Tizen 3.0 Common / ia32-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m common_ia32-wayland.xml
+ ```
+
+ - Tizen 3.0 Common / x86_64-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m common_x86_64-wayland.xml
+ ```
+
+ - Tizen 3.0 Mobile / arm-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m mobile_arm-wayland.xml
+ ```
+
+ - Tizen 3.0 Mobile / emulator-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m mobile_emulator-wayland.xml
+ ```
+
+ - Tizen 3.0 Mobile / target-TM1
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m mobile_target-TM1.xml
+ ```
+
+ - Tizen 3.0 TV / arm-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m tv_arm-wayland.xml
+ ```
+
+ - Tizen 3.0 TV / emulator32-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m tv_emulator32-wayland.xml
+ ```
+
+ - Tizen 3.0 TV / emulator64-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m tv_emulator64-wayland.xml
+ ```
+
+ - Tizen 3.0 Wearable / emulator-circle
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m wearable_emulator-circle.xml
+ ```
+
+ - Tizen 3.0 Wearable / target-circle
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m wearable_target-circle.xml
+ ```
+
+ - Tizen 3.0 Wearable / emulator32-wayland
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m wearable_emulator32-wayland.xml
+ ```
+
+ - Tizen 3.0 IVI /arm
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m ivi_arm.xml
+ ```
+
+ - Tizen 3.0 IVI / emulator
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen_3.0 -m ivi_emulator.xml
+ ```
+
+3. Clone the specific snapshot source of all projects over SSH (optional).
+
+
+
+ Replace the latest manifest with a snapshot manifest and make proper modifications by executing the following two commands, as appropriate:
+
+
+
+ ```
+ $ wget -O .repo/manifests///projects.xml$ sed -i '3,4d' .repo/manifests///projects.xml
+ ```
+
+ For example:
+
+ - Tizen 4.0 Unified / standard
+
+ ```
+ $ wget http://download.tizen.org/snapshots/tizen/unified/tizen-unified_20170627.1/builddata/manifest/tizen-unified_20170627.1_standard.xml -O .repo/manifests/unified/standard/projects.xml$ sed -i '3,4d' .repo/manifests/unified/standard/projects.xml
+ ```
+
+ - Tizen 3.0 Common / arm64-wayland
+
+ ```
+ $ wget http://download.tizen.org/snapshots/tizen/3.0-common/tizen-3.0-common_20170627.1/builddata/manifest/tizen-3.0-common_20170627.1_arm64-wayland.xml -O .repo/manifests/common/arm64-wayland/projects.xml$ sed -i '3,4d' .repo/manifests/common/arm64-wayland/projects.xml
+ ```
+
+ - Tizen 3.0 Mobile / target-TM1
+
+ ```
+ $ wget http://download.tizen.org/snapshots/tizen/3.0-mobile/tizen-3.0-mobile_20170627.1/builddata/manifest/tizen-3.0-mobile_20170627.1_target-TM1.xml -O .repo/manifests/mobile/target-TM1/projects.xml$ sed -i '3,4d' .repo/manifests/mobile/target-TM1/projects.xml
+ ```
+
+ - Tizen 3.0 TV / arm-wayland
+
+ ```
+ $ wget http://download.tizen.org/snapshots/tizen/3.0-tv/tizen-3.0-tv_20170627.1/builddata/manifest/tizen-3.0-tv_20170627.1_arm-wayland.xml -O .repo/manifests/tv/arm-wayland/projects.xml$ sed -i '3,4d' .repo/manifests/tv/arm-wayland/projects.xml
+ ```
+
+ - Tizen 3.0 Wearable / emulator-circle
+
+ ```
+ $ wget http://download.tizen.org/snapshots/tizen/3.0-wearable/tizen-3.0-wearable_20170627.1/builddata/manifest/tizen-3.0-wearable_20170627.1_emulator-circle.xml -O .repo/manifests/wearable/emulator-circle/projects.xml$ sed -i '3,4d' .repo/manifests/wearable/emulator-circle/projects.xml
+ ```
+
+ - Tizen 3.0 IVI / arm
+
+ ```
+ $ wget http://download.tizen.org/snapshots/tizen/3.0-ivi/tizen-3.0-ivi_20170627.1/builddata/manifest/tizen-3.0-ivi_20170627.1_arm.xml -O .repo/manifests/ivi/arm/projects.xml$ sed -i '3,4d' .repo/manifests/ivi/arm/projects.xml
+ ```
+
+4. Synchronize the files for all the projects based on the information downloaded by the `repo init` command by executing the following command:
+ `$ repo sync`
+
+### Cloning All Projects over HTTPS
+
+You can clone the source of all projects over HTTPS, including the latest source and the snapshot source.
+
+To clone the latest sources of all projects over HTTPS:
+
+1. Create a new directory for Tizen and switch to it:
+
+ ```
+ $ mkdir ~/ && cd ~/
+ ```
+
+2. Create a `.repo/` directory.
+ Initialize the repository by executing the following command:
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b -m unified_${repository}.xml
+ ```
+
+ `` is `tizen` for Tizen 4.0 and `tizen_3.0` for Tizen 3.0.
+
+ **Note:** The `repo init` command using HTTPS is almost identical to that of using SSH. The only difference is the parameter of the `'-u'` option. Replace `'ssh://@review.tizen.org:29418/scm/manifest'` with `'https://git.tizen.org/cgit/scm/manifests'`.
+
+ For example:
+
+ - Tizen 4.0 Unified / standard
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen -m unified_standard.xml
+ ```
+
+ - Tizen 4.0 Unified / emulator
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen -m unified_emulator.xml
+ ```
+
+ - Tizen 3.0 Common / arm64-wayland
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen_3.0 -m common_arm64-wayland.xml
+ ```
+
+ - Tizen 3.0 Mobile / target-TM1
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen_3.0 -m mobile_target-TM1.xml
+ ```
+
+ - Tizen 3.0 TV / arm-wayland
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen_3.0 -m tv_arm-wayland.xml
+ ```
+
+ - Tizen 3.0 Wearable / emulator-circle
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen_3.0 -m wearable_emulator-circle.xml
+ ```
+
+ - Tizen 3.0 IVI /arm
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen_3.0 -m ivi_arm.xml
+ ```
+
+3. Replace the remote 'fetch url' in the `_remote.xml` file by executing the following command:
+ `$ sed -i 's/ssh:\/\/review.tizen.org/https:\/\/git.tizen.org\/cgit/' .repo/manifests/_remote.xml`The command changes the 'fetch url' in the `.repo/manifests/_remote.xml` file as follows:`from fetch="ssh://review.tizen.org/" to fetch="https://git.tizen.org/cgit/"`
+
+4. Clone the specific snapshot source of all projects over HTTPS (optional).
+
+
+
+ Replace the latest manifest with a snapshot manifest and make proper modifications by executing the following two commands, as appropriate:
+
+
+
+ ```
+ $ wget -O .repo/manifests///projects.xml$ sed -i '3,4d' .repo/manifests///projects.xml
+ ```
+
+ **Note:** This procedure is same as that of [SSH](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-all-packages-locally-gbs#clone_ssh_snapshot).
+
+5. Synchronize the files for all the projects based on the information downloaded by the `repo init` command by executing the following command:
+ `$ repo sync`
+
+## Building All Packages
+
+Build all packages by executing the following commands:
+
+```
+$ cd $ gbs build
+```
+
+For example:
+
+```
+$ cd $ gbs build -A i586 --threads=4 --clean-once
+```
+
+**Note:** Since the GBS configuration file (`.gbs.conf`) and build configuration file (`build.conf`) are also included in `scm/manifests`, they are automatically downloaded in the following paths after the `repo sync`:
+
+- `.gbs.conf`: `~//.gbs.conf`
+- `build.conf`: `~//scm/meta/build-config///_build.conf`
+
+## GBS Build Concepts
+
+The following build concepts help you transparently understand the full build commands:
+
+- **Dependency cycles**
+ - In Tizen versions higher than Tizen 2.4, packages with dependency cycles are only included in the Tizen:[]:Base OBS project. And building packages with dependency cycles are not supported by GBS, so it is impossible to build all packages locally with GBS for Tizen:[]:Base. Therefore, a remote repo which contains RPMs built by OBS for Tizen:[]:Base needs to be added in the `.gbs.conf` file.
+ - In Tizen versions lower than Tizen 2.3, there is only one OBS project and packages with dependency cycles are included in it. To continue the build by breaking the dependency cycles for Tizen versions lower than Tizen 2.3, see [Excluding Specific Packages](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs#id3).
+- **Accelerator packages**
+ - Tizen provides cross-compilers and other accelerator packages. For higher than Tizen 3.0 versions, these accelerator packages are included in the Tizen:[]:Base OBS project.
+ - For Tizen versions lower than Tizen 2.3, there is only one OBS project and the accelerator packages are inlucded in it. These packages have names ending with `-x64` and need to be excluded to build locally with GBS. Otherwise, built out packages are installed and used, and it results in making accelerator packages fail to work. To exclude these accelerator packages for Tizen versions lower than Tizen 2.3, see [Excluding Specific Packages](https://source.tizen.org/documentation/developer-guide/getting-started-guide/building-packages-locally-gbs#id3).
\ No newline at end of file
diff --git a/open_source/developing/contributing.md b/open_source/developing/contributing.md
new file mode 100755
index 0000000000..0dc54a6577
--- /dev/null
+++ b/open_source/developing/contributing.md
@@ -0,0 +1,285 @@
+# Contributing Code to Tizen
+
+## 1 Introduction
+
+This document provides information about how to contribute code to Tizen, including the following:
+
+- Cloning over SSH
+- Submit a patch to the Gerrit
+- Review a patch on the Gerrit
+- Submit a package to the build system
+- Review and accept a package on the build server (for release engineer only)
+
+For more information about the whole work process, please refer to [Tizen Development Working Mechanism](https://source.tizen.org/documentation/developer-guide/getting-started-guide/tizen-development-working-mechanism).
+
+## 2 Cloning over SSH
+
+This section describes how to clone Tizen source over SSH, including the following:
+
+- Cloning specific project over SSH
+- Cloning all projects over SSH
+
+### 2.1 Cloning Specific Project over SSH
+
+This section describes how to clone specific project over SSH.
+
+To clone specific project over SSH, perform the following procedure:
+
+1. Confirm the package name by checking it on Tizen [Project List](https://review.tizen.org/gerrit/#/admin/projects/) or by running the following command:
+
+ ```
+ $ ssh review.tizen.org gerrit ls-projects
+ ```
+
+2. Clone the required package by executing the following command:
+
+ ```
+ $ git clone [-b ] ssh://@review.tizen.org:29418/ []
+ ```
+
+ An example is shown below:
+
+ ```
+ $ git clone ssh://@review.tizen.org:29418/pkgs/a/avsystem
+ ```
+
+### 2.2 Cloning All Projects over SSH
+
+This section describes how to clone source of all projects over SSH, including the following:
+
+- Cloning the latest source of all projects over SSH
+
+- Cloning the snapshot source of all projects over SSH
+
+ **Note:** The following two methods can be used to guarantee the synchronization process go on smoothly.
+
+ - **Method 1**
+
+ Make sure the SSH configuration file is correctly configured according to [Setting up Development Environment](https://source.tizen.org/documentation/developer-guide/environment-setup), otherwise, the synchronization can not be performed successfully and the error message is like the following:
+
+ ```
+ ...nc: connection failed, SOCKS error 1ssh_exchange_identification: Connection closed by remote hostnc: connection failed, SOCKS error 1...fatal: Could not read from remote repository. Please make sure you have the correct access rightsand the repository exists.ssh_exchange_identification: Connection closed by remote hostfatal: Could not read from remote repository. ...
+ ```
+
+ - **Method 2**
+
+ For those who have trouble modifying the SSH configuration file, an alternative is to make the following change in /.repo/manifests/_remote.xml:
+
+ Change
+
+ ```
+ fetch="ssh://review.tizen.org/"
+ ```
+
+ to
+
+ ```
+ fetch="ssh://review.tizen.org:29418/"
+ ```
+
+ Between the two methods, we recommend **Method 1**, that is, [Setting up Development Environment](https://source.tizen.org/documentation/developer-guide/environment-setup) must be strictly followed to guarantee usability.
+
+To prepare for cloning, perform the following procedure:
+
+1. Create ~/bin/ subdirectory, include it in PATH, and then switch to it by executing the following commands:
+
+ ```
+ $ mkdir ~/bin/$ PATH=~/bin:$PATH
+ ```
+
+2. Download the repo script by executing the following command:
+
+ ```
+ $ curl http://commondatastorage.googleapis.com/git-repo-downloads/repo > ~/bin/repo
+ ```
+
+ **Note:** To find solutions for the issues encountered during obtaining the repo tool, refer to [Tips and Heads-up](https://source.tizen.org/documentation/developer-guide/getting-started-guide/tips-and-heads-up).
+
+3. Change the attribute of repo to make it executable by executing the command:
+
+ ```
+ $ sudo chmod a+x ~/bin/repo
+ ```
+
+4. Create a new directory for Tizen and then switch to it by executing the following commands:
+
+ ```
+ $ mkdir ~/$ cd ~/
+ ```
+
+#### 2.2.1 Cloning the Latest Source of All Projects over SSH
+
+To clone the latest source of all projects over SSH, perform the following procedure:
+
+Tizen Common
+
+```
+$ wget -O .repo/manifests/common/projects.xml$ sed -i '3,4d' .repo/manifests/common/projects.xml
+```
+
+1. Initialize the repository by executing one of the following commands, as appropriate:
+
+ - Tizen 3.0
+
+ - Common
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen -m common.xml
+ ```
+
+ - Mobile
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen -m mobile.xml
+ ```
+
+ - IVI
+
+ ```
+ $ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen -m ivi.xml
+ ```
+
+2. Replace latest manifest with snapshot manifest and make proper modification by executing one of the following two sets of commands, as appropriate:
+
+ - Tizen Common
+
+ ```
+ $ wget -O .repo/manifests/common/projects.xml$ sed -i '3,4d' .repo/manifests/common/projects.xml
+ ```
+
+ An example for Tizen Common is shown below:
+
+ ```
+ $ wget http://download.tizen.org/snapshots/tizen/common/latest/builddata/manifest/tizen-common_20160922.2_arm-wayland.xml -O .repo/manifests/common/projects.xml$ sed -i '3,4d' .repo/manifests/common/projects.xml
+ ```
+
+3. Synchronize the repository by executing the following command:
+
+ ```
+ $ repo sync
+ ```
+
+## 3 Patch Submission and Review on the Gerrit
+
+This section describes how to perform patch submission and review on the Gerrit.
+
+### 3.1 Submitting a Patch to the Gerrit
+
+This section describes how to submit a patch to the Gerrit.
+
+To submit a patch to the Gerrit, perform the following procedure:
+
+1. Switch to the project directory and perform local development.
+
+2. Stage the revised content by executing the following command:
+
+ ```
+ $ git add ...
+ ```
+
+3. Commit the revised content by executing the following command:
+
+ ```
+ $ git commit
+ ```
+
+4. Push the patch to Gerrit by executing the following command:
+
+ ```
+ $ git push origin HEAD:refs/for/
+ ```
+
+ **Note:** Valid values for are as follows:
+
+ - **tizen**: corresponds to Tizen 3.0 branch
+
+For more information, refer to [Gerrit Documentation](https://review.tizen.org/gerrit/Documentation/index.html).
+
+### 3.2 Reviewing a Patch on the Gerrit
+
+To review a patch in the Gerrit web GUI, publish the comments and vote for the patch, the patch will be merged or discarded depending on the voting results.
+
+More specifically, a patch will be merged on the following conditions:
+
+- The patch got at least one "+2" score and no "-2" score in the Code Review category.
+- The patch got at least one "+1" score and no "-1" score in the Verified category.
+
+**Note:** Voting "+2" requires proper privilege level. In addition, more than two "+1" serves as "+2".
+
+When a patch meets all the criteria above, privileged users are allowed to click the **Submit and Merge** button to merge the patch into the Gerrit repository.
+
+## 4 Package Submission and Review on the Build System
+
+This section describes how to perform package submission by developers, and for release engineers, how to review and accept the changes on the build system side.
+
+### 4.1 Submitting Package(s) to the Build System
+
+This section includes the following:
+
+- Submitting a package
+- Submitting a group of packages
+
+#### 4.1.1 Submitting a Package
+
+To submit a package to the build system, please execute the following command:
+
+```
+$ gbs submit [-c ] -m ""
+```
+
+During the submission, the GBS automatically creates an annotated tag in the format below:
+
+```
+submit/$Tizen_Version/$(%Y%m%d.%H%M%S)
+```
+
+If the code change has already been merged by the Gerrit, a merge request will be created and release engineers will be notifed to review.
+
+Important Note: if the patch has not been merged in Gerrit, the backend services will abort the operations and send email to the patch owner, to notify that the patch needs to be re-submitted after it is merged.
+
+#### 4.1.2 Submitting a Group of Packages to the Build System
+
+For multiple changed packages that have mutual dependencies, the submission must be performed as a group, that is, all of the packages must be submitted with one unified identification. This is known as **group submission**.
+
+This feature is supported by the collaboration of Tizen client development tool (GBS) and Tizen backend services.
+
+For the platform developers, GBS provide the --tag option, to accept one developer specified "TAG" for the 'gbs submit' command. All submissions for multiple packages with the same TAG will be considered as a "group". And the package in the same "group" will be handled in the build system together.
+
+An example is shown below:
+
+Assuming ail, a low level libray, is depended by aul. Developers of ail has changed some APIs, and aul must be updated to adapt to new API changes of ail. Therefore, once all related patches have been merged to ail and aul separately, these two packages must be submitted as a group.
+
+The procedure is as follows:
+
+1. Submit one of the packages in the group to create a tag.
+
+ ```
+ $ cd platform/core/appfw/aul-1/$ gbs submit -m ""
+ ```
+
+2. Obtain the tag name from the output of the command above, and use the same tag as parameter of --tag for other packages in the group.
+
+ ```
+ $ cd platform/core/appfw/ail/$ gbs submit --tag -m ""
+ ```
+
+Actually, developers can also specify the tag by themselves, and use the same tag for all packages in the package group. In this case, the tag must follow the same rule in above section, or with extra postfix, like:
+
+```
+submit/$Tizen_Version/$(%Y%m%d.%H%M%S).N (N stand for a choiced number)
+```
+
+Tizen backend services will take care all submission with the same tag, and build them together.
+
+### 4.3 Reviewing a Package on the Build Server (for release engineer only)
+
+After developers run **gbs submit** command, Tizen back-end service starts the pre-release and nornal release processes at the same time. During the pre-release process, packages and Tizen images with specific package inside are presented to release engineers and Quality Assurance (QA) engineers for review.
+
+QA engineers are responsible for testing packages as isolated objects, as well as verifying Tizen images with specific package inside to offer release engineers comprehensive information to make appropriate decision about whether to accept or reject a package, including the following:
+
+- Whether this package impacts other dependent package build.
+- Whether this package brings in new bugs.
+- Whether this package causes regression issue.
+- Whether this package influences the performance of Tizen image.
+
+After packages are accepted by release engineers, the corresponding images are automatically created by the normal release process and can be obtained on [http://download.tizen.org/releases/daily](http://download.tizen.org/releases/daily).
\ No newline at end of file
diff --git a/open_source/developing/conventions.md b/open_source/developing/conventions.md
new file mode 100755
index 0000000000..45ba8b473f
--- /dev/null
+++ b/open_source/developing/conventions.md
@@ -0,0 +1,35 @@
+# Typographic Conventions
+
+------
+
+Typographic conventions used in this documentation set are as follows:
+
+- [Optional_Argument]
+
+ The square brackets, [], indicate an optional argument.
+
+-
+
+ The angle brackets, <>, indicate a variable. Replace with an actual value.
+
+- x|y|z
+
+ The vertical bar, |, indicates that only one of the options can be selected.
+
+- \
+
+ The backslash, , indicates that the new line followed is a continuance of a long statement.
+
+ For example, the two versions of commands are equivalent.
+
+ With backslash:
+
+ ```
+ $ tar –zxvf \repo.tar.gz
+ ```
+
+ Without backslash:
+
+ ```
+ $ tar –zxvf repo.tar.gz
+ ```
diff --git a/open_source/developing/creating.md b/open_source/developing/creating.md
new file mode 100755
index 0000000000..e723d2ef3d
--- /dev/null
+++ b/open_source/developing/creating.md
@@ -0,0 +1,71 @@
+# Creating Tizen Images with MIC
+
+
+
+## 1 Introduction
+
+This document provides information about how to create a Tizen image. This document assumes that the instructions in the following documents have been read, well understood, and correctly followed:
+
+- [Setting up Development Environment](https://source.tizen.org/documentation/setting-development-environment)
+- [Installing Development Tools](https://source.tizen.org/documentation/installing-development-tools)
+- [Cloning Tizen Source](https://source.tizen.org/documentation/developer-guide/cloning-tizen-source)
+- [Building Packages Locally](https://source.tizen.org/documentation/developer-guide/building-packages-locally)
+
+## 2 Preparing the Kickstart File
+
+Image creation requires a kickstart file that describes how to create an image. To get the kickstart file ready, perform the following procedure:
+
+1. Download the original kickstart file by executing one of the following commands, as appropriate:
+
+ - armv7l
+
+ ```
+ $ wget http://download.tizen.org/snapshots/tizen/mobile//builddata/image-configs/mobile-wayland-armv7l-tm1.ks
+ ```
+
+Examples of downloading original kickstart file from the release with Snapshot_ID "tizen-3.0" are shown below:
+
+```
+# kickstart file for armv7l$ wget http://download.tizen.org/snapshots/tizen/mobile/latest/builddata/images/target-TM1/image-configurations/mobile-wayland-armv7l-tm1.ks
+```
+
+1. Enable local image creation function by updating the original kickstart file and performing appropriate replacement.
+
+ Take the kickstart file from the release with Snapshot_ID "tizen-3.0" as an example, replace the repo section with one of the following, as appropriate:
+
+ - armv7l
+
+ - ```
+ repo --name=Tizen-main --baseurl=http://download.tizen.org/snapshots/tizen/mobile/latest/repos/target-TM1/packages/ --save --ssl_verify=no --priority=99repo --name=Tizen-base --baseurl=http://download.tizen.org/snapshots/tizen/mobile/latest/repos/target-TM1/packages/ --save --ssl_verify=no --priority=99repo --name=local --baseurl=file:///home//GBS-ROOT/local/repos/tizen3.0-tm1/armv7l/ --priority=1repo --name=local-toolchain --baseurl=file:////pre-built/toolchain-arm/ --priority=2
+ ```
+
+ Then replace "" with the actual value and replace "" with the top directory of Tizen source code in which **repo sync** command is executed, respectively.
+
+**Note:**
+
+- By adding the "local-toolchain" repo, the packages excluded during the building process can be found during the image creation.
+- Specifying the priorities of remote repo and local repo as 99 and 1, respectively, guarantees that MIC will use the packages that exist in the local repo with higher priority when the packages exist in the remote and local repo at the same time.
+
+## 3 Creating a Tizen Image
+
+To create a Tizen image, execute the following command:
+
+```
+$ gbs createimage --ks-file=mobile-wayland-armv7l-tm1.ks
+```
+
+If the size of the RAM is larger than 4G, use "--tmpfs" option to speed up the image creation:
+
+```
+$ gbs createimage --ks-file=mobile-wayland-armv7l-tm1.ks --tmpfs
+```
+
+Here's an example of output:
+
+```
+...Info: Running scripts ...kickstart post script startInfo: Checking filesystem /var/tmp/mic/build/imgcreate-Rii2MC/tmp-pVQesQ/platform.imgInfo: Checking filesystem /var/tmp/mic/build/imgcreate-Rii2MC/tmp-pVQesQ/data.imgInfo: Checking filesystem /var/tmp/mic/build/imgcreate-Rii2MC/tmp-pVQesQ/ums.imgInfo: Pack all loop images together to TM1-new-201609030819.tar.gzInfo: The new image can be found here:/home//tizen/mic-output/TM1-201609030819.tar.gz/home//tizen/mic-output/TM1-201609030833.packages/home//tizen/mic-output/TM1-201609030819.xmlInfo: Finished.
+```
+
+TM1-201609030819.tar.gz is the image file, and TM1-201609030833.packages contains packages info integrated in the image, including package name, version and VCS information. Once the Tizen image is created, the final step is to flash the image to target device for verification. Refer to the [Flash an Image to Device](https://source.tizen.org/documentation/reference/flash-device) for details.
+
+
\ No newline at end of file
diff --git a/open_source/developing/downloading.md b/open_source/developing/downloading.md
new file mode 100755
index 0000000000..02da71b94d
--- /dev/null
+++ b/open_source/developing/downloading.md
@@ -0,0 +1,163 @@
+# Downloading Tizen Source
+
+## 1 Introduction
+
+This document provides information about how to clone Tizen source, including the following:
+
+- Cloning over HTTPS
+
+This document assumes that the instructions in the following documents have been read, well understood, and correctly followed:
+
+- [Setting up Development Environment](https://source.tizen.org/documentation/developer-guide/environment-setup)
+- [Installing Development Tools](https://source.tizen.org/documentation/developer-guide/step-step-instructions/installing-development-tools)
+
+
+
+## 2 Cloning over HTTPS
+
+This section describes how to clone Tizen source over HTTPS, including the following:
+
+- Cloning specific project over HTTPS
+- Cloning all projects over HTTPS
+
+### 2.1 Cloning Specific Project over HTTPS
+
+This section describes how to clone specific project over HTTPS.
+
+To clone specific project over HTTPS, perform the following procedure:
+
+1. Clone the required package by executing the following command:
+
+ ```
+ $ git clone [-b ] https://git.tizen.org/cgit/ []
+ ```
+
+ An example is shown below:
+
+ ```
+ $ git clone https://git.tizen.org/cgit/platform/core/multimedia/avsystem
+ ```
+
+### 2.2 Cloning All projects over HTTPS
+
+This section describes how to clone source of all projects over HTTPS, including the following:
+
+- Cloning the latest source of all projects over HTTPS
+
+- Cloning the snapshot source of all projects over HTTPS
+
+
+
+To prepare for cloning, perform the following procedure:
+
+1. Create ~/bin/ subdirectory, include it in PATH, and then switch to it by executing the following commands:
+
+ ```
+ $ mkdir ~/bin/$ PATH=~/bin:$PATH
+ ```
+
+2. Download the repo script by executing the following command:
+
+ ```
+ $ curl http://commondatastorage.googleapis.com/git-repo-downloads/repo > ~/bin/repo
+ ```
+
+3. Change the attribute of repo to make it executable by executing the command:
+
+ ```
+ $ sudo chmod a+x ~/bin/repo
+ ```
+
+4. Create a new directory for Tizen and then switch to it by executing the following commands:
+
+ ```
+ $ mkdir ~/$ cd ~/
+ ```
+
+#### 2.2.1 Cloning the Latest Source of All Projects over HTTPS
+
+To clone the latest source of all projects over HTTPS, perform the following procedure:
+
+1. Initialize the repository by executing one of the following commands, as appropriate:
+
+ - Tizen 3.0
+
+ - Common
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen -m common.xml
+ ```
+
+ - Mobile
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen -m mobile.xml
+ ```
+
+ - IVI
+
+ ```
+ $ repo init -u https://git.tizen.org/cgit/scm/manifest -b tizen -m ivi.xml
+ ```
+
+2. Replace latest manifest with snapshot manifest and make proper modification by executing one of the following two sets of commands, as appropriate:
+
+ - Tizen Common
+
+ files are available at the [snapshot manifest](http://download.tizen.org/snapshots/tizen/common/latest/builddata/manifest/) webpage.
+
+ ```
+ $ curl > .repo/manifests/common/projects.xml
+ ```
+
+ The below example is how to download tizen-common_20170110.2_arm-wayland.xml.
+
+ ```
+ $curl http://download.tizen.org/snapshots/tizen/common/latest/builddata/manifest/tizen-common_20170110.2_arm-wayland.xml > .repo/manifests/common/projects.xml
+ ```
+
+ - The below example is to change a project path correctly from 'framework/base/tizen-locale' to 'core/base/tizen-locale' after checking a correct path of 'tizen-locale' package at [https://review.tizen.org/gerrit/#/admin/projects/](https://review.tizen.org/gerrit/#/admin/projects/).
+
+ ```
+ $ sed -i -e 's/framework\/base\/tizen-locale/core\/base\/tizen-locale/g' .repo/manifests/common/projects.xml
+ ```
+
+3. Synchronize the repository by executing the following command:
+
+
+
+ ```
+ $ repo sync
+ ```
+
+
+## Tips and Heads-up
+
+### Regarding SSH Configuration File
+
+- When working at home, you don't need any proxy, so the SSH configuration files for all Linux distribution versions can be unified as follows:
+
+ ```
+ Host tizen review.tizen.orgHostname review.tizen.orgIdentityFile ~/.ssh/id_rsaUser Port 29418
+ ```
+
+- When working in a corporate environment, for example, inside intel, proxy line is must-have, and you need to make a choice based on your Linux distribution versions.
+
+ For Ubuntu, openSUSE, and CentOS, append "ProxyCommand nc -X5 -x : %h %p", whereas for Fedora, append "ProxyCommand nc --proxy-type socks4 --proxy : %h %p".
+
+### Regarding Cloning through SSH/HTTP
+
+- PRC users may find it tricky to "communicate" with google server when downloading the Repo tool, initializing the repo, and synchronizing Tizen source.
+
+ Typical confusion is: No error message is displayed when downloading the Repo tool by using curl, but when proceeding to **repo init**, users may find the "hidden" issue come out of nowhere. In this case, keep in mind that this is an "communication" issue between PRC users and google, just clear your head and try running the commands with tsocks, some examples are shown below:
+
+ ```
+ $ tsocks curl http://commondatastorage.googleapis.com/git-repo-downloads/repo > ~/bin/repo$ tsocks repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen -m ivi.xml$ tsocks repo init -u https://:@review.tizen.org/gerrit/p/scm/manifest -b tizen -m ivi.xml
+ ```
+
+- When initializing and cloning through HTTP, users may be blocked by the "server certificate verification" issue, run the following command and try again:
+
+ ```
+ $ export GIT_SSL_NO_VERIFY=1
+
+
diff --git a/open_source/developing/faq.md b/open_source/developing/faq.md
new file mode 100755
index 0000000000..999daed13d
--- /dev/null
+++ b/open_source/developing/faq.md
@@ -0,0 +1,142 @@
+# FAQ
+
+[GBS]: (#gbs)
+[MIC]: (#mic)
+
+## GBS
+
+### Installation Related Issues
+
+Q: I'm unable to get zypper to refresh from [http://download.tizen.org/tools/openSUSE12.1/](http://download.tizen.org/tools/openSUSE12.1/), but I'm not getting an error of repo issue.
+
+A: This may be caused by proxy settings. Try double-checking the proxy settings and adding "-E" option when running **sudo zypper refresh** command, then see what happens. If problem is solved, preserve environment variables by modifying /etc/suders to solve the problem once and for all. Refer to Section 3 in [Setting up Development Environment](https://source.tizen.org/documentation/developer-guide/environment-setup) for details.
+
+Another possible reason is cached version at the proxy server. Try running the commands below to clean the cache:
+
+```
+# clean the cache from proxy server or remote http server.$ wget --no-cache http://download.tizen.org/tools/openSUSE12.1/repodata/repomd.xml$ zypper refresh$ zypper install gbs
+```
+
+Q: I installed GBS from the official repo, but it is trying to use source code from /usr/local/lib/python*.
+
+A: This may be because you have installed GBS from source code before. Remove it and re-install.
+
+Q: How do I update GBS and its dependencies?
+
+A: Refer to [Installing Development Tools](https://source.tizen.org/documentation/developer-guide/installing-development-tools).
+
+### gbs-build Related Issues
+
+Q: How can I make the priority of my local repo higher than the remote repo?
+
+A: It depends on the precedence of repos, the first repo has the highest priority. The precedence of local repos is by default higher than remote repos in GBS v0.10 and later.
+
+Q: 'gbs build' report build expansion error: nothing provides X needed by Y.
+
+A: The package you are trying to build is missing a dependency in the repo you specified. You may need to configure/add an additional repository. Try solving the problem by using the release repo instead of the snapshot repo.
+
+Q: 'gbs build' exits unexpectedly when installing packages to create build root.
+
+A: This may be caused by the change of remote repos. Try solving the problem by issuing **gbs-build** command with "--clean" option, as shown below:
+
+```
+$ gbs build -A --clean ...
+```
+
+Q: 'gbs build' exits with errors: have choice for XXXX needed by packagename: package1 package2.
+
+A: This may be because remote repo has two packages that provide XXXX, making GBS confused about which one to use. In this case, you need to download the build config and customize it by adding one of the following:
+
+```
+Prefer: package1
+```
+
+or
+
+```
+Prefer: package2
+```
+
+Q: 'gbs build' fails to create an arm build env on Ubuntu 11.10.
+
+A: This may be caused by qemu. 'qemu-user-static' has some issues with the Ubuntu official repo. Remove 'qemu-user-static' and install 'qemu-arm-static' from the Tizen tools repo by executing the following commands:
+
+```
+$ dpkg -r --force-depends qemu-user-static$ apt-get update$ apt-get install qemu-arm-static
+```
+
+### gbs-remotebuild Related Issues
+
+Q: I cannot access the Open Build Systems (OBS) during a remote build.
+
+A: The prerequisites of using **gbs-reomtebuild** include the following:
+
+- OBS account is available.
+- The authentication information is correctly configured in GBS configuration file.
+- The build server API and proxy settings are correctly configured in the development environment.
+
+Try solving the problem by checking these prerequisites one by one.
+
+### Proxy Related Issues
+
+Q: export no_proxy="localhost; 127.0.0.1; .company.com" does not work on Ubuntu.
+
+A: Set no_proxy as ".company.com" and try again.
+
+Q: 'gbs build' returns '500 Can't connect to xxx'.
+
+A: This is a known issue in the perl library which has been fixed in GBS 0.11. Try solving the problem by removing the trailing "/" in the proxy environment variable.
+
+Q: 'gbs build' returns '500 SSL negotiation failed error'
+
+A: This is caused by the proxy server setting. The proxy you specified cannot forward SSL correctly. Try using another proxy.
+
+### gbs-chroot Related Issues
+
+Q: 'gbs chroot -r ' report error: 'su: user root does not exist'.
+
+A: This is caused by missing "login" package while creating build root. Fix it by adding "root" user in /etc/passwd and /etc/group:
+
+```
+$ echo "root:x:0:0:root:/root:/bin/bash" >>path/to/buildroot/etc/passwd$ echo "root:x:0:" >>path/to/buildroot/etc/group
+```
+
+### Miscellaneous
+
+Q: [Fedora] gbs show error: " is not in the sudoers file. This incident will be reported".
+
+A: Update /etc/sudoers to give sudo permission.
+
+## MIC FAQ
+
+Q: When creating an image, MIC shows "Error : URLGrabber error: [http://www.example.com/latest/repos/oss/ia32/packages/repodata/repomd.xml](http://www.example.com/latest/repos/oss/ia32/packages/repodata/repomd.xml)"
+
+A: Perhaps your network has some issues, or your proxy doesn't work. Try another proxy or find out the network issue.
+
+Q: MIC complains "ERROR: found 1 resolver problem, abort!"
+
+A: This is not an issue of MIC, it's caused by the repo you used. Make sure the packages in the repo you used have proper dependencies.
+
+Q: I used '-A i586' to create an i586 image, but it showed "nothing provided ....". What's wrong with it?
+
+A: Use '-A i686'. i586 is lower than i686, so many packages will be missing from the installation.
+
+Q: Error shows: "uninstallable providers: somepackageA"
+
+A: It's caused by the missing package in the repo. To find it out, modify the %packages section with only one item 'somepackageA' in kickstart file, then you can root cause what's the missing dependency.
+
+Q: MIC shows in the log: "file /usr/share/whatever conflicts between attempted installs of somepackageA and somepackageB"
+
+A: There are conflicts between some packages in the repo you used, but this is not an issue with MIC. Please make sure you are using a proper repo.
+
+Q: Error shows: Command 'modprobe' is not available.
+
+A: In some distributions, when you use sudo, the PATH variable will be changed and you will lose some important paths. Run 'export PATH=/sbin:$PATH' before running MIC.
+
+Q: MIC lost some packages which are specified in '--includepkgs'/'--excludepkgs'
+
+A: Assume you want to include/exclude some packages in one repo, you will use '--includepkgs'/'--excludepkgs' option in the according repo command line, but you should list these packages to %packages section too, otherwise they will not take any effect.
+
+Q: How does mic select packages? And how to set the priority of a repo?
+
+A: In general, mic will select a higher version if two or more available in all repos, if the version is the same, a higher release number is prefferred. But if you assign a priority to one repo, mic will prefer to select packages from the repo with higher priority, even in case a higher version is available in the repo with a lower priority. Actually the default priority for a repo is 99, the range of a repo priority is 1~99, the larger number has the lower priority. An example is given: 'repo --name=base --baseurl=[http://whateverurl](http://whateverurl/) --prioirity=1'.
diff --git a/open_source/developing/installing.md b/open_source/developing/installing.md
new file mode 100755
index 0000000000..82a4c21f68
--- /dev/null
+++ b/open_source/developing/installing.md
@@ -0,0 +1,141 @@
+# Installing development tools
+
+PUBLISHED 21 DEC 2016
+
+## 1 Introduction
+
+This document provides information about how to install development tools in Ubuntu, openSUSE, Fedora, and CentOS, including the following:
+
+- **Git Build System (GBS):** command line tool that supports Tizen package development.
+- **Image Creator (MIC):** command line tool that supports Tizen image creation.
+- **bmaptool:** generic tool for creating the block map (bmap) for a file and copying files using the block map.
+
+**Note:** GBS and MIC are shown as examples because they are mandatory development tools for Tizen developers.
+
+For a list of all supported Linux distribution versions, refer to [Setting up Development Environment](https://source.tizen.org/documentation/developer-guide/environment-setup).
+
+## 2 Installing Development Tools
+
+This section provides information about installing development tools.
+
+### 2.1 Installing Development Tools in Ubuntu and Debian
+
+To install a development tool in Ubuntu, perform the following procedure:
+
+1. Open the source list by using text editor.
+
+ An example using VIM is shown below:
+
+ ```
+ $ sudo vim /etc/apt/sources.list
+ ```
+
+2. Add Tizen tools repository to the source list.
+
+ Take Ubuntu 16.04 as an example, append the following content in the source list:
+
+ ```
+ deb [trusted=yes] http://download.tizen.org/tools/latest-release/Ubuntu_16.04 /
+ ```
+
+ Take Ubuntu 14.04 as an example, append the following content in the source list:
+
+ ```
+ deb http://download.tizen.org/tools/latest-release/Ubuntu_14.04 /
+ ```
+
+ **Note:** Pay special attention to the space between the URL and "/".
+
+3. Resynchronize the package index files from the sources specified in the source list by executing the following command:
+
+ ```
+ $ sudo apt-get update
+ ```
+
+4. Install a development tool by executing the following command:
+
+ ```
+ $ sudo apt-get install
+ ```
+
+ An example of installing GBS and MIC is shown below:
+
+ ```
+ $ sudo apt-get install gbs mic
+ ```
+
+5. Upgrade a development tool by using one of following methods, as appropriate:
+
+ ```
+ $ sudo apt-get install
+ ```
+
+ or
+
+ ```
+ $ sudo apt-get update$ sudo apt-get upgrade
+ ```
+
+ **Note:** The apt-get update command is recommended because it upgrades one or more already installed packages without upgrading every package installed, whereas the apt-get upgrade command installs the newest version of all currently installed packages. In addition, apt-get update command must be executed before an upgrade to resynchronize the package index files.
+
+### 2.2 Installing Development Tools in openSUSE
+
+Install a development tool in openSUSE, perform the following procedure:
+
+1. Add Tizen tools repository to the source list.
+
+ Take openSUSE 12.1 as an example, execute the following command:
+
+ **Note:** Pay special attention to the space between the URL and "tools".
+
+ ```
+ $ sudo zypper addrepo http://download.tizen.org/tools/latest-release/openSUSE_12.1/ tools
+ ```
+
+2. Install a development tool by executing the following commands:
+
+ ```
+ $ sudo zypper refresh$ sudo zypper install
+ ```
+
+ An example of installing GBS and MIC is shown below:
+
+ ```
+ $ sudo zypper refresh$ sudo zypper install gbs mic
+ ```
+
+3. Upgrade a development tool by executing the following commands:
+
+ ```
+ $ sudo zypper refresh$ sudo zypper update
+ ```
+
+### 2.3 Installing Development Tools in Fedora and CentOS
+
+To install a development tool in Fedora and CentOS, perform the following procedure:
+
+1. Add Tizen tools repository to the source list.
+
+ Take Fedora 20 as an example, execute the following command:
+
+ ```
+ $ sudo wget -O /etc/yum.repos.d/tools.repo http://download.tizen.org/tools/latest-release/Fedora_20/tools.repo
+ ```
+
+2. Install a development tool by executing the following commands:
+
+ ```
+ $ sudo yum makecache$ sudo yum install
+ ```
+
+ An example of installing GBS and MIC is shown below:
+
+ ```
+ $ sudo yum makecache$ sudo yum install gbs mic
+ ```
+
+3. Upgrade a development tool by executing the following commands:
+
+ ```
+ $ sudo yum makecache$ sudo yum update
+ ```
\ No newline at end of file
diff --git a/open_source/developing/setting_up.md b/open_source/developing/setting_up.md
new file mode 100755
index 0000000000..f0c6b85878
--- /dev/null
+++ b/open_source/developing/setting_up.md
@@ -0,0 +1,207 @@
+# Setting up Development Environment
+
+PUBLISHED 21 DEC 2016
+
+## 1 Introduction
+
+This document provides information about how to set up development environment in the following Linux distributions:
+
+- Ubuntu 16.04
+
+- Ubuntu 14.04
+
+- Ubuntu 12.04
+
+- openSUSE 13.1
+
+- openSUSE 12.3
+
+- openSUSE 12.2
+
+- Fedora 20
+
+- Fedora 19
+
+- CentOS 6
+
+- Debian 7
+
+ **Note:** All Tizen platform tools, including Git Build System (GBS), Image Creator (MIC), and bmap-tools, support these popular Linux distribution versions with official support. CentOS is an exception for not providing official support.
+
+## 2 Setting up Gerrit Access
+
+This section describes how to set up Gerrit access, including the following:
+
+- How to register user account to gain access to tizen.org
+- How to configure Secure Shell (SSH) for Gerrit access
+- How to configure Git
+
+### 2.1 Registering User Account
+
+To register user account to gain access to tizen.org, perform the following procedure:
+
+1. Open the [Register Page](https://www.tizen.org/user/register).
+
+2. Fill in the mandatory fields and other necessary information, then click **Register**.
+
+ Gerrit will send a verification e-mail to the e-mail address provided by the user.
+
+3. Follow the instructions in the verification e-mail to verify the e-mail, change the password and gain access to tizen.org.
+
+ **Note:** If an error message is received upon clicking the link in the verification e-mail, copy the link to the address bar of the browser directly.
+
+At this point, the prerequisites of accessing [Tizen Gerrit](http://review.tizen.org/gerrit/) is ready, move on the Section 2.2 to actually enable the access to [Tizen Gerrit](http://review.tizen.org/gerrit/).
+
+### 2.2 Configuring SSH for Gerrit Access
+
+To configure SSH for Gerrit access, perform the following procedure:
+
+1. Generate RSA keys by executing the following command:
+
+ ```
+ $ ssh-keygen [-t rsa] [-C ""]
+ ```
+
+ **Note:** "[-t rsa]" and "[-C ""]" are both optional arguments for ssh-keygen command.
+
+ If invoked, without specifying key type, ssh-keygen command will generate an RSA key for use in SSH protocol 2 connections, thus making "[-t rsa]" that specifies the key type optional.
+
+ For RSA key, if invoked without adding any comment, ssh-keygen command initializes the comment as "@" when the key is generated, thus making "[-C ""]" optional. In spite of this, adding this argument is recommended because a rephrased comment can help better identify the keys.
+
+ Follow the on-screen prompt below to specify the file in which to save the key. When pressing ENTER directly, the default value "/home//.ssh/id_rsa" is used, as shown in the parentheses.
+
+ ```
+ Enter file in which to save the key (/home//.ssh/id_rsa):
+ ```
+
+ Then follow the on-screen prompt below to set a passphrase. Pressing ENTER directly indicates no passphrase, as shown in the parentheses.
+
+ ```
+ Enter passphrase (empty for no passphrase):Enter same passphrase again:
+ ```
+
+ At this point, the SSH keys are successfully generated.
+
+2. Create an SSH configuration file "~/.ssh/config" and add one of the following, as appropriate:
+
+ - Ubuntu, openSUSE, CentOS,and Debian
+
+ ```
+ Host tizen review.tizen.orgHostname review.tizen.orgIdentityFile ~/.ssh/id_rsaUser Port 29418# Add the line below when using proxy, otherwise, skip it.# ProxyCommand nc -X5 -x : %h %p
+ ```
+
+ - Fedora
+
+ ```
+ Host tizen review.tizen.orgHostname review.tizen.orgIdentityFile ~/.ssh/id_rsaUser Port 29418# Add the line below when using proxy, otherwise, skip it.# ProxyCommand nc --proxy-type socks4 --proxy : %h %p
+ ```
+
+
+ - **Note:**
+
+ Both "tizen" and "review.tizen.org" are aliases of the hostname, "tizen" is configured for simplicity of commands when initializing git repositories and cloning specific Tizen project, "review.tizen.org" is configured to work with manifest.xml and _remote.xml when synchronizing the entire Tizen source.~/.ssh/config must not be written by others users. Make sure to remove the write permission by executing '$ chmod o-w ~/.ssh/config'. For more details about ssh_config, refer to man ssh_config.
+
+3. Copy the the full text in ~/.ssh/id_rsa.pub, including all of the following:
+
+ - "ssh-rsa" lead
+ - SSH public key
+ - e-mail address tail
+
+4. Log in to [Tizen Gerrit](http://review.tizen.org/gerrit/) and upload the key.
+
+ 1. In the Gerrit web page, click the user name on the upper right corner (with a inverted triangle on the right), then click **Settings** to display the **Settings** web page.
+ 2. Click **SSH Public Keys** in the left panel, paste the text copied in step-03 to the **Add SSH Public Key** box, and click **Add**.
+
+5. Verify SSH Connection by executing the following command:
+
+ ```
+ $ ssh tizen
+ ```
+
+ The message below indicates that SSH connection has been established successfully.
+
+ ```
+ **** Welcome to Gerrit Code Review ****...
+ ```
+
+### 2.3 Configuring Git for Gerrit Access
+
+Git must know the user's name and e-mail address to determine the author of each commit. If the user name or e-mail address is not set up in a way that Git can find it, the user may encounter some odd warnings.
+
+This configuration operation requires developer access. In addition, matching the e-mail address with the one registered in contact information, which helps Git determine a user, is recommended.
+
+To configure Git for Gerrit access, perform the following procedure:
+
+1. Set the user name by executing the following command:
+
+ ```
+ $ git config --global user.name
+ ```
+
+2. Set the e-mail address by executing the following command:
+
+ ```
+ $ git config --global user.email ""
+ ```
+
+ **Note:** Using the GIT_AUTHOR_NAME and GIT_AUTHOR_EMAIL environment variables is an alternative solution. These variables override all configuration settings once set.
+
+## 3 Working through Network Proxy (Optional)
+
+This section describes how to work through network proxy.
+
+**Note:** It is particularly useful if you also track other git repositories for which you do not already have a dedicated 'ProxyCommand' in your ~/.ssh/config or for those using "git://" or "http://".
+
+### 3.1 Configuring Proxy
+
+To configure proxy through Linux shell prompt, perform the following procedure:
+
+1. Open .bashrc file and set http_proxy, ftp_proxy, https_proxy, and no_proxy environment variables by adding the following content:
+
+ ```
+ export http_proxy=:export ftp_proxy=$http_proxyexport https_proxy=:export no_proxy=
+ ```
+
+2. Open /etc/sudoers and preserve environment variables by adding the content below:
+
+ ```
+ Defaults env_keep="http_proxy https_proxy no_proxy"
+ ```
+
+ **Note:** Replace "=" with "+=" if previous settings of env_keep already exists in /etc/sudoers.
+
+### 3.2 Configuring Git Access through the Proxy
+
+To allow Git access through the proxy, perform the following procedure:
+
+1. Create a script named "git-proxy" in "/usr/local/bin" directory by using text editor.
+
+ Here's an example using VIM:
+
+ ```
+ $ sudo vim /usr/local/bin/git-proxy
+ ```
+
+2. Add the content below and save the file.
+
+ ```
+ #!/bin/bash PROXY=PORT= case $1 in# list git servers here that you do not want to use# the proxy with, separated by a pipe character '|' as below: review.tizen.org)METHOD="-X connect";;*)METHOD="-X 5 -x ${PROXY}:${PORT}"#The line above is applicable to Ubuntu and openSUSE.#For Fedora, use the variation below since it only supports socks v4.#METHOD="-X 4 -x ${PROXY}:${PORT}";;esac nc $METHOD $*
+ ```
+
+3. Change the attribute of git-proxy script to make it executable by executing the following command:
+
+ ```
+ $ sudo chmod +x /usr/local/bin/git-proxy
+ ```
+
+4. Set GIT_PROXY_COMMAND and GIT_PROXY_IGNORE environment variables by adding the following content in the .bashrc file.
+
+ ```
+ export GIT_PROXY_COMMAND=/usr/local/bin/git-proxyexport GIT_PROXY_IGNORE=
+ ```
+
+5. Run the following command to apply the changes:
+
+ ```
+ $ source ~/.bashrc
+ ```
\ No newline at end of file
diff --git a/open_source/menu_guide.md b/open_source/menu_guide.md
new file mode 100755
index 0000000000..1c96f68470
--- /dev/null
+++ b/open_source/menu_guide.md
@@ -0,0 +1,36 @@
+
+| Documentation | | | |
+| ------------------------ | ---------------------------------------- | ---------------------------------------- | --------------------------------- |
+| | | | |
+| Title | | Orignal Page | |
+| Overview | | | |
+| | Tizen Development Working Mechanism | | Codelines, Branches, and Releases |
+| | License | | |
+| | Typographic Conventions | | |
+| | | | |
+| Getting Started | | | |
+| | Setting up Development Environment | | Downloading and Building |
+| | Installing Development Tools | | Establishing a Build Environment |
+| | Cloning Tizen Source | | Downloading the Source |
+| | Building Packages Locally with GBS | | Preparing to Build |
+| | Contributing Code to Tizen | | Compiling with Jack |
+| | Creating Tizen Images with MIC | | Selecting Devices |
+| | Tips and Heads-up | | Running Builds |
+| | | | Building Kernels |
+| Devices | | | Known Issues |
+| | Porting Guides | | |
+| | | | |
+| All-in One Instructions | 삭제 | | |
+| | Creating Tizen IVI Images Based on Specific Snapshot in One Page | Getting Started 문서와 비교해서 내용이 같으면 삭제 ivi 기준으로 설명하고 있기때문에 Reference로 보내도 됨 | |
+| | Creating Tizen Images from Scratch in One Page | 삭제 | |
+| | One-Click Solution for Tizen Image Creation based on Jenkins Framework | 삭제 | |
+| FAQs | | | |
+| | Tips and Heads-up | | |
+| | Tizen Development Tools | | |
+| | | | |
+| Reference | | | |
+| | Git Build System | | |
+| | MIC Image Creator | | |
+| | The bmaptool | | |
+| | Gerrit Usage | | |
+| | Flash to Device | | |
diff --git a/open_source/porting/introduction.md b/open_source/porting/introduction.md
new file mode 100755
index 0000000000..f7608f7c3e
--- /dev/null
+++ b/open_source/porting/introduction.md
@@ -0,0 +1,83 @@
+# Introduction
+
+Tizen is a standards-based platform that provides Web and native APIs for developing [applications](https://wiki.tizen.org/Applications) for multiple [device](https://wiki.tizen.org/index.php?title=Device&action=edit&redlink=1) categories. Tizen is currently targeted for smartphones and tablet devices, though more device types will be available in the future.
+
+## Tizen Architecture
+
+The following figure illustrates the Tizen architecture for smartphone and tablet devices.
+
+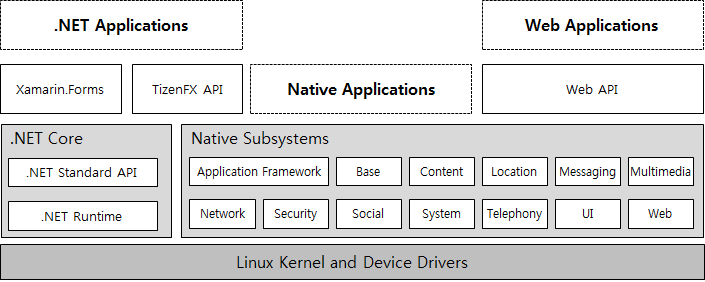
+
+You can get detailed information of the Tizen framework layer from Dev Guide[[1\]](https://developer.tizen.org/development/getting-started/overview#type)
+
+## The Core Layer
+
+### Tizen Core Services
+
+#### Application Framework
+
+The Application Framework provides application management, including launching other applications using the package name, URI, or MIME type. It also launches predefined services, such as the system dialer application. The Application Framework also notifies applications of common events, such as low memory events, low battery, changes in screen orientation, and push notifications.
+
+#### Base
+
+Base contains [GNU](https://wiki.tizen.org/index.php?title=GNU&action=edit&redlink=1)/[Linux](https://wiki.tizen.org/Linux) * base essential system libraries that provide key features, such as database support, internationalization, and XML parsing.
+
+#### Connectivity
+
+Connectivity consists of all network and connectivity related functionalities, such as 3G, Wi-Fi, Bluetooth, HTTP, and NFC (Near Field Communication). Data network is based on ConnMan (Connection manager), which provides 3G and Wi-Fi based network connection management.
+
+#### Graphics and UI
+
+Graphics and UI consist of the system graphic and UI stacks, which includes EFL (Enlightenment Foundation Libraries), window management system (x11 for Tizen 2.x / wayland for Tizen 3.0), input methods, and OpenGL® ES APIs.
+
+EFL, the heart of the graphics component, is a suite of libraries. EFL is used to create rich graphics with ease, for all UI resolutions. The libraries build UIs in layers, allowing for 3D transformations and more. EFL includes the Evas canvas API library and the elementary widget library.
+
+WebKit-based graphics is provided as well capable of running within a full browser UI or dedicated Web Runtime (without browser window), all based on Tizen's own HTML5 canvas WebKitEFL implementation. WebGL is supported too and Web-based frameworks for UI such as jQuery Mobile are also offered, what may help with porting existing jQuery code.
+
+#### Location
+
+Location provides location based services (LBS), including position information, geocoding, satellite information, and GPS status. It delivers location information from various positioning sources, such as GPS, WPS (Wi-Fi Positioning System), Cell ID, and sensors.
+
+#### Messaging
+
+Messaging consists of Message and Email. The Message supports SMS, MMS, and cell broadcast messages. Email supports protocols such as SMTP, IMAP, and POP3.
+
+#### Multimedia
+
+Multimedia is based on GStreamer. It provides support for media, including video, audio, imaging, and VoIP. It also provides media content management for managing media file metadata information.
+
+#### PIM (Personal Information Management)
+
+PIM enables managing user data on the device, including managing calendar, contacts, tasks, and retrieving data about the device context (such as device position and cable status).
+
+#### Security
+
+Security is responsible for security deployment across the system. It consists of the platform security enablers, such as access control, certificate management, and secure application distribution.
+
+For more information, see [Security/Tizen 3.0 security porting guide](https://wiki.tizen.org/wiki/Security/Tizen_3.0_security_porting_guide) and [All 3.X security pages](https://wiki.tizen.org/wiki/Security#All_3.X_security_pages).
+
+#### System
+
+System consists of service (process), device, and resource management features, including:
+
+- Interfaces for accessing devices, such as sensors, display, or vibrator
+- Power management, such as LCD display backlight dimming/off and application processor sleep
+- Monitoring devices and handling events, such as USB, MMC, charger, and ear jack events
+- Resource management, such as CPU quota control and low memory management
+- Service management, such as watchdog management and capability control
+
+#### Telephony
+
+Telephony consists of cellular functionalities communicating with the modem:
+
+- Provides call services (single call and multiparty call).
+- Provides call-related and non-call-related supplementary services (call waiting, barring, and forwarding and USSD).
+- Supports GSM, UMTS, LTE and CDMA network services.
+- Provides packet services and network status information.
+- Provides SMS-related services.
+- Provides SIM card functionalities (SIM phonebook, SIM EF files, SIM Application Toolkit support)
+
+#### Web
+
+Web provides a complete implementation of the Tizen Web API optimized for low power devices. It includes WebKit, which is a layout engine designed to allow Web browsers to render Web pages. It also provides Web runtime for Web applications.
+
diff --git a/open_source/porting/kernel.md b/open_source/porting/kernel.md
new file mode 100755
index 0000000000..7c3da84ffc
--- /dev/null
+++ b/open_source/porting/kernel.md
@@ -0,0 +1,214 @@
+# Development Environment Setup
+
+To set up the Tizen OS development environment and to obtain information regarding development, see [Developing](../developing/01_setting_up.md )
+
+
+
+## Kernel Build
+
+To build the Tizen kernel for the TM1 board:
+
+1. Install and setup cross compile tools on your system if the target and host are different (such as x86).
+2. Prepare the kernel source code for TM1 from `profile/mobile/platform/kernel/linux-3.10-sc7730`.`git: https://review.tizen.org/git/?p=profile/mobile/platform/kernel/linux-3.10-sc7730.git``branch: accepted/tizen_mobile`
+3. If your kernel source has been used to create binaries for other architecture, start by cleaning them up.
+4. Setup the `.config` file for TM1.`$ make ARCH=arm tizen_tm1_defconfig`
+5. After reconfiguring your needs (such as `make ARCH=arm menuconfig`) or using the stock configuration (no modifications), build it.`$ make ARCH=arm zImage``$ make ARCH=arm dtbs`
+6. Create `devicetree` and `zImage` merged image with image tools.`$ scripts/sprd_dtbtool.sh -o arch/arm/boot/merged-dtb -p scripts/dtc/ -v arch/arm/boot/dts/``$ scripts/sprd_mkdzimage.sh -o arch/arm/boot/dzImage -k arch/arm/boot/zImage -d arch/arm/boot/merged-dtb`
+7. Build and make kernel module image as well. Note that you may need to do sudo first to let `sudo -n` work in the script.`$ sudo ls``$ scripts/mkmodimg.sh`
+8. Make a `.tar` archive from `dzImage` and `modules.img`.You can make your own `.tar` file from the 2 files.`$ tar cf FILENAME_YOU_WANT.tar -C arch/arm/boot dzImage -C ../../../usr/tmp-mod modules.img`
+9. Send the `.tar` image to the target using `lthor`.`$ lthor FILENAME_YOU_WANT.tar`
+
+## Image Build
+
+To create the image by using MIC, see [MIC Image Creator](https://source.tizen.org/documentation/reference/mic-image-creator).
+
+
+
+# Tizen Bootup Overview[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide&action=edit§ion=5)]
+
+This section provides a brief overview of the typical booting sequence, starting from the boot loader to the kernel and the platform.
+
+[](https://wiki.tizen.org/File:Boot-1.png)
+
+## Kernel Bootup[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Bootup_Overview&action=edit§ion=T-1)]
+
+The Tizen bootup process is the same as any other [Linux](https://wiki.tizen.org/Linux) kernel. Just make sure that the correct machine ID and the boot arguments are passed from the boot loader.
+
+## Platform Bootup[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Bootup_Overview&action=edit§ion=T-2)]
+
+After mounting the initial RAM disk image, `initramfs` hands over the control to `systemd` as system manager daemon in the Tizen platform. From this point, `systemd` is responsible for probing all remaining hardware, mounting all necessary file systems and spawning all configured services. Basically system boot-up process is split up in various discrete steps. To synchronize point during start-up, target units (some file whose name ends in `.target`) are used for grouping units. The boot-up process is highly parallelized in each target so that the order in which specific target units are reached is not deterministic. The `system-plugin-slp` is an OAL plugin for configuration setting such as mount point (`/etc/fstab`).
+
+The following figure shows the early boot sequence after starting the kernel.
+
+[](https://wiki.tizen.org/File:Boot-2.png)
+
+- `sysinit.target`Special target unit for early boot-up scriptsIt has dependencies on necessary services and targets, such as `local-fs.target/opt`, `/tmp`, and `/media` are mounted and the `systemd` related daemons, such as `systemd-journald` are launched.
+
+
+- `basic.target`Special target unit for basic boot-up.At this point, all necessary initialization for general purpose daemons such as mount points, sockets, timers, and path units are completed.Tizen specific services (such as `vconf-setup` and `tizen-debug-level`) also are executed.
+
+
+- `bootmode.target`Special target unit for selecting the boot mode.If kernel boot parameter (`/proc/cmdline`) has the `charger_detect_boot` option passed by the boot loader such as `uboot`, the platform boots up as charging mode. In this mode, the system enters the low power mode and charges the battery.If the `charger_detect_boot` option is not included as the kernel boot parameter, normal boot is started.
+
+The following figure shows the overview of normal booting sequence in Tizen platform.
+
+[](https://wiki.tizen.org/File:Boot-3.png)
+
+- `multi-user.target`Special target unit for setting up a multi-user system which is non-graphical support.In Tizen platform, this target is used for launching platform infrastructure daemons such as `dbus` (system session), power manager, GPS manager, telephony daemon, WRT (Web Run Time) security daemon, and media server.Some `systemd` related daemons (such as `systemd-logind`) are also started in this phase.
+
+
+- `graphical.target`Special target unit for setting up a graphical environment.Some important daemons (such as access control server and OMA DS agent server) that must have root permission are launched at this point.Tizen platform uses the `systemd` user session for App privilege daemons.Some daemons related with graphic system such as Enlightenment (Windows manager) are launched as App privilege in this phase.Tizen platform has its special target for middleware and mobile service: `tizen-middleware.target` starts the platform service daemons, such as calendar, contacts, email, message, sound, and download provider. `tizen-mobile-session.target` starts some service daemons related with the mobile session.
+
+# BSP Customization[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide&action=edit§ion=6)]
+
+This section covers the basic configuration, setup, and build procedure required for building the boot loader and the kernel image for [ARM](https://wiki.tizen.org/ARM).
+
+## Boot Loader Fundamentals[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/BSP_Customization&action=edit§ion=T-1)]
+
+Boot loader is a small piece of software that is required to perform the basic hardware and peripheral initialization and load the kernel and proper device tree binary for the device to RAM. For the Tizen platform, the boot loader comes in 2 parts. The first part is the primary boot loader and the second part is the secondary boot loader. The primary boot loader is the proprietary boot loader. The secondary boot loader is the open source boot loader u-boot, which is customized further for the Tizen platform.
+
+If your platform is already loaded with the compatible boot loader software, you can skip this section and move directly to the kernel section.
+
+## Boot Loader Setup and Build[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/BSP_Customization&action=edit§ion=T-2)]
+
+To build the Tizen TM1 boot loader:
+
+1. Install and setup cross compile tools on your system if the target and your host are different (such as x86).
+2. Start with cleaning up the `u-boot-tm1` source. (Download the source from the [u-boot-tm1](https://review.tizen.org/git/?p=profile/mobile/platform/kernel/u-boot-tm1.git;a=summary) repository.)`$ make distclean`
+3. Set up the configration for TM1.
+4. Build `u-boot`.`$ make ARCH=arm`
+5. Once the build is successful, the `u-boot.bin` file is created. (This step is for preventing from flashing the other `u-boot.bin` file.)`$ tools/mkimage_signed.sh u-boot.bin "tizen_tm1"`
+6. After the scrip is run, the `u-boot-mmc.bin` file is created.
+7. Create a boot loader tarball to download the `u-boot` binary onto the target.`$ tar cvf bootloader.tar u-boot-mmc.bin`
+
+Be careful when you modify the boot loader, as there is a risk of breaking the device for good.
+
+## Boot Loader Kernel Parameters[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/BSP_Customization&action=edit§ion=T-3)]
+
+The command line parameters can be passed from boot loader to [Linux](https://wiki.tizen.org/Linux) kernel. Here are some example command line parameters:
+
+```
+ Example:
+ console=ttyS1,115200n8
+ mem=1024M
+ loglevel=1
+
+```
+
+# Kernel Fundamentals[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide&action=edit§ion=7)]
+
+The kernel is the operating system that drives the platform. In this case, the kernel refers to the open source [Linux](https://wiki.tizen.org/Linux) kernel that is customized for the Tizen platform. The following section gives a brief overview about the Tizen kernel setup, configuration, and the build procedure for building a Linux kernel for your Tizen platform. The output of the kernel binary is a uImage that is suitable only for a `u-boot` boot loader. If you have chosen a secure booting configuration in your boot loader, this uImage must be compatible with your boot loader.
+
+## Kernel Configurations[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-1)]
+
+To download the Tizen kernel source package, see [Getting Source Code and Build](https://wiki.tizen.org/Porting_Guide#Getting_Source_Code.26Build). Set up or modify your kernel configuration, use the appropriate `defconfig` file from `arch/arm/configs/` ( [ARM](https://wiki.tizen.org/ARM) CPU ).
+
+For more detailed information about Tizen kernel configuration and kernel building, see [Kernel Build](https://wiki.tizen.org/Porting_Guide#Kernel_Build).
+
+| Note |
+| ---------------------------------------- |
+| Tizen uses `INOTIFY` instead of `DNOTIFY`. You must disable `DNOTIFY` from your kernel configuration. |
+
+If you want to use `initramfs`, you can use these configurations:
+
+- `CONFIG_INITRAMFS_SOURCE`
+- `CONFIG_INITRAMFS_ROOT_UID`
+- `CONFIG_INITRAMFS_ROOT_GID`
+- `CONFIG_INITRAMFS_COMPRESSION_NONE/GZIP/BZIP2/LZNA/LZO`
+
+## Tizen File System[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-2)]
+
+### Virtual Filesystem (VFS )[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-3)]
+
+The virtual file system (VFS) is an abstraction layer on top of a more concrete file system (such as ext2, jfs, and ext4). The VFS provides a switching layer between the SCI (system call interface) and the file systems supported by the kernel, as shown in the following figure.
+
+[](https://wiki.tizen.org/File:Filesystem.png)
+
+At the top of the VFS is a common API abstraction of functions, such as open, close, read, and write. At the bottom of the VFS are the file system abstractions that define how the upper-layer functions are implemented with respect to specific file system.
+
+Below the file system layer is the page cache, which provides a common set of functions to the file system layer (independent of any particular file system). This caching layer optimizes access to the physical devices by keeping data around for a short time (or speculatively read ahead, so that the data is available when needed). Below the page cache are the device drivers, which implement the interface for the particular physical device.
+
+### Tizen Partition Layout[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-4)]
+
+The following description is an example of the Tizen partition layout. The product vendor can modify the sequence or partition layout for their devices, as needed.
+
+[](https://wiki.tizen.org/File:Partitionlayout.png)
+
+The `boot` partition is mounted in the `/boot` directory of `rootfs`. Here `s-boot`, `u-boot`, and the kernel image are saved as a file format, provided as `system.tar`.
+
+1. The CSA (Configuration Saved Area) partition is for non-volatile data, such as the calibration value of modem.
+2. The boot partition includes the kernel image, boot loader image, and modem image. Additionally, it can have device driver modules.
+3. Third partition is reserved for the future.
+4. The `platform` partition is mounted on the root directory. It contains fundamental frameworks for Tizen and some general utility for Linux. It canbe provided as a `platform.img` file.
+5. The `data` partition is mounted in the `/opt` directory and it includes applications, libraries of applications, and the platform database. It can be provided as a `data.img` file.
+6. The CSC (Customer Software Configuration) partition is mounted in the `/mnt/csc` directory. It can store the customer’s software configuration, such as the default language and time zone.
+7. The UMS (USB Mass Storage) partition is mounted in the `/opt/media` directory and it includes default (media) contents. It can be provided as `ums.img`.
+8. Each image file, `platform.img`, `data.img`, and `ums.img` can be zipped for downloading, for example, `.tar.gz`.
+
+### File System Hierarchy Standard in Tizen[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-5)]
+
+Each partition has the hierarchy illustrated in the following figure.
+
+[](https://wiki.tizen.org/File:Filesystemhierarchy.png)
+
+### Supported File Systems in Tizen[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-6)]
+
+Tizen supports the Extended 4 (ext4) file system. The Tizen kernel has to be compiled to enable support for the other file systems like JFS, XFS, BTRFS, and Reiserfs.
+
+### Default File System in Tizen[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-7)]
+
+The Extended 4 (ext4) file system is configured as a default file system for Tizen.
+
+### Configuration[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-8)]
+
+The ext4 kernel configuration is done like this standard kernel configuration.
+
+### Reference[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-9)]
+
+These are the configuration options to be enabled in the kernel configuration file.
+
+- `CONFIG_EXT4_FS=y`
+- `CONFIG_EXT4_FS_XATTR=y`
+- `CONFIG_EXT4_USE_FOR_EXT23=y`
+- `CONFIG_EXT4_FS_SECURITY=y`
+
+## MMC/SD/SDIO[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-10)]
+
+### Description[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-11)]
+
+Tizen supports MultiMediaCard, Secure Digital, and Secure Digital I/O Support. The MMC driver is implemented on top of host controller (such as SDHCI controller driver) and supports MMC, SD, SD High Speed, and SDHC cards.
+
+If MMC is your booting device, read-write APIs, partition management, and flashing must be provided at the boot loader.
+
+[](https://wiki.tizen.org/File:Mmc.png)
+
+### MSHCI/SDHCI Features Overview[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-12)]
+
+The MMC/SD/SDIO driver supports the following features:
+
+- The driver is built in-kernel
+- MMC cards, including high speed cards
+- SD cards, including SD high speed and SDHC cards
+
+MMC subsystem code structure in the kernel is located at `/driver/mmc`.
+
+MMC subsystem structure is divided into 3 parts:
+
+- MMC block device driver located at `/driver/mmc/card/`
+- Protocol stack for MMC, SD, SDIO located at `/driver/mmc/core/`
+- Host controller driver located at `/driver/mmc/host/`
+
+### Hotplug MMC Event Handling in Tizen[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-13)]
+
+Based on the hotplug event handling, the notification is passed to the `deviced` for device status changes. It detects, mounts, and monitors the status of the SD card.
+
+### Reference[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Kernel_Fundamentals&action=edit§ion=T-14)]
+
+The SDHCI controller is supported in the MMC/SD/SDIO interface. The Mobile Storage Host controller is only supported in the MMC interface.
+
+- **Kernel Configuration for MMC Interface**`CONFIG_MMC_BLOCK``CONFIG_MMC``CONFIG_MSHCI` (for Mobile Storage Interface enable)`sys interface: /dev/mmcblk0pX`
+
+
+- **Kernel Configuration for SD/SDIO Interface**`CONFIG_MMC_BLOCK``CONFIG_MMC``CONFIG_MMC_SDHCI` (for SDHCI host Interface enable)`CONFIG_MMC_SDHCI_S3C` (for Samsung SoC)`sys interface: /dev/mmcblk1pX`
+
+The `X` denotes the MMC partition number. Details of the partition mount point for Tizen are covered under [Tizen Partition Layout](https://wiki.tizen.org/Porting_Guide#Tizen_Partition_Layout).
\ No newline at end of file
diff --git a/open_source/porting/port.md b/open_source/porting/port.md
new file mode 100755
index 0000000000..8888b2714f
--- /dev/null
+++ b/open_source/porting/port.md
@@ -0,0 +1,5135 @@
+# Tizen 3.0 Porting Guide
+
+## Contents
+
+ [[hide]()]
+
+- [1Introduction](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Introduction)[1.1About Tizen](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#About_Tizen)[1.2Purpose of This Document](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Purpose_of_This_Document)
+- [2Tizen Architecture](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Tizen_Architecture)[2.1The Core Layer](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#The_Core_Layer)[2.1.1Tizen Core Services](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Tizen_Core_Services)[2.1.1.1Application Framework](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Application_Framework)[2.1.1.2Base](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Base)[2.1.1.3Connectivity](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Connectivity)[2.1.1.4Graphics and UI](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Graphics_and_UI)[2.1.1.5Location](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Location)[2.1.1.6Messaging](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Messaging)[2.1.1.7Multimedia](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Multimedia)[2.1.1.8PIM (Personal Information Management)](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#PIM_.28Personal_Information_Management.29)[2.1.1.9Security](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Security)[2.1.1.10System](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#System)[2.1.1.11Telephony](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Telephony)[2.1.1.12Web](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Web)
+- [3Development Environment Setup](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Development_Environment_Setup)
+- [4Getting the Source Code and Build](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Getting_the_Source_Code_and_Build)[4.1Platform Build](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Platform_Build)[4.2Kernel Build](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Kernel_Build)[4.3Image Build](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Image_Build)
+- [5Tizen Bootup Overview](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Tizen_Bootup_Overview)[5.1Kernel Bootup](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Kernel_Bootup)[5.2Platform Bootup](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Platform_Bootup)
+- [6BSP Customization](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#BSP_Customization)[6.1Boot Loader Fundamentals](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Boot_Loader_Fundamentals)[6.2Boot Loader Setup and Build](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Boot_Loader_Setup_and_Build)[6.3Boot Loader Kernel Parameters](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Boot_Loader_Kernel_Parameters)
+- [7Kernel Fundamentals](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Kernel_Fundamentals)
+- [8System](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#System_2)[8.1Partition and Filesystem](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Partition_and_Filesystem)[8.1.1Tizen Partition Layout](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Tizen_Partition_Layout)[8.1.2Supported Filesystems in Tizen](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Supported_Filesystems_in_Tizen)[8.1.3File-system Hierarchy Standard in Tizen](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#File-system_Hierarchy_Standard_in_Tizen)[8.2System Framework](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#System_Framework)[8.2.1systemd](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#systemd)[8.2.2resourced](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#resourced)[8.2.3deviced](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#deviced)[8.2.4dlog](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#dlog)[8.2.5Porting Smart Development Bridge (SDB)](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_Smart_Development_Bridge_.28SDB.29)[8.2.6Porting Device HAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_Device_HAL_Interface)[8.2.6.1Battery HAL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Battery_HAL)[8.2.6.2Display HAL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Display_HAL)[8.2.6.3External Connector HAL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#External_Connector_HAL)[8.2.6.4LED HAL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#LED_HAL)[8.2.6.5IR HAL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#IR_HAL)[8.2.6.6Touchscreen HAL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Touchscreen_HAL)[8.3Sensor Framework](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Sensor_Framework)[8.3.1Types of Sensors](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Types_of_Sensors)[8.3.2Architectural Overview](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Architectural_Overview)[8.3.3Components of the Sensor Framework](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Components_of_the_Sensor_Framework)[8.3.4Porting HAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_HAL_Interface)[8.3.4.1Sensor](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Sensor)[8.3.4.2Sensorhub](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Sensorhub)[8.3.5References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References)[8.3.6Project Git Repository](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Project_Git_Repository)[8.3.7Test and Verify Sensors](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Test_and_Verify_Sensors)
+- [9Graphics and UI](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Graphics_and_UI_2)[9.1Buffer Management](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Buffer_Management)[9.1.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface)[9.1.2TBM Backends](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#TBM_Backends)[9.1.3Reference](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Reference)[9.2Display Management](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Display_Management)[9.2.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_2)[9.2.2TDM backends](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#TDM_backends)[9.2.3References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_2)[9.3Input Management](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Input_Management)[9.3.1libinput](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#libinput)[9.3.2libevdev](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#libevdev)[9.3.3mtdev](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#mtdev)[9.3.4libinput backends](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#libinput_backends)[9.4OpenGL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#OpenGL)[9.4.1Tizen OpenGL ES and EGL Architecture](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Tizen_OpenGL_ES_and_EGL_Architecture)[9.4.2Tizen Porting Layer (TPL) for EGL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Tizen_Porting_Layer_.28TPL.29_for_EGL)[9.4.3Tizen Porting Layer for EGL Object Model](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Tizen_Porting_Layer_for_EGL_Object_Model)[9.4.3.1TPL-EGL Core Object](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#TPL-EGL_Core_Object)[9.4.3.2TPL-EGL Objects and Corresponding EGL Objects](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#TPL-EGL_Objects_and_Corresponding_EGL_Objects)[9.4.3.3TPL-EGL Frontend API](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#TPL-EGL_Frontend_API)[9.4.3.3.1TPL-EGL Object](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#TPL-EGL_Object)[9.4.3.3.2TPL-EGL Display](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#TPL-EGL_Display)[9.4.3.3.3TPL-EGL Surface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#TPL-EGL_Surface)[9.4.3.4TPL-EGL and Wayland Server and Client](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#TPL-EGL_and_Wayland_Server_and_Client)[9.4.3.5Buffer Flow Between the Wayland Server and GLES/EGL Driver](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Buffer_Flow_Between_the_Wayland_Server_and_GLES.2FEGL_Driver)[9.4.4Project Git Repository](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Project_Git_Repository_2)[9.4.5libtpl-egl Reference Driver](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#libtpl-egl_Reference_Driver)[9.4.6Test and Verify the OpenGL ES Driver](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Test_and_Verify_the_OpenGL_ES_Driver)
+- [10Multimedia](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Multimedia_2)[10.1Camera](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Camera)[10.1.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_3)[10.1.1.1GStreamer Camera Plugin](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#GStreamer_Camera_Plugin)[10.1.1.2Camera HAL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Camera_HAL)[10.1.1.2.1Major Functions](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Major_Functions)[10.1.2Configuration](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Configuration)[10.1.3References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_3)[10.2Radio](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Radio)[10.2.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_4)[10.2.1.1Radio HAL](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Radio_HAL)[10.2.1.2Major Functions](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Major_Functions_2)[10.2.2References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_4)[10.3Audio](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Audio)[10.3.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_5)[10.3.2Configuration](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Configuration_2)[10.3.3References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_5)[10.4Player](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Player)[10.4.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_6)[10.4.2Configuration](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Configuration_3)[10.4.3References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_6)[10.5Codec](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Codec)[10.5.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_7)[10.5.2Configuration](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Configuration_4)[10.5.3References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_7)
+- [11Connectivity](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Connectivity_2)[11.1Bluetooth](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Bluetooth)[11.1.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_8)[11.1.2Configuration](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Configuration_5)[11.1.3References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_8)[11.2WLAN](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#WLAN)[11.2.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_9)[11.2.2References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_9)[11.3NFC](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#NFC)[11.3.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_10)[11.3.2Configuration](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Configuration_6)[11.3.3References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_10)[11.4MTP](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#MTP)[11.4.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_11)[11.4.2Configuration](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Configuration_7)[11.4.3References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_11)
+- [12Location](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Location_2)[12.1Location Framework](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Location_Framework)[12.1.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_12)[12.2Geofence](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Geofence)[12.3Map Service](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Map_Service)[12.3.1Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_13)[12.3.1.1HERE Maps plugin](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#HERE_Maps_plugin)
+- [13Telephony](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Telephony_2)[13.1Tizen Telephony Architecture](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Tizen_Telephony_Architecture)[13.2Telephony Libraries](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Telephony_Libraries)[13.3Telephony Plugins](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Telephony_Plugins)[13.4Telephony Server](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Telephony_Server)[13.5Porting OAL Interface](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Porting_OAL_Interface_14)[13.5.1Plugin Descriptors](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Plugin_Descriptors)[13.5.2Call Service Operations](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Call_Service_Operations)[13.5.3SMS Service Operations](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#SMS_Service_Operations)[13.5.4Network Service Operations](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Network_Service_Operations)[13.5.5HAL operations](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#HAL_operations)[13.6Configuration](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Configuration_8)[13.7References](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#References_12)[13.8Appendix](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Appendix)[13.8.1Sample Implementation for the Modem Interface Plugin](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Sample_Implementation_for_the_Modem_Interface_Plugin)[13.8.2Sample Implementation for the Modem Plugin](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Sample_Implementation_for_the_Modem_Plugin)[13.8.3Workflow](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Workflow)
+- [14Application](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Application)[14.1Configuration](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Configuration_9)
+- [15Appendix](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Appendix_2)[15.1NFC OAL API](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#NFC_OAL_API)
+
+# Introduction[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=1)]
+
+## About Tizen[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Introduction&action=edit§ion=T-1)]
+
+Tizen is a standards-based platform that provides Web and native APIs for developing [applications](https://wiki.tizen.org/Applications) for multiple [device](https://wiki.tizen.org/index.php?title=Device&action=edit&redlink=1) categories. Tizen is currently targeted for smartphones and tablet devices, though more device types will be available in the future.
+
+## Purpose of This Document[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Introduction&action=edit§ion=T-2)]
+
+The intent of this document is to provide information and instruction to boot Tizen on new hardware and create products based on the Tizen OS. The Tizen porting guide takes you through the porting process by elaborating the Tizen architecture, the necessary tools, and the development environment setup, as well as creating a Tizen Image and demonstrating the modifications needed across various functional areas.
+
+# Tizen Architecture[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=2)]
+
+The following figure illustrates the Tizen architecture for smartphone and tablet devices.
+
+
+
+You can get detailed information of the Tizen framework layer from Dev Guide[[1\]](https://developer.tizen.org/development/getting-started/overview#type)
+
+## The Core Layer[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-1)]
+
+### Tizen Core Services[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-2)]
+
+#### Application Framework[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-3)]
+
+The Application Framework provides application management, including launching other applications using the package name, URI, or MIME type. It also launches predefined services, such as the system dialer application. The Application Framework also notifies applications of common events, such as low memory events, low battery, changes in screen orientation, and push notifications.
+
+#### Base[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-4)]
+
+Base contains [GNU](https://wiki.tizen.org/index.php?title=GNU&action=edit&redlink=1)/[Linux](https://wiki.tizen.org/Linux) * base essential system libraries that provide key features, such as database support, internationalization, and XML parsing.
+
+#### Connectivity[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-5)]
+
+Connectivity consists of all network and connectivity related functionalities, such as 3G, Wi-Fi, Bluetooth, HTTP, and NFC (Near Field Communication). Data network is based on ConnMan (Connection manager), which provides 3G and Wi-Fi based network connection management.
+
+#### Graphics and UI[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-6)]
+
+Graphics and UI consist of the system graphic and UI stacks, which includes EFL (Enlightenment Foundation Libraries), window management system (x11 for Tizen 2.x / wayland for Tizen 3.0), input methods, and OpenGL® ES APIs.
+
+EFL, the heart of the graphics component, is a suite of libraries. EFL is used to create rich graphics with ease, for all UI resolutions. The libraries build UIs in layers, allowing for 3D transformations and more. EFL includes the Evas canvas API library and the elementary widget library.
+
+WebKit-based graphics is provided as well capable of running within a full browser UI or dedicated Web Runtime (without browser window), all based on Tizen's own HTML5 canvas WebKitEFL implementation. WebGL is supported too and Web-based frameworks for UI such as jQuery Mobile are also offered, what may help with porting existing jQuery code.
+
+#### Location[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-7)]
+
+Location provides location based services (LBS), including position information, geocoding, satellite information, and GPS status. It delivers location information from various positioning sources, such as GPS, WPS (Wi-Fi Positioning System), Cell ID, and sensors.
+
+#### Messaging[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-8)]
+
+Messaging consists of Message and Email. The Message supports SMS, MMS, and cell broadcast messages. Email supports protocols such as SMTP, IMAP, and POP3.
+
+#### Multimedia[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-9)]
+
+Multimedia is based on GStreamer. It provides support for media, including video, audio, imaging, and VoIP. It also provides media content management for managing media file metadata information.
+
+#### PIM (Personal Information Management)[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-10)]
+
+PIM enables managing user data on the device, including managing calendar, contacts, tasks, and retrieving data about the device context (such as device position and cable status).
+
+#### Security[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-11)]
+
+Security is responsible for security deployment across the system. It consists of the platform security enablers, such as access control, certificate management, and secure application distribution.
+
+For more information, see [Security/Tizen 3.0 security porting guide](https://wiki.tizen.org/wiki/Security/Tizen_3.0_security_porting_guide) and [All 3.X security pages](https://wiki.tizen.org/wiki/Security#All_3.X_security_pages).
+
+#### System[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-12)]
+
+System consists of service (process), device, and resource management features, including:
+
+- Interfaces for accessing devices, such as sensors, display, or vibrator
+- Power management, such as LCD display backlight dimming/off and application processor sleep
+- Monitoring devices and handling events, such as USB, MMC, charger, and ear jack events
+- Resource management, such as CPU quota control and low memory management
+- Service management, such as watchdog management and capability control
+
+#### Telephony[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-13)]
+
+Telephony consists of cellular functionalities communicating with the modem:
+
+- Provides call services (single call and multiparty call).
+- Provides call-related and non-call-related supplementary services (call waiting, barring, and forwarding and USSD).
+- Supports GSM, UMTS, LTE and CDMA network services.
+- Provides packet services and network status information.
+- Provides SMS-related services.
+- Provides SIM card functionalities (SIM phonebook, SIM EF files, SIM Application Toolkit support)
+
+#### Web[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Tizen_Architecture&action=edit§ion=T-14)]
+
+Web provides a complete implementation of the Tizen Web API optimized for low power devices. It includes WebKit, which is a layout engine designed to allow Web browsers to render Web pages. It also provides Web runtime for Web applications.
+
+# Development Environment Setup[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=3)]
+
+To set up the Tizen OS Development environment and to obtain information regarding development, see the following links:
+
+- [Setup your environment](https://source.tizen.org/documentation/developer-guide/environment-setup)
+- [Installing development tools](https://source.tizen.org/documentation/developer-guide/installing-development-tools)
+
+# Getting the Source Code and Build[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=4)]
+
+Follow this guide to download the full source code for your Tizen platform and kernel.
+
+- **git clone**
+
+1. Download the `xml` file and extract each ``.
+2. Clone each git project using the `git clone ssh://@review.tizen.org:29418/` command.
+
+
+```
+$ wget https://download.tizen.org/releases/weekly/tizen/mobile/tizen-mobile_20160727.5/builddata/manifest/tizen-mobile_20160727.5_arm-wayland.xml
+$ for i in `cat tizen-mobile_20160727.5_arm-wayland.xml | grep "path" | awk -F "\"" '{print $4}'`; do mkdir -p $i; cd $i/..; git clone ssh://@review.tizen.org:29418/$i; cd -; done
+
+```
+
+- **repo init' and 'repo sync**
+
+1. Initialize the repository using the `repo init -u ssh://@review.tizen.org:29418/scm/manifest -b -m .xml` command.
+2. Replace the project's `.xml` file inside the `$workspace/.repo/` directory with the manifest file in the `$srcrpm_snapshot`.
+3. Use the `repo sync` to sync the repository.
+
+
+```
+$ repo init -u ssh://@review.tizen.org:29418/scm/manifest -b tizen -m mobile.xml
+$ wget --directory-prefix=$workspace/.repo/manifests/mobile/ https://download.tizen.org/releases/weekly/tizen/mobile/tizen-mobile_20160727.5/builddata/manifest/tizen-mobile_20160727.5_arm-wayland.xml
+$ mv $workspace/.repo/manifests/mobile/tizen-mobile_20160727.5_arm-wayland.xml projects.xml
+$ repo sync
+
+```
+
+When there is en error in the `repo sync` command, first of all check whether the git project name inside the `projects.xml` file exists in `review.tizen.org`.
+
+For more information, see [Cloning the Tizen source](https://source.tizen.org/documentation/developer-guide/getting-started-guide/cloning-tizen-source).
+
+See the following links for more information:
+
+- Source code Management on Tizen releases:
+
+
+
+
+- Tizen Build setup
+
+
+
+
+- Tizen Bug Tracking system
+
+
+
+
+- Download URL: [http://download.tizen.org/](http://download.tizen.org/)
+
+## Platform Build[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Getting_Source_Code%26Build&action=edit§ion=T-1)]
+
+- To learn how to add something to Tizen, see [Developer Guide](https://source.tizen.org/documentation/developer-guide).
+
+
+- To build the source code by using git build system, see [Git Build System](https://source.tizen.org/documentation/reference/git-build-system).
+
+## Kernel Build[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Getting_Source_Code%26Build&action=edit§ion=T-2)]
+
+To build the Tizen kernel for the TM1 board:
+
+1. Install and setup cross compile tools on your system if the target and host are different (such as x86).
+
+
+
+2. Prepare the kernel source code for TM1 from `profile/mobile/platform/kernel/linux-3.10-sc7730`.`git: https://review.tizen.org/git/?p=profile/mobile/platform/kernel/linux-3.10-sc7730.git``branch: accepted/tizen_mobile`
+
+3. If your kernel source has been used to create binaries for other architecture, start by cleaning them up.
+
+4. Setup the `.config` file for TM1.`$ make ARCH=arm tizen_tm1_defconfig`
+
+5. After reconfiguring your needs (such as `make ARCH=arm menuconfig`) or using the stock configuration (no modifications), build it.`$ make ARCH=arm zImage``$ make ARCH=arm dtbs`
+
+6. Create `devicetree` and `zImage` merged image with image tools.`$ scripts/sprd_dtbtool.sh -o arch/arm/boot/merged-dtb -p scripts/dtc/ -v arch/arm/boot/dts/``$ scripts/sprd_mkdzimage.sh -o arch/arm/boot/dzImage -k arch/arm/boot/zImage -d arch/arm/boot/merged-dtb`
+
+7. Build and make kernel module image as well. Note that you may need to do sudo first to let `sudo -n` work in the script.`$ sudo ls``$ scripts/mkmodimg.sh`
+
+8. Make a `.tar` archive from `dzImage` and `modules.img`.You can make your own `.tar` file from the 2 files.`$ tar cf FILENAME_YOU_WANT.tar -C arch/arm/boot dzImage -C ../../../usr/tmp-mod modules.img`
+
+9. Send the `.tar` image to the target using `lthor`.`$ lthor FILENAME_YOU_WANT.tar`
+
+## Image Build[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Getting_Source_Code%26Build&action=edit§ion=T-3)]
+
+- To create the image by using MIC, see [MIC Image Creator](https://source.tizen.org/documentation/reference/mic-image-creator).
+
+# Tizen Bootup Overview[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=5)]
+
+This section provides a brief overview of the typical booting sequence, starting from the boot loader to the kernel and the platform.
+
+[](https://wiki.tizen.org/File:Boot-1.png)
+
+## Kernel Bootup[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Tizen_Bootup_Overview&action=edit§ion=T-1)]
+
+The Tizen bootup process is the same as any other [Linux](https://wiki.tizen.org/Linux) kernel. You just need to make sure that the correct device tree binary or machine ID and the boot arguments are passed from the boot loader.
+
+## Platform Bootup[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Tizen_Bootup_Overview&action=edit§ion=T-2)]
+
+- If `initramfs` existsAfter the initial RAM disk image has been mounted, `initramfs` hands over the control to `systemd` as the system manager daemon in Tizen platform.
+- If there is no `initramfs`Kernel hands over the control to `systemd` as system manager daemon in Tizen platform.
+
+From this point, `systemd` is responsible for probing all remaining hardware, mounting all necessary file systems and spawning all configured services. Basically, the system boot-up process is split up in various discrete steps. To synchronize point during start-up, target units (files whose name ends in `.target`) are used for grouping units. The boot-up process is highly parallelized in each target so that the order in which specific target units are reached is not deterministic. The system-plugin is an target-specific plugin for configuration setting such as mount point (`/etc/fstab`) and specific target boot scripts.
+
+The following figure shows the early boot sequence after starting the kernel.
+
+[](https://wiki.tizen.org/File:Tizen_3.0_boot2.png)
+
+- `sysinit.target`Special target unit for early boot-up scriptsIt has dependencies on necessary services and targets such as `local-fs.target`.At this point, most of file systems like `/opt` and `/tmp` are mounted and `systemd` related daemons, such as `systemd-journald`, are launched.
+- `basic.target`Special target unit for basic boot-up.At this point, all necessary initialization for general purpose daemons such as mount points, sockets, timers, and path units are completed.Tizen specific services (such as `tizen-system-env`) also are executed.
+
+For more information, see [systemd bootup process](https://www.freedesktop.org/software/systemd/man/bootup.html) and [systemd special target](https://www.freedesktop.org/software/systemd/man/systemd.special.html).
+
+The following figure shows the overview of normal booting sequence in Tizen platform.
+
+[](https://wiki.tizen.org/File:Tizen_3.0_normal_noot.png)
+
+- `multi-user.target`Special target unit for setting up a multi-user system which is non-graphical support.In Tizen platform, this target is used for launching platform infrastructure daemons such as dbus (system session), device manager, resource manager, gps manager, telephony daemon, WRT (Web Runtime) security daemon, media server, tlm, and daemons related to connectivity.Some `systemd`-related daemons (such as `systemd-logind`) are also started in this phase.
+- `graphical.target`Special target unit for setting up a graphical environment.
+- `systemd` user session`systemd` user session is executed by tlm and `systemd-logind` to execute `user@.service`.Tizen platform uses the `systemd` user session for the user privilege daemons.Some daemons related with graphic system such as Enlightenment (Windows manager) are launched as user privilege in this phase.`ac.service` and `launchpad-process-pool` are launched as user privilege.Tizen applications are running as user privilege.
+
+# BSP Customization[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=6)]
+
+This section covers the basic configuration, setup, and build procedure required for building the boot loader and the kernel image for [ARM](https://wiki.tizen.org/ARM).
+
+## Boot Loader Fundamentals[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/BSP_Customization&action=edit§ion=T-1)]
+
+Boot loader is a small piece of software that is required to perform the basic hardware and peripheral initialization and load the kernel and proper device tree binary for the device to RAM. For the Tizen platform, the boot loader comes in 2 parts. The first part is the primary boot loader and the second part is the secondary boot loader. The primary boot loader is the proprietary boot loader. The secondary boot loader is the open source boot loader u-boot, which is customized further for the Tizen platform.
+
+If your platform is already loaded with the compatible boot loader software, you can skip this section and move directly to the kernel section.
+
+## Boot Loader Setup and Build[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/BSP_Customization&action=edit§ion=T-2)]
+
+To build the Tizen TM1 boot loader:
+
+1. Install and setup cross compile tools on your system if the target and your host are different (such as x86).
+2. Start with cleaning up the `u-boot-tm1` source. (Download the source from the [u-boot-tm1](https://review.tizen.org/git/?p=profile/mobile/platform/kernel/u-boot-tm1.git;a=summary) repository.)`$ make distclean`
+3. Set up the configration for TM1.
+4. Build `u-boot`.`$ make ARCH=arm`
+5. Once the build is successful, the `u-boot.bin` file is created. (This step is for preventing from flashing the other `u-boot.bin` file.)`$ tools/mkimage_signed.sh u-boot.bin "tizen_tm1"`
+6. After the scrip is run, the `u-boot-mmc.bin` file is created.
+7. Create a boot loader tarball to download the `u-boot` binary onto the target.`$ tar cvf bootloader.tar u-boot-mmc.bin`
+
+Be careful when you modify the boot loader, as there is a risk of breaking the device for good.
+
+## Boot Loader Kernel Parameters[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/BSP_Customization&action=edit§ion=T-3)]
+
+The command line parameters can be passed from boot loader to [Linux](https://wiki.tizen.org/Linux) kernel. Here are some example command line parameters:
+
+```
+ Example:
+ console=ttyS1,115200n8
+ mem=1024M
+ loglevel=1
+
+```
+
+# Kernel Fundamentals[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=7)]
+
+The kernel is the operating system that drives the platform. Here the kernel refers to the open source [Linux](https://wiki.tizen.org/Linux) kernel that is customized for the Tizen platform. The following section gives a brief overview about the Tizen kernel setup, configuration, and the build procedure for building a Linux kernel for your Tizen platform. The output of the kernel binary is a `zImage` merged with `devicetree` or the `zImage` and `devicetree` binary that is suitable for boot loader of the specific board. If you have chosen for a secure booting configuration in your boot loader, this kernel image must be compatible with your boot loader.
+
+To download the Tizen kernel source package, see [Getting Source Code and Build](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Getting_Source_Code.26Build). Set up or modify your kernel configuration, use the appropriate `defconfig` file from `arch/arm/configs/` ([ARM](https://wiki.tizen.org/ARM) CPU).
+
+For more detailed information about Tizen kernel configuration and kernel building, see [Kernel Build](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Kernel_Build).
+
+| Note |
+| ---------------------------------------- |
+| Tizen uses `INOTIFY` instead of `DNOTIFY`. You must disable `DNOTIFY` from your kernel configuration. |
+
+If you want to use `initramfs`, you can use these configurations:
+
+- `CONFIG_INITRAMFS_SOURCE`
+- `CONFIG_INITRAMFS_ROOT_UID`
+- `CONFIG_INITRAMFS_ROOT_GID`
+- `CONFIG_INITRAMFS_COMPRESSION_NONE/GZIP/BZIP2/LZNA/LZO`
+
+# System[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=8)]
+
+## Partition and Filesystem[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-1)]
+
+### Tizen Partition Layout[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-2)]
+
+The following description is an example of the Tizen partition layout. The product vendor can modify the sequence or partition layout for their devices as needed.
+
+1. The `boot` partition includes the kernel image, boot-loader image, and modem image. Additionally, it can contain device driver modules.
+2. The `rootfs` partition is mounted on the root directory. It contains fundamental frameworks for Tizen and some general utilities for Linux.
+3. The `system-data` partition is mounted on the `/opt` directory and it includes the platform database and platform configurations.
+4. The `user` partition can be mounted on the `/opt/usr` directory separately. The partition includes applications and data installed by user.
+5. External storage are mounted on `/opt/media`.
+6. The image files (`rootfs.img`, `system-data.img`, and `user.img`) can be zipped for downloading, such as `.tar.gz`.
+
+According to the partition layout, the `/etc/fstab` directory must be modified or the `systemd` mount units must be added properly. For the purpose, the `fstab` file or specific system mount unit files for the device must be added in the `system-plugin` git. The following example shows the `fstab` file.
+
+```
+/dev/root / ext4 defaults,noatime 0 1
+LABEL=system-data /opt ext4 defaults,noatime 0 2
+LABEL=user /opt/usr ext4 defaults,noatime 0 3
+
+```
+
+### Supported Filesystems in Tizen[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-3)]
+
+Filesystems that Tizen supports Extended 4 (Ext 4) file-system, which is configured as the default file-system. The Tizen kernel has to be compiled to enable support for the other file systems like JFS, XFS, BTRFS, and Reiserfs. The following configuration option must be enabled in the kernel configuration file.
+
+- `CONFIG_EXT4_FS=y`
+- `CONFIG_EXT4_FS_XATTR=y`
+- `CONFIG_EXT4_USE_FOR_EXT23=y`
+- `CONFIG_EXT4_FS_SECURITY=y`
+
+### File-system Hierarchy Standard in Tizen[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-4)]
+
+The Tizen directory hierarchy intends to follow the FHS as possible for compatibility as a member of Linux world. However, Tizen uses the `/opt` directory for Tizen specific purposes Tizen recommends that whole RW data places to the `/opt` directory.
+
+[](https://wiki.tizen.org/File:FSH.png)
+
+Directory macros are provided for accessing Tizen specific directory by Tizen Platform Configuration Metafile. The following table lists the example macros.
+
+| Directory macros | Real path |
+| ---------------- | ------------ |
+| `TZ_SYS_DATA` | `/opt/data` |
+| `TZ_SYS_SHARE` | `/opt/share` |
+| `TZ_SYS_VAR` | `/opt/var` |
+
+## System Framework[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-5)]
+
+The System framework module abstracts low level system functions and manages the Tizen system.
+
+- `systemd` requirements for system and service managementLinux Kernel >= 3.4 , Linux Kernel >= 3.8 for Smack support`CONFIG_CGROUPS`, `CONFIG_TIMERFD`, `CONFIG_SIGNALFD`, `CONFIG_EPOLL`, ...
+- Basic resource requirements (such as cpu, memory) usage management
+ - Linux Kernel >= 3.10 for `VMPRESSURE`, Linux Kernel >= 3.8 for `MEMCG SWAP`
+ - `CONFIG_CGROUPS`, `CONFIG_CGROUP_SCHED`, `CONFIG_MEMCG`, `CONFIG_MEMCG_SWAP`, ...
+- `deviced` requirements for device and power managementDevice HAL layer porting
+- dlog requirements
+ - Selecting a proper backend for target environment and enable appropriate kernel feature
+ 1. Additional KMSG Patch for Multiple Kmsg Backend
+ 2. Android Logger Driver for Android Log Backend
+ 3. User Space Logger Dameon
+
+It is recommended to use Linux Kernel 3.10 or above.
+
+[](https://wiki.tizen.org/File:SystemFW.png)
+
+#### systemd[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-6)]
+
+[systemd](https://wiki.tizen.org/index.php?title=Systemd&action=edit&redlink=1) (ver.219), is system and service manager for Tizen system. Basically, `systemd` provides a lot of functionality such as parallesized service execution, socket and D-Bus activation for starting services and daemon, on-demand starting of deamons, managing the service processes as a group using Linux cgroup, supporting automount points, snapshotting and restoring of services.
+
+The core of `systemd` manages all units, such as service, socket, and mount. It stores all log data. When developers add a new service daemon, they need to provide proper system units and unit dependency.
+
+`systemd` requires to enable the `cgroup` and `autofs` options in the [Linux](https://wiki.tizen.org/Linux) Kernel configuration. It also depends on dbus and some libraries.
+
+#### resourced[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-7)]
+
+`resourced` is a daemon managing system resources such as memory and cpu.
+
+- To use most of the resourced functionality, you have to enable kernel feature about cgroup
+ - `CONFIG_CGROUPS`: Base feature
+ - `CONFIG_CGROUP_SCHED`: Controls the CPU share of applications
+ - `CONFIG_MEMCG`: Selects the victim in the low memory situation
+ - `CONFIG_FREEZER`: Freezes background (and idle) applications
+ - `CONFIG_MEMCG_SWAP`, `CONFIG_MEMCG_SWAP_ENABLED`, `CONFIG_ZRAM`, `CONFIG_ZSMALLOC`: Saves memory by compressing
+
+| Note |
+| ---------------------------------------- |
+| For using resourced freezer feature, you need to install the freezer plugin by enabling `CONFIG_FREEZER`. |
+
+#### deviced[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-8)]
+
+The `deviced` is a daemon which handles the device events, such as the battery level and plug and play device status and provides the interfaces to manage devices such as power, display, and external storages. Each functionality may require HAL layer if your BSP does not provide the Linux kernel standard interface.
+
+- Managing the LCD backlight state (on/off/dim)
+- Managing the CPU sleep state and handling the requests lock CPU not to sleep
+- Monitoring the external devices, such as USB cable, earjack, and charger
+- Monitoring the battery level
+- Managing the external storages, such as SD card and USB storages
+- Playing and handling the vibrator
+- Setting USB configurations to connect to the host PC
+- Powering off the LED, IR, and other features
+- Using the device HAL to handle devices and get events
+
+#### dlog[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-9)]
+
+Tizen provides 3 backends for logging system:
+
+- Multiple `kmsg` backend
+
+
+
+
+- Android-logger backend
+
+
+
+
+- User logger backend
+
+
+
+### Porting Smart Development Bridge (SDB)[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-10)]
+
+SDB is a device management tool used for remote shell command, file transfer, controlling device log out, and USB debugging.
+
+- Kernel driver is necessary to use sdb. The following are examples of the kernel drivers:
+
+
+
+
+- The USB interface descriptor of SDB interface on the target device must have the following information to recognize the target as a kind of Tizen device.
+
+```
+Class: 0xff
+SubClass: 0x20
+Protocol: 0x02
+
+```
+
+- If multi-configuration is used, the SDB client of the host PC (Linux PC) selects the first configuration. SDB must be located on the first configuration on the target with multi-configuration system.
+
+
+- External Connector Class (`extcon`) needs to be ported to the kernel to recognize the USB cable connection. If `extcon` cannot be ported, the following shell command can be used to enable SDB.
+
+```
+/usr/bin/direct_set_debug.sh --sdb-set
+```
+
+### Porting Device HAL Interface[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-11)]
+
+The device HAL is applied for the hardware independent platform. The device HAL consists of libraries corresponding to hardware, such as display, external connector, battery, LED, and IR. The HAL is used by `deviced` to control hardware and manages the events of device state changes. `deviced` (device daemon) opens the implemented libraries and uses the APIs to control the devices.
+
+OEM developers must implement the API defined in the header files of the `libdevice-node` package and compile their libraries (`.so` file) for their devices.
+
+The following code snippet shows the device HAL structure.
+
+```
+#define MAKE_TAG_CONSTANT(A,B,C,D) (((A) << 24) | ((B) << 16) | ((C) << 8) | (D))
+#define HARDWARE_INFO_TAG MAKE_TAG_CONSTANT('T','H','I','T')
+
+struct hw_common;
+struct hw_info {
+ /* magic must be initialized to HARDWARE_INFO_TAG */
+ uint32_t magic;
+ /* HAL version */
+ uint16_t hal_version;
+ /* Device version */
+ uint16_t device_version;
+ /* Device ID */
+ const char *id;
+ /* Device name */
+ const char *name;
+ /* Author name */
+ const char *author;
+ /* Module's dynamic shared object */
+ void *dso;
+ /* Reserved for future use */
+ uint32_t reserved[8];
+ /* Open device */
+ int (*open)(struct hw_info *info, const char *id, struct hw_common **common);
+ /* Close device */
+ int (*close)(struct hw_common *common);
+};
+
+struct hw_common {
+ /* Indicate to this device information structure */
+ struct hw_info *info;
+};
+
+```
+
+#### Battery HAL[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-12)]
+
+The battery HAL provides functions to get the battery status. The HAL interface is defined in the `hw/battery.h` header file of the `libdevice-node` library, and the `pkg-config` `device-node` must be used to use the HAL interface.
+
+The following code snippet shows the battery HAL interface.
+
+```
+/*
+ Device ID
+*/
+#define BATTERY_HARDWARE_DEVICE_ID "battery"
+
+#define POWER_SOURCE_NONE "none"
+#define POWER_SOURCE_AC "ac"
+#define POWER_SOURCE_USB "usb"
+#define POWER_SOURCE_WIRELESS "wireless"
+
+/*
+ Device version
+*/
+#define BATTERY_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,1)
+
+struct battery_info {
+ char *name; /* "display" */
+ char *status; /* "Charging", "Discharging", "Full", "Not charging" */
+ char *health; /* "Good", "Cold", "Dead", "Overheat", "Over voltage" */
+ char *power_source; /* "ac", "usb", "wireless" */
+ int online; /* 0 ~ */
+ int present; /* 0 or 1 */
+ int capacity; /* 0 ~ 100 */
+ int current_now; /* Current (uA). Positive value if power source is connected, negative value if power source is not connected */
+ int current_average; /* Average curretn (uA). Positive value if power source is connected, negative value if power source is not connected */
+};
+
+typedef void (*BatteryUpdated)(struct battery_info *info, void *data);
+
+struct battery_device {
+ struct hw_common common;
+
+ /* Register battery event */
+ int (*register_changed_event)(BatteryUpdated updated_cb, void *data);
+ void (*unregister_changed_event)(BatteryUpdated updated_cb);
+
+ /* Get current states */
+ int (*get_current_state)(BatteryUpdated updated_cb, void *data);
+};
+
+```
+
+The following table lists the battery HAL functions.
+
+| Function prototype | Description | |
+| ---------------------------------------- | ---------------------------------------- | --------- |
+| `int (*register_changed_event)(BatteryUpdated updated_cb, void *data);` | The function adds callback function which is called when battery status is changed. | Mandatory |
+| `void (*unregister_changed_event)(BatteryUpdated updated_cb);` | The function removes the callback function added for the battery status event. | Mandatory |
+| `int (*get_current_state)(BatteryUpdated updated_cb, void *data);` | The function calls the function provided as the first parameter. The battery information is delivered to the function parameter. | Mandatory |
+
+The following code snippet shows an example of the battery HAL.
+
+```
+#define BATTERY_ROOT_PATH "/sys/class/power_supply"
+
+static int
+get_power_source(char **src)
+{
+ int ret, val;
+ ret = sys_get_int(BATTERY_ROOT_PATH"/"POWER_SOURCE_AC"/online", &val);
+ if (ret >= 0 && val > 0) {
+ *src = POWER_SOURCE_AC;
+
+ return 0;
+ }
+
+ ret = sys_get_int(BATTERY_ROOT_PATH"/"POWER_SOURCE_USB"/online", &val);
+ if (ret >= 0 && val > 0) {
+ *src = POWER_SOURCE_USB;
+
+ return 0;
+ }
+
+ ret = sys_get_int(BATTERY_ROOT_PATH"/"POWER_SOURCE_WIRELESS"/online", &val);
+ if (ret >= 0 && val > 0) {
+ *src = POWER_SOURCE_WIRELESS;
+
+ return 0;
+ }
+
+ *src = POWER_SOURCE_NONE;
+
+ return 0;
+}
+
+static int
+battery_get_current_state(BatteryUpdated updated_cb, void *data)
+{
+ int fd;
+ struct battery_info info;
+ char status[32];
+ char health[32];
+ char *power_source;
+
+ if (!updated_cb)
+ return -EINVAL;
+
+ info.name = BATTERY_HARDWARE_DEVICE_ID;
+
+
+ fd = open(BATTERY_ROOT_PATH"/battery/status", O_RDONLY);
+ read(fd, status, sizeof(status));
+ close(fd);
+ info.status = status;
+
+ fd = open(BATTERY_ROOT_PATH"/battery/health", O_RDONLY);
+ read(fd, health, sizeof(health));
+ close(fd);
+ info.health = health;
+
+ ....
+
+ get_power_source(&power_source);
+ info.power_source = power_source;
+
+ updated_cb(&info, data);
+
+ return 0;
+}
+
+static int
+battery_open(struct hw_info *info, const char *id, struct hw_common **common)
+{
+ struct battery_device *battery_dev;
+ battery_dev = calloc(1, sizeof(struct battery_device));
+
+ battery_dev->common.info = info;
+ battery_dev->register_changed_event = battery_register_changed_event;
+ battery_dev->unregister_changed_event = battery_unregister_changed_event;
+ battery_dev->get_current_state = battery_get_current_state;
+
+ *common = (struct hw_common *)battery_dev;
+
+ return 0;
+}
+
+static int
+battery_close(struct hw_common *common)
+{
+ free(common);
+
+ return 0;
+}
+
+HARDWARE_MODULE_STRUCTURE = {
+ .magic = HARDWARE_INFO_TAG,
+ .hal_version = HARDWARE_INFO_VERSION,
+ .device_version = BATTERY_HARDWARE_DEVICE_VERSION,
+ .id = BATTERY_HARDWARE_DEVICE_ID,
+ .name = "battery",
+ .open = battery_open,
+ .close = battery_close,
+};
+
+```
+
+#### Display HAL[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-13)]
+
+The display HAL provides functions to control the display brightness. The HAL interface is defined in the `hw/display.h` header file of the `libdevice-node` library, and the `pkg-config` `device-node` must be used to use the HAL interface.
+
+The following code snippet shows the display HAL interface.
+
+```
+/*
+ Device ID
+*/
+#define DISPLAY_HARDWARE_DEVICE_ID "display"
+
+/*
+ Device version
+*/
+#define DISPLAY_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,2)
+
+struct display_device {
+ struct hw_common common;
+
+ /* Control display brightness */
+ int (*get_max_brightness)(int *brightness);
+ int (*get_brightness)(int *brightness);
+ int (*set_brightness)(int brightness);
+};
+
+```
+
+The following table lists the display HAL functions.
+
+| Function prototype | Description | |
+| ---------------------------------------- | ---------------------------------------- | --------- |
+| `int (*get_max_brightness)(int *brightness)` | The function returns the maximum brightness value the display driver supports. | Mandatory |
+| `int (*get_brightness)(int *brightness)` | The function returns the current brightness value. | Mandatory |
+| `int (*set_brightness)(int brightness)` | The function sets the brightness value. | Mandatory |
+
+The following code snippet shows an example of the display HAL.
+
+```
+#ifndef BACKLIGHT_PATH
+#define BACKLIGHT_PATH "/sys/class/backlight/panel"
+#endif
+
+static int
+display_get_max_brightness(int *val)
+{
+ static int max = -1;
+ char buf[BUF_MAX];
+ int fd;
+ if (max < 0) {
+ fd = open(BACKLIGHT_PATH"/max_brightness", O_RDONLY);
+ read(fd, buf, sizeof(buf));
+ close(fd);
+ max = atoi(buf);
+ }
+ *val = max;
+
+ return 0;
+}
+
+static int
+display_get_brightness(int *brightness)
+{
+ int fd;
+ char buf[BUF_MAX];
+ fd = open(BACKLIGHT_PATH"/brightness", O_RDONLY);
+ read(fd, buf, sizeof(buf));
+ close(fd);
+ *brightness = atoi(buf);
+
+ return 0;
+}
+
+static int
+display_set_brightness(int brightness)
+{
+ int max;
+ char buf[BUF_MAX];
+ display_get_max_brightness(&max);
+ if (brightness > max)
+ brightness = max;
+ snprintf(buf, sizeof(buf), "%d", brightness);
+ fd = open(BACKLIGHT_PATH"/brightness", O_WRONLY);
+ write(fd, buf, strlen(buf));
+ close(fd);
+
+ return 0;
+}
+
+static int
+display_open(struct hw_info *info,
+ const char *id, struct hw_common **common)
+{
+ struct display_device *display_dev;
+
+ if (!info || !common)
+ return -EINVAL;
+
+ display_dev = calloc(1, sizeof(struct display_device));
+ if (!display_dev)
+ return -ENOMEM;
+
+ display_dev->common.info = info;
+ display_dev->get_max_brightness = display_get_max_brightness;
+ display_dev->get_brightness = display_get_brightness;
+ display_dev->set_brightness = display_set_brightness;
+
+ *common = (struct hw_common *)display_dev;
+
+ return 0;
+}
+
+static int
+display_close(struct hw_common *common)
+{
+ if (!common)
+ return -EINVAL;
+
+ free(common);
+
+ return 0;
+}
+
+HARDWARE_MODULE_STRUCTURE = {
+ .magic = HARDWARE_INFO_TAG,
+ .hal_version = HARDWARE_INFO_VERSION,
+ .device_version = DISPLAY_HARDWARE_DEVICE_VERSION,
+ .id = DISPLAY_HARDWARE_DEVICE_ID,
+ .name = "Display",
+ .open = display_open,
+ .close = display_close,
+};
+
+```
+
+#### External Connector HAL[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-14)]
+
+The external connector HAL provides functions to get the external connector device status. The HAL interface is defined in the `hw/external_connection.h` header file of the `libdevice-node` library, and the `pkg-config` `device-node` needs to be used to use the HAL interface.
+
+The following code snippet shows the interface of the external connector HAL.
+
+```
+/*
+ Device ID
+*/
+#define EXTERNAL_CONNECTION_HARDWARE_DEVICE_ID "external_connection"
+
+#define EXTERNAL_CONNECTION_USB "USB"
+#define EXTERNAL_CONNECTION_USB_HOST "USB-HOST"
+#define EXTERNAL_CONNECTION_TA "TA"
+#define EXTERNAL_CONNECTION_HDMI "HDMI"
+#define EXTERNAL_CONNECTION_DOCK "Dock"
+#define EXTERNAL_CONNECTION_MIC "Microphone"
+#define EXTERNAL_CONNECTION_HEADPHONE "Headphone"
+
+/*
+ Device version
+*/
+#define EXTERNAL_CONNECTION_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,1)
+
+struct connection_info {
+ char *name;
+ char *state;
+ int flags;
+};
+
+typedef void (*ConnectionUpdated)(struct connection_info *info, void *data);
+
+struct external_connection_device {
+ struct hw_common common;
+
+ /* Register external_connection event */
+ int (*register_changed_event)(ConnectionUpdated updated_cb, void *data);
+ void (*unregister_changed_event)(ConnectionUpdated updated_cb);
+
+ /* Get current states */
+ int (*get_current_state)(ConnectionUpdated updated_cb, void *data);
+};
+
+```
+
+The following table lists the external connector HAL functions.
+
+| Function prototype | Description | |
+| ---------------------------------------- | ---------------------------------------- | --------- |
+| `int (*register_changed_event)(ConnectionUpdated updated_cb, void *data);` | The function adds callback function which is called when the external connector status is changed. | Mandatory |
+| `void (*unregister_changed_event)(ConnectionUpdated updated_cb);` | The function removes the callback function added for the external connector status event. | Mandatory |
+| `int (*get_current_state)(ConnectionUpdated updated_cb, void *data);` | The function calls the function provided as the first parameter. The external connector information is delivered to the function parameter. | Mandatory |
+
+The following code snippet shows an example of the external connector HAL.
+
+```
+#define SWITCH_ROOT_PATH "/sys/devices/virtual/switch"
+
+static struct switch_device {
+ char *type;
+ char *name;
+ int state;
+} switch_devices[] = {
+ {EXTERNAL_CONNECTION_USB, "usb_cable", 0},
+ {EXTERNAL_CONNECTION_DOCK, "dock", 0},
+ {EXTERNAL_CONNECTION_HEADPHONE, "earjack", 0},
+};
+
+static int
+read_switch_state(char *path)
+{
+ char node[128], val[8];
+ FILE *fp;
+
+ snprintf(node, sizeof(node), "%s/%s/state", SWITCH_ROOT_PATH, path);
+ fp = fopen(node, "r");
+ fgets(val, sizeof(val), fp));
+ fclose(fp);
+
+ return atoi(val);
+}
+
+static int
+external_connection_get_current_state(ConnectionUpdated updated_cb, void *data)
+{
+ int ret, i;
+ struct connection_info info;
+ char buf[8];
+
+ for (i = 0 ; i < ARRAY_SIZE(switch_devices) ; i++) {
+ ret = read_switch_state(switch_devices[i].name);
+ info.name = switch_devices[i].type;
+ snprintf(buf, sizeof(buf), "%d", ret);
+ info.state = buf;
+ updated_cb(&info, data);
+ }
+
+ return 0;
+}
+
+static int
+read_switch_state(char *path)
+{
+ char node[128], val[8];
+ FILE *fp;
+
+ snprintf(node, sizeof(node), "%s/%s/state", SWITCH_ROOT_PATH, path);
+ fp = fopen(node, "r");
+ fgets(val, sizeof(val), fp));
+ fclose(fp);
+
+ return atoi(val);
+}
+
+static int
+external_connection_close(struct hw_common *common)
+{
+ free(common);
+
+ return 0;
+}
+
+HARDWARE_MODULE_STRUCTURE = {
+ .magic = HARDWARE_INFO_TAG,
+ .hal_version = HARDWARE_INFO_VERSION,
+ .device_version = EXTERNAL_CONNECTION_HARDWARE_DEVICE_VERSION,
+ .id = EXTERNAL_CONNECTION_HARDWARE_DEVICE_ID,
+ .name = "external_connection",
+ .open = external_connection_open,
+ .close = external_connection_close,
+};
+
+```
+
+#### LED HAL[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-15)]
+
+The LED HAL provides functions to control LED lights. The HAL interface is defined in the `hw/led.h` header file of the `libdevice-node` library, and the `pkg-config` `device-node` must be used to use the HAL interface.
+
+The following example shows the interface of the LED HAL.
+
+```
+/*
+ Device ID
+*/
+#define LED_HARDWARE_DEVICE_ID "led"
+
+/*
+ Device version
+*/
+#define LED_HARDWARE_DEVICE_VERSION MAKE_VERSION(1,0)
+
+/*
+ LED device ID
+*/
+#define LED_ID_CAMERA_BACK "camera_back"
+#define LED_ID_CAMERA_FRONT "camera_front"
+#define LED_ID_NOTIFICATION "notification"
+#define LED_ID_TOUCH_KEY "touch_key"
+
+enum led_type {
+ LED_TYPE_MANUAL,
+ LED_TYPE_BLINK,
+};
+
+struct led_state {
+ /* LED type */
+ enum led_type type;
+ /*
+ The first byte means opaque and the other 3 bytes are RGB values.
+ You can use opaque byte as a led brightness value.
+ If the first byte is 0x00, led is switched off.
+ Anything else is worked as on. The max value is 0xFF.
+ */
+ unsigned int color;
+ /* Turn on time in milliseconds */
+ int duty_on;
+ /* Turn off time in milliseconds */
+ int duty_off;
+};
+
+struct led_device {
+ struct hw_common common;
+
+ int (*set_state)(struct led_state *state);
+};
+
+```
+
+The following table lists the LED HAL functions.
+
+| Function prototype | Description | |
+| ---------------------------------------- | ---------------------------------------- | --------- |
+| `int (*set_state)(struct led_state *state);` | The function sets LED play style and plays LED lights. | Mandatory |
+
+The following code snippet shows an example of the LED HAL.
+
+```
+#ifndef CAMERA_BACK_PATH
+#define CAMERA_BACK_PATH "/sys/class/leds/torch-sec1"
+#endif
+
+static int
+camera_back_set_state(struct led_state *state)
+{
+ static int max = -1;
+ int brt;
+ char buf[BUF_MAX];
+ int fd;
+
+ if (state->type == LED_TYPE_BLINK) {
+ printf("camera back led does not support LED_TYPE_BLINK mode");
+
+ return -ENOTSUP;
+ }
+
+ if (max < 0) {
+ fd = open(CAMERA_BACK_PATH"/max_brightness", O_RDONLY);
+ read(fd, buf, sizeof(buf));
+ close(fd);
+ max = atoi(buf);
+ }
+
+ brt = (state->color >> 24) & 0xFF;
+ brt = brt / 255.f * max;
+
+ snprintf(buf, sizeof(buf), "%d", brt);
+ fd = open(CAMERA_BACK_PATH"/brightness", O_WRONLY);
+ write(fd, buf, strlen(buf));
+ close(fd);
+
+ return 0;
+}
+
+struct led_device camera_back_dev = {
+ .set_state = camera_back_set_state,
+};
+
+struct led_device_list {
+ const char *id;
+ struct led_device *operations;
+ struct led_device *dev;
+} led_list[] = {
+ {LED_ID_CAMERA_BACK, &camera_back_dev, NULL},
+ {LED_ID_CAMERA_FRONT, NULL, NULL},
+ {LED_ID_NOTIFICATION, NULL, NULL},
+ {LED_ID_TOUCH_KEY, NULL, NULL},
+};
+
+static int
+led_open(struct hw_info *info, const char *id, struct hw_common **common)
+{
+ int i, list_len, id_len;
+
+ list_len = ARRAY_SIZE(led_list);
+ id_len = strlen(id) + 1;
+ for (i = 0 ; i < list_len ; i++) {
+ if (strncmp(id, led_list[i].id, id_len))
+ continue;
+ if (!led_list[i].operations)
+ return -ENOTSUP;
+ if (led_list[i].dev)
+ goto out;
+ break;
+ }
+
+ if (i >= list_len)
+ return -EINVAL;
+ led_list[i].dev = calloc(1, sizeof(struct led_device));
+
+ led_list[i].dev->common.info = info;
+ led_list[i].dev->set_state
+ = led_list[i].operations->set_state;
+
+out:
+ *common = (struct hw_common *)led_list[i].dev;
+
+ return 0;
+}
+
+static int
+led_close(struct hw_common *common)
+{
+ free(common);
+
+ return 0;
+}
+
+HARDWARE_MODULE_STRUCTURE = {
+ .magic = HARDWARE_INFO_TAG,
+ .hal_version = HARDWARE_INFO_VERSION,
+ .device_version = LED_HARDWARE_DEVICE_VERSION,
+ .id = LED_HARDWARE_DEVICE_ID,
+ .name = "Default LED",
+ .open = led_open,
+ .close = led_close,
+};
+
+```
+
+#### IR HAL[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-16)]
+
+The IR HAL provides functions to control IR transmission. The HAL interface is defined in the `hw/ir.h` header file of the `libdevice-node` library, and the `pkg-config` `device-node` must be used to use the HAL interface.
+
+The following example shows the interface of the IR HAL.
+
+```
+/*
+ Device ID
+*/
+#define IR_HARDWARE_DEVICE_ID "ir"
+
+/*
+ Device version
+*/
+#define IR_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,1)
+
+struct ir_device {
+ struct hw_common common;
+
+ /* Control the IR state */
+ int (*is_available)(bool *available);
+ int (*transmit)(int *frequency_pattern, int size);
+};
+
+```
+
+The following table lists the IR HAL functions.
+
+| Function prototype | Description | |
+| ---------------------------------------- | ---------------------------------------- | --------- |
+| `int (*is_available)(bool *available);` | The function returns whether the target device supports IR transmission. | Mandatory |
+| `int (*transmit)(int *frequency_pattern, int size);` | The function transmits IR with frequency pattern and its size. | Mandatory |
+
+The following code snippet shows an example of the IR HAL.
+
+```
+#define IRLED_CONTROL_PATH "/sys/class/ir/ir_send"
+
+static int
+ir_is_available(bool *available)
+{
+ *available = true;
+
+ return 0;
+}
+
+static int
+ir_transmit(int *frequency_pattern, int size)
+{
+ int i, ret;
+
+ for (i = 0; i < size; i++) {
+ snprintf(buf, sizeof(buf), "%d", frequency_pattern[i]);
+ fd = open(IRLED_CONTROL_PATH, O_WRONLY);
+ write(fd, buf, strlen(buf));
+ close(fd);
+ }
+
+ return 0;
+}
+
+static int
+ir_open(struct hw_info *info, const char *id, struct hw_common **common)
+{
+ struct ir_device *ir_dev;
+
+ ir_dev = calloc(1, sizeof(struct ir_device));
+
+ ir_dev->common.info = info;
+ ir_dev->is_available = ir_is_available;
+ ir_dev->transmit = ir_transmit;
+
+ *common = (struct hw_common *)ir_dev;
+
+ return 0;
+}
+
+static int
+ir_close(struct hw_common *common)
+{
+ free(common);
+
+ return 0;
+}
+
+HARDWARE_MODULE_STRUCTURE = {
+ .magic = HARDWARE_INFO_TAG,
+ .hal_version = HARDWARE_INFO_VERSION,
+ .device_version = IR_HARDWARE_DEVICE_VERSION,
+ .id = IR_HARDWARE_DEVICE_ID,
+ .name = "ir",
+ .open = ir_open,
+ .close = ir_close,
+};
+
+```
+
+#### Touchscreen HAL[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/System&action=edit§ion=T-17)]
+
+The touchscreen HAL provides functions to on/off touchscreen. The HAL interface is defined in the `hw/touchscreenf.h` header file of the `libdevice-node` library, and the `pkg-config` `device-node` must be used to use the HAL interface.
+
+The following example shows the interface of the touchscreen HAL.
+
+```
+/*
+ Device ID
+*/
+#define TOUCHSCREEN_HARDWARE_DEVICE_ID "touchscreen"
+
+/*
+ Device version
+*/
+#define TOUCHSCREEN_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,1)
+
+enum touchscreen_state {
+ TOUCHSCREEN_OFF, /* Disable touchscreen */
+ TOUCHSCREEN_ON, /* Enable touchscreen */
+};
+
+struct touchscreen_device {
+ struct hw_common common;
+
+ /* Control touchscreen state */
+ int (*get_state)(enum touchscreen_state *state);
+ int (*set_state)(enum touchscreen_state state);
+};
+
+```
+
+The following table lists the touchscreen HAL functions.
+
+| Function prototype | Description | |
+| ---------------------------------------- | ---------------------------------------- | --------- |
+| `int (*get_state)(enum touchscreen_state *state);` | The function returns whether the touchscreen is enabled. | Mandatory |
+| `int (*set_state)(enum touchscreen_state state);` | The function enables and disables the touchscreen. | Mandatory |
+
+The following code snippet shows an example of the touchscreen HAL.
+
+```
+#define TURNON_TOUCHSCREEN 1
+#define TURNOFF_TOUCHSCREEN 0
+#define TOUCHSCREEN_PATH "/sys/class/input/touchscreen/enable"
+
+static int
+touchscreen_get_state(enum touchscreen_state *state)
+{
+ int val;
+ int fd;
+ char buf[BUF_MAX];
+
+ fd = open(TOUCHSCREEN_PATH, O_RDONLY);
+ read(fd, buf, sizeof(buf));
+ close(fd);
+ val = atoi(buf);
+
+ switch (val) {
+ case TURNOFF_TOUCHSCREEN:
+ *state = TOUCHSCREEN_OFF;
+ break;
+ case TURNON_TOUCHSCREEN:
+ *state = TOUCHSCREEN_ON;
+ break;
+ default:
+ return -EINVAL;
+ }
+
+ return 0;
+}
+
+static int
+touchscreen_set_state(enum touchscreen_state state)
+{
+ int val;
+ char buf[BUF_MAX];
+
+ switch (state) {
+ case TOUCHSCREEN_OFF:
+ val = TURNOFF_TOUCHSCREEN;
+ break;
+ case TOUCHSCREEN_ON:
+ val = TURNON_TOUCHSCREEN;
+ break;
+ default:
+ return -EINVAL;
+ }
+
+ snprintf(buf, sizeof(buf), "%d", val);
+ fd = open(TOUCHSCREEN_PATH, O_WRONLY);
+ write(fd, buf, strlen(buf));
+ close(fd);
+
+ return ret;
+}
+
+static int
+touchscreen_open(struct hw_info *info, const char *id, struct hw_common **common)
+{
+ struct touchscreen_device *touchscreen_dev;
+
+ touchscreen_dev = calloc(1, sizeof(struct touchscreen_device));
+
+ touchscreen_dev->common.info = info;
+ touchscreen_dev->get_state = touchscreen_get_state;
+ touchscreen_dev->set_state = touchscreen_set_state;
+
+ *common = (struct hw_common *)touchscreen_dev;
+
+ return 0;
+}
+
+static int
+touchscreen_close(struct hw_common *common)
+{
+ free(common);
+
+ return 0;
+}
+
+HARDWARE_MODULE_STRUCTURE = {
+ .magic = HARDWARE_INFO_TAG,
+ .hal_version = HARDWARE_INFO_VERSION,
+ .device_version = TOUCHSCREEN_HARDWARE_DEVICE_VERSION,
+ .id = TOUCHSCREEN_HARDWARE_DEVICE_ID,
+ .name = "touchscreen",
+ .open = touchscreen_open,
+ .close = touchscreen_close,
+};
+
+```
+
+## Sensor Framework[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-1)]
+
+Sensor devices are used widely in mobile devices to enhance user experience. Most modern mobile OSs have a framework which manages hardware and virtual sensors on the platform and provides convenient API to the application.
+
+#### Types of Sensors[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-2)]
+
+Sensors are classified as hardware and virtual sensors. Tizen supports individual HAL for the following sensors:
+
+- Hardware sensors
+ - Accelerometer
+ - Geomagnetic sensor
+ - Gyroscope
+ - Light sensor
+ - Proximity sensor
+ - Pressure sensor
+ - Ultraviolet sensor
+ - Temperature sensor
+ - Humidity sensor
+ - HRM (Heart Rate Monitor)
+ - HRM LED green sensor
+ - HRM LED IR sensor
+ - HRM LED red sensor
+ - Uncalibrated geomagnetic sensor
+ - Uncalibrated gyroscope sensor
+ - Human pedometer
+ - Human sleep monitor
+ - Human sleep detector
+ - Human stress monitor
+- Virtual sensors
+ - Orientation sensor
+ - Gravity sensor
+ - Linear acceleration sensor
+ - Rotation vector sensor
+ - Gyroscope rotation vector sensor
+ - Geomagnetic rotation vector sensor
+
+#### Architectural Overview[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-3)]
+
+The sensor framework provides a sensor server for managing sensor HALs and a medium through which the client applications are connected to the sensor handler to exchange data.
+
+[](https://wiki.tizen.org/File:Tizen_3_sensorfw.png)
+
+The sensor HALs retrieve data from sensor hardware and enable the client applications to use the data form specific requirements.
+
+#### Components of the Sensor Framework[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-4)]
+
+- Sensor Client Library
+
+Any application that wants to access the sensor server and communicate with it must use the sensor API library. Using the Sensor API, the application can control sensors and receive sensor events from the sensor server.
+As shown in the above diagram, any application or middleware framework, by using the sensor API, can have the sensor client library executing within its own process context.
+
+- Sensor Server
+
+The sensor server is a daemon which communicates uniquely to multiple sensors (through drivers) in the system and dispatches sensor data or events back to the application.
+The sensor server takes care of initializing the sensors during boot, driver configuration, sensor data fetching and delivery, and managing all sensors and client on the platform.
+
+- Sensor HAL (Hardware Abstraction Layer)
+
+The sensor HAL, which is interfaced to the sensor server, takes care of interacting with the sensor drivers. HAL processes the data from the sensor drivers and communicates it to the server. Hardware sensors have to support HAL.
+The sensor HAL is implemented as a shared library and the sensor_loader finds hal so library and loads it from the `/usr/lib/sensor/` directory at booting time.
+
+### Porting HAL Interface[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-5)]
+
+#### Sensor[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-6)]
+
+[](https://wiki.tizen.org/File:Tizen_3_sensor_fw_hal.png)
+
+- Adding New Hardware Sensors
+
+For porting new hardware sensors, the HAL library inherited `sensor_device` interface has to be implemented. You can find the HAL header files in `git:sensord/src/hal`.
+
+The Tizen HAL sensor types are also defined in the `sensor_hal_types.h` header file under the names `SENSOR_DEVICE_...`.
+
+The following code snippet shows the interface of the sensor HAL in the `sensor_hal.h` header file.
+
+```
+/*
+ Create devices
+*/
+typedef void *sensor_device_t;
+typedef int (*create_t)(sensor_device_t **devices);
+
+/*
+ Sensor device interface
+ 1 device must be abstracted from 1 device event node
+*/
+class sensor_device {
+public:
+ virtual ~sensor_device() {}
+
+ uint32_t get_hal_version(void)
+ {
+ return SENSOR_HAL_VERSION(1, 0);
+ }
+
+ virtual int get_poll_fd(void) = 0;
+ virtual int get_sensors(const sensor_info_t **sensors) = 0;
+
+ virtual bool enable(uint32_t id) = 0;
+ virtual bool disable(uint32_t id) = 0;
+
+ virtual int read_fd(uint32_t **ids) = 0;
+ virtual int get_data(uint32_t id, sensor_data_t **data, int *length) = 0;
+
+ virtual bool set_interval(uint32_t id, unsigned long val)
+ {
+ return true;
+ }
+ virtual bool set_batch_latency(uint32_t id, unsigned long val)
+ {
+ return true;
+ }
+ virtual bool set_attribute_int(uint32_t id, int32_t attribute, int32_t value)
+ {
+ return true;
+ }
+ virtual bool set_attribute_str(uint32_t id, int32_t attribute, char *value, int value_len)
+ {
+ return true;
+ }
+ virtual bool flush(uint32_t id)
+ {
+ return true;
+ }
+};
+
+```
+
+The following table shows the description of the `sensor_device` interface.
+
+| Prototype | Description | Return value |
+| ---------------------------------------- | ---------------------------------------- | ----------------- |
+| `uint32_t get_hal_version(void)` | Returns the HAL version. | Version |
+| `int get_poll_fd(void)` | Returns the file description to poll events. | `fd` |
+| `int get_sensors(const sensor_info_t **sensors)` | Returns the list of supported sensors.See the `sensor_info_t` in the `sensor_hal_types.h` header file. | Size |
+| `bool enable(uint32_t id)` | Enables the sensor. | `true` on success |
+| `bool disable(uint32_t id)` | Disables the sensor. | `true` on success |
+| `int read_fd(uint32_t **ids)` | Returns the sensor device IDs.The sensor framework calls this function when an event is detected from the `poll-fd` | Size |
+| `int get_data(uint32_t id, sensor_data_t **data, int *length)` | Updates the `sensor_data_t` object (data) with the details about the sensor, such as accuracy, timestamp, and values.Note that the `sensor_data_t` object has to be created using the `malloc()` function. | 0 on success |
+| `bool set_interval(uint32_t id, unsigned long val)` | Sets the interval. | `true` on success |
+| `bool set_batch_latency(uint32_t id, unsigned long val)` | Sets the batch latecy. | `true` on success |
+| `bool set_attribute_int(uint32_t id, int32_t attribute, int32_t value)` | Sets the `int` value to the attribute. | `true` on success |
+| `bool set_attribute_str(uint32_t id, int32_t attribute, char *value, int value_len)` | Sets the string value to attribute. | `true` on success |
+| `bool flush(uint32_t id)` | Flushes the sensor events. | `true` on success |
+| `int (create_t *)(sensor_device_t **devices)` | Returns the list of `sensor_device`.You must implement this interface for creating the sensor module in `sensord`. | Size |
+
+The following code snippet shows the interface of the sensor HAL types in the `sensor_hal_type.h` header file.
+
+```
+/*
+ Sensor Types
+ These types are used to control the sensors
+
+ - base unit
+ acceleration values : meter per second^2 (m/s^2)
+ magnetic values : micro-Tesla (uT)
+ orientation values : degrees
+ gyroscope values : degree/s
+ temperature values : degrees centigrade
+ proximity valeus : distance
+ light values : lux
+ pressure values : hectopascal (hPa)
+ humidity : relative humidity (%)
+*/
+typedef enum {
+ SENSOR_DEVICE_UNKNOWN = -2,
+ SENSOR_DEVICE_ALL = -1,
+ SENSOR_DEVICE_ACCELEROMETER,
+ SENSOR_DEVICE_GRAVITY,
+ SENSOR_DEVICE_LINEAR_
+ SENSOR_DEVICE_GEOMAGNETIC,
+ SENSOR_DEVICE_ROTATION_VECTOR,
+ SENSOR_DEVICE_ORIENTATION,
+ SENSOR_DEVICE_GYROSCOPE,
+ SENSOR_DEVICE_LIGHT,
+ SENSOR_DEVICE_PROXIMITY,
+ SENSOR_DEVICE_PRESSURE,
+ SENSOR_DEVICE_ULTRAVIOLET,
+ SENSOR_DEVICE_TEMPERATURE,
+ SENSOR_DEVICE_HUMIDITY,
+ SENSOR_DEVICE_HRM,
+ SENSOR_DEVICE_HRM_LED_GREEN,
+ SENSOR_DEVICE_HRM_LED_IR,
+ SENSOR_DEVICE_HRM_LED_RED,
+ SENSOR_DEVICE_GYROSCOPE_UNCAL,
+ SENSOR_DEVICE_GEOMAGNETIC_UNCAL,
+ SENSOR_DEVICE_GYROSCOPE_RV,
+ SENSOR_DEVICE_GEOMAGNETIC_RV,
+
+ SENSOR_DEVICE_HUMAN_PEDOMETER = 0x300,
+ SENSOR_DEVICE_HUMAN_SLEEP_MONITOR,
+ SENSOR_DEVICE_HUMAN_SLEEP_DETECTOR,
+ SENSOR_DEVICE_HUMAN_STRESS_MONITOR,
+
+ SENSOR_DEVICE_EXERCISE_WALKING = 0x400,
+ SENSOR_DEVICE_EXERCISE_RUNNING,
+ SENSOR_DEVICE_EXERCISE_HIKING,
+ SENSOR_DEVICE_EXERCISE_CYCLING,
+ SENSOR_DEVICE_EXERCISE_ELLIPTICAL,
+ SENSOR_DEVICE_EXERCISE_INDOOR_CYCLING,
+ SENSOR_DEVICE_EXERCISE_ROWING,
+ SENSOR_DEVICE_EXERCISE_STEPPER,
+
+ SENSOR_DEVICE_FUSION = 0x900,
+ SENSOR_DEVICE_AUTO_ROTATION,
+ SENSOR_DEVICE_AUTO_BRIGHTNESS,
+
+ SENSOR_DEVICE_GESTURE_MOVEMENT = 0x1200,
+ SENSOR_DEVICE_GESTURE_WRIST_UP,
+ SENSOR_DEVICE_GESTURE_WRIST_
+ SENSOR_DEVICE_GESTURE_MOVEMENT_STATE,
+
+ SENSOR_DEVICE_ACTIVITY_TRACKER = 0x1A00,
+ SENSOR_DEVICE_ACTIVITY_LEVEL_MONITOR,
+} sensor_device_type;
+
+```
+
+The following code snippet shows the interface of the sensor HAL infomation in the `sensor_hal_type.h` header file.
+
+```
+/*
+ A platform sensor handler is generated based on this handle
+ This ID can be assigned from HAL developer, so it has to be unique in 1 sensor_device.
+*/
+typedef struct sensor_info_t {
+ uint32_t
+ const char *name;
+ sensor_device_type type;
+ unsigned int event_type; /* for Internal API */
+ const char *model_name;
+ const char *vendor;
+ float min_range;
+ float max_range;
+ float resolution;
+ int min_interval;
+ int max_batch_count;
+ bool wakeup_supported;
+} sensor_info_t;
+
+enum sensor_accuracy_t {
+ SENSOR_ACCURACY_UNDEFINED = -1,
+ SENSOR_ACCURACY_BAD = 0,
+ SENSOR_ACCURACY_NORMAL = 1,
+ SENSOR_ACCURACY_GOOD = 2,
+ SENSOR_ACCURACY_VERYGOOD = 3
+};
+
+#define SENSOR_DATA_VALUE_SIZE 16
+
+/* sensor_data_t */
+typedef struct sensor_data_t {
+ int accuracy;
+ unsigned long long timestamp;
+ int value_count;
+ float values[SENSOR_DATA_VALUE_SIZE];
+} sensor_data_t;
+
+#define SENSOR_PEDOMETER_DATA_DIFFS_SIZE 20
+
+typedef struct {
+ int accuracy;
+ unsigned long long timestamp;
+ int value_count; /* value_count == 8 */
+ float values[SENSOR_DATA_VALUE_SIZE];
+ /* values = {step count, walk step count, run step count,
+ moving distance, calorie burned, last speed,
+ last stepping frequency (steps per sec),
+ last step status (walking, running, ...)} */
+ /* Additional data attributes (not in sensor_data_t)*/
+ int diffs_count;
+ struct differences {
+ int timestamp;
+ int steps;
+ int walk_steps;
+ int run_steps;
+ int walk_up_steps;
+ int walk_down_steps;
+ int run_up_steps;
+ int run_down_steps;
+ float distance;
+ float calories;
+ float speed;
+ } diffs[SENSOR_PEDOMETER_DATA_DIFFS_SIZE];
+} sensor_pedometer_data_t;
+
+#define CONVERT_TYPE_ATTR(type, index) ((type) << 8 | 0x80 | (index))
+
+enum sensor_attribute {
+ SENSOR_ATTR_ACTIVITY = CONVERT_TYPE_ATTR(SENSOR_DEVICE_ACTIVITY_TRACKER, 0x1),
+};
+
+enum sensor_activity {
+ SENSOR_ACTIVITY_UNKNOWN = 1,
+ SENSOR_ACTIVITY_STILL = 2,
+ SENSOR_ACTIVITY_WALKING = 4,
+ SENSOR_ACTIVITY_RUNNING = 8,
+ SENSOR_ACTIVITY_IN_VEHICLE = 16,
+ SENSOR_ACTIVITY_ON_BICYCLE = 32,
+};
+
+```
+
+The following code snippet shows an example of the `sensor_device` implementation for the accelerometer (`sensor-hal-tm1/src/`).
+
+```
+/* In create.cpp */
+#include
+#include
+#include
+
+#include "accel/accel_device.h"
+
+static std::vector devs;
+
+template
+void
+create_sensor(const char *name)
+{
+ sensor_device *instance = NULL;
+ try {
+ instance = new _sensor;
+ } catch (std::exception &e) {
+ ERR("Failed to create %s sensor device, exception: %s", name, e.what());
+
+ return;
+ } catch (int err) {
+ _ERRNO(err, _E, "Failed to create %s sensor device", name);
+
+ return;
+ }
+
+ devs.push_back(instance);
+}
+
+extern "C" int create(sensor_device_t **devices)
+{
+#ifdef ENABLE_ACCEL
+ create_sensor("Accelerometer");
+#endif
+
+ *devices = &devs[0];
+
+ return devs.size();
+}
+
+```
+
+```
+/* In accel_device.h */
+#ifndef _ACCEL_DEVICE_H_
+#define _ACCEL_DEVICE_H_
+
+#include
+#include
+#include
+#include
+
+class accel_device : public sensor_device {
+public:
+ accel_device();
+ virtual ~accel_device();
+
+ int get_poll_fd(void);
+ int get_sensors(const sensor_info_t **sensors);
+
+ bool enable(uint32_t id);
+ bool disable(uint32_t id);
+
+ bool set_interval(uint32_t id, unsigned long val);
+
+ int read_fd(uint32_t **ids);
+ int get_data(uint32_t id, sensor_data_t **data, int *length);
+
+private:
+ int m_node_handle;
+ int m_x;
+ int m_y;
+ int m_z;
+ unsigned long m_polling_interval;
+ unsigned long long m_fired_time;
+ bool m_sensorhub_controlled;
+
+ int m_method;
+ std::string m_data_node;
+ std::string m_enable_node;
+ std::string m_interval_node;
+
+ std::function update_value;
+
+ std::vector event_ids;
+
+ bool update_value_input_event(void);
+ bool update_value_iio(void);
+
+ void raw_to_base(sensor_data_t *data);
+};
+#endif /* _ACCEL_DEVICE_H_ */
+
+```
+
+```
+/* In accel_device.cpp */
+#include
+#include
+#include
+#include
+
+#include
+#include
+#include
+
+#include
+#include
+#include
+
+#include "accel_device.h"
+
+#define MODEL_NAME "K2HH"
+#define VENDOR "ST Microelectronics"
+#define RESOLUTION 16
+#define RAW_DATA_UNIT 0.122
+#define MIN_INTERVAL 1
+#define MAX_BATCH_COUNT 0
+
+#define SENSOR_NAME "SENSOR_ACCELEROMETER"
+#define SENSOR_TYPE_ACCEL "ACCEL"
+
+#define INPUT_NAME "accelerometer_sensor"
+#define ACCEL_SENSORHUB_POLL_NODE_NAME "accel_poll_delay"
+
+#define GRAVITY 9.80665
+#define G_TO_MG 1000
+#define RAW_DATA_TO_G_UNIT(X) (((float)(X))/((float)G_TO_MG))
+#define RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(X) (GRAVITY * (RAW_DATA_TO_G_UNIT(X)))
+
+#define MIN_RANGE(RES) (-((1 << (RES))/2))
+#define MAX_RANGE(RES) (((1 << (RES))/2)-1)
+
+static sensor_info_t sensor_info = {
+ id: 0x1,
+ name: SENSOR_NAME,
+ type: SENSOR_DEVICE_ACCELEROMETER,
+ event_type: (SENSOR_DEVICE_ACCELEROMETER << SENSOR_EVENT_SHIFT) | RAW_DATA_EVENT,
+ model_name: MODEL_NAME,
+ vendor: VENDOR,
+ min_range: MIN_RANGE(RESOLUTION) * RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(RAW_DATA_UNIT),
+ max_range: MAX_RANGE(RESOLUTION) * RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(RAW_DATA_UNIT),
+ resolution: RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(RAW_DATA_UNIT),
+ min_interval: MIN_INTERVAL,
+ max_batch_count: MAX_BATCH_COUNT,
+ wakeup_supported: false
+};
+
+accel_device::accel_device()
+: m_node_handle(-1)
+, m_x(-1)
+, m_y(-1)
+, m_z(-1)
+, m_polling_interval(1000)
+, m_fired_time(0)
+, m_sensorhub_controlled(false)
+{
+ const std::string sensorhub_interval_node_name = ACCEL_SENSORHUB_POLL_NODE_NAME;
+
+ node_info_query query;
+ node_info info;
+
+ query.sensorhub_controlled = m_sensorhub_controlled = util::is_sensorhub_controlled(sensorhub_interval_node_name);
+ query.sensor_type = SENSOR_TYPE_ACCEL;
+ query.key = INPUT_NAME;
+ query.iio_enable_node_name = "accel_enable";
+ query.sensorhub_interval_node_name = sensorhub_interval_node_name;
+
+ if (!util::get_node_info(query, info)) {
+ _E("Failed to get node info");
+ throw ENXIO;
+ }
+
+ util::show_node_info(info);
+
+ m_method = info.method;
+ m_data_node = info.data_node_path;
+ m_enable_node = info.enable_node_path;
+ m_interval_node = info.interval_node_path;
+
+ m_node_handle = open(m_data_node.c_str(), O_RDONLY);
+
+ if (m_node_handle < 0) {
+ _ERRNO(errno, _E, "accel handle open fail for accel processor");
+ throw ENXIO;
+ }
+
+ if (m_method == INPUT_EVENT_METHOD) {
+ if (!util::set_monotonic_clock(m_node_handle))
+ throw ENXIO;
+
+ update_value = [=]() {
+ return this->update_value_input_event();
+ };
+ } else {
+ if (!info.buffer_length_node_path.empty())
+ util::set_node_value(info.buffer_length_node_path, 480);
+
+ if (!info.buffer_enable_node_path.empty())
+ util::set_node_value(info.buffer_enable_node_path, 1);
+
+ update_value = [=]() {
+ return this->update_value_iio();
+ };
+ }
+
+ _I("accel_device is created!");
+}
+
+accel_device::~accel_device()
+{
+ close(m_node_handle);
+ m_node_handle = -1;
+
+ _I("accel_device is destroyed!");
+}
+
+int
+accel_device::get_poll_fd(void)
+{
+ return m_node_handle;
+}
+
+int
+accel_device::get_sensors(const sensor_info_t **sensors)
+{
+ *sensors = &sensor_info;
+
+ return 1;
+}
+
+bool
+accel_device::enable(uint32_t id)
+{
+ util::set_enable_node(m_enable_node, m_sensorhub_controlled, true, SENSORHUB_ACCELEROMETER_ENABLE_BIT);
+ set_interval(id, m_polling_interval);
+
+ m_fired_time = 0;
+ _I("Enable accelerometer sensor");
+
+ return true;
+}
+
+bool
+accel_device::disable(uint32_t id)
+{
+ util::set_enable_node(m_enable_node, m_sensorhub_controlled, false, SENSORHUB_ACCELEROMETER_ENABLE_BIT);
+
+ _I("Disable accelerometer sensor");
+
+ return true;
+}
+
+bool
+accel_device::set_interval(uint32_t id, unsigned long val)
+{
+ unsigned long long polling_interval_ns;
+
+ polling_interval_ns = ((unsigned long long)(val) * 1000llu * 1000llu);
+
+ if (!util::set_node_value(m_interval_node, polling_interval_ns)) {
+ _E("Failed to set polling resource: %s", m_interval_node.c_str());
+
+ return false;
+ }
+
+ _I("Interval is changed from %dms to %dms", m_polling_interval, val);
+ m_polling_interval = val;
+
+ return true;
+}
+
+bool
+accel_device::update_value_input_event(void)
+{
+ int accel_raw[3] = {0,};
+ bool x,y,z;
+ int read_input_cnt = 0;
+ const int INPUT_MAX_BEFORE_SYN = 10;
+ unsigned long long fired_time = 0;
+ bool syn = false;
+
+ x = y = z = false;
+
+ struct input_event accel_input;
+ _D("accel event detection!");
+
+ while ((syn == false) && (read_input_cnt < INPUT_MAX_BEFORE_SYN)) {
+ int len = read(m_node_handle, &accel_input, sizeof(accel_input));
+ if (len != sizeof(accel_input)) {
+ _E("accel_file read fail, read_len = %d",len);
+
+ return false;
+ }
+
+ ++read_input_cnt;
+
+ if (accel_input.type == EV_REL) {
+ switch (accel_input.code) {
+ case REL_X:
+ accel_raw[0] = (int)accel_input.value;
+ x = true;
+ break;
+ case REL_Y:
+ accel_raw[1] = (int)accel_input.value;
+ y = true;
+ break;
+ case REL_Z:
+ accel_raw[2] = (int)accel_input.value;
+ z = true;
+ break;
+ default:
+ _E("accel_input event[type = %d, code = %d] is unknown.", accel_input.type, accel_input.code);
+
+ return false;
+ break;
+ }
+ } else if (accel_input.type == EV_SYN) {
+ syn = true;
+ fired_time = util::get_timestamp(&accel_input.time);
+ } else {
+ _E("accel_input event[type = %d, code = %d] is unknown.", accel_input.type, accel_input.code);
+
+ return false;
+ }
+ }
+
+ if (syn == false) {
+ _E("EV_SYN didn't come until %d inputs had come", read_input_cnt);
+
+ return false;
+ }
+
+ if (x)
+ m_x = accel_raw[0];
+ if (y)
+ m_y = accel_raw[1];
+ if (z)
+ m_z = accel_raw[2];
+
+ m_fired_time = fired_time;
+
+ _D("m_x = %d, m_y = %d, m_z = %d, time = %lluus", m_x, m_y, m_z, m_fired_time);
+
+ return true;
+}
+
+bool
+accel_device::update_value_iio(void)
+{
+ struct {
+ int16_t x;
+ int16_t y;
+ int16_t z;
+ int64_t timestamp;
+ } __attribute__((packed)) data;
+
+ struct pollfd pfd;
+
+ pfd.fd = m_node_handle;
+ pfd.events = POLLIN | POLLERR;
+ pfd.revents = 0;
+
+ int ret = poll(&pfd, 1, -1);
+
+ if (ret == -1) {
+ _ERRNO(errno, _E, "Failed to poll from m_node_handle:%d", m_node_handle);
+
+ return false;
+ } else if (!ret) {
+ _E("poll timeout m_node_handle:%d", m_node_handle);
+
+ return false;
+ }
+
+ if (pfd.revents & POLLERR) {
+ _E("poll exception occurred! m_node_handle:%d", m_node_handle);
+
+ return false;
+ }
+
+ if (!(pfd.revents & POLLIN)) {
+ _E("poll nothing to read! m_node_handle:%d, pfd.revents = %d", m_node_handle, pfd.revents);
+
+ return false;
+ }
+
+ int len = read(m_node_handle, &data, sizeof(data));
+
+ if (len != sizeof(data)) {
+ _E("Failed to read data, m_node_handle:%d read_len:%d", m_node_handle, len);
+
+ return false;
+ }
+
+ m_x = data.x;
+ m_y = data.y;
+ m_z = data.z;
+ m_fired_time = data.timestamp;
+
+ _D("m_x = %d, m_y = %d, m_z = %d, time = %lluus", m_x, m_y, m_z, m_fired_time);
+
+ return true;
+}
+
+int
+accel_device::read_fd(uint32_t **ids)
+{
+ if (!update_value()) {
+ _D("Failed to update value");
+
+ return false;
+ }
+
+ event_ids.clear();
+ event_ids.push_back(sensor_info.id);
+
+ *ids = &event_ids[0];
+
+ return event_ids.size();
+}
+
+int
+accel_device::get_data(uint32_t id, sensor_data_t **data, int *length)
+{
+ sensor_data_t *sensor_data;
+
+ /* [Important] In HAL, you MUST allocate memory for data.
+ * HAL doesn't need to care of releasing this memory because this memory must be released after sending this data to clients.
+ */
+ sensor_data = (sensor_data_t *)malloc(sizeof(sensor_data_t));
+ retvm_if(!sensor_data, -ENOMEM, "Memory allocation failed");
+
+ sensor_data->accuracy = SENSOR_ACCURACY_GOOD;
+ sensor_data->timestamp = m_fired_time;
+ sensor_data->value_count = 3;
+ sensor_data->values[0] = m_x;
+ sensor_data->values[1] = m_y;
+ sensor_data->values[2] = m_z;
+
+ raw_to_base(sensor_data);
+
+ *data = sensor_data;
+ *length = sizeof(sensor_data_t);
+
+ return 0;
+}
+
+void
+accel_device::raw_to_base(sensor_data_t *data)
+{
+ data->values[0] = RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(data->values[0] * RAW_DATA_UNIT);
+ data->values[1] = RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(data->values[1] * RAW_DATA_UNIT);
+ data->values[2] = RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(data->values[2] * RAW_DATA_UNIT);
+}
+
+```
+
+#### Sensorhub[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-7)]
+
+The sensorhub HAL supports multiple sensors logically from 1 physical device file. In case many sensors are simultaneously supported by the single device file, the sensorhub HAL can be comprised so that it can operate each sensor as a logically separate device.
+
+- Providing the sensor HAL interface to manufacturers/vendors through the `sensor_hal.h` and `sensor_hal_types.h` header files.
+- Using just 1 thread for polling sensor events from multiple device files
+
+[](https://wiki.tizen.org/File:Tizen_3_sensorhub2.png)
+
+The sensorhub HAL can be developed by using the `sensor_device` interface. An example of sensorhub HAL can be found in the `sensor-hal-tm1/src/sensorhub` git.
+
+IDs can be assigned by the vendor or manufacturer for the sensorhub sensors by using the following `sensor_info_t` interface.
+
+```
+typedef struct sensor_info_t {
+ uint32_t id;
+ const char *name;
+ sensor_device_type type;
+ unsigned int event_type; /* For Internal API */
+ const char *model_name;
+ const char *vendor;
+ float min_range;
+ float max_range;
+ float resolution;
+ int min_interval;
+ int max_batch_count;
+ bool wakeup_supported;
+} sensor_info_t;
+
+```
+
+The following code snippet shows an example of the sensorhub HAL implementation.
+
+```
+#include
+#include
+
+#include "sensorhub.h"
+#include "sensorhub_controller.h"
+#include "sensorhub_manager.h"
+#include "system_state.h"
+
+sensorhub_device::sensorhub_device()
+{
+ controller = &sensorhub_controller::get_instance();
+ if (!controller) {
+ ERR("Failed to allocated memory");
+ throw;
+ }
+
+ manager = &sensorhub_manager::get_instance();
+ if (!manager) {
+ ERR("Failed to allocated memory");
+ throw;
+ }
+ manager->set_controller(controller);
+ system_state_handler::get_instance().set_controller(controller);
+
+ INFO("sensorhub_device is created!");
+}
+
+sensorhub_device::~sensorhub_device()
+{
+ INFO("sensorhub_device is destroyed!");
+}
+
+int
+sensorhub_device::get_poll_fd(void)
+{
+ return controller->get_poll_fd();
+}
+
+int
+sensorhub_device::get_sensors(const sensor_info_t **sensors)
+{
+ int size;
+ size = manager->get_sensors(sensors);
+
+ return size;
+}
+
+bool
+sensorhub_device::enable(uint32_t id)
+{
+ system_state_handler::get_instance().initialize();
+
+ controller->enable();
+ sensorhub_sensor *sensor = manager->get_sensor(id);
+
+ if (!sensor) {
+ ERR("Failed to enable sensor(0x%x)", id);
+
+ return false;
+ }
+
+ return sensor->enable();
+}
+
+bool
+sensorhub_device::disable(uint32_t id)
+{
+ system_state_handler::get_instance().finalize();
+
+ controller->disable();
+ sensorhub_sensor *sensor = manager->get_sensor(id);
+
+ if (!sensor) {
+ ERR("Failed to disable sensor(0x%x)", id);
+
+ return false;
+ }
+
+ return sensor->disable();
+}
+
+bool
+sensorhub_device::set_interval(uint32_t id, unsigned long val)
+{
+ sensorhub_sensor *sensor = manager->get_sensor(id);
+
+ if (!sensor) {
+ ERR("Failed to set interval to sensor(0x%x)", id);
+
+ return false;
+ }
+
+ return sensor->set_interval(val);
+}
+
+bool
+sensorhub_device::set_batch_latency(uint32_t id, unsigned long val)
+{
+ sensorhub_sensor *sensor = manager->get_sensor(id);
+
+ if (!sensor) {
+ ERR("Failed to set batch latency to sensor(0x%x)", id);
+
+ return false;
+ }
+
+ return sensor->set_batch_latency(val);
+}
+
+bool
+sensorhub_device::set_attribute_int(uint32_t id, int32_t attribute, int32_t value)
+{
+ int ret;
+
+ sensorhub_sensor *sensor = manager->get_sensor(id);
+
+ if (!sensor) {
+ ERR("Failed to set attribute to sensor(0x%x)", id);
+
+ return false;
+ }
+
+ ret = sensor->set_attribute_int(attribute, value);
+
+ if ((ret < 0) && (ret != -EBUSY)) {
+ ERR("Failed to send sensorhub data");
+
+ return false;
+ }
+
+ if (ret == -EBUSY) {
+ WARN("Command is sent during sensorhub firmware update");
+
+ return false;
+ }
+
+ return true;
+}
+
+bool
+sensorhub_device::set_attribute_str(uint32_t id, int32_t attribute, char *value, int value_len)
+{
+ int ret;
+
+ sensorhub_sensor *sensor = manager->get_sensor(id);
+
+ if (!sensor) {
+ ERR("Failed to set attribute to sensor(0x%x)", id);
+
+ return false;
+ }
+
+ ret = sensor->set_attribute_str(attribute, value, value_len);
+
+ if ((ret < 0) && (ret != -EBUSY)) {
+ ERR("Failed to send sensorhub data");
+
+ return false;
+ }
+
+ if (ret == -EBUSY) {
+ WARN("Command is sent during sensorhub firmware update");
+
+ return false;
+ }
+
+ return true;
+}
+
+int
+sensorhub_device::read_fd(uint32_t **ids)
+{
+ sensorhub_data_t data;
+
+ /* Step 1 */
+ if (!controller->read_fd(data))
+ return 0;
+
+ /* Step 2 */
+ const char *hub_data = data.values;
+ int data_len = data.value_count;
+
+ /* Step 3 */
+ event_ids.clear();
+
+ while (data_len > 0) {
+ DBG("Remaining data length: %d", data_len);
+ int parsed = parse(hub_data, data_len);
+ if (parsed < 0) {
+ ERR("Parsing failed");
+ break;
+ }
+
+ data_len -= parsed;
+ hub_data += parsed;
+ }
+
+ /* Step 4 */
+ int size = event_ids.size();
+
+ if (event_ids.empty())
+ return 0;
+
+ *ids = &event_ids[0];
+
+ return size;
+}
+
+int
+sensorhub_device::get_data(uint32_t id, sensor_data_t **data, int *length)
+{
+ int remains = 1;
+
+ sensorhub_sensor *sensor = manager->get_sensor(id);
+ if (!sensor) {
+ ERR("Failed to get data from sensor(0x%x)", id);
+
+ return -1;
+ }
+
+ remains = sensor->get_data(data, length);
+
+ return remains;
+}
+
+bool
+sensorhub_device::flush(uint32_t id)
+{
+ return false;
+}
+
+int
+sensorhub_device::parse(const char *hub_data, int data_len)
+{
+ return parse_data(hub_data, data_len);
+}
+
+int
+sensorhub_device::parse_data(const char *hub_data, int data_len)
+{
+ const char *cursor = hub_data;
+ int32_t libtype = 0;
+
+ sensorhub_sensor *sensor = manager->get_sensor(libtype);
+ if (!sensor) {
+ ERR("Unknown Sensorhub lib type: %d", libtype);
+
+ return -1;
+ }
+
+ event_ids.push_back(sensor->get_id());
+
+ return sensor->parse(cursor, data_len);
+}
+
+int
+sensorhub_device::parse_debug(const char *hub_data, int data_len)
+{
+ return 0;
+}
+
+```
+
+```
+#include
+#include
+#include
+#include
+#include
+#include
+#include
+#include
+
+#include
+#include
+#include "sensorhub_controller.h"
+
+sensorhub_controller::sensorhub_controller()
+: m_enabled(false)
+, m_poll_node(-1)
+, m_data_node(-1)
+{
+}
+
+sensorhub_controller::~sensorhub_controller()
+{
+}
+
+sensorhub_controller& sensorhub_controller::get_instance(void)
+{
+ static sensorhub_controller instance;
+
+ return instance;
+}
+
+int
+sensorhub_controller::get_poll_fd(void)
+{
+ /* Returns the sensorhub fd */
+
+ return -1;
+}
+
+bool
+sensorhub_controller::enable(void)
+{
+ m_enabled = true;
+ INFO("Enable Sensorhub");
+
+ return true;
+}
+
+bool
+sensorhub_controller::disable(void)
+{
+ m_enabled = false;
+ INFO("Disable Sensorhub");
+
+ return true;
+}
+
+int
+sensorhub_controller::open_input_node(const char* input_node)
+{
+ /* Implements the specific sensorhub logic */
+
+ return -1;
+}
+
+bool
+sensorhub_controller::read_fd(sensorhub_data_t &data)
+{
+ /* Implements the specific sensorhub logic */
+
+ return false;
+}
+
+int
+sensorhub_controller::read_sensorhub_data(void)
+{
+ /* Implements the specific sensorhub logic */
+
+ return -1;
+}
+
+int
+sensorhub_controller::read_large_sensorhub_data(void)
+{
+ /* Implements the specific sensorhub logic */
+
+ return -1;
+}
+
+int
+sensorhub_controller::send_sensorhub_data(const char *data, int data_len)
+{
+ /* Implements the specific sensorhub logic */
+
+ return -1;
+}
+
+int
+sensorhub_controller::print_sensorhub_data(const char* name, const char *data, int length)
+{
+ /* Implements the specific sensorhub logic */
+
+ return 0;
+}
+
+```
+
+### References[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-8)]
+
+The reference kernel configuration for sensors varies with different vendor types.
+However, there is a standard kernel subsystem for sensors, that is IIO(The Industrial I/O subsystem) subsystem. IIO is intended to provide support for devices that in some sense are analog to digital or digital to analog.
+For more information, see [https://wiki.analog.com/software/linux/docs/iio/iio](https://wiki.analog.com/software/linux/docs/iio/iio).
+
+Examples)
+
+| Sensor components | Kernel configuration | Device nodes |
+| ------------------ | ----------------------- | ---------------------------------------- |
+| Accelerometer | `CONFIG_INPUT_KR3DH` | `/dev/input/event0/``/dev/input/event1/``/dev/input/event2/``/dev/input/event3/``/dev/input/event4/``/dev/input/event5/` |
+| Proximity | `CONFIG_INPUT_GP2A` | |
+| Light sensor | `CONFIG_INPUT_GP2A` | |
+| Electronic compass | `CONFIG_SENSORS_AK8975` | |
+
+### Project Git Repository[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-9)]
+
+| Project | Repository | Description |
+| --------------------- | ---------------------------------------- | ---------------------------------------- |
+| `capi-system-sensor` | `platform/core/api/sensor` | Tizen sensor C-API |
+| `sensord` | `platform/core/system/sensord` | The sensor daemon and libraries for managing sensors and clients |
+| `sensor-hal-tm1` | `platform/adaptation/tm1/sensor-hal-tm1` | Sensor HAL for TM1 device |
+| `sensor-hal-tm2` | `platform/adaptation/tm2/sensor-hal-tm2` | Sensor HAL for TM2 device |
+| `sensor-hal-tw1` | `platform/adaptation/tw1/sensor-hal-tw1` | Sensor HAL for TW1 device |
+| `sensor-hal-emulator` | `platform/adaptation/emulator/sensor-hal-emulator` | Sensor HAL for emulator |
+
+### Test and Verify Sensors[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Sensor&action=edit§ion=T-10)]
+
+`sensor-test package`, which is in sensord git, provides a command line tool for testing sensors, that is `sensorctl`. after installing sensor-test package, you can test sensors by using following commands
+
+- $ sensorctl test accelerometer
+- $ sensorctl test gyroscope
+- $ sensorctl test accelerometer 100 /* enable accelerometer with interval 100 ms */
+- $ sensorctl test accelerometer 100 1000 /* enable accelerometer with interval 100 ms and 1s batch latency */
+- $ sensorctl test accelerometer 100 1000 0 /* enable accelerometer with interval 100 ms, 1s batch latency and always on option */
+- $ sensorctl info accelerometer /* retrieve accelerometer sensor information */
+
+# Graphics and UI[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=9)]
+
+The application composes the graphic user interface by creating a window with toolkit. The display server composites application's windows and show the result on screen. For this procedure, the graphics and UI middleware offers the next 3 modules for client and server.
+
+- [Tizen Buffer Manager (TBM)](https://wiki.tizen.org/TBM)
+- [Tizen Display Manager (TDM)](https://wiki.tizen.org/TDM)
+- [TPL-EGL](https://wiki.tizen.org/3.0_Porting_Guide/Graphics_and_UI/OpenGL)
+
+[](https://wiki.tizen.org/File:Graphics-ui-diagram.png)
+
+These modules allow the client and server to render with the GPU, share buffers with other processes, and organize hardware output devices for various chipset devices. They are HAL for graphics and UI. Their backend module needs to be implemented for the new hardware device.
+
+- [Tizen Buffer Manager (TBM)](https://wiki.tizen.org/TBM) provides the abstraction interface for the graphic buffer manager in Tizen.
+- [Tizen Display Manager (TDM)](https://wiki.tizen.org/TDM) provides the abstraction interface for the display server, such like a X server and a wayland server, to allow the direct access to graphics hardware in a safe and efficient manner as a display HAL.
+- [TPL-EGL](https://wiki.tizen.org/3.0_Porting_Guide/Graphics_and_UI/OpenGL) is an abstraction layer for surface and buffer management on Tizen platform aimed to implement the EGL porting layer of OpenGLES driver over various display protocols.
+
+For an application to handle input device's events, the [Input Manager](https://wiki.tizen.org/3.0_Porting_Guide/Graphics_and_UI/Input) is mainly comprised of `libinput` and a thin wrapper around it. It handles input events in wayland compositors and communicates with wayland clients.
+
+## Buffer Management[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI&action=edit§ion=T-1)]
+
+The TBM has a frontend libary and a backend module. The TBM frontend library is hardware-independent and provides the generic buffer interface for users. On the other hand, the TBM backend module is hardware-dependent and provides the buffer interface depended on the target system. The chipset vendors have to provide their own backend modules in order for the TBM to work well in Tizen platform. This is because the vendors' way to manage the graphic buffers can be different among various chipset devices. TBM already has several backends for reference, such as `libtbm-dumb`, and `libtbm-shm`.
+
+[](https://wiki.tizen.org/File:Tbm-backend.png)
+
+With TBM, the client and server can allocate buffers and share it between them. For example, a client allocates a graphic buffer, draws something on it with GL and sends it to the display server for displaying it on the screen without buffer copying. The TBM backend module is implemented as a shared library and the TBM frontend finds the `libtbm-default.so` file and loads it from the `/usr/lib/bufmgr` directory at runtime.
+
+```
+sh-3.2# ls -al
+lrwxrwxrwx 1 root root 14 Jul 28 2016 libtbm_default.so -> libtbm_sprd.so
+lrwxrwxrwx 1 root root 20 Jul 28 2016 libtbm_sprd.so -> libtbm_sprd.so.0.0.0
+lrwxrwxrwx 1 root root 20 Jul 28 2016 libtbm_sprd.so.0 -> libtbm_sprd.so.0.0.0
+-rwxr-xr-x 1 root root 26728 Jun 29 2016 libtbm_sprd.so.0.0.0
+
+```
+
+- Initialing the TBM backend module
+
+The `TBMModuleData` is for the entry point symbol to initialize the TBM backend module. The TBM backend module must have to define the global data symbol with the name of `tbmModuleData`. The TBM frontend loads the `tbmModuleData` global data symbol and calls the `init()` function at the initial time.
+
+| Note |
+| ---------------------------------------- |
+| Do not change the name of the symbol in the TBM backend module. |
+
+```
+/*
+ @brief tbm module data
+ Data type for the entry point of the backend module
+*/
+typedef struct {
+ TBMModuleVersionInfo *vers; /* TBM module information */
+ ModuleInitProc init; /* init function of a backend module */
+} TBMModuleData;
+
+typedef int (*ModuleInitProc) (tbm_bufmgr, int);
+
+```
+
+At the initialization of the backend module, the backend module allocates the `tbm_bufmgr_backend` instance (`tbm_backend_alloc`), fills the information, and initializes the backend module to the TBM (`tbm_backend_init`).
+
+```
+tbm_bufmgr_backend tbm_backend_alloc(void);
+void tbm_backend_free(tbm_bufmgr_backend backend);
+int tbm_backend_init(tbm_bufmgr bufmgr, tbm_bufmgr_backend backend);
+
+```
+
+```
+MODULEINITPPROTO (init_tbm_bufmgr_priv);
+
+static TBMModuleVersionInfo DumbVersRec =
+{
+ "shm",
+ "Samsung",
+ TBM_ABI_VERSION,
+};
+
+TBMModuleData tbmModuleData = {&DumbVersRec, init_tbm_bufmgr_priv};
+
+int
+init_tbm_bufmgr_priv(tbm_bufmgr bufmgr, int fd)
+{
+ tbm_bufmgr_backend bufmgr_backend;
+
+ bufmgr_shm = calloc(1, sizeof(struct _tbm_bufmgr_shm));
+
+ bufmgr_backend = tbm_backend_alloc();
+
+ bufmgr_backend->priv = (void *)bufmgr_shm;
+ bufmgr_backend->bufmgr_deinit = tbm_shm_bufmgr_deinit,
+ bufmgr_backend->bo_size = tbm_shm_bo_size,
+ bufmgr_backend->bo_alloc = tbm_shm_bo_alloc,
+ bufmgr_backend->bo_free = tbm_shm_bo_free,
+ bufmgr_backend->bo_import = tbm_shm_bo_import,
+ bufmgr_backend->bo_import_fd = NULL,
+ bufmgr_backend->bo_export = tbm_shm_bo_export,
+ bufmgr_backend->bo_export_fd = NULL,
+ bufmgr_backend->bo_get_handle = tbm_shm_bo_get_handle,
+ bufmgr_backend->bo_map = tbm_shm_bo_map,
+ bufmgr_backend->bo_unmap = tbm_shm_bo_unmap,
+ bufmgr_backend->bo_lock = NULL;
+ bufmgr_backend->bo_unlock = NULL;
+ bufmgr_backend->surface_get_plane_data = tbm_shm_surface_get_plane_data;
+ bufmgr_backend->surface_supported_format = tbm_shm_surface_supported_format;
+
+
+ if (!tbm_backend_init(bufmgr, bufmgr_backend))
+ {
+ tbm_backend_free(bufmgr_backend);
+ free(bufmgr_shm);
+
+ return 0;
+ }
+
+ return 1;
+}
+
+```
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/TBM&action=edit§ion=T-1)]
+
+TBM provides the header files to implement the TBM backend module.
+
+| Header file | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| [tbm_bufmgr_backend.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtbm.git;a=blob;f=src/tbm_bufmgr_backend.h;h=839ec996de16493e40b90c72066448d770575bca;hb=refs/heads/tizen) | This file includes the information to implement the TBM backend module. |
+| [tbm_drm_helper.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtbm.git;a=blob;f=src/tbm_drm_helper.h;h=0c93a378d2ddf64f2bcb9ebf6a1d0b85563670a2;hb=refs/heads/tizen) | This file includes the helper function for the drm interface backend module. |
+| [tbm_bufmgr.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtbm.git;a=blob;f=src/tbm_bufmgr.h;h=50fcf08101c2cb0a4b8750f3eda30d375c981ea7;hb=refs/heads/tizen) | This is the user header file including the general information to use the TBM. |
+| [tbm_surface.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtbm.git;a=blob;f=src/tbm_surface.h;h=0686a4ed2d0e26c0386e9f1232f0aa2a6e7f5eb6;hb=refs/heads/tizen) | This is the user header file including the general information to use the `tbm_surface`. |
+
+- TBM Backend interface
+
+The following table lists the TBM Backend interface for initializing and deinitializing.
+
+| Function | Description | |
+| ------------------------------ | ---------------------------------------- | --------- |
+| `ModuleInitProc()` | The `init` function of a backend module. | Mandatory |
+| `bufmgr_deinit()` | Deinitializes the buffer manager private. | Mandatory |
+| `bufmgr_bind_native_display()` | If the backend needs to get the native display, use this backend function. | Optional |
+
+The following table lists the TBM backend interface functions for `tbm_bo`.
+
+| Function | Description | |
+| ----------------- | ---------------------------------------- | ---------------------------------------- |
+| `bo_alloc()` | Allocates the buffer object.If backend wants to reuse the `bo` private at frontend, return the same pointer of the `bo` private. | Mandatory |
+| `bo_free()` | Frees the buffer object.The frontend calls this function when it does not use the `bo` private. | Mandatory |
+| `bo_import()` | Imports the buffer object associated with the key.If the backend does not support a buffer sharing by the TBM key, the function pointer must be set to `NULL`. | Optional |
+| `bo_export()` | Exports the buffer object.If the backend does not support a buffer sharing by TBM key, the function pointer must be set to `NULL`. | Optional |
+| `bo_import_fd()` | Imports the buffer object associated with the prime `fd.`The `tbm_fd` must be frees by the user. If the backend does not support a buffer sharing by TBM `fd`, the function pointer must be set to `NULL`. | Mandatory(Must support buffer sharing by TBM `fd`.) |
+| `bo_export_fd()` | Imports the buffer object associated with the prime `fd.`The `tbm_fd` must be freed by the user. If the backend does not support a buffer sharing by TBM `fd`, the function pointer must be set to `NULL`. | Mandatory(Must support buffer sharing by TBM `fd`.) |
+| `bo_get_flags()` | Gets the TBM flags of memory type | Mandatory |
+| `bo_size()` | Gets the size of a buffer object. | Mandatory |
+| `bo_get_handle()` | Gets the `tbm_bo_handle` according to the device type. | Mandatory |
+| `bo_map()` | Maps the buffer object according to the device type and the option. | Mandatory |
+| `bo_unmap()` | Unmaps the buffer object. | Mandatory |
+| `bo_lock()` | Locks the buffer object with a device and an opt. | Optional |
+| `bo_unlock()` | Unlocks the buffer object. | Optional |
+
+The following table lists the TBM backend interface for `tbm_surface`.
+
+| Function | Description | |
+| ---------------------------- | ---------------------------------------- | --------- |
+| `surface_supported_format()` | Queries the formats list and the number to be supported by backend. | Mandatory |
+| `surface_get_plane_data()` | Gets the plane data, such as the size, ofeset, pitch, and buffer object index of the surface. | Mandatory |
+| `surface_bo_alloc()` | Allocates the buffer object for TBM surface with width, height, format, and buffer object index.If the backend does not want to allocate the buffer of the TBM surface with width, format and height, the function pointer must be set to `NULL`. The TBM frontend allocation buffer of the TBM surface with data is gained from the `surface_get_plane_data()`. | Optional |
+
+The following table lists the TBM buffer memory types.
+
+| Buffer memory type | Description |
+| -------------------- | ---------------------------------------- |
+| `TBM_BO_DEFAULT` | Default memory: it depends on the backend |
+| `TBM_BO_SCANOUT` | Scanout memory |
+| `TBM_BO_NONCACHABLE` | Non-cachable memory |
+| `TBM_BO_WC` | Write-combine memory |
+| `TBM_BO_VENDOR` | Vendor specific memory (depends on the backend) |
+
+The following table lists the TBM buffer device types.
+
+| Device type | Description |
+| -------------------- | ---------------------------------------- |
+| `TBM_DEVICE_DEFAULT` | The device type to get the default handle |
+| `TBM_DEVICE_CPU` | The device type to get the virtual memory |
+| `TBM_DEVICE_2D` | The device type to get the 2D memory handle |
+| `TBM_DEVICE_3D` | The device type to get the 3D memory handle |
+| `TBM_DEVICE_MM` | The device type to get the multimedia handle |
+
+The following table lists the TBM buffer access options.
+
+| Access option | Description |
+| ------------------- | ---------------------------------------- |
+| `TBM_OPTION_READ` | The access option to read |
+| `TBM_OPTION_WRITE` | The access option to write |
+| `TBM_OPTION_VENDOR` | The vendor specific option that depends on the backend |
+
+- TBM DRM helper function
+
+If target uses the `drm` interface, the client needs to get the authenticated `fd` from the display server and the display server must share the `drm` master `fd` with the TDM backend module. The TBM frontend provides the helper functions for `drm`authentication with the wayland protocol and sharing the master `fd` with TDM backend module.
+
+| Function | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `tbm_drm_helper_wl_auth_server_init()` | If the TBM backend module need to use the authentication server, the backend module must call this function in the display server. |
+| `tbm_drm_helper_wl_auth_server_deinit()` | Deinitailizes the `drm` authentication in display server. |
+| `tbm_drm_helper_get_master_fd()` | If the TDM backend module already has a `drm` master `fd`, the TBM backend module can get the master `fd` from this function. |
+| `tbm_drm_helper_set_tbm_master_fd()` | If the TBM backend module opens the `drm` master `fd`, this function has to be called for sharing the `drm` master `fd` with TDM. |
+| `tbm_drm_helper_unset_tbm_master_fd()` | If the TBM backend module is opened and does not use the `drm` master `fd`, this function has to be called. |
+| `tbm_drm_helper_get_auth_info()` | Client gets the authenticated `fd` and device info from the display server. |
+
+### TBM Backends[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/TBM&action=edit§ion=T-2)]
+
+| Backend | Project ([http://review.tizen.org](http://review.tizen.org/)) | Description |
+| --------------- | ---------------------------------------- | ---------------------------------------- |
+| `libtbm-shm` | [platform/adaptation/libtbm-shm](https://review.tizen.org/gerrit/gitweb?p=platform/adaptation/libtbm-shm.git;a=summary) | The backend for the target device whitch supports the SHM memory interface.The SHM backend module uses the XSI shared memory segment and does not have hardware dependencies. |
+| `libtbm-dumb` | [platform/adaptation/libtbm-dumb](https://review.tizen.org/gerrit/gitweb?p=platform/adaptation/libtbm-dumb.git;a=summary) | The backend for the target device which supports the DUMB memory interface.If the target kernel supports the `drm` interface, the target can use the `dumb` backend because the DUMB memory interface is the default `drm` memory interface. |
+| `libtbm-sprd` | [platform/adaptation/spreadtrum/libtbm-sprd](https://review.tizen.org/gerrit/gitweb?p=platform/adaptation/spreadtrum/libtbm-sprd.git;a=summary) | The backend for the target device which uses the Spreadtrum chipset only.The `sprd` backend module uses the `drm` gem memory interface but some `ioctl` only provided by the `sprd drm` kernel. |
+| `libtbm-exynos` | [platform/adaptation/samsung_exynos/libtbm-exynos](https://review.tizen.org/gerrit/gitweb?p=platform/adaptation/samsung_exynos/libtbm-exynos.git;a=summary) | The backend for the target device which uses the exynos chipset only.The `exynos` backend module uses the `drm` gem memory interface but some `ioctl` only provided by `exynos drm` kernel. |
+| `libtbm-vigs` | [platform/adaptation/emulator/libtbm-vigs](https://review.tizen.org/gerrit/gitweb?p=platform/adaptation/emulator/libtbm-vigs.git;a=summary) | The backend for the target device which supports the VIGS interface.The `vigs` backend is used by the emulator target. |
+
+### Reference[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/TBM&action=edit§ion=T-3)]
+
+For more detailed information about the TBM and TBM backend, see [Tizen Buffer Manager (TBM)](https://wiki.tizen.org/TBM).
+
+## Display Management[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI&action=edit§ion=T-2)]
+
+The display server composites and shows the client's buffers on screen. The display server sometimes needs to convert or scale an image to a different size or format. To make it possible for various chipset devices, the display server needs the display hardware resource information and control them. [Tizen Display Manager (TDM)](https://wiki.tizen.org/TDM) offers these functionalities for the display server with the unified interface for various chipset devices.
+
+[](https://wiki.tizen.org/File:Tdm-backend.png)
+
+With TDM, the display server can do the mode setting, the DPMS control and showing a buffer (framebuffer or video buffer) on the screen in the most efficient way. If the hardware supports the m2m converting and capture device, the display server can also convert an image and dump a screen including all hardware overlays with no compositing.
+
+The vendor has to implement the TDM backend module. The TDM backend module has the responsibility to let the TDM frontend know the display hardware resource information. The display server gets this information and control hardware devices via the TDM frontend APIs. TDM already has several backends for reference, such as `libtdm-drm` and `libtdm-fbdev`.
+
+The TDM backend is implemented as a shared library and the TDM frontend finds the `libtdm-default.so` file and loads it in the `/usr/lib/tdm` directory at runtime.
+
+```
+sh-3.2# ls -l /usr/lib/tdm
+total 40
+lrwxrwxrwx 1 root root 14 Jul 28 2016 libtdm-default.so -> libtdm-drm.so
+-rwxr-xr-x 1 root root 37152 Jul 12 2016 libtdm-drm.so
+
+```
+
+The TDM backend module must define the global data symbol with the name `tdm_backend_module_data`. The TDM frontend reads this symbol at the initialization time. TDM calls the `init()` function of the `tdm_backend_module_data`. For more information, see [tdm_backend.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtdm.git;a=tree;h=refs/heads/tizen;hb=refs/heads/tizen).
+
+```
+typedef struct _tdm_backend_module {
+ const char *name; /* The module name of the backend module */
+ const char *vendor; /* The vendor name of the backend module */
+ unsigned long abi_version; /* The ABI version of the backend module */
+ tdm_backend_data *(*init)(tdm_display *dpy, tdm_error *error);
+ void (*deinit)(tdm_backend_data *bdata);
+} tdm_backend_module;
+
+```
+
+```
+#include
+
+static tdm_drm_data *drm_data;
+
+tdm_backend_data*
+tdm_drm_init(tdm_display *dpy, tdm_error *error)
+{
+ drm_data = calloc(1, sizeof(tdm_drm_data));
+
+ return (tdm_backend_data*)drm_data;
+}
+
+void
+tdm_drm_deinit(tdm_backend_data *bdata)
+{
+ free(bdata);
+}
+
+tdm_backend_module tdm_backend_module_data =
+{
+ "drm",
+ "Samsung",
+ TDM_BACKEND_SET_ABI_VERSION(1,1),
+ tdm_drm_init,
+ tdm_drm_deinit
+};
+
+```
+
+The TDM backend must register the `tdm_func_display()`, `tdm_func_output()`, and `tdm_func_layer()` functions with the `tdm_backend_register_func_display()`, `tdm_backend_register_func_output()`, and `tdm_backend_register_func_layer()` functions in the `tdm_backend_module_data` `init()` function.
+
+```
+#include
+
+tdm_backend_data*
+tdm_drm_init(tdm_display *dpy, tdm_error *error)
+{
+ memset(&drm_func_display, 0, sizeof(drm_func_display));
+ drm_func_display.display_get_capability = drm_display_get_capability;
+ drm_func_display.display_get_pp_capability = drm_display_get_pp_capability;
+ drm_func_display.display_get_outputs = drm_display_get_outputs;
+ drm_func_display.display_get_fd = drm_display_get_fd;
+ drm_func_display.display_handle_events = drm_display_handle_events;
+ drm_func_display.display_create_pp = drm_display_create_pp;
+ ret = tdm_backend_register_func_display(dpy, &drm_func_display);
+ if (ret != TDM_ERROR_NONE)
+ goto failed;
+
+ memset(&drm_func_output, 0, sizeof(drm_func_output));
+ drm_func_output.output_get_capability = drm_output_get_capability;
+
+ ret = tdm_backend_register_func_output(dpy, &drm_func_output);
+ if (ret != TDM_ERROR_NONE)
+ goto failed;
+
+ memset(&drm_func_layer, 0, sizeof(drm_func_layer));
+ drm_func_layer.layer_get_capability = drm_layer_get_capability;
+
+ ret = tdm_backend_register_func_layer(dpy, &drm_func_layer);
+ if (ret != TDM_ERROR_NONE)
+ goto failed;
+
+ return (tdm_backend_data*)drm_data;
+}
+
+```
+
+After loading the TDM backend module, the TDM frontend calls the `display_get_capability()`, `display_get_outputs()`, `output_get_capability()`, `output_get_layers()`, and `layer_get_capability()` functions to get the hardware specific information. That is, the TDM backend module must implement these 5 functions.
+
+In addition, if a target has a memory-to-memory converting hardware device and the capture hardware device, the TDM backend module can register the `tdm_func_pp()` and `tdm_func_capture()` functions with the `tdm_backend_register_func_pp()` and `tdm_backend_register_func_capture()` functions.
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/TDM&action=edit§ion=T-1)]
+
+TDM provides the header files to implement the TDM backend module.
+
+| Header file | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| [tdm_backend.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtdm.git;a=tree;h=refs/heads/tizen;hb=refs/heads/tizen) | This file defines the TDM backend interface. |
+| [tdm_log.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtdm.git;a=tree;h=refs/heads/tizen;hb=refs/heads/tizen) | This file to print logs in frontend and backend modules. |
+| [tdm_helper.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtdm.git;a=tree;h=refs/heads/tizen;hb=refs/heads/tizen) | This file to help TDM backend/frontend user to implement. |
+
+The display backend interface is mandatory. For more information, see [tdm_backend.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtdm.git;a=tree;h=refs/heads/tizen;hb=refs/heads/tizen).
+
+| Function | Description | |
+| ---------------------------------- | ---------------------------------------- | --------- |
+| `display_get_capability()` | Gets the display capabilities of the backend module.TDM calls this function not only at the initialization, but also at the update time when new output is connected. If the hardware has the restriction of the number of max usable layer count, the backend module can set the max count to `max_layer_count` of the `tdm_caps_display` structure. Otherwise, set -1. | Mandatory |
+| `display_get_pp_capability()` | Gets the `pp` capabilities of the backend module.TDM calls this function not only at the initialization, but also at the update time when new output is connected. The backend module does not need to implement this function if the hardware does not have the memory-to-memory converting device. Otherwise, the backend module must fill the `tdm_caps_pp` data. The `tdm_caps_pp` contains the hardware restriction information which a converting device can handle, such as format and size. | Optional |
+| `display_get_capture_capability()` | Gets the capture capabilities of the backend module.TDM calls this function not only at the initialization, but also at the update time when new output is connected. The backend module does not need to implement this function if the hardware does not have the capture device. Otherwise, the backend module must fill the `tdm_caps_capture` data. The `tdm_caps_capture` contains the hardware restriction information which a capture device can handle, such as format and size. | Optional |
+| `display_get_outputs()` | Gets an output array of the backend module.TDM calls this function not only at the initialization, but also at the update time when new output is connected. The backend module must return the newly-allocated array which contains `tdm_output*` data. It is freed in the frontend. | Mandatory |
+| `display_get_fd()` | Gets the file descriptor of the backend module.The backend module can return the epoll's `fd`. | Optional |
+| `display_handle_events()` | Handles the events which happens on the `fd` of the backend module. | Optional |
+| `display_create_pp()` | Creates a `pp` object of the backend module.The backend module does not need to implement this function if the hardware does not have the memory-to-memory converting device | Optional |
+
+The output backend interface is mandatory. For more information, see [tdm_backend.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtdm.git;a=tree;h=refs/heads/tizen;hb=refs/heads/tizen).
+
+| Function | Description | |
+| ----------------------------- | ---------------------------------------- | --------- |
+| `output_get_capability()` | Gets the capabilities of a output object.TDM calls this function not only at the initialization, but also at the update time when new output is connected. The `tdm_caps_output` contains connection status, modes, available properties, and size restriction information. | Mandatory |
+| `output_get_layers()` | Gets a layer array of a output object.TDM calls this function not only at the initialization, but also at the update time when new output is connected. The backend module must return the newly-allocated array which contains `tdm_layer*` data. It is freed in the frontend. | Mandatory |
+| `output_set_property()` | Sets the property with a given ID. | Optional |
+| `output_get_property()` | Gets the property with a given ID. | Optional |
+| `output_wait_vblank()` | Waits for `VBLANK`.If this function returns `TDM_ERROR_NONE`, the backend module must call a user `vblank` handler with the user data of this function after interval `vblanks`. | Mandatory |
+| `output_set_vblank_handler()` | Sets the user `vblank` handler. | Mandatory |
+| `output_commit()` | Commits the changes for an output object.When this function is called, the backend module must apply all changes of the given output object to screen as well as the layer changes of this output. If this function returns `TDM_ERROR_NONE`, the backend module must call a user commit handler with the user data of this function after all changes of the given output object are applied. | Mandatory |
+| `output_set_commit_handler()` | Sets a user commit handler. | Mandatory |
+| `output_set_dpms()` | Sets the DPMS of an output object. | Optional |
+| `output_get_dpms()` | Gets the DPMS of an output objectn | Optional |
+| `output_set_mode()` | Sets one of the available modes of an output object. | Mandatory |
+| `output_create_capture()` | Creates a capture object of an output objectThe backend module does not need to implement this function if the hardware does not have a capture device. | Optional |
+| `output_set_status_handler()` | Sets an output connection status handler.The backend module must call the output status handler when the output connection status has been changed to let the TDM frontend know the change. | Optional |
+| `output_set_dpms_handler()` | Sets an output DPMS handler.The backend module must call the output DPMS handler when the output DPMS has been changed to let the TDM frontend know the change. | Optional |
+
+The layer backend interface is mandatory. For more information, see [tdm_backend.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtdm.git;a=tree;h=refs/heads/tizen;hb=refs/heads/tizen).
+
+| Function | Description | |
+| -------------------------- | ---------------------------------------- | --------- |
+| `layer_get_capability()` | Get the capabilities of a layer object.The backend module must implement this function. TDM calls this function not only at the initialization, but also at the update time when new output is connected. The `tdm_caps_layer` contains available formats/properties, and zpos information. | Mandatory |
+| `layer_set_property()` | Sets the property with a given ID. | Optional |
+| `layer_get_property()` | Gets the property with a given ID. | Optional |
+| `layer_set_info()` | Sets the geometry information to a layer object.The backend module applies the geometry information when the output object of a layer object is committed. | Mandatory |
+| `layer_get_info()` | Gets the geometry information to a layer object. | Mandatory |
+| `layer_set_buffer()` | Sets a TDM buffer to a layer object.The backend module shows a TDM buffer on the screen when the output object of a layer object is committed. | Mandatory |
+| `layer_unset_buffer()` | Unset a TDM buffer from a layer object.The backend module must remove the current showing buffer from screen. | Mandatory |
+| `layer_set_video_pos()` | Sets the `zpos` for a video layer object.The backend module does not need to implement this function if the backend module does not have video layers. The `zpos` of the video layer is changeable. | Optional |
+| `layer_create_capture()` | Creates a capture object of a layer object.The backend module does not need to implement this function if the hardware does not have a capture device. | Optional |
+| `layer_get_buffer_flags()` | Gets the buffer flags which the layer can support. | Optional |
+
+The `pp` backend interface is optional. For more information, see [tdm_backend.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtdm.git;a=tree;h=refs/heads/tizen;hb=refs/heads/tizen).
+
+| Function | Description |
+| ----------------------- | ---------------------------------------- |
+| `pp_destroy()` | Destroys a `pp` object. |
+| `pp_set_info()` | Sets the geometry information to a `pp` object.The backend module applies the geometry information when committed. |
+| `pp_attach()` | Attaches a source buffer and a destination buffer to a `pp` object.The backend module converts the image of a source buffer to a destination buffer when committed. The size/crop/transform information is set using the `pp_set_info()` function of `tdm_func_pp`. When done, the backend module must return the source/destination buffer using the `tdm_pp_done_handler()` function. |
+| `pp_commit()` | Commits changes for a `pp` object. |
+| `pp_set_done_handler()` | Sets a user done handler to a `pp` object.The backend module must call the `tdm_pp_done_handler()` function when image conversion is done. |
+
+The capture backend interface is optional. For more information, see [tdm_backend.h](https://review.tizen.org/gerrit/gitweb?p=platform/core/uifw/libtdm.git;a=tree;h=refs/heads/tizen;hb=refs/heads/tizen).
+
+| Function | Description |
+| ---------------------------- | ---------------------------------------- |
+| `capture_destroy()` | Destroys a capture object. |
+| `capture_set_info()` | Sets the geometry information to a capture object.The backend module applies the geometry information when committed. |
+| `capture_attach()` | Attaches a TDM buffer to a capture object.When the `capture_commit()` function is called, the backend module starts to dump a output or a layer to a TDM buffer. The backend module starts to dump an output or a layer to a TDM buffer when committed. The size/crop/transform information is set using the `capture_set_info()` function of the `tdm_func_capture`. When done, the backend module must return the TDM buffer using the `tdm_capture_done_handler()` function. |
+| `capture_commit()` | Commits changes for a capture object. |
+| `capture_set_done_handler()` | Sets a user done handler to a capture object.The backend module must call the `tdm_capture_done_handler()` function when capture operation is done. |
+
+### TDM backends[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/TDM&action=edit§ion=T-2)]
+
+There are several backends which can be referred to implement the TDM backend.
+
+| Backend | Project ([http://review.tizen.org](http://review.tizen.org/)) | Description |
+| --------------- | ---------------------------------------- | ---------------------------------------- |
+| `libtdm-drm` | [platform/adaptation/libtdm-drm](https://review.tizen.org/gerrit/gitweb?p=platform/adaptation/libtdm-drm.git;a=summary) | The backend for the target device which supports the DRM interface, such as the Tizen SDK emulatorNo PP & Capture capability |
+| `libtdm-fbdev` | [platform/adaptation/libtdm-fbdev](https://review.tizen.org/gerrit/gitweb?p=platform%2Fadaptation%2Flibtdm-fbdev.git;a=summary) | The backend for the target device which supports the FBDEV interfaceNo PP & Capture capability |
+| `libtdm-exynos` | [platform/adaptation/samsung_exynos/libtdm-exynos](https://review.tizen.org/gerrit/gitweb?p=platform%2Fadaptation%2Fsamsung_exynos%2Flibtdm-exynos.git;a=summary) | The backend for the target device which uses the `exynos` chipsetUsing the DRM interfaceHas PP & Capture capabilityUsing the exynos-specific DRM interface to support PP |
+| `libtdm-sprd` | [platform/adaptation/spreadtrum/libtdm-sprd](https://review.tizen.org/gerrit/gitweb?p=platform%2Fadaptation%2Fspreadtrum%2Flibtdm-sprd.git;a=summary) | The backend for the target device which uses the Spreadtrum chipsetUsing the sptreadtrum-specific `ioctl`Using the DRM interface to support `vblank`Has PP capability, but no capture capability |
+
+### References[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/TDM&action=edit§ion=T-3)]
+
+For detailed information about the TDM and TDM backend, see [Tizen Display Manager (TDM)](https://wiki.tizen.org/TDM).
+
+## Input Management[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI&action=edit§ion=T-3)]
+
+The input manager supports for a `libinput` based input device back-end. `libinput` is a common input library for wayland compositor. With `libinput`, the input stack is simpler without the Xorg input drivers. Input is not a HAL component from Tizen 3.0.
+
+[](https://wiki.tizen.org/File:Tizen_3.0_Input.png)
+
+### libinput[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/Input&action=edit§ion=T-1)]
+
+The `libinput` library handles input devices for display servers and other applications that need to directly deal with input devices.
+
+- Device detection
+- Device handling
+- Input device event processing
+- Scaling touch coordinates
+- Generating pointer events from touchpads
+- Pointer acceleration
+
+For more information, see the [libinput wiki](https://freedesktop.org/wiki/Software/libinput/).
+
+### libevdev[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/Input&action=edit§ion=T-2)]
+
+The `libevdev` library handles evdev kernel devices. It abstracts the evdev ioctls through type-safe interfaces and provides functions to change the appearance of the device. For more information, see [https://en.wikipedia.org/wiki/Evdev](https://en.wikipedia.org/wiki/Evdev).
+
+### mtdev[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/Input&action=edit§ion=T-3)]
+
+The `mtdev` stand-alone library transforms all variants of kernel MT events to the slotted type B protocol. For more information, see [http://www.linuxfromscratch.org/blfs/view/svn/general/mtdev.html](http://www.linuxfromscratch.org/blfs/view/svn/general/mtdev.html).
+
+### libinput backends[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/Input&action=edit§ion=T-4)]
+
+`libinput: platform/upstream/libinput`
+
+## OpenGL[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI&action=edit§ion=T-4)]
+
+This document describes the essential elements of Tizen's platform-level graphics architecture related to OpenGL ES and EGL, and how it is used by the application framework and the display server. The focus is on how graphical data buffers move through the system.
+
+Tizen platform requires the OpenGL ES driver for the acceleration of the Wayland display server and `wayland-egl` client. This platform demands OpenGL ES and EGL driver which is implemented by the Tizen EGL Porting Layer.
+
+### Tizen OpenGL ES and EGL Architecture[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-1)]
+
+The following figure illustrates the Tizen OpenGL ES and EGL architecture.
+
+[](https://wiki.tizen.org/File:OPENGLES_STACK.png)
+
+- CoreGL
+
+An injection layer of OpenGL ES that provides the following capabilities:
+
+- Support for driver-independent optimization (FastPath)
+- EGL/OpenGL ES debugging
+- Performance logging
+- Supported versions
+ - EGL 1.4
+ - OpenGL ES 1.1, 2.0, 3.0, 3.1
+
+CoreGL loads the manufacturer's OpenGL ES driver from the `/usr/lib/driver` directory. CoreGL provides the `libEGL.so`, `libGLESv1_CM.so`, and `libGLESvs.so` driver files in the `/usr/lib` directory.
+
+- GPU Vendor GL / EGL driver
+
+The Tizen platform demands that the GPU vendor implements the GL and EGL driver using `libtpl-egl`. The GPU vendor GL / EGL driver must be installed in the following path:
+
+| Library path | File |
+| ----------------- | ---------------------------------------- |
+| `/usr/lib/driver` | `libEGL.so``libGLESv1_CM.so``libGLESv2.so` |
+
+### Tizen Porting Layer (TPL) for EGL[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-2)]
+
+TPL-EGL is an abstraction layer for surface and buffer management on Tizen platform. It is used for implementation of the EGL platform functions.
+
+[](https://wiki.tizen.org/File:Tpl_architecture.png)
+
+The background for the Tizen EGL Porting Layer for EGL is in various window system protocols in Tizen. There was a need for separating common layer and backend.
+
+Tizen uses the Tizen Porting Layer for EGL, as the TPL-EGL APIs prevents burdens of the EGL porting on various window system protocols. The GPU GL Driver’s Window System Porting Layer can be implemented by TPL-EGL APIs which are the corresponding window system APIs. The TBM, Wayland, and GBM backends are supported.
+
+### Tizen Porting Layer for EGL Object Model[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-3)]
+
+TPL-EGL provides interfaces based of object driven model. Every TPL-EGL object can be represented as a generic `tpl_object_t`, which is reference-counted and provides common functions. Currently, display and surface types of TPL-EGL objects are provided. Display, like normal display, represents a display system which is usually used for connection to the server. Surface corresponds to a native surface like `wl_surface`. A surface might be configured to use N-buffers, but is usually double-buffered or triple-buffered. Buffer is actually something to render on, usually a set of pixels or a block of memory. For these 2 objects, the Wayland, GBM, TBM backend are defined, and they are corresponding to their own window systems. This means that you do not need to care about the window systems.
+
+#### TPL-EGL Core Object[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-4)]
+
+- TPL-EGL Object
+
+Base class for all TPL-EGL objects
+
+- TPL-EGL Display
+
+Encapsulates the native display object (`Display *, wl_display`) Like a normal display, represents a display system which is usually used for connection to the server, scope for other objects.
+
+- TPL-EGL Surface
+
+Encapsulates the native drawable object (`Window, Pixmap, wl_surface`) The surface corresponds to a native surface, such as `tbm_surface_queue` or `wl_surface`. A surface can be configured to use N-buffers, but they are usually double-buffered or triple-buffered.
+
+#### TPL-EGL Objects and Corresponding EGL Objects[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-5)]
+
+Both TPL-EGL and vendor GLES/EGL driver handles the `tbm_surface` as TPL surface's corresponding buffer. It is represented by the `TBM_Surface` part in the following figure.
+
+[](https://wiki.tizen.org/File:Relationship_TPL_EGL_Gray.png)
+
+The following figure illustrates the GLES drawing API flow.
+
+[](https://wiki.tizen.org/File:GLES_API_FLOW_GRAY.png)
+
+#### TPL-EGL Frontend API[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-6)]
+
+##### TPL-EGL Object[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-7)]
+
+This is the base class for all TPL-EGL objects. It provides common functionalities to all TPL-EGL objects.
+
+| Function | Description |
+| ---------------------------- | ---------------------------------------- |
+| `tpl_object_reference()` | Increases the reference count of a TPL-EGL object. All TPL-EGL objects are reference-counted. They have reference count 1 on creatation. When the reference count drops to 0, the object is freed. |
+| `tpl_object_unreference()` | Decreases the reference count and destroys the object if it becomes 0. |
+| `tpl_object_get_reference()` | Gets the reference count of the given TPL-EGL object. |
+| `tpl_object_get_type()` | Gets the type of the object (display, surface, or buffer). |
+| `tpl_object_set_user_data()` | Sets the user data to a TPL-EGL object. Users want to relate some data with a TPL-EGL object. This function provides registering a pointer to such data which can be retrieved later using the `tpl_object_get_user_data()`function. The key is the pointer value itself as a key. |
+| `tpl_object_get_user_data()` | Gets the registered user data of a TPL-EGL object. |
+
+##### TPL-EGL Display[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-8)]
+
+Encapsulates the native display object (`Display *, wl_display`). Any other objects created from TPL-EGL Display inherit its backend type.
+
+| Function | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `tpl_display_create()` | Creates the TPL-EGL display object for the given native display. Creates a TPL-EGL display if there is no existing TPL-EGL display for the given native display. If given `NULL` for `native_dpy`, this function returns the default display. |
+| `tpl_display_get()` | Gets the TPL-EGL display object for the given native display. If thereis an existing TPL-EGL display for the given native display, it returns the TPL-EGL display. |
+| `tpl_display_get_native_handle()` | Gets the native display handle which the given TPL-EGL display is created for. |
+| `tpl_display_query_config()` | Queries the supported pixel formats for the given TPL-EGL display. You might want to know what pixel formats are available on the given display. This function is used to query such available pixel formats. Give `TPL_DONT_CARE` to parameters for size values if any values are acceptable. |
+| `tpl_display_filter_config()` | Filters the configuration according to a given TPL-EGL display. This function modifies current config specific to the current given TPL-EGL display. |
+| `tpl_display_get_native_window_info()` | Queries information on the given native window. |
+| `tpl_display_get_native_pixmap_info()` | Queries information on the given native pixmap. |
+| `tpl_display_get_buffer_from_native_pixmap()` | Gets the native buffer from the given native pixmap. |
+
+##### TPL-EGL Surface[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-9)]
+
+Encapsulates the native drawable object (`Window, Pixmap, wl_surface`). Its main features are retrieving the buffer for a frame and posting the surface to a screen.
+
+| Function | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `tpl_surface_create()` | Creates a TPL-EGL surface for the given native surface. |
+| `tpl_surface_get_display()` | Gets the TPL-EGL display where the given TPL-EGL surface was created from. |
+| `tpl_surface_get_native_handle()` | Gets the native surface handle of the given TPL-EGL surface. |
+| `tpl_surface_get_type()` | Gets the type of the given TPL surface. |
+| `tpl_surface_get_size()` | Gets the current size of the given TPL-EGL surface. Size of a surface can change when a user resizes window or the server resizes it. TPL-EGL updates the size information every time when a buffer is queried using the `tpl_surface_dequeue_buffer()` function. Consider that there can still be mismatch between actual surface size and the cached one. |
+| `tpl_surface_validate()` | Validates the current frame of the given TPL-EGL surface. Call this function before getting the actual final render target buffer. Calling the `tpl_surface_dequeue_buffer()` function after calling this function can give different output with previous one. Buffer returned after calling this function is guaranteed to be not changing. |
+| `tpl_surface_dequeue_buffer()` | Gets the buffer of the current frame for the given TPL-EGL surface. This function returns buffer of the current frame. Depending on backend, communication with the server can be required. Returned buffers are used for rendering the target to draw the current frame. Returned buffers are valid until the next `tpl_surface_dequeue_buffer()` function call. If the `tpl_surface_validate()` function returns `TPL_FALSE`, the previously returned buffers must no longer be used. This function is called again before drawing, and it returns a valid buffer. |
+| `tpl_surface_enqueue_buffer()` | Posts a given `tbm_surface`. This function request display server to post a frame. This is the function which can enqueue a buffer to the `tbm_surface_queue`. Make sure this function is called exactly once for a frame. Scheduling post calls on a separate thread is recommended. |
+| `tpl_surface_enqueue_buffer_with_damage()` | Posts a given `tbm_surface` with region of damage. Damage information is used for reducing number of pixels composited in the compositor. Setting the `num_rects` to 0 or `rects` to `NULL` means entire area is damaged. This function request displays server to post a frame. This function is identical with the `tpl_surface_enqueue_buffer()` function except for delivering the damage information for updating. Make sure this function is called exactly once for a frame. Scheduling post calls on a separate thread is recommended. |
+| `tpl_surface_set_post_interval()` | The frame interval ensures that only a single frame is posted within the specified vsync intervals. When a frame ends, the frame interval is set to the surface's current interval. |
+| `tpl_surface_get_post_interval()` | Get frame interval of the given TPL-EGL surface. |
+
+The following code snippet shows a simple example of the Tizen Porting Layer.
+
+```
+dpy = tpl_display_create(...);
+sfc = tpl_surface_create(dpy, ...);
+
+while (1)
+{
+ buf = tpl_surface_dequeue_buffer(sfc);
+
+ /* Draw something */
+
+ tpl_surface_enqueue_buffer(sfc, buf);
+}
+
+```
+
+In the GPU vendor driver, the "Draw something" part is what the GPU frame builder does. TPL-EGL exposes the native platform buffer identifiers and managers so that the buffer can be used in other modules. Currently, `dma_buf/DRM` is supported for these of purposes. EGL porting layer calls TPL-EGL functions to do what it is requested, and gives the result to the GPU vendor driver. TPL-EGL does all the protocol dependent actions. Such protocol dependent part can be well-separated into TPL-EGL backends. Also, TPL-EGL backend can be configured at runtime. You can specify which type of backend to use when initializing a display object.
+
+#### TPL-EGL and Wayland Server and Client[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-10)]
+
+[](https://wiki.tizen.org/File:Libtpl-egl-module_diagram.png)
+
+Tizen uses the `wl_tbm` protocol instead of `wl_drm`. The `wl_tbm` protocol is born for sharing the buffer(`tbm_surface`) between the `wayland_client` and `wayland_server`. Although the `wayland_tbm_server_init` and `wayland_tbm_client_init` pair is a role for the `eglBindWaylandDisplayWL`, the EGL driver is required to implement the entrypoints for the `eglBindWaylandDisplayWL` and `eglUnbindWaylandDisplayWL` as dummy. For more information, see [https://cgit.freedesktop.org/mesa/mesa/tree/docs/specs/WL_bind_wayland_display.spec](https://cgit.freedesktop.org/mesa/mesa/tree/docs/specs/WL_bind_wayland_display.spec).
+
+#### Buffer Flow Between the Wayland Server and GLES/EGL Driver[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-11)]
+
+The following figure shows the buffer flow between wayland server and GLES/EGL Driver. And passed buffer's type is `tbm_surface`.
+
+[](https://wiki.tizen.org/File:Libtpl-egl_buffer_flow.png)
+
+### Project Git Repository[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-12)]
+
+| Project | Repository | Description |
+| --------------- | ---------------------------------------- | ---------------------------------------- |
+| `libtpl-egl` | `platform/core/uifw/libtpl-egl` | Tizen Porting Layer for EGL |
+| `libtbm` | `platform/core/uifw/libtbm` | The library for the Tizen Buffer Manager |
+| `coregl` | `platform/core/uifw/coregl` | An injection layer of OpenGL ES / EGL |
+| `wayland-tbm` | `platform/core/uifw/wayland-tbm` | Wayland tbm is a protocol for graphics memory management for Tizen |
+| `emulator-yagl` | `platform/adaptation/emulator/emulator-yagl` | OpenGL ES / EGL driver for the emulator |
+| `tpl-novice` | `platform/core/uifw/ws-testcase` | Novice test framework for TPL |
+
+### libtpl-egl Reference Driver[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-13)]
+
+The Emulator YAGL (OpenGLES / EGL driver for the emulator) is implemented by `libtpl-egl`.
+
+The following commit explains how to port the driver with `libtpl-egl` from the traditional drm-based driver.
+
+- Porting YAGL to the Tizen platform [https://review.tizen.org/gerrit/#/c/67921/](https://review.tizen.org/gerrit/#/c/67921/)
+
+### Test and Verify the OpenGL ES Driver[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Graphics_and_UI/OpenGL&action=edit§ion=T-14)]
+
+The Khronos OpenGL ES CTS supports the `wayland-egl`. `libtpl-egl` has a test case for the `libtpl-egl`. The `ws-testcase`'s `tpl-novice` has sample code for the `libtpl-egl`.
+
+# Multimedia[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=10)]
+
+## Camera[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-1)]
+
+The Multimedia camcorder framework controls the GStreamer camera plugin to capture camera data from the device. The kernel interfaces to control the camera device can be different for different chipsets, so the camera HAL (Hardware Abstraction Layer) used by camera plugin is provided and it must be implemented specifically for each chipset. Each configuration file contains its own specific hardware dependent information. The Multimedia Camcorder framework reads and parses the information in these configuration files.
+
+[](https://wiki.tizen.org/File:Tizen3.0_MMFWCamcorder.png)
+
+- Camera Source Plugin for GStreamer
+
+Gets camera data (preview or captured image) and sets various camera commands through camera HAL interface
+
+- Camera HAL
+
+Common interface to control camera device on various shipsets and used by camera source plugin.
+
+- Configuration Files
+
+There are 3 config files for the Multimedia Camcorder framework. They are provided by `mmfw- sysconf-xxx`.
+
+- `mmfw_camcorder.ini`
+
+
+
+
+- `mmfw_camcorder_dev_video_pri.ini`
+
+
+
+
+- `mmfw_camcorder_dev_video_sec.ini`
+
+
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-2)]
+
+#### GStreamer Camera Plugin[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-3)]
+
+The default reference camera source plugin which uses the camera HAL interface is provided.
+
+#### Camera HAL[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-4)]
+
+The `mm-hal-interface` package provides the header file of the camera HAL.
+
+- Repository path: `platform/core/multimedia/mm-hal-interface`
+- File name: `tizen-camera.h`
+
+##### Major Functions[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-5)]
+
+The following table lists the functions related to initialization and deinitialization.
+
+| Prototype | Description |
+| ---------------------------------------- | ------------------------------------ |
+| `int camera_init(void **camera_handle)` | Initializes new camera HAL handle. |
+| `int camera_deinit(void *camera_handle)` | Deinitializes the camera HAL handle. |
+
+The following table lists the functions related to open and close camera device.
+
+| Prototype | Description |
+| ---------------------------------------- | ------------------------- |
+| `int camera_open_device(void *camera_handle, int device_index)` | Opens the camera device. |
+| `int camera_close_device(void *camera_handle)` | Closes the camera device. |
+
+The following table lists the functions related to getting device information.
+
+| Prototype | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `int camera_get_device_list(void *camera_handle, camera_device_list_t *device_list)` | Gets the camera device list. |
+| `int camera_add_message_callback(void *camera_handle, camera_message_cb callback, void *user_data, uint32_t *cb_id)` | Registers a callback function to be called to send a message by the camera HAL. |
+| `int camera_remove_message_callback(void *camera_handle, uint32_t cb_id)` | Unregisters a callback function. |
+
+The following table lists the functions related to preview and capture.
+
+| Prototype | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `int camera_set_preview_stream_format(void *camera_handle, camera_format_t *format)` | Sets the format of the preview stream.`typedef struct camera_format { camera_pixel_format_t stream_format; camera_resolution_t stream_resolution; uint32_t stream_fps; camera_rotation_t stream_rotation; camera_pixel_format_t capture_format; camera_resolution_t capture_resolution; uint32_t capture_quality;} camera_format_t;` |
+| `int camera_get_preview_stream_format(void *camera_handle, camera_format_t *format)` | Gets the format of the preview stream. |
+| `int camera_start_preview(void *camera_handle, camera_preview_frame_cb callback, void *user_data)` | Starts the preview frames on the screen.`typedef int (*camera_preview_frame_cb)(camera_buffer_t *buffer, camera_metadata_t *meta, void *user_data);` |
+| `int camera_stop_preview(void *camera_handle)` | Stops the preview frames. |
+| `int camera_release_preview_buffer(void *camera_handle, int buffer_index)` | Releases the preview buffer. The preview buffer must be released with this function after using it. |
+| `int camera_start_auto_focus(void *camera_handle)` | Starts the camera auto focusing operation. |
+| `int camera_stop_auto_focus(void *camera_handle)` | Stops the camera auto focusing operation. |
+| `int camera_start_capture(void *camera_handle, camera_capture_cb callback, void *user_data)` | Starts capturing still images.`typedef int (*camera_capture_cb)(camera_buffer_t *main, camera_buffer_t *postview, camera_buffer_t *thumbnail, void *user_data);` |
+| `int camera_stop_capture(void *camera_handle)` | Stops capturing still images. |
+
+The following table lists the functions related to video recording.
+
+| Prototype | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `int camera_set_video_stream_format(void *camera_handle, camera_format_t *format)` | Sets the format of the video stream for recording. |
+| `int camera_get_video_stream_format(void *camera_handle, camera_format_t *format)` | Gets the format of the video stream for recording. |
+| `int camera_start_record(void *camera_handle, camera_video_frame_cb callback, void *user_data)` | Starts the video frame for recording.`typedef int (*camera_video_frame_cb)(camera_buffer_t *buffer, camera_metadata_t *meta, void *user_data);` |
+| `int camera_stop_record(void *camera_handle)` | Stops the video frame. |
+| `int camera_release_video_buffer(void *camera_handle, int buffer_index)` | Releases the video buffer. The video buffer must be released with this function after using it. |
+
+The following table list the functions related to controlling the camera device.
+
+| Prototype | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `int camera_set_command(void *camera_handle, int64_t command, void *value)` | Sets various commands and values to control the camera device.`#define CAMERA_COMMAND_BASE ((int64_t)1)#define CAMERA_COMMAND_WHITE_BALANCE ((int64_t)(CAMERA_COMMAND_BASE << 1))#define CAMERA_COMMAND_ISO ((int64_t)(CAMERA_COMMAND_BASE << 2))#define CAMERA_COMMAND_CONTRAST ((int64_t)(CAMERA_COMMAND_BASE << 3))#define CAMERA_COMMAND_SATURATION ((int64_t)(CAMERA_COMMAND_BASE << 4))#define CAMERA_COMMAND_HUE ((int64_t)(CAMERA_COMMAND_BASE << 5))#define CAMERA_COMMAND_SHARPNESS ((int64_t)(CAMERA_COMMAND_BASE << 6))#define CAMERA_COMMAND_EFFECT ((int64_t)(CAMERA_COMMAND_BASE << 7))#define CAMERA_COMMAND_SCENE_MODE ((int64_t)(CAMERA_COMMAND_BASE << 8))#define CAMERA_COMMAND_EXPOSURE_MODE ((int64_t)(CAMERA_COMMAND_BASE << 9))#define CAMERA_COMMAND_EXPOSURE ((int64_t)(CAMERA_COMMAND_BASE << 10))#define CAMERA_COMMAND_ROTATION ((int64_t)(CAMERA_COMMAND_BASE << 11))#define CAMERA_COMMAND_FLIP ((int64_t)(CAMERA_COMMAND_BASE << 12))#define CAMERA_COMMAND_FOCUS_MODE ((int64_t)(CAMERA_COMMAND_BASE << 13))#define CAMERA_COMMAND_FOCUS_RANGE ((int64_t)(CAMERA_COMMAND_BASE << 14))#define CAMERA_COMMAND_SHOT_MODE ((int64_t)(CAMERA_COMMAND_BASE << 15))#define CAMERA_COMMAND_ANTI_SHAKE ((int64_t)(CAMERA_COMMAND_BASE << 16))#define CAMERA_COMMAND_FOCUS_AREA ((int64_t)(CAMERA_COMMAND_BASE << 17))#define CAMERA_COMMAND_DIGITAL_ZOOM ((int64_t)(CAMERA_COMMAND_BASE << 18))#define CAMERA_COMMAND_OPTICAL_ZOOM ((int64_t)(CAMERA_COMMAND_BASE << 19))#define CAMERA_COMMAND_RECORDING_HINT ((int64_t)(CAMERA_COMMAND_BASE << 20))#define CAMERA_COMMAND_WDR ((int64_t)(CAMERA_COMMAND_BASE << 21))#define CAMERA_COMMAND_SHUTTER_SPEED ((int64_t)(CAMERA_COMMAND_BASE << 22))#define CAMERA_COMMAND_FLASH_MODE ((int64_t)(CAMERA_COMMAND_BASE << 23))#define CAMERA_COMMAND_FACE_DETECTION ((int64_t)(CAMERA_COMMAND_BASE << 24))` |
+| `int camera_get_command(void *camera_handle, int64_t command, void *value)` | Gets the current value of the command. |
+| `int camera_set_batch_command(void *camera_handle, camera_batch_command_control_t *batch_command, int64_t *error_command)` | Sets a set of commands.`typedef struct camera_batch_command_control { /* Flag for modified command */ int64_t command_set_flag; /* Value list */ camera_white_balance_t white_balance; int iso; int contrast; int saturation; int hue; int sharpness; camera_effect_t effect; camera_scene_mode_t scene_mode; camera_exposure_mode_t exposure_mode; int exposure; camera_rotation_t rotation; camera_flip_t flip; camera_focus_mode_t focus_mode; camera_focus_range_t focus_range; camera_exposure_mode_t shot_mode; int anti_shake; camera_rectangle_t focus_area; int digital_zoom; int optical_zoom; int recording_hint; int wdr; camera_flash_mode_t flash_mode; camera_face_detection_t face_detection;} camera_batch_command_control_t;` |
+
+### Configuration[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-6)]
+
+Read the keyword and its value from the file. Recognize the categories by using the keyword list of the MSL camcorder, and save the member structure of MSL camcorder. Later, these values are used as attribute values or some other operation. The permission of this file is read-only to make sure the configuration files are read once before creating camcorder. Use a semicolon (“;”) to add comments in the config file.
+
+The following table shows the description of the `mmfw_camcorder.ini` file.
+
+| Category | Entry | Description |
+| ---------------------------------------- | ---------------------------------------- | ---------------------------------------- |
+| GeneralGeneral setting or information | `SyncStateChange` | The API running type. It must be 1 (`TRUE`). |
+| `ModelName` | Model name of target | |
+| Video inputSetting list related to video input | `UseConfCtrl` | Sets whether to use the configuration file. It must be 1 (`TRUE`). |
+| `ConfCtrlFile0` or `1` | The name of the setting file to control the camera device. | |
+| `VideosrcElement` | The source plugin which obtains the camera input buffer from the device | |
+| `UseZeroCopyFormat` | Sets whether to use the zero copy format. | |
+| `DeviceCount` | The number of camera device | |
+| `SupportMediaPacketPreviewCb` | Sets whether the camera API supports media packet preview callback on the target. | |
+| Audio inputSetting list related to audio input | `AudiosrcElement` | Audio source plugin, which obtains audio for the camcorder or voice recorder |
+| `AudiomodemsrcElement` | Audio source plugin which obtains audio for call recording | |
+| Video inputSetting list related to video output | `DisplayDevice` | Supported output device list and the default value |
+| `Videosink` | Supported output surface list and the default value | |
+| `VideosinkElementOverlay` | Plugin name for the Overlay output surface and the property setting list | |
+| `VideosinkElementEvas` | Plugin name for the Evas output surface and the property setting list | |
+| `VideosinkElementGL` | Plugin name for the GL output surface and the property setting list. | |
+| `VideosinkElementNULL` | Plugin name for the `NULL` surface and the property setting list. | |
+| Video encoder | Defines the video encoder list for video recording | |
+| Audio encoder | Defines the audio encoder list for AV recording or voice recording | |
+| CaptureSetting list related to image capture | `UseEncodebin` | Sets whether to use the `encodebin` to capture the image. It is recommended to keep this value as 0 (`FALSE`). |
+| Record | Setting value list for each recording mode. It is recommend to keep the values of the example config file. | |
+| Mux | The mux plugin list related with the file container. | |
+
+The following table shows the description of the `mmfw_camcorder_dev_video_pri.ini` file for the primary camera (usually the rear main camera) and the `mmfw_camcorder_dev_video_sec.ini` file for the secondary camera (usually the front camera).
+
+| Category | Entry | Description |
+| ---------------------------------- | ---------------------------------------- | ---------------------------------------- |
+| CameraInformation about the camera | `InputIndex` | Camera number to select (primary or secondary) |
+| `DeviceName` | Name of the camera module | |
+| `PreviewResolution` | A list of all supported preview resolutions the user can set, as well as the default values for this camera device. | |
+| `CaptureResolution` | A list of all supported capture resolutions the user can set, as well as the default values for this camera device. | |
+| `VideoResolution` | A list of all supported video resolutions the user can set, as well as the default value for this camera device. | |
+| `FPS0 ~ 9` | A list of all supported FPS (Frame Per Second) by preview resolution settings the user can use, as well as the default values for this camera device. | |
+| `PictureFormat` | A list of all supported preview formats a user can set, as well as the default values for this camera device. | |
+| `RecommendDisplayRotation` | Default display rotation value for displaying camera input. | |
+| `RecommendPreviewFormatCapture` | Recommended preview format for capturing images. | |
+| `RecommendPreviewFormatRecord` | Recommended preview format for recording. | |
+| `RecommendPreviewResolution` | Recommended preview resolution by ratio of preview resolution. | |
+| `FacingDirection` | The facing direction of camera device. | |
+| StrobeCamera flash settings | `StrobeMode` | Supported strobe mode and default values. This is converted to a real value and used in the kernel internally. |
+| EffectEffect settings | Brightness | Supported range of brightness and default values. |
+| Contrast | Supported range of contrast and default values. | |
+| Saturation | Supported range of saturation and default values. | |
+| Sharpness | Supported range of sharpness and default values. | |
+| Whitebalance | Supported white balance list and default values. This is converted to real value used in kernel internally. | |
+| ColorTone | Supported color tone list and default values. This is converted to a real value and used in the kernel internally. | |
+| WDR | Supported Wide Dynamic Range mode list and default values. This is converted to a real value and used in the kernel internally. | |
+| PhotographCamera shooting settings | `DigitalZoom` | Supported range of digital zoom level and default values. |
+| `OpticalZoom` | Supported range of optical zoom level and default values. | |
+| `FocusMode` | Supported focus mode list and default value. This is converted to a real value and used in the kernel internally. | |
+| `AFType` | Supported AUTO focus mode list and default values. This is converted to a real value and used in the kernel internally. | |
+| `AEType` | Supported AUTO Exposure mode list and default value. This is converted to a real value and used in the kernel internally. | |
+| `ExposureValue` | Supported range of exposure value and default values. | |
+| ISO | Supported ISO list and default value. This is converted to a real value and used in the kernel internally. | |
+| `ProgramMode` | Supported program mode (scene mode) list and default value. This is converted to a real value and used in the kernel internally. | |
+| `AntiHandshake` | Supported anti-hand shake mode list and default value. This is converted to a real value and used in the kernel internally. | |
+| CaptureImage capture settings | `OutputMode` | Supported capture format list and default values. |
+| `JpegQuality` | Supported range of JPEG quality and default values. | |
+| `MultishotNumber` | Supported range of multi shot count and default values. | |
+| `SensorEncodedCapture` | Whether the camera device supports encoded capture format(EX:JPEG) or not. | |
+| `SupportHDR` | Supported HDR mode list and default value. | |
+| `SupportZSL` | Whether the camera device supports zero shutter lag capture or not. | |
+| DetectDetect function settings | `DetectMode` | Supported detect mode list and default values. |
+
+### References[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-7)]
+
+- Driver Configuration
+
+Set the kernel `.config` values for the camera:
+
+```
+CONFIG_VIDEO_DEV = y
+CONFIG_VIDEO_SAMSUNG = y
+CONFIG_VIDEO_SAMSUNG_V4L2 = y
+CONFIG_VIDEO_FIMC = y
+CONFIG_VIDEO_FIMC_MMAP_OUTPUT_CACHE = y
+CONFIG_VIDEO_FIMC_MIPI = y
+CONFIG_VIDEO_FIMG2D = y
+CONFIG_VIDEO_JPEG = y
+CONFIG_VIDEO_MFC5X = y
+
+```
+
+- Kernel Node
+
+```
+For Camera: /dev/video1
+Other CAMIF interfaces: /dev/video(0-3)
+
+```
+
+- GStreamer
+
+For more information about GStreamer, see [http://gstreamer.freedesktop.org/documentation/](http://gstreamer.freedesktop.org/documentation/) and [http://gstreamer.freedesktop.org/data/doc/gstreamer/head/pwg/html/index.html](http://gstreamer.freedesktop.org/data/doc/gstreamer/head/pwg/html/index.html).
+
+- V4L2
+
+For more information about V4L2, see [http://v4l2spec.bytesex.org/spec-single/v4l2.html](http://v4l2spec.bytesex.org/spec-single/v4l2.html).
+
+## Radio[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-8)]
+
+The radio interface part of the multimedia framework supports APIs to implement the following FM radio features.
+
+- Tune a frequency
+- Get and set a frequency
+- Scan all available frequencies
+- Seek up and down
+- Get the frequency signal
+
+[](https://wiki.tizen.org/File:Radio.png)
+
+The interfaces to control the radio device are different to each other. Therefore, Tizen provides the Radio Hardware Abstraction Layer (HAL) to control various radio devices with a common interface. With the common interface, you can control the radio device on various chipsets used by the `libmm-radio`.
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-9)]
+
+The OAL interface for FM radio is the radio HAL interfaces.
+
+#### Radio HAL[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-10)]
+
+The `mm-hal-interface` package provides the radio HAL header file.
+
+- Repository path: `platform/core/multimedia/mm-hal-interface`
+- File name: `tizen-radio.h`
+
+The OAL interface for FM radio is the [Linux](https://wiki.tizen.org/Linux) kernel V4L2 interface. The radio module directly uses the V4L2 `ioctls` to perform various radio hardware configurations.
+
+The reference section explains the V4L2 interfaces used by the FM radio interface.
+
+#### Major Functions[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-11)]
+
+The following table lists the functions related to initialization and deinitialization.
+
+| Prototype | Description |
+| ---------------------------------------- | ----------------------------------- |
+| `radio_error_t radio_init(void **radio_handle)` | Initializes new radio HAL handle. |
+| `radio_error_t radio_deinit(void *radio_handle)` | Deinitializes the radio HAL handle. |
+
+The following table lists the functions related to preparing and unpreparing the radio device.
+
+| Prototype | Description |
+| ---------------------------------------- | --------------------------- |
+| `radio_error_t radio_prepare_device(void *radio_handle)` | Prepare the radio device. |
+| `radio_error_t radio_unprepare_device(void *radio_handle)` | Unprepare the radio device. |
+
+The following table lists the functions related to opening and closing the radio device.
+
+| Prototype | Description |
+| ---------------------------------------- | ------------------------ |
+| `radio_error_t radio_open_device(void *radio_handle)` | Opens the radio device. |
+| `radio_error_t radio_close_device(void *radio_handle)` | Closes the radio device. |
+
+The following table lists the functions related to starting and stopping the radio device.
+
+| Prototype | Description |
+| ---------------------------------------- | ------------------------ |
+| `radio_error_t radio_start (void *radio_handle)` | Starts the radio device. |
+| `radio_error_t radio_stop (void *radio_handle)` | Stops the radio device. |
+
+The following table lists the functions related to setting and getting the frequency.
+
+| Prototype | Description |
+| ---------------------------------------- | ------------------------- |
+| `radio_error_t radio_get_frequency(void *radio_handle, uint32_t *frequency)` | Gets the radio frequency. |
+| `radio_error_t radio_set_frequency(void *radio_handle, uint32_t frequency)` | Sets the radio frequency. |
+
+The following table lists the functions related to seeking for channels.
+
+| Prototype | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `radio_error_t radio_seek(void *radio_handle, radio_seek_direction_type_t direction)` | Seeks (up or down) the effective frequency of the radio, asynchronously`typedef enum radio_seek_direction_type RADIO_SEEK_DIRECTION_UP, /* Seek upward */ RADIO_SEEK_DIRECTION_DOWN /* Seek downward */} radio_seek_direction_type_t;` |
+
+The following table lists the functions related to muting and unmuting the radio device.
+
+| Prototype | Description |
+| ---------------------------------------- | ------------------ |
+| `radio_error_t radio_mute(void *radio_handle)` | Mutes the radio. |
+| `radio_error_t radio_unmute(void *radio_handle)` | Unmutes the radio. |
+
+The following table lists the functions related to setting and getting the volume.
+
+| Prototype | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `radio_error_t radio_get_volume(void *radio_handle, float *volume)` | Gets the radio's current volume. |
+| `radio_error_t radio_set_volume(void *radio_handle, float volume)` | Sets the current radio's volume. |
+| `radio_error_t radio_set_media_volume(void *radio_handle, uint32_t level)` | Sets the current media volume level(system media volume). |
+
+The following table lists the functions related to getting the signal strength.
+
+| Prototype | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `radio_error_t radio_set_media_volume(void *radio_handle, uint32_t level);` | Gets the current signal strength of the radio. |
+
+### References[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-12)]
+
+- Kernel Node
+
+```
+For Radio: /dev/radio0
+
+```
+
+## Audio[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-13)]
+
+The following figure illustrates the different audio layers.
+
+[](https://wiki.tizen.org/File:Audio.png)
+
+- PulseAudio
+ - PulseAudio is a sound server accepting sound input from 1 or more sources and redirecting it to 1 or more sinks. PulseAudio has the following features:
+ - Software mixing of multiple audio streams
+ - Support for multiple audio sources and sinks
+ - An extensible plugin architecture with support for loadable modules
+ - Low-latency operation
+ - Support external devices such as Bluetooth audio and USB audio devices.
+ - Pulseaudio interacts with AudioHAL interfaces to support various type of devices.
+- Audio HAL
+ - Predefined interfaces for Audio Hardware Abstraction Layer (HAL)
+ - Interface includes the following categories: volume, route, stream, pcm
+- Configuration Files
+ - Configurations for running Pulseaudio and Audio Systems which can be modified without code changes.
+ - pulseaudio configurations (daemon.conf, client.conf, system.pa, etc.)
+ - stream / device configuration (stream-map.json, device-map.json)
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-14)]
+
+The following table lists the audio HAL interfaces.
+
+| Interface | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `audio_return_t audio_init(void **audio_handle)` | Initializes the audio HAL handle. |
+| `audio_return_t audio_deinit(void *audio_handle)` | De-initializes the audio HAL handle. |
+| `audio_return_t audio_get_volume_level_max(void *audio_handle, audio_volume_info_t *info, uint32_t *level)` | Gets the maximum volume level supported for a particular volume information. |
+| `audio_return_t audio_get_volume_level(void *audio_handle, audio_volume_info_t *info, uint32_t *level)` | Gets the volume level specified for a particular volume information. |
+| `audio_return_t audio_set_volume_level(void *audio_handle, audio_volume_info_t *info, uint32_t level)` | Sets the volume level specified for a particular volume information. |
+| `audio_return_t audio_get_volume_value(void *audio_handle, audio_volume_info_t *info, uint32_t level, double *value)` | Gets the volume value specified for a particular volume information and level. |
+| `audio_return_t audio_get_volume_mute(void *audio_handle, audio_volume_info_t *info, uint32_t *mute)` | Gets the volume mute specified for a particular volume information. |
+| `audio_return_t audio_set_volume_mute(void *audio_handle, audio_volume_info_t *info, uint32_t mute)` | Sets the volume mute specified for a particular volume information. |
+| `audio_return_t audio_update_route(void *audio_handle, audio_route_info_t *info)` | Updates the audio routing according to audio route information. |
+| `audio_return_t audio_update_route_option(void *audio_handle, audio_route_option_t *option)` | Updates audio routing option according to audio route option. |
+| `audio_return_t audio_notify_stream_connection_changed(void *audio_handle, audio_stream_info_t *info, uint32_t is_connected)` | Notifies when a stream is connected and disconnected. |
+| `audio_return_t audio_pcm_open(void *audio_handle, void **pcm_handle, uint32_t direction, void *sample_spec, uint32_t period_size, uint32_t periods)` | Opens a PCM device. |
+| `audio_return_t audio_pcm_start(void *audio_handle, void *pcm_handle)` | Starts a PCM device. |
+| `audio_return_t audio_pcm_stop(void *audio_handle, void *pcm_handle)` | Stops a PCM device. |
+| `audio_return_t audio_pcm_close(void *audio_handle, void *pcm_handle)` | Closes a PCM device. |
+| `audio_return_t audio_pcm_avail(void *audio_handle, void *pcm_handle, uint32_t *avail)` | Gets available number of frames. |
+| `audio_return_t audio_pcm_write(void *audio_handle, void *pcm_handle, const void *buffer, uint32_t frames)` | Writes frames to a PCM device. |
+| `audio_return_t audio_pcm_read(void *audio_handle, void *pcm_handle, void *buffer, uint32_t frames)` | Reads frames from a PCM device. |
+| `audio_return_t audio_pcm_get_fd(void *audio_handle, void *pcm_handle, int *fd)` | Gets poll descriptor for a PCM handle. |
+| `audio_return_t audio_pcm_recover(void *audio_handle, void *pcm_handle, int revents)` | Recovers the PCM state. |
+| `audio_return_t audio_pcm_get_params(void *audio_handle, void *pcm_handle, uint32_t direction, void **sample_spec, uint32_t *period_size, uint32_t *periods)` | Gets parameters of a PCM device. |
+| `audio_return_t audio_pcm_set_params(void *audio_handle, void *pcm_handle, uint32_t direction, void *sample_spec, uint32_t period_size, uint32_t periods)` | Sets hardware and software parameters of a PCM device. |
+
+### Configuration[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-15)]
+
+To support a variety of devices, PulseAudio and device configuration have to be modified by the vendor. The following table shows the PulseAudio configuration.
+
+| Configurations | Description |
+| ------------------------ | ---------------------------------------- |
+| `/etc/pulse/daemon.conf` | Configuration file for the PulseAudio daemon.In this file, the PulseAudio daemon properties such as priority, log-level, resampling method, and default sample rate can be modified.In Tizen, PulseAudio daemon must be running as only system mode not user mode. |
+| `/etc/pulse/client.conf` | Configuration file for the PulseAudio clients.Not much needed for modification in general use case. |
+| `/etc/pulse/system.pa` | PulseAudio Sound Server startup script.This startup script is used only if PulseAudio is started in system mode.Initial module loading is triggered by this file, so if there are some vendor specific modules to be loaded, they must be added here. |
+| `/etc/pulse/default.pa` | PulseAudio Sound Server Startup Script.This startup script is used only if PulseAudio is started per user.Currently Tizen does not support this mode. |
+
+- Stream/device configuration
+ - Stream map: Latency, volume and streams can be configured in this file.
+ - Device map: Device types and device files can be configured in this file.
+
+The following table shows examples of the the device configuration.
+
+| Configurations | Example |
+| ---------------------------- | ---------------------------------------- |
+| `/etc/pulse/stream-map.json` | `{ "latencies":[ { "type":"low", "fragsize-ms":25, "minreq-ms":-1, "tlength-ms":100, "prebuf-ms":0, "maxlength":-1, }, { "type":"high", "fragsize-ms":75, "minreq-ms":-1, "tlength-ms":400, "prebuf-ms":0, "maxlength":-1, }, ], "volumes":[ { "type":"media", "is-hal-volume":1, }, { "type":"system", "is-hal-volume":0, }, { "type":"notification", "is-hal-volume":0, }, { "type":"ringtone", "is-hal-volume":0, }, { "type":"call", "is-hal-volume":1, }, ], "streams":[ { "role":"media", "priority":3, "route-type":"auto", "volume-types":{"in":"none","out":"media"}, "avail-in-devices":["audio-jack","builtin-mic"], "avail-out-devices":["forwarding","audio-jack","bt","builtin-speaker"], "avail-frameworks":["player","wav-player","tone-player","audio-io","recorder"], }, { "role":"system", "priority":2, "route-type":"auto", "volume-types":{"in":"none","out":"system"}, "avail-in-devices":["none"], "avail-out-devices":["forwarding","audio-jack","bt","builtin-speaker"], "avail-frameworks":["player","wav-player","tone-player","audio-io"], }, { "role":"notification", "priority":4, "route-type":"auto-all", "volume-types":{"in":"none","out":"notification"}, "avail-in-devices":["none"], "avail-out-devices":["audio-jack","bt","builtin-speaker"], "avail-frameworks":["player","wav-player","tone-player","audio-io"], }, { "role":"ringtone-call", "priority":6, "route-type":"auto-all", "volume-types":{"in":"none","out":"ringtone"}, "avail-in-devices":["none"], "avail-out-devices":["audio-jack","bt","builtin-speaker"], "avail-frameworks":["player","wav-player","tone-player","audio-io"], }, { "role":"call-voice", "priority":6, "route-type":"manual", "volume-types":{"in":"none","out":"call"}, "avail-in-devices":["builtin-mic","audio-jack","bt"], "avail-out-devices":["builtin-receiver","builtin-speaker","audio-jack","bt"], "avail-frameworks":["sound-manager"], }, ]}` |
+| `/etc/pulse/device-map.json` | `{ "device-types":[ { "device-type":"builtin-speaker", "builtin":true, "direction":["out"], "avail-condition":["pulse"], "playback-devices":{"normal":"alsa:sprdphone,0", "call-voice":"alsa:VIRTUALAUDIOW,0"} }, { "device-type":"builtin-mic", "builtin":true, "direction":["in"], "avail-condition":["pulse"], "capture-devices":{"normal":"alsa:sprdphone,0"} }, { "device-type":"audio-jack", "builtin":false, "direction":["both","out"], "avail-condition":["pulse","dbus"], "playback-devices":{"normal":"alsa:sprdphone,0", "call-voice":"alsa:VIRTUALAUDIOW,0"}, "capture-devices":{"normal":"alsa:sprdphone,0"} }, { "device-type":"bt", "profile":"a2dp", "builtin":false, "direction":["out"], "avail-condition":["pulse"] }, { "device-type":"bt", "profile":"sco", "builtin":false, "direction":["both"], "avail-condition":["pulse","dbus"], "playback-devices":{"normal":"alsa:sprdphone,0", "call-voice":"alsa:VIRTUALAUDIOW,0"}, "capture-devices":{"normal":"alsa:sprdphone,0"} }, { "device-type":"usb-audio", "builtin":false, "direction":["both", "in", "out"], "avail-condition":["pulse"] } ], "device-files": { "playback-devices":[ { "device-string":"alsa:sprdphone,0", "role": { "normal":"rate=44100", } }, { "device-string":"alsa:VIRTUALAUDIOW,0", "role": { "call-voice":"rate=16000 channels=1 tsched=0 alternate_rate=16000", } } ], "capture-devices":[ { "device-string":"alsa:sprdphone,0", "role":{"normal":"rate=44100"} } ] }}` |
+
+### References[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-16)]
+
+- Driver configuration for Samsung chipset
+
+
+
+ The following list is an example of the kernel `.config` values to be set for audio in the Samsung chipset.
+
+```
+CONFIG_SOUND=y
+CONFIG_SND=y
+CONFIG_SND_TIMER=y
+CONFIG_SND_HWDEP=y
+CONFIG_SND_JACK=y
+CONFIG_SND_SOC = y
+CONFIG_SND_SOC_SAMSUNG = y
+CONFIG_SND_SAMSUNG_I2S = y
+CONFIG_SND_SOC_SLP_TRATS_MC1N2 = y
+CONFIG_SND_SOC_I2C_AND_SPI = y
+CONFIG_SND_SOC_MC1N2=y
+
+```
+
+- PulseAudio
+
+ Version: 5.0
+
+ Website: [http://www.freedesktop.org/wiki/Software/PulseAudio](http://www.freedesktop.org/wiki/Software/PulseAudio)
+
+
+- ALSA
+
+ Website: [http://www.alsa-project.org](http://www.alsa-project.org/)
+
+## Player[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-17)]
+
+The multimedia player framework controls the player plugins (demuxer, codecs, and renderer plugins) of the GStreamer to play media content. The kernel interfaces to control codecs can be different for different chipsets, so the corresponding codec plugins must be implemented specifically for each chipset.
+
+[](https://wiki.tizen.org/File:Player.png)
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-18)]
+
+[](https://wiki.tizen.org/File:Playerplugin.png)
+
+There is no specific OAL for the multimedia player framework. As part OAL interface, the player plugins consists of the `gst-omx` codec plugins and video/audio renderer plugins. For details of the `gst-omx` plugin details, see [Porting OAL Interface (Codecs)](https://wiki.tizen.org/Porting_Guide#Porting_OAL_Interface_9). For more information about Avsystem for audio, see [Audio](https://wiki.tizen.org/Porting_Guide/Multimedia#Audio)), and Wayland (UI-framework) for display, see [Video](https://wiki.tizen.org/Porting_Guide/Multimedia#Video).
+
+### Configuration[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-19)]
+
+- Configuration file
+ - The multimedia player framework uses the `mmfw_player.ini` configuration file to set various parameters for selecting different codecs and display plugins.
+ - The `mmfw_player.ini` configuration file is provided by the `mmfw-sysconf-xxx` package.
+ - In the final stage of development, the permission for this file needs to be changed to read-only.
+- Configuring the player
+ - File name: `mmfw_player.ini`
+ - 1 `player.ini` file is needed in each board (or model).
+ - Codec plugins for this board are located in the `/usr/lib/gstreamer-1.0` directory. Changing the codec plugin does not mean modifying this `.ini` file because the player supports the auto plugin feature.
+- As needed, the following setting values can be used:
+ - Exclude keyword element
+ - Audio filter
+
+### References[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-20)]
+
+- Display Driver Configuration for Samsung chipset
+
+
+The following list is an example of the kernel `.config` values to be set for display in the Samsung chipset.
+
+```
+CONFIG_DRM = y
+CONFIG_FB = y
+CONFIG_FB_S3C = y
+CONFIG_FB_S3C_LCD_INIT = y
+CONFIG_FIMD_EXT_SUPPORT = y
+CONFIG_FIMD_LITE_SUPPORT = y
+
+```
+
+- Kernel Node
+
+
+- Frame buffers: `/dev/fb(0-4)`
+- `gst-omx` version : 1.2.0[http://gstreamer.freedesktop.org/src/gst-omx/](http://gstreamer.freedesktop.org/src/gst-omx/)[http://www.freedesktop.org/wiki/GstOpenMAX](http://www.freedesktop.org/wiki/GstOpenMAX)
+- For all GStreamer documentation, see [http://gstreamer.freedesktop.org/documentation/](http://gstreamer.freedesktop.org/documentation/).
+- For developing GStreamer plugins, see [http://gstreamer.freedesktop.org/data/doc/gstreamer/head/pwg/html/index.html](http://gstreamer.freedesktop.org/data/doc/gstreamer/head/pwg/html/index.html).
+- For more information about OpenMAX IL components, see [http://www.khronos.org/openmax/il/](http://www.khronos.org/openmax/il/).
+
+## Codec[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-21)]
+
+The following figure illustrates the codecs and their relations. It shows 2 types of codec plugins, the Gstreamer and OpenMAX.
+
+[](https://wiki.tizen.org/File:Codec.png)
+
+- Gstreamer codec plugin
+ - The Gstreamer codec plugin can be linked and used easily to the Gstreamer pipeline, which is used in the multimedia framework.
+- OpenMAX codec plugin
+ - Some of the codec vendors provide OpenMAX IL components and not Gstreamer plugins. Tizen provides the `gst-omx` plugins to use the OpenMAX IL components. The Gstreamer pipeline used in the multimedia framework can control and transfer data to OpenMAX IL component using the `gst-omx` plugin.
+
+
+- Description of each codec component
+
+
+- Gstreamer codec plugin
+
+
+
+ - In addition, to link a Gstreamer pipeline, the capability of the codec plugin can be negotiated with the linked element in the pipeline.
+ - To get detailed information, such as the capability of an element, use the `#gst-inspect-1.0 (element name)` command.[](https://wiki.tizen.org/File:Gst-inspect.png)
+
+- OpenMAX component codec plugin
+
+
+
+ - To use the OpenMAX component in Gstreamer, the `gst-omx` (open source) package is provided. By using this package, Gstreamer can recognize and use an OpenMAX component as a Gstreamer element. `gst-omx` is a Gstreamer plugin that allows communication with OpenMAX IL components. The usage of the `gst-omx` plugin is the same as other Gstreamer plugins.
+ - For more detailed information about this plugin, see [http://www.freedesktop.org/wiki/GstOpenMAX](http://www.freedesktop.org/wiki/GstOpenMAX). For more information about OpenMAX IL, see [http://www.khronos.org/openmax/](http://www.khronos.org/openmax/).
+ - The `gst-omx` plugin refers to a `gstomx.conf` configuration file. This file is included in the `gst-omx` package, and installed to the `/etc/xdg/gst-omx.conf` directory in the target device.
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-22)]
+
+**OpenMAX component codec plugin**
+
+An industry standard that provides an abstraction layer for computer graphics, video, and sound routines. The interface abstracts the hardware and software architecture in the system. The OpenMAX IL API allows the user to load, control, connect, and unload the individual components. This flexible core architecture allows the Integration Layer to easily implement almost any media use case and mesh with existing graph-based media frameworks. The key focus of the OpenMAX IL API is portability of media components OpenMAX IL interfaces between media framework, such as GStreamer and a set of multimedia components (such as an audio or video codecs). `gst-omx` is a GStreamer plug-in package that allows communication with OpenMAX IL components. The `gst-omx` structuring is classified into different object classes based on the functionality. The following is the object structuring of a video decoder plugin in `gst-omx`.
+
+[](https://wiki.tizen.org/File:Gst-omx.png)
+
+The `GstVideoDecoder` base class is for video decoders provide encoded data to derived `GstOMXVideoDec` and each input frame is provided in turn to the subclass's `handle_frame` callback. The `GstVideoDecoder` base class and derived subclass cooperate in the following way:
+
+1. Configuration
+ - `GstVideoDecoder` calls the `start()` function when the decoder element is activated.
+ - `GstVideoDecoder` calls the `set_format()` function to inform the subclass of caps describing input video data
+2. Data processing
+ - Each input frame is provided in turn to the subclass's `handle_frames()` function.
+ - The subclass calls the `gst_video_decoder_finish_frame()` or `gst_video_decoder_drop_frame()` function.
+3. Shutdown phase
+ - The `GstVideoDecoer` class calls the `stop()` function.
+
+### Configuration[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-23)]
+
+**OpenMAX component codec plugin**
+
+The `gst-omx` plugin refers to a configuration file, such as `gstomx.conf`. This file is included in the `gst-omx` package, and installed in the `/etc/xdg/gstomx.conf` directory on the target device. The `gstomx.conf` file needs to change appropriately, according to vendors which provide OpenMAX component. The following figures lists the values of each item in the lists separated by commas. Each Gstreamer element is separated by a semicolon.
+
+[](https://wiki.tizen.org/File:Gst-openmax.conf.png)
+
+The following figure shows an example.
+
+[](https://wiki.tizen.org/File:Omx_mpeg4dec.png)
+
+Each value needs to be changed appropriately, according to vendors who provide the OpenMAX component. When you are finished with these settings, the result is a Gstreamer type codec plugin, and you can test the codec the same way.
+
+- Using the codec plugin in the player
+ - Because the player uses auto plugging, it does not need an additional setting.
+ - If the decoder plugin has an acceptable capability, this plugin can be linked with a player pipeline in order of rank.
+ - If the codec name is included in the excluded keyword in the `/usr/etc/mmfw_player.ini` file (`mmfw-sysconf` package), it is excluded in the player pipeline.
+- Using the codec plugin in the camcorder
+ - Because the camcorder clarified its audio, video, and image encoder in the `/usr/etc/mmfw_camcorder.ini` file (`mmfw-sysconf` package), you need to change this category value to set your own codec name.
+
+[](https://wiki.tizen.org/File:Videoencoder.png)
+
+### References[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Multimedia&action=edit§ion=T-24)]
+
+- `gst-omx` version: 1.2[http://gstreamer.freedesktop.org/src/gst-omx/](http://gstreamer.freedesktop.org/src/gst-omx/)[http://www.freedesktop.org/wiki/GstOpenMAX](http://www.freedesktop.org/wiki/GstOpenMAX)
+- For all GStreamer documentation, see [http://gstreamer.freedesktop.org/documentation/](http://gstreamer.freedesktop.org/documentation/).
+- For developing GStreamer plug-ins, see [http://gstreamer.freedesktop.org/data/doc/gstreamer/head/pwg/html/index.html](http://gstreamer.freedesktop.org/data/doc/gstreamer/head/pwg/html/index.html).
+- For more information about OpenMAX IL components, see [http://www.khronos.org/openmax/il/](http://www.khronos.org/openmax/il/).
+
+# Connectivity[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=11)]
+
+## Bluetooth[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-1)]
+
+Bluetooth is the short range communication used to communicate between 2 devices. In Tizen, open source Bluetooth components like BlueZ and ObexD are used. Bluez and Obexd run as the daemon and there is an interface library Bluetooth Framework, used for applications to access BlueZ or ObexD over the D-Bus interface.
+
+This section explains the Bluetooth architecture on the Tizen platform and how Tizen can be ported, along with the configuration parameters and its values.
+
+Bluetooth Low Energy function was implemented in BlueZ and `bluetooth-frwk`.
+
+The following figure explains the Bluetooth architecture on Tizen.
+
+[](https://wiki.tizen.org/File:Bluetooth.png)
+
+The Bluetooth framework provides dialogue for the user. It controls the BlueZ, ObexD, and PulseAudio daemons. Bluetooth provides a standard interface between the Bluetooth chip and AP, called the HCI (Host Controller Interface). HCI can be implemented on USB, UART, SDIO, but for the mobile environment, UART is used most. Depending on the chip vendor, HCI Interface Activation can be different. The vendor provides the HCI configuration and the initial scripts. For example, Broadcom and Spreadtrum provide firmware and a loading tool. Tizen supports Bluetooth version 4.2. The supported profiles are GATT, FTP, OPP, MAP, PBAP, A2DP, AVRCP, HSP/HFP, RFCOMM, HID, HDP, and PAN. Bluetooth framework Tizen Bluetooth is based on the open source BlueZ project. BlueZ provides the DBUS API and based on it, Tizen BT framework provides the C Language API. It is recommended to use the Tizen Bluetooth framework.
+
+The following components are necessary for Bluetooth:
+
+- Application
+ - The user dialogue that controls the BlueZ, ObexD, and PulseAudio daemons
+- ObexD
+ - The open source component
+ - Object exchange daemon
+ - Supports OPP, FTP, PBAP, SYNC, and MAP profile stack
+- BluetoothD
+ - BluetoothD is the open souce component, Bluez 5.37 is supported
+ - Bluetooth central daemon
+ - Supports GAP, SDP, A2DP, AVRCP, HFP, HSP, and GATT profile stack
+- Bluetooth Subsystem
+ - Provides the BT unix socket. Each protocol can be accessed by its socket.
+ - Supports the L2CAP, RFCOMM, SCO, and HCI protocols
+- Bluetooth Driver
+ - BT Chip Driver
+ - In case of UART, [Linux](https://wiki.tizen.org/Linux) kernel provides the interface.
+ - GPIO configuration, `rfkill` (Radio Frequency Management) and power management can be handled by both the vendor and the porting engineer.
+- BT Firmware Loading Module
+ - Depending on the environment, it loads the Bluetooth firmware to the Bluetooth chip.
+ - Tizen and the chipset vendor need to implement this together.
+ - Package: `bluetooth-tools`
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-2)]
+
+The following OAL scripts are run during the Bluetooth stack start and end sequences. These scripts invoke the Bluetooth chip specific (such as Broadcom and Spreadtrum) scripts, provided by the chipset vendor to perform chip specific configuration. These scripts are available in the `bluetooth-dev-tools.under` package. When this package is installed, it copies the scripts in the `/usr/etc/Bluetooth/` directory.
+
+- `bt-stack-up.sh`
+
+
+
+
+- `bt-stack-down.sh`
+
+
+
+
+- `bt-reset-env.sh`
+
+
+
+
+- Tizen BT Obex profiles
+
+In Tizen, for the `obex` based profiles, the open source ObexD is used.
+
+- BT Obex profiles server (`obexd`)
+
+
+
+
+- BT Obex profiles client (`obex-client`)
+
+
+
+### Configuration[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-3)]
+
+There are a few configuration changes that need to be made to enable the specific chipset and the scripts and other configuration information, such as UART speed and UART terminal (`tty`), to be opened specific to the chipset. These changes must be provided by the chipset vendors.
+
+- Configuration for the BCM4358 Bluetooth chipset by Broadcomm
+
+
+- `hciattach`
+
+
+
+
+- The Bluetooth UART used is `/dev/ttySAC3`
+- The Broadcom firmware used is `BCM4358A1_001.002.005.0032.0066.hcd`
+- The UART speed configuration is 3000000 for BCM4358A1
+- The `bcmtool` used is `bcmtool_4358a1`
+- The `.bd_addr` contains the unique Bluetooth address, which is generated during the first Bluetooth activation
+- Register the Bluetooth device:
+
+```
+bcmtool_4358a1 /dev/ttySAC0 –FILE=BCM4358A1_001.002.005.0032.0066.hcd –BAUD=3000000 –ADDR=/csa/bluetooth/.bd_addr –SETSCO=0,0,0,0,0,0,0,3,3,0 –LP
+```
+
+- Attach a serial device using UART HCI to the Bluetooth stack for a broadcom device:
+
+```
+hciattach /dev/ttySAC3 –S 3000000 bcm2035 3000000 flow
+```
+
+- Run the Bluetooth daemon version 5.37:
+
+```
+bluetoothd
+```
+
+- Bring the device up, set up the device name, and enable the SSP mode:
+
+```
+hciconfig hci0 up
+hciconfig hci0 name “Tizen-Mobile”
+hciconfig hci0 sspmode 1
+```
+
+- Switch on the Bluetooth radio:
+
+```
+rfkill unblock bluetooth
+```
+
+- Switch off the Bluetooth radio:
+
+```
+rfkill block bluetooth
+```
+
+- Configuration for the sc2331 Bluetooth chipset by Spreadtrum
+
+
+- `hciattach`
+
+
+
+
+- Registering the Bluetooth device:
+
+
+
+
+- Install the following files in the target's `/usr/lib/firmware` directory:
+
+```
+sc2331_fdl.bin
+sc2331_fw.bin
+scx35_pikeavivaltove_3M_MARLIN_connectivity_calibration.ini
+scx35_pikeavivaltove_3M_MARLIN_connectivity_configure.ini
+```
+
+- The Bluetooth UART used is `/dev/ttyS0`.
+- The UART speed configuration is 3000000 for sc2331.
+- Attach a serial device using UART HCI to the Bluetooth stack:
+
+```
+hciattach -s 3000000 /dev/ttyS0 sprd 3000000 flow
+```
+
+- Run the bluetooth daemon version 5.37:
+
+```
+bluetoothd
+```
+
+- Bring the device up, set up the device name, and enable the SSP mode:
+
+```
+hciconfig hci0 up
+hciconfig hci0 name “Tizen-Mobile”
+hciconfig hci0 sspmode 1
+
+```
+
+### References[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-4)]
+
+Open source component version: BlueZ 5.37
+
+For more information, see [http://www.bluez.org/](http://www.bluez.org/).
+
+- Reference kernel configuration for Bluetooth
+
+The following kernel `.config` are enabled for Broadcom Bluetooth support:
+
+```
+CONFIG_BT=y
+CONFIG_BT_L2CAP=y
+CONFIG_BT_RFCOMM=y
+CONFIG_BT_RFCOMM_TTY=y
+CONFIG_BT_BNEP=y
+CONFIG_BT_HIDP=y
+CONFIG_BT_HCIUART=y
+CONFIG_BT_HCIUART_H4=y
+CONFIG_BCM4330=y
+CONFIG_RFKILL=y
+CONFIG_RFKILL_INPUT=y
+CONFIG_RXTRA_FIRMWARE_BCM4330=”BCM4330.hcd”
+```
+
+The following kernel `.config` are enabled for Bluetooth AVRCP support:
+
+```
+CONFIG_INPUT_MISC=y
+CONFIG_INPUT_UINPUT=y
+
+```
+
+The following kernel `.config` are enabled for Bluetooth HID support:
+
+```
+CONFIG_INPUT_GP2A=y
+CONFIG_INPUT_KR3DH=y
+```
+
+The following kernel `.config` are enabled for Bluetooth Audio (SCO-over-PCM) support:
+
+```
+CONFIG_BT_SCO=y
+CONFIG_INPUT_GP2A=y
+CONFIG_INPUT_KR3DH=y
+```
+
+The following kernel `.config` are enabled for Bluetooth Audio (SCO-over-PCM) support:
+
+```
+CONFIG_BT_SCO=y
+```
+
+## WLAN[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-5)]
+
+This section provides a step-by-step explanation of what's involved in adding a new Wi-Fi driver and making Wi-Fi work. [](https://wiki.tizen.org/File:Wlan.png)
+
+Feature Overview:
+
+- WLAN (802.11 b/g/n)
+- WPS PBC
+- EAP (PEAP, TTLS)
+
+Tizen uses `wpa_supplicant` as the platform interface to the Wi-Fi device. Your Wi-Fi driver must be compatible with the standard `wpa_supplicant`.
+
+The Tizen WLAN architecture is centered on the Linux wireless (IEEE-802.11) subsystem. The Linux wireless SW stack defines the WLAN hardware adaptation software interfaces that need to be used in Tizen. In practice, the required interfaces are defined by cfg80211 for FullMAC WLAN devices and by mac80211 for SoftMAC WLAN devices. In addition, a Linux network interface needs to be supported towards the Linux TCP/IP stack.
+
+The Connection Manager (ConnMan) is a daemon for managing internet connections within embedded devices running the Linux operating system.
+
+The `wpa_supplicant` is a WPA Supplicant with support for WPA and WPA2 (IEEE 802.11i / RSN). Supplicant is the IEEE 802.1X/WPA component that is used in the client stations. It implements key negotiation with a WPA Authenticator and it controls the roaming and IEEE 802.11 authentication/association of the WLAN driver.
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-6)]
+
+The WLAN driver plugin is specific to a Wi-Fi chipset. This includes firmware and tools specific to Wi-Fi chipsets. Wi-Fi chipset firmware and tools files must be copied to the WLAN driver plugin directory, built, and installed before testing the Wi-Fi functionality. Because of Tizen platform requirement, the Wi-Fi driver must create the `/opt/etc/.mac.info` file, which has the MAC address of device.
+
+The WLAN driver plugin contains the `wlan.sh` file (located in `/usr/bin/wlan.sh`), which is used to load or unload the Wi-Fi driver firmware.
+
+When the `wifi_activate()` function is called, the load driver request is sent to the NET-CONFIG daemon. The NET-CONFIG daemon loads the Wi-Fi driver using the `wlan.sh` script file. Similarly, the `wifi_deactivate()` function requests unloading of the Wi-Fi driver. In case of Wi-Fi Direct, the `wifi_direct_activate()` and `wifi_direct_deactivate()` functions make the Wi-Fi Direct manager load or unload the Wi-Fi driver using the `wlan.sh` script.
+
+Using the `/usr/bin/wlan.sh` script:
+
+- `wlan.sh start`: Power up the Wi-Fi driver in station mode by loading the driver and running the firmware file.
+- `wlan.sh p2p`: Power up the Wi-Fi driver in Wi-Fi Direct mode by loading the driver and running the firmware file.
+- `wlan.sh softap`: Power up the Wi-Fi driver in Soft AP mode by loading the driver and running the firmware file.
+- `wlan.sh stop`: Power down the Wi-Fi driver.
+
+All other Wi-Fi related functionality is handled by the ConnMan daemon
+
+### References[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-7)]
+
+- Connection Manager (ConnMan) project website: [https://01.org/connman](https://01.org/connman)
+- Linux wireless (IEEE-802.11) subsystem: [http://linuxwireless.org/](http://linuxwireless.org/)
+- Information on Linux WPA/WPA2/IEEE 802.1X Supplicant: [http://hostap.epitest.fi/wpa_supplicant/](http://hostap.epitest.fi/wpa_supplicant/)
+- Latest ConnMan release: [http://git.kernel.org/?p=network/connman/connman.git;a=summary](http://git.kernel.org/?p=network/connman/connman.git;a=summary)
+- WLAN driver plugin git path: `/adaptation/devices/wlandrv-plugin-tizen-bcm43xx`
+
+
+- Reference kernel configurations
+
+
+- These options need to be enabled if the driver supports the cfg802.11 configuration API, instead of the wireless extension API. For more information, see [http://linuxwireless.org](http://linuxwireless.org/).
+
+```
+CONFIG_CFG80211
+CONFIG_LIB80211
+CONFIG_MAC80211 (Enable this flag, if the driver supports the softMAC feature)
+
+```
+
+- The following configuration options must be enabled in the kernel if the driver supports wireless extension APIs.
+
+```
+CONFIG_WIRELESS_EXT=y
+CONFIG_WEXT_CORE=y
+CONFIG_WEXT_PROC=y
+CONFIG_WEXT_PRIV=y
+CONFIG_WEXT_SPY=y
+CONFIG_WIRELESS_EXT_SYSFS=y
+```
+
+## NFC[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-8)]
+
+The NFC application enables the user to read and/or import the content written on an NFC tag, edit the content written on an NFC tag, write and save data in an NFC tag, and load and save the NFC data from or in a file.
+
+[](https://wiki.tizen.org/File:Nfc.png)
+
+The NFC client acts as an interface between the NFC app and the NFC manager, while writing or editing tag information in any physical tag. The NFC manager is the main interface, which actually deals with NFC physical tags, creates a connection with tags, and detects it. It is a daemon process to control the NFC chipset (such as NXP pn544). It provides the read and write service and basic P2P communication service, as well as the basic API for the client application. The NFC stack contains the required plugin, based on the NFC chipset. Currently, the `nfc-plugin-nxp` is used for the NXP chipset. The NFC plugin acts as an interface between the NFC chipset with the NFC framework (`nfc-manager`). It must be implemented according to the interface provided by the `nfc-manager`.
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-9)]
+
+The NFC plugin is implemented as a shared library and it interfaces the Tizen `nfc-manager` and the vendor NFC chip. The NFC manager loads the `libnfc-plugin.so` library at runtime from the `/usr/lib/libnfc-plugin.so` directory. Any vendor-specific plugin is installed within the same path. The plugin must be written with predefined OAL API interfaces.
+
+During initialization, the `nfc-manager` loads the `nfc-plugin.so` library, searches for the `onload()` function, and calls the function with an interface structure instance as an argument for mapping of all the OAL interfaces. These OAL/OEM interfaces are implemented according to the underlying NFC chipset. Once the mapping is done, the NFC manager interact with `nfc-plugin`, which implements the vendor specific OAL interfaces.
+
+The following example shows the `onload()` function for reference:
+
+```
+Bool
+onload(net_nfc_oem_interface_s *oem_interfaces)
+{
+ oem_interfaces->init = xxx; /* xxx refers to plugin APIs */
+ oem_interfaces->deinit = xxx;
+ oem_interfaces->register_listener = xxx;
+ oem_interfaces->unregister_listener = xxx;
+ oem_interfaces->check_firmware_version = xxx;
+
+ return true;
+}
+
+```
+
+The NFC OAL interfaces are defined in the following structure. Use the `net_nfc_oem_controller.h` header file.
+
+```
+typedef struct _net_nfc_oem_interface_s
+{
+ net_nfc_oem_controller_init init;
+ net_nfc_oem_controller_deinit deinit;
+ net_nfc_oem_controller_register_listener register_listener;
+ net_nfc_oem_controller_unregister_listener unregister_listener;
+ net_nfc_oem_controller_check_firmware_version check_firmware_version;
+ net_nfc_oem_controller_update_firmware update_firmeware;
+ net_nfc_oem_controller_get_stack_information get_stack_information;
+ net_nfc_oem_controller_configure_discovery configure_discovery;
+ net_nfc_oem_controller_get_secure_element_list get_secure_element_list;
+ net_nfc_oem_controller_set_secure_element_mode set_secure_element_mode;
+ net_nfc_oem_controller_connect connect;
+ net_nfc_oem_controller_connect disconnect;
+ net_nfc_oem_controller_check_ndef check_ndef;
+ net_nfc_oem_controller_check_target_presence check_presence;
+ net_nfc_oem_controller_read_ndef read_ndef;
+ net_nfc_oem_controller_write_ndef write_ndef;
+ net_nfc_oem_controller_make_read_only_ndef make_read_only_ndef;
+ net_nfc_oem_controller_transceive transceive;
+ net_nfc_oem_controller_format_ndef format_ndef;
+ net_nfc_oem_controller_exception_handler exception_handler;
+ net_nfc_oem_controller_is_ready is_ready;
+ net_nfc_oem_controller_llcp_config config_llcp;
+ net_nfc_oem_controller_llcp_check_llcp check_llcp_status;
+ net_nfc_oem_controller_llcp_activate_llcp activate_llcp;
+ net_nfc_oem_controller_llcp_create_socket create_llcp_socket;
+ net_nfc_oem_controller_llcp_bind bind_llcp_socket;
+ net_nfc_oem_controller_llcp_listen listen_llcp_socket;
+ net_nfc_oem_controller_llcp_accept accept_llcp_socket;
+ net_nfc_oem_controller_llcp_connect_by_url connect_llcp_by_url;
+ net_nfc_oem_controller_llcp_connect connect_llcp;
+ net_nfc_oem_controller_llcp_disconnect disconnect_llcp;
+ net_nfc_oem_controller_llcp_socket_close close_llcp_socket;
+ net_nfc_oem_controller_llcp_recv recv_llcp;
+ net_nfc_oem_controller_llcp_send send_llcp;
+ net_nfc_oem_controller_llcp_recv_from recv_from_llcp;
+ net_nfc_oem_controller_llcp_send_to send_to_llcp;
+ net_nfc_oem_controller_llcp_reject reject_llcp;
+ net_nfc_oem_controller_llcp_get_remote_config get_remote_config;
+ net_nfc_oem_controller_llcp_get_remote_socket_info get_remote_socket_info;
+ net_nfc_oem_controller_sim_test sim_test;
+ net_nfc_oem_controller_test_mode_on test_mode_on;
+ net_nfc_oem_controller_test_mode_off test_mode_off;
+net_nfc_oem_controller_support_nfc support_nfc;
+} net_nfc_oem_interface_s;
+
+```
+
+The `nfc_oem_interface_s` is exported in the `nfc-plugin`. Using this interface structure, the `nfc-manager` communicates with the OAL interfaces at runtime. The NFC plugin loads when the `nfc-manager` is started and the plugin `init()` function is called to initialize the NFC chip.
+
+```
+int (*init) (net_nfc_oem_controller_init*);
+```
+
+The `deinit()` function the `nfc-manager` issues to deinitialize the NFC chip:
+
+```
+int (*deinit) (net_nfc_oem_controller_deinit *);
+```
+
+- Sending the notification to the upper layer (NFC Service)
+
+Refer to the `phdal4nfc_message_glib.c` file. The `g_idle_add_full` is used for handling the message in the NFC Service. You can use the callback client asynchronously in the client context. Post a message in queue, and the message is processed by a client thread.
+
+- Reference implementation of the NFC plugin
+
+Sample code snippets cannot be reproduced. Code is proriatory. For reference, see the `nfc-plugin-emul` and `nfc-plugin-nxp` files.
+
+### Configuration[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-10)]
+
+The `nfc-plugin` package must be saved to the `/usr/lib/libnfc-plugin.so` directory when installed. When the `nfc-manager` starts, it looks for the plugin library and loads it dynamically from this path.
+
+### References[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-11)]
+
+Enable the following configuration options in the kernel `.config`.
+
+```
+Using Pn544: CONFIG_PN544_NFC
+Using Pn65n: CONFIG_PN65N_NFC
+
+```
+
+API references available are under the [Tizen_3.0_Porting_Guide#Appendix_2](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Appendix_2).
+
+For more information, see [http://nfc-forum.org/](http://nfc-forum.org/).
+
+## MTP[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-12)]
+
+- MTP exchanges can only occur between 2 products at a time, and in each communication, 1 product acts as the initiator and the other as the responder.
+- The initiator is the product that initiates actions with the responder by sending operations to the responder.
+
+[](https://wiki.tizen.org/File:Mtp-initiator.png)
+
+- The responder can not initiate any actions, and can only send responses to operations sent by the initiator or send events.
+
+[](https://wiki.tizen.org/File:Mtp-responder.png)
+
+- In the Tizen system, the USB host is the initiator, and the USB device is the responder.
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-13)]
+
+- Tizen MTP initiator and responder do not have an OAL Interface.
+- There are extension possibilities of the MTP Transport layer.
+
+### Configuration[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-14)]
+
+- MTP Initiator
+
+
+- The MTP Initiator consist of 3 packages.
+
+```
+mtp-initiator daemon
+mtp-initiator api
+libmtp opensource
+```
+
+- The MTP initiator does not operate independently. It requires the help of another module, such as USB.
+- When the USB device is connected to the host, the module must run the MTP initiator daemon.
+
+
+- MTP Responder
+
+
+- The MTP responder consist of 1 package.
+
+```
+mtp-responder daemon
+```
+
+- The MTP responder does not operate independently. It requires the help of another module, such as USB.
+- When the USB device is connected to the host, the module must run the MTP responder daemon.
+
+### References[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Connectivity&action=edit§ion=T-15)]
+
+- Media Transfer Protocol v.1.1 Spec: [http://www.usb.org/developers/docs/devclass_docs/](http://www.usb.org/developers/docs/devclass_docs/)
+
+# Location[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=12)]
+
+## Location Framework[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Location&action=edit§ion=T-1)]
+
+Location provides location based services (LBS) including the position information, satellite information and GPS status.
+
+[](https://wiki.tizen.org/File:Location.png)
+
+You can use the following location features´:
+
+- GPS (Global positioning system)
+- Getting the current position, last known position, accuracy, distance and velocity
+- Getting the satellite information of GPS and GLONASS
+- Notifying a user when they enter or exit a predefined set of boundaries, known as geofence, like school attendance zones or neighborhood boundaries
+
+
+- Location framework
+
+
+- location-manager
+
+
+
+
+- Location Library
+ - Contains the location providers that can be used by the location-manager to get the services.
+ - GPS
+ - GPS provides position information, velocity and satellite information. It is used to get the current position of a device.
+- dbus
+ - This is the IPC used to communicate between location module and the Location daemon.
+- lbs-server
+ - lbs-server provides position, velocity, NMEA, and satellite information by communicating with a GPS chip.
+ - lbs-server has the following functionalities:
+ - Initializes and deinitializes the GPS, opens and closes GPS applications.
+ - Provides the position result for location library.
+ - Location session management-determination for session termination based on session status.
+ - Serial interface with the GPS receiver
+ - Enables the GPS chipset to support standalone GPS positioning methods.
+ - Supports the standalone operation mode.
+
+
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Location&action=edit§ion=T-2)]
+
+The GPS plugin is implemented based on the Tizen `lbs-server` for vendor specific GPS devices.
+
+The GPS plugin is implemented as a shared library and the `lbs-server` loads a specific GPS plugin at runtime. A GPS plugin must be written with predefined interfaces.
+
+The `lbs-server-plugin-dev` source package is installed on OBS by adding the following command in the package spec file.
+
+```
+BuildRequires: pkgconfig(lbs-server-plugin)
+
+```
+
+The `lbs-server-plugin-dev` package source files can be found in the following directories:
+
+```
+/usr/include/lbs-server-plugin/*.h
+/usr/lib/pkgconfig/lbs-server-plugin.pc
+
+```
+
+The `gps_plugin_intf.h` header file includes the API interfaces for the communication between the `lbs-server` and its GPS plugin.
+
+```
+typedef struct {
+ /* Initialize the plugin module and register callback function for event delivery */
+ int (*init) (gps_event_cb gps_event_cb, void *user_data);
+ /* Deinitialize the plugin module */
+ int (*deinit) (gps_failure_reason_t *reason_code);
+ /* Request specific action to plugin module */
+ int (*request) (gps_action_t gps_action, void *gps_action_data, gps_failure_reason_t *reason_code);
+} gps_plugin_interface;
+
+```
+
+```
+const gps_plugin_interface *get_gps_plugin_interface();
+
+```
+
+The `get_gps_plugin_interface()` function must be exported in the GPS plugin. It gives the `gps_plugin_interface` structure to the `lbs-server`, and the `lbs-server` communicates by these interfaces. When the `lbs-server` is started, the GPS plugin is loaded and the `init()` function is called. At this moment, a GPS device must be initialized.
+
+```
+int (*init) (gps_event_cb gps_event_cb, void *user_data);
+
+```
+
+When `init()` function is called, the `gps_event_cb` is set. GPS events and data from a GPS device is delivered by the `gps_event_cb` registered call back function.
+
+```
+typedef int (*gps_event_cb) (gps_event_info_t *gps_event_info, void *user_data);
+
+```
+
+The following example describes the GPS events.
+
+```
+typedef enum {
+ GPS_EVENT_START_SESSION = 0x0000, /* The session is started */
+ GPS_EVENT_STOP_SESSION, /* The session is stopped */
+ GPS_EVENT_CHANGE_INTERVAL, /* Change updating interval */
+ GPS_EVENT_REPORT_POSITION = 0x0100, /* Bring up GPS position data */
+ GPS_EVENT_REPORT_SATELLITE, /* Bring up GPS SV data */
+ GPS_EVENT_REPORT_NMEA, /* Bring up GPS NMEA data */
+ GPS_EVENT_SET_OPTION = 0x0200, /* The option is set */
+ GPS_EVENT_GET_REF_LOCATION = 0x0300, /* Get the reference location for AGPS */
+ GPS_EVENT_GET_IMSI, /* Get IMSI for identification */
+ GPS_EVENT_OPEN_DATA_CONNECTION = 0x0400, /* Request opening data network connection */
+ GPS_EVENT_CLOSE_DATA_CONNECTION, /* Request closing data network connection */
+ GPS_EVENT_DNS_LOOKUP_IND, /* Request resolving host name */
+ GPS_EVENT_AGPS_VERIFICATION_INDI, /* Verification indicator for AGPS is required */
+ GPS_EVENT_FACTORY_TEST = 0x0500,/* Factory test is done */
+ GPS_EVENT_ERR_CAUSE = 0xFFFF /* Some error is occurred */
+} gps_event_id_t;
+
+```
+
+The GPS events contains specific GPS event data which is part of `gps_event_data_t` is delivered, see the `gps_plugin_intf.h`. When the `lbs-server` want to make a request to GPS device, the `request()` function is called.
+
+```
+int (*request) (gps_action_t gps_action, void *gps_action_data, gps_failure_reason_t *reason_code);
+
+```
+
+Each request is classified by `gps_action_t`.
+
+```
+typedef enum {
+ GPS_ACTION_SEND_PARAMS = 0x00,
+ GPS_ACTION_START_SESSION,
+ GPS_ACTION_STOP_SESSION,
+ GPS_ACTION_CHANGE_INTERVAL,
+ GPS_INDI_SUPL_VERIFICATION,
+ GPS_INDI_SUPL_DNSQUERY,
+ GPS_ACTION_START_FACTTEST,
+ GPS_ACTION_STOP_FACTTEST,
+ GPS_ACTION_REQUEST_SUPL_NI,
+ GPS_ACTION_DELETE_GPS_DATA,
+} gps_action_t;
+
+```
+
+With the standalone GPS (unassisted GPS), the `GPS_ACTION_START_SESSION` and `GPS_ACTION_STOP_SESSION` are mandatory actions. If the `GPS_ACTION_START_SESSION` is delivered, the GPS plugin starts the acquisition of satellites and reports the `GPS_EVENT_START_SESSION` event to the `lbs-server` by the `gps_event_cb` callback function. Once the acquisition is completed and position is fixed, its position should be delivered by the `gps_event_cb` with the `GPS_EVENT_REPORT_POSITION` event ID and the position data.
+
+To shut down the `lbs-server`, deinitialize the GPS device with the `deinit()` function.
+
+```
+int (*deinit) (gps_failure_reason_t *reason_code);
+
+```
+
+- Addign a new GPS plugin
+
+
+
+```
+#define PLATFORM_PATH "/sys/devices/platform"
+#define PLUGIN_PATH PLATFORM_PATH"/xxxxx_gps"
+
+```
+
+The `check_plugin_module(char* module_name)` function checks the access to available plugin in the `/sys/devices/platform` directory and the `load_plugin_module` loads the plugin during the boot up time.
+
+## Geofence[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Location&action=edit§ion=T-3)]
+
+The Geofence Manager API provides service related to geofence. A geofence is a virtual perimeter for a real-world geographic area.
+
+[](https://wiki.tizen.org/File:Geofence.png)
+
+You can to set a geofence with geopoint, Wi-Fi MAC address, and Bluetooth address. Notifications on events, such as changes in the service status are provided.
+
+There are 2 kinds of places and fences:
+
+- Public places and fences that are created by the MyPlace application can be used by all applications.
+- Private places and fences that are created by a specified application can only be used by the same application.
+
+Notifications can be received about the following events:
+
+- Zone in when a device enters a specific area
+- Zone out when a device exits a specific area
+- Results and errors for each event requested by the geofence module
+
+## Map Service[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Location&action=edit§ion=T-4)]
+
+The Location Maps API (Maps API) allows you to create map-aware applications.
+
+[](https://wiki.tizen.org/File:Mapservice.png)
+
+The Maps API has the following features:
+
+- Geocoder (geocoding and reverse geocoding)
+- Places (search places)
+- Routes (search directions)
+- Map Widget (rendering map images)
+
+The Maps API allows you to choose a map service provider to be included in the plugins.
+
+### Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Location&action=edit§ion=T-5)]
+
+The Maps plugin is implemented as a shared library and the Maps framework loads a specific Maps plugin at runtime. A Maps plugin must be written with predefined interfaces. The `capi-maps-service-plugin-devel` source package is installed on OBS by adding the following command in the package specification file:
+
+```
+BuildRequires: pkgconfig(capi-maps-service-plugin-devel)
+
+```
+
+The `capi-maps-service-plugin-devel` package source files can be found in the following directories:
+
+```
+/usr/include/maps/maps_plugin*.h
+/usr/include/maps/maps_*_plugin.h
+/usr/include/maps/maps_extra_types.h
+
+```
+
+The `module.h` header file includes the API interfaces for the communication between the Maps and its plugin.
+
+```
+typedef struct _interface_s {
+ /* Plugin dedicated functions */
+ maps_plugin_init_f maps_plugin_init;
+ maps_plugin_shutdown_f maps_plugin_shutdown;
+ maps_plugin_get_info_f maps_plugin_get_info;
+ maps_plugin_init_module_f maps_plugin_init_module;
+
+ /* Maps Provider access key, preference, and capabilities */
+ maps_plugin_set_provider_key_f maps_plugin_set_provider_key;
+ maps_plugin_get_provider_key_f maps_plugin_get_provider_key;
+ maps_plugin_set_preference_f maps_plugin_set_preference;
+ maps_plugin_get_preference_f maps_plugin_get_preference;
+ maps_plugin_is_service_supported_f maps_plugin_is_service_supported;
+ maps_plugin_is_data_supported_f maps_plugin_is_data_supported;
+
+ /* Geocode */
+ maps_plugin_geocode_f maps_plugin_geocode;
+ maps_plugin_geocode_inside_area_f maps_plugin_geocode_inside_area;
+ maps_plugin_geocode_by_structured_address_f maps_plugin_geocode_by_structured_address;
+ maps_plugin_reverse_geocode_f maps_plugin_reverse_geocode;
+ maps_plugin_multi_reverse_geocode_f maps_plugin_multi_reverse_geocode;
+
+ /* Place */
+ maps_plugin_search_place_f maps_plugin_search_place;
+ maps_plugin_search_place_by_area_f maps_plugin_search_place_by_area;
+ maps_plugin_search_place_by_address_f maps_plugin_search_place_by_address;
+ maps_plugin_search_place_list_f maps_plugin_search_place_list;
+ maps_plugin_get_place_details_f maps_plugin_get_place_details;
+
+ /* Route */
+ maps_plugin_search_route_f maps_plugin_search_route;
+ maps_plugin_search_route_waypoints_f maps_plugin_search_route_waypoints;
+
+ /* Cancel request */
+ maps_plugin_cancel_request_f maps_plugin_cancel_request;
+
+ /* Mapping */
+ maps_plugin_create_map_view_f maps_plugin_create_map_view;
+ maps_plugin_destroy_map_view_f maps_plugin_destroy_map_view;
+ maps_plugin_render_map_f maps_plugin_render_map;
+ maps_plugin_move_center_f maps_plugin_move_center;
+ maps_plugin_set_scalebar_f maps_plugin_set_scalebar;
+ maps_plugin_get_scalebar_f maps_plugin_get_scalebar;
+ maps_plugin_on_object_f maps_plugin_on_object;
+ maps_plugin_screen_to_geography_f maps_plugin_screen_to_geography;
+ maps_plugin_geography_to_screen_f maps_plugin_geography_to_screen;
+ maps_plugin_get_min_zoom_level_f maps_plugin_get_min_zoom_level;
+ maps_plugin_get_max_zoom_level_f maps_plugin_get_max_zoom_level;
+ maps_plugin_get_center_f maps_plugin_get_center;
+ maps_plugin_capture_snapshot_f maps_plugin_capture_snapshot;
+} interface_s;
+
+```
+
+These functions must be implemented and exported in the Maps plugin. To create a Maps handle classified by provider name string, the `maps_plugin_get_info()` function must provide the name. The name is recommended to be capitalized.
+
+The Maps plugins are located in the `/usr/lib/maps/plugins` directory.
+
+#### HERE Maps plugin[[edit](https://wiki.tizen.org/index.php?title=3.0_Porting_Guide/Location&action=edit§ion=T-6)]
+
+For now, the HERE Maps plugin is embedded on the platform basically, and the provider name is 'HERE'. To use this plugin, you must get the credential keys in the HERE developers site, "[https://developer.here.com](https://developer.here.com/)". You may need to pay a fee according to the threshold.
+
+For user consent demanded by HERE, the user consent application included in the HERE Maps plugin is launched at first time of use if not agreed before.
+
+# Telephony[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=13)]
+
+This document covers detailed Telephony architecture including the various components of Telephony and workflow through Telephony framework. The document also provides porting guidelines for vendors to ease the OAL interface development for their hardware.
+
+- Tizen Telephony features
+
+
+- Telecommunication functionalities, such as call, SS, SMS, SIM, network, and packet service
+- Plug-in Architecture
+
+
+- Definitions
+
+
+- Core object
+ - Bundle of functions and supportive database information designated to specific module, such as call, SS, SIM, network, which processes requests, responses, and notifications.
+ - Core objects form the executable component of a Telephony module (call, SS, SIM, network)
+- HAL
+ - HAL, Hardware Abstraction Layer, abstracts the actual hardware used and ensures that similar functionality is provided by various hardware (modems) of the same modem vendor.
+ - All hardware specific changes are controlled and processed by HALs.
+ - The modem driver can be required depending on the modem chipset.
+- Hooks
+ - Hooks provide a mechanism to tap requests, responses, and notifications of other Telephony modules.
+ - Hooking is a transparent mechanism and does not affect the normal processing of requests, responses, and notifications.
+
+## Tizen Telephony Architecture[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=14)]
+
+Tizen Telephony supports the plugin architecture, which provides flexibility to include various types of predefined plugins into the system with little change.
+
+[](https://wiki.tizen.org/File:Telephony-arch.png)
+
+The 3 major components of Tizen Telephony are the libraries, plugins, and server.
+
+## Telephony Libraries[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=15)]
+
+- Telephony API (TAPI) library
+
+The TAPI library (or simply TAPI) is a standardized interface provided to applications to interact with Tizen Telephony. It is provided as a `libtapi` package. The TAPI executes in the application’s context, and it provides sync and async APIs. The following figure shows the `libtapi` internal composition.
+
+[](https://wiki.tizen.org/File:Libtapi.PNG)
+
+Applications can interface to Telephony features, such as call, SMS, and network, through the respective module APIs exposed in the `libtapi` library. Telephony also provides an additional library, `capi-telephony` for third party applications.
+
+- Core Telephony library
+
+The Core Telephony library (or `libtcore`) provides an API framework for Tizen Telephony to inter-work. It is provided as `libtcore` package. The following figure shows the internal composition overview of the `libtcore`.
+
+[](https://wiki.tizen.org/File:Telephony03.png)
+
+With `libtcore`, you can:
+
+- Create, destroy, and maintain various server components, such as server, communicator, HAL, plugin, and core object.
+- Maintain storage, queue mechanism, and general utilities.
+- Support CMUX (creation/destruction/processing).
+- Parse AT.
+
+## Telephony Plugins[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=16)]
+
+There are 4 kinds of plugins:
+
+- Communicator plugins
+ - Interfaces TAPI and Telephony Server.
+ - For example, DBUS communicator (`DBUS_TAPI`) is provided by default.
+
+
+
+
+- Modem plugins
+ - Core functional units providing the Telephony functionality.
+ - Maintain and manage the Telephony states.
+ - Maintain and manage the databases related to Telephony.
+
+
+
+
+- Modem interface plugins
+ - Interfaces the telephony server to the communication processor.
+ - Hardware specific plugins which define hardware capabilities and usage
+ - Modem interface plugin is also called HAL.
+
+
+
+
+- Free Style plugins
+ - Provide completely independent functionality irrespective of hardware (communication processor).
+ - For example plugins, such as packetservice, storage, and indicator.
+
+
+
+The following figure provides an overview of all the Telephony plugins together.
+
+[](https://wiki.tizen.org/File:Telephony08.png)
+
+## Telephony Server[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=17)]
+
+Tizen Telephony runs as a Telephony server daemon called `telephony-daemon`.
+
+The Telephony server executes as a `g-main` loop from the `glib` library.
+
+[](https://wiki.tizen.org/File:Telephony09.png)
+
+## Porting OAL Interface[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=18)]
+
+OEM vendors can port available plugins within Telephony as needed. It is not mandatory that all the plugins to be ported to support a specific hardware.
+
+This section provides guidance to OEM vendors to develop various Telephony plugins.
+
+### Plugin Descriptors[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=19)]
+
+Any telephony plugin is required to provide a descriptor structure described in the following example.
+
+| Structure | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `struct tcore_plugin_define_desc { gchar *name; enum tcore_plugin_priority priority; int version; gboolean(*load)(); gboolean(*init)(TcorePlugin *); void (*unload)(TcorePlugin *);};` | Structure referred by Telephony server to load, initialize, and unload the plugin.This structure defines:Name of the pluginInitializing priority of the pluginPlugin versionPlugin 'load' function referencePlugin 'init' function referencePlugin 'unload' function reference |
+
+The descriptor structure of each plugin must be named as `plugin_define_desc`. The server obtains the address of this symbol in order to provide control to the plugin to execute its defined functionality.
+
+The order of initialization among various Telephony plugins is defined based on the plugin’s priority.
+
+OEMs need to specifically implement the modem and modem interface plugins to support their hardware.
+
+### Call Service Operations[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=20)]
+
+The implementation of the functions described in the following example is required to provide call services.
+
+| Structure | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `struct tcore_call_operations { TReturn (*dial)(CoreObject *o, UserRequest *ur); TReturn (*answer)(CoreObject *o, UserRequest *ur); TReturn (*end)(CoreObject *o, UserRequest *ur); TReturn (*hold)(CoreObject *o, UserRequest *ur); TReturn (*active)(CoreObject *o, UserRequest *ur); TReturn (*swap)(CoreObject *o, UserRequest *ur); TReturn (*join)(CoreObject *o, UserRequest *ur); TReturn (*split)(CoreObject *o, UserRequest *ur);};` | The structure referred by the Telephony server to provide call services.This structure defines:Call 'dial' function referenceCall 'answer' function referenceCall 'end' function referenceCall 'hold' function referenceCall 'active' function referenceCall 'swap' function referenceCall 'join' function referenceCall 'split' function reference |
+
+### SMS Service Operations[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=21)]
+
+The implementation of the functions described in the following example is required to provide SMS services.
+
+| Structure | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `struct tcore_sms_operations { TReturn (*send_umts_msg)(CoreObject *o, UserRequest *ur); TReturn (*send_cdma_msg)(CoreObject *o, UserRequest *ur); TReturn (*read_msg)(CoreObject *o, UserRequest *ur); TReturn (*save_msg)(CoreObject *o, UserRequest *ur); TReturn (*delete_msg)(CoreObject *o, UserRequest *ur); TReturn (*get_sca)(CoreObject *o, UserRequest *ur); TReturn (*set_sca)(CoreObject *o, UserRequest *ur); TReturn (*get_sms_params)(CoreObject *o, UserRequest *ur); TReturn (*set_sms_params)(CoreObject *o, UserRequest *ur);};` | Structure referred by the Telephony server to provide SMS-related services.This structure defines:SMS 'send' function referenceSMS 'read' function referenceSMS 'save' function referenceSMS 'delete' function referenceSMS 'get sca' function referenceSMS 'set sca' function referenceSMS 'get sms params' function referenceSMS 'set sms params' function reference |
+
+### Network Service Operations[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=22)]
+
+The implemenation of the functions described in the following example is required to provide network services.
+
+| Structure | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `struct tcore_network_operations { TReturn (*search)(CoreObject *o, UserRequest *ur); TReturn (*set_plmn_selection_mode)(CoreObject *o, UserRequest *ur); TReturn (*get_plmn_selection_mode)(CoreObject *o, UserRequest *ur); TReturn (*set_service_domain)(CoreObject *o, UserRequest *ur); TReturn (*get_service_domain)(CoreObject *o, UserRequest *ur); TReturn (*set_band)(CoreObject *o, UserRequest *ur); TReturn (*get_band)(CoreObject *o, UserRequest *ur);};` | Structure referred by the Telephony server to provide network services.This structure defines:Network 'search' function referenceNetwork 'set plmn selection mode' function referenceNetwork 'get plmn selection mode' function referenceNetwork 'set service domain' function referenceNetwork 'get service domain' function referenceNetwork 'set band' function referenceNetwork 'get band' function reference |
+
+### HAL operations[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=23)]
+
+The implementation of the functions described in the following example is required to provide HAL operations.
+
+| Structure | Description |
+| ---------------------------------------- | ---------------------------------------- |
+| `struct tcore_hal_operations { TReturn (*power)(TcoreHal *hal, gboolean flag); TReturn (*send)(TcoreHal *hal, unsigned int data_len, void *data); TReturn (*setup_netif)(CoreObject *co, TcoreHalSetupNetifCallback func, void *user_data, unsigned int cid, gboolean enable);};` | Structure referred by Telephony server to provide HAL operations.This structure defines:HAL 'power' function referenceHAL 'send' function referenceHAL 'setup network interface' function reference |
+
+Sample implementations of the modem and modem interface plugins is available in the [Appendix](https://wiki.tizen.org/Tizen_3.0_Porting_Guide#Appendix) section.
+
+## Configuration[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=24)]
+
+There are no specific configurations required for Telephony except for conforming to the installation paths of various Telephony plugins.
+
+All Telephony plugins need to be installed in the following folders:
+
+- Modem Plugins: `%{_libdir}/telephony/plugins/modems/`
+- Other Plugins: `%{_libdir}/telephony/plugins/`
+
+## References[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=25)]
+
+Tizen source website [http://review.tizen.org/git/](http://review.tizen.org/git/)
+
+Telephony packages
+
+- Telephony daemon
+
+
+
+
+- Telephony core library
+
+
+
+
+- TAPI
+
+
+
+
+- Telephony API for a third party application
+
+
+
+
+- Communicator (`DBUS_TAPI`)
+
+
+
+
+- Free Style plugin (indicator)
+
+
+
+
+- Free Style plugin (packetservice)
+
+
+
+
+- Free Style plugin (nitz)
+
+
+
+
+- Free Style plugin (Database)
+
+
+
+
+- Free Style plugin (VCONF)
+
+
+
+
+- Modem plugin (device)
+
+
+
+
+- Modem Interface plugin (device)
+
+
+
+
+- Modem plugin (emulator)
+
+
+
+
+- Modem Interface plugin (emulator)
+
+
+
+## Appendix[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=26)]
+
+#### Sample Implementation for the Modem Interface Plugin[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=27)]
+
+```
+/* HAL Operations */
+static struct tcore_hal_operations hal_ops = {
+ .power = hal_power,
+ .send = hal_send,
+ .setup_netif = hal_setup_netif,
+};
+
+static
+gboolean on_load()
+{
+ dbg(" Load!!!");
+
+ return TRUE;
+}
+
+static
+gboolean on_init(TcorePlugin *plugin)
+{
+ TcoreHal *hal;
+ PluginData *user_data;
+ struct custom_data *data;
+
+ dbg(" Init!!!");
+
+ if (plugin == NULL) {
+ err(" PLug-in is NULL");
+
+ return FALSE;
+ }
+
+ /* User data for Modem Interface plugin */
+ user_data = g_try_new0(PluginData, 1);
+ if (user_data == NULL) {
+ err(" Failed to allocate memory for Plugin data");
+
+ return FALSE;
+ }
+
+ /* Register to eerver */
+ user_data->modem = tcore_server_register_modem(tcore_plugin_ref_server(plugin), plugin);
+ if (user_data->modem == NULL) {
+ err(" Registration Failed");
+ g_free(user_data);
+
+ return FALSE;
+ }
+ dbg(" Registered from Server");
+
+
+ data = g_try_new0(struct custom_data, 1);
+ if (data == NULL) {
+ err(" Failed to allocate memory for Custom data");
+
+ /* Unregister from server */
+ tcore_server_unregister_modem(tcore_plugin_ref_server(plugin), user_data->modem);
+
+ /* Free plugin data */
+ g_free(user_data);
+
+ return FALSE;
+ }
+
+ /* Open DPRAM device */
+ data->vdpram_fd = vdpram_open();
+ if (data->vdpram_fd < 0) {
+ /* Free custom data */
+ g_free(data);
+
+ /* Unregister from server */
+ tcore_server_unregister_modem(tcore_plugin_ref_server(plugin), user_data->modem);
+
+ /* Free plugin data */
+ g_free(user_data);
+
+ return FALSE;
+ }
+ /* Create and initialize HAL */
+ hal = tcore_hal_new(plugin, "vmodem", &hal_ops, TCORE_HAL_MODE_AT);
+ if (hal == NULL) {
+ /* Close VDPRAM device */
+ vdpram_close(data->vdpram_fd);
+
+ /* Free custom data */
+ g_free(data);
+
+ /* Unregister from server */
+ tcore_server_unregister_modem(tcore_plugin_ref_server(plugin), user_data->modem);
+
+ /* Free Plugin data */
+ g_free(user_data);
+
+ return FALSE;
+ }
+ user_data->hal = hal;
+
+ /* Link custom data to HAL user data */
+ tcore_hal_link_user_data(hal, data);
+
+ /* Set HAL as Modem Interface plugin's user data */
+ tcore_plugin_link_user_data(plugin, user_data);
+
+ /* Register to Watch list */
+ data->watch_id_vdpram = __register_gio_watch(hal, data->vdpram_fd, on_recv_vdpram_message);
+ dbg(" fd: [%d] Watch ID: [%d]", data->vdpram_fd, data->watch_id_vdpram);
+
+ /* Power ON VDPRAM device */
+ if (_modem_power(hal, TRUE) == TCORE_RETURN_SUCCESS) {
+ dbg(" Power ON - [SUCCESS]");
+ } else {
+ err(" Power ON - [FAIL]");
+ goto EXIT;
+ }
+
+ /* Check CP Power ON */
+ g_timeout_add_full(G_PRIORITY_HIGH, SERVER_INIT_WAIT_TIMEOUT, __load_modem_plugin, hal, 0);
+
+ dbg("[VMMODEM] Exit");
+
+ return TRUE;
+
+EXIT:
+ /* Deregister from Watch list */
+ __deregister_gio_watch(data->watch_id_vdpram);
+
+ /* Free HAL */
+ tcore_hal_free(hal);
+
+ /* Close VDPRAM device */
+ vdpram_close(data->vdpram_fd);
+
+ /* Free custom data */
+ g_free(data);
+
+ /* Unregister from Server */
+ tcore_server_unregister_modem(tcore_plugin_ref_server(plugin), user_data->modem);
+
+ /* Free plugin data */
+ g_free(user_data);
+
+ return FALSE;
+}
+
+static void
+on_unload(TcorePlugin *plugin)
+{
+ TcoreHal *hal;
+ struct custom_data *data;
+ PluginData *user_data;
+
+ dbg(" Unload!!!");
+
+ if (plugin == NULL)
+ return;
+
+ user_data = tcore_plugin_ref_user_data(plugin);
+ if (user_data == NULL)
+ return;
+
+ hal = user_data->hal;
+
+ data = tcore_hal_ref_user_data(hal);
+ if (data == NULL)
+ return;
+
+ /* Deregister from Watch list */
+ __deregister_gio_watch(data->watch_id_vdpram);
+ dbg(" Deregistered Watch ID");
+
+ /* Free HAL */
+ tcore_hal_free(hal);
+ dbg(" Freed HAL");
+
+ /* Close VDPRAM device */
+ vdpram_close(data->vdpram_fd);
+ dbg(" Closed VDPRAM device");
+
+ /* Free custom data */
+ g_free(data);
+
+ tcore_server_unregister_modem(tcore_plugin_ref_server(plugin), user_data->modem);
+ dbg(" Unregistered from Server");
+
+ dbg(" Unloaded MODEM");
+ g_free(user_data);
+}
+
+/* VMODEM Descriptor Structure */
+EXPORT_API struct tcore_plugin_define_desc plugin_define_desc = {
+ .name = "VMODEM",
+ .priority = TCORE_PLUGIN_PRIORITY_HIGH,
+ .version = 1,
+ .load = on_load,
+ .init = on_init,
+ .unload = on_unload
+};
+
+```
+
+#### Sample Implementation for the Modem Plugin[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=28)]
+
+```
+static
+gboolean on_load()
+{
+ dbg("LOAD!!!");
+
+ return TRUE;
+}
+
+static
+gboolean on_init(TcorePlugin *p)
+{
+ TcoreHal *h;
+
+ dbg("INIT!!!");
+
+ if (!p) {
+ err("Plug-in is NULL");
+
+ return FALSE;
+ }
+
+ h = tcore_server_find_hal(tcore_plugin_ref_server(p), "vmodem");
+ if (!h) {
+ err("HAL is NULL");
+
+ return FALSE;
+ }
+
+ tcore_hal_add_send_hook(h, on_hal_send, p);
+ tcore_hal_add_recv_callback(h, on_hal_recv, p);
+
+ /* Initialize Modules */
+ s_modem_init(p, h);
+ s_network_init(p, h);
+ s_sim_init(p, h);
+ s_ps_init(p, h);
+ s_call_init(p, h);
+ s_ss_init(p, h);
+ s_sms_init(p, h);
+ tcore_hal_set_power(h, TRUE);
+
+ /* Send "CPAS" command to invoke POWER UP NOTI */
+ s_modem_send_poweron(p);
+
+ dbg("Init - Successful");
+
+ return TRUE;
+}
+
+static void
+on_unload(TcorePlugin *p)
+{
+ TcoreHal *h;
+
+ dbg("UNLOAD!!!");
+
+ if (!p) {
+ err("Plug-in is NULL");
+
+ return;
+ }
+
+ h = tcore_server_find_hal(tcore_plugin_ref_server(p), "vmodem");
+ if (h) {
+ tcore_hal_remove_send_hook(h, on_hal_send);
+ tcore_hal_remove_recv_callback(h, on_hal_recv);
+ }
+
+ /* Deinitialize the modules */
+ s_modem_exit(p);
+ s_network_exit(p);
+ s_sim_exit(p);
+ s_ps_exit(p);
+ s_call_exit(p);
+ s_ss_exit(p);
+ s_sms_exit(p);
+}
+
+/* ATMODEM plug-in descriptor */
+struct tcore_plugin_define_desc plugin_define_desc = {
+ .name = "ATMODEM",
+ .priority = TCORE_PLUGIN_PRIORITY_MID,
+ .version = 1,
+ .load = on_load,
+ .init = on_init,
+ .unload = on_unload
+};
+
+```
+
+#### Workflow[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=29)]
+
+1. Initialization sequence
+
+ 1. The server loads the modem interface plugin.
+ 2. The modem interface plugin registers to the server.
+ 3. The server enumerates the modem interface plugin.
+ 4. Create the physical HAL.
+ 5. The modem interface plugin queries the modem state.
+ 6. If the modem is online, the CMUX (internal) channels are established.
+ 7. The logical HAL is created for each CMUX channel and assigned for a core object type. These are updated to the mapping table.
+ 8. Change the physical HAL mode to `TRANSPARENT` (disables the queue).
+ 9. The modem interface plugin requests server to load the modem plugin (corresponding to its architecture).
+ 10. The server loads modem plugin.
+ 11. The modem plugin initializes the sub-modules and creates the core objects (based on the core object types defined in the mapping table by the modem interface plugin).
+ 12. The modem plugin notifies the server of the `PLUGIN_ADDED` event.
+ 13. The modem notifies the communicator of the `PLUGIN_ADDED` event.
+ 14. The communicator creates interfaces for the sub-modules present (based on the core objects created).
+
+2. Request processing sequence
+
+ 1. The application request is sent to the communicator through TAPI.
+ 2. The communicator creates a user request based on the incoming request.
+ 3. The user request is dispatch to communicator.
+ 4. The communicator dispatches user request to server.
+ 5. The server finds the plugin based on the modem name.
+ 6. The server extracts the core object type based on the request command from plugin’s core objects list.
+ 7. The server dispatches the user request to the core object.
+ 8. The core object dispatches the user request to dispatch a function based on the request command.
+ 9. Pending request is formed, added to the queue, and sent to the logical HAL assigned for the core object.
+ 10. The logical HAL dispatches the request data to a CMUX channel dedicated to it.
+ 11. CMUX encodes the request data and dispatches it to the physical HAL.
+ 12. The physical HAL sends the request data to the modem.
+
+3. Response processing sequence
+
+ 1. Response data sent by the modem is received by the physical HAL.
+ 2. The physical HAL dispatches the response data to CMUX.
+ 3. CMUX decodes the received response data and dispatches the corresponding logical HAL based on the CMUX channel.
+ 4. The logical HAL dispatches the decoded response data to the corresponding core object.
+ 5. The core object processes the received response data and extracts the user request from the pending queue and sends the response data corresponding to the user request.
+ 6. The user request extracts the communicator.
+ 7. The received response data is sent to the corresponding communicator.
+ 8. The communicator sends the response data to TAPI which communicates the response to application.
+
+4. Indication processing sequence
+
+ 1. Notification data sent by the modem is received by the physical HAL.
+ 2. The physical HAL dispatches the notification data to CMUX.
+ 3. CMUX decodes the received notification data and dispatches the corresponding logical HAL based on the CMUX channel registered for the notification.
+ 4. The logical HAL dispatches the decoded notification data to the corresponding core object that registered for the notification.
+ 5. The core object processes the received notification data and dispatches to the server.
+ 6. The server dispatches the notification data to corresponding communicator.
+ 7. The communicator sends the notification data to TAPI, which communicates the same to the application.
+
+
+# Application[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=30)]
+
+Tizen supports both core and reference [applications](https://wiki.tizen.org/Applications). The core applications are developed with platform internal interfaces, such as Enlightenment Foundation Libraries ([EFL](https://wiki.tizen.org/EFL)) and other 3rd party libraries. The reference applications are developed with Tizen native APIs.
+
+The following table shows whether the core and reference versions of the preloaded sample applications are supported by default on the [Emulator](https://wiki.tizen.org/Emulator) and target device.
+
+| Application name | Emulator | Target | | |
+| ---------------- | --------------------- | ---------------- | --------------------- | ---- |
+| Core application | Reference application | Core application | Reference application | |
+| Calculator | No | Yes | Yes | No |
+| Calendar | No | Yes | Yes | No |
+| CalendarService | No | Yes | Yes | No |
+| Camera | No | Yes | Yes | No |
+| Clock | No | Yes | Yes | No |
+| Contacts | No | Yes | Yes | No |
+| Email | No | Yes | Yes | No |
+| Gallery | No | Yes | Yes | No |
+| Home | Yes | No | Yes | No |
+| ImageViewer | No | Yes | Yes | No |
+| Internet | No | Yes | No | Yes |
+| Lock | Yes | No | Yes | No |
+| Memo | No | Yes | Yes | No |
+| Messages | No | Yes | Yes | No |
+| MusicPlayer | No | Yes | Yes | No |
+| MyFiles | No | Yes | Yes | No |
+| Phone | No | Yes | Yes | No |
+| Settings | No | Yes | Yes | No |
+| VideoPlayer | No | Yes | Yes | No |
+
+## Configuration[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Application&action=edit§ion=T-1)]
+
+You can switch a preloaded sample application between core and reference applications using the [MIC image creator](https://source.tizen.org/documentation/reference/mic-image-creator). To switch the application, remove the preloaded application package and add the new package image with the correct name. The following table shows the core and reference application image names of the preloaded sample applications.
+
+| Application name | Core application | Reference application |
+| ---------------- | --------------------------- | ---------------------- |
+| Calculator | `org.tizen.calculator` | `apps.Calculator` |
+| Calendar | `org.tizen.calendar` | `apps.Calendar` |
+| CalendarService | `org.tizencalendar-service` | `apps.CalendarService` |
+| Camera | `org.tizen.camera-app` | `apps.Camera` |
+| Clock | `org.tizen.clock` | `apps.Clock` |
+| Contacts | `org.tizen.contacts` | `apps.Contacts` |
+| Email | `org.tizen.email` | `apps.Email` |
+| Gallery | `org.tizen.gallery` | `apps.Gallery` |
+| Home | `org.tizen.menu-screen` | `apps.Home` |
+| ImageViewer | `org.tizen.image-viewer` | `apps.ImageViewer` |
+| Internet | `org.tizen.browser` | `apps.Internet` |
+| Lock | `org.tizen.lockscreen` | `apps.Lock` |
+| Memo | `org.tizen.memo` | `apps.Memo` |
+| Messages | `org.tizen.message` | `apps.Messages` |
+| MusicPlayer | `org.tizen.music-player` | `apps.MusicPlayer` |
+| MyFiles | `org.tizen.myfile` | `apps.MyFiles` |
+| Phone | `org.tizen.call` | `apps.Phone` |
+| Settings | `org.tizen.setting` | `apps.Settings` |
+| VideoPlayer | `org.tizen.video-player` | `apps.VideoPlayer` |
+
+# Appendix[[edit](https://wiki.tizen.org/index.php?title=Tizen_3.0_Porting_Guide&action=edit§ion=31)]
+
+## NFC OAL API[[edit](https://wiki.tizen.org/index.php?title=Porting_Guide/Appendix&action=edit§ion=T-1)]
+
+| Function | Description | Parameter |
+| ---------------------------------------- | ---------------------------------------- | ---------------------------------------- |
+| `net_nfc_oem_controller_init init;` | Initializes the NFC chip. | `net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_deinit deinit;` | Deinitializes the NFC chip. | None |
+| `net_nfc_oem_controller_register_listener register_listener;` | Registers a callback function for a tag event, SE event, and llcp event. | `target_detection_listener_cb target_detection_listener`: The tag event callback function`se_transaction_listener_cb se_transaction_listener`: The SE event callback function`llcp_event_listener_cb llcp_event_listener`: The llcp event callback function`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_unregister_listener unregister_listener;` | Releases a callback function for a tag event, SE event, and llcp event. | None |
+| `net_nfc_oem_controller_check_firmware_version check_firmware_version;` | Checks the firmware version of the NFC chip. | `net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_update_firmware update_firmware;` | Updates the NFC chip firmware. | `net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_get_stack_information get_stack_information;` | Gets the list of supported tags and the current firmware version. | `net_nfc_stack_information_s`: Pointer value to get the information of support tags and the current firmware version`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_configure_discovery configure_discovery;` | Delivers the config information on discovery. | `net_nfc_discovery_mode_e`: The start/stop mode`net_nfc_event_filter_e config`: The information for tag filtering`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_get_secure_element_list get_secure_element_list;` | Gets the information of the current secure element. | `net_nfc_secure_element_info_s`: The pointer value to get secure element information`int`: The pointer value to get the count of the secure element`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_set_secure_element_mode set_secure_element_mode;` | Sets the secure element to use. | `net_nfc_secure_element_type_e`: Secure element information`net_nfc_secure_element_mode_e`: The mode information to set`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_connect connect;` | Connects to the detected tag/target. | `net_nfc_target_handle_s`: The tag/target handle for connecting`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_connect disconnect;` | Disconnects the connected tag/target. | `net_nfc_target_handle_s`: The tag/target handle for disconnecting`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_check_ndef check_ndef;` | Checks the tag to for ndef support. | `net_nfc_target_handle_s`: The tag handle to check ndef`int`: The max size supported in the tag`int`: The real data size saved in the tag`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_check_target_presence check_presence;` | Checks if a tag exist in the RF range. | `net_nfc_target_handle_s`: The tag handle to check presence`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_read_ndef read_ndef;` | Reads ndef data in a tag. | `net_nfc_target_handle_s`: The tag handle to read`data_s`: The pointer value to save the ndef data`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_write_ndef write_ndef;` | Writes the data to the tag. | `net_nfc_target_handle_s`: The handle to write`data_s`: The data to write`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_make_read_only_ndef make_read_only_ndef;` | Makes the tag to a read only tag. | `net_nfc_target_handle_s`: The target tag handle`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_transceive transceive;` | Sends and receives the low command to the tag or target. | `net_nfc_target_handle_s`: The tag or target handle to transceive`net_nfc_transceive_info_s`: The pointer value included command or data to send and data to receive`data_s`: The pointer value to send the information of context`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_format_ndef format_ndef;` | Formats the tag. | `net_nfc_target_handle_s`: The tag handle to format`data_s`: The key value to send the tag for formatting`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_exception_handler exception_handler;` | When the `nfc-manager` faces an unwanted exception, it tries to deinitialize and initialize the stack before unregistering and registering the callback function. | None |
+| `net_nfc_oem_controller_is_ready is_ready;` | Checks the status of the NFC stack. | `net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_config config_llcp;` | Sets the llcp configuration (miu, lto, wks, option). | `net_nfc_target_handle_s`: The target handle to set llcp`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_check_llcp check_llcp_status;` | Checks the llcp configuration (miu, lto, wks, option). | `net_nfc_target_handle_s`: The target handle to check llcp`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_activate_llcp activate_llcp;` | Activates the llcp functionality. | `net_nfc_target_handle_s`: The target handle to activate`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_create_socket create_llcp_socket;` | Creates the llcp socket | `net_nfc_llcp_socket_t`: The pointer value to receive the socket information`net_nfc_socket_type_e socketType`: The type of socket to create`uint16_t miu`: The miu value`uint8_t rw`: The rw value`net_nfc_error_e`: Returns an error code on failure.`void`: The value to control the context (can be set to `NULL`) |
+| `net_nfc_oem_controller_llcp_bind bind_llcp_socket;` | Binds the socket. | `net_nfc_llcp_socket_t socket`: The information about the socket to bind`uint8_t service_access_point`: The information of access point to bind`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_listen listen_llcp_socket;` | Sets the socket to listen. | `net_nfc_target_handle_s`: The target handle`uint8_t`: The service name to listen`net_nfc_llcp_socket_t socket`: Socket information`net_nfc_error_e`: Returns an error code on failure.`void`: The value to control the context (can be set to `NULL`) |
+| `net_nfc_oem_controller_llcp_accept accept_llcp_socket;` | Accepts the connect request in listening status. | `net_nfc_llcp_socket_t socket`: Socket information to accept`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_connect_by_url connect_llcp_by_url;` | Connects the server with the service name. | `net_nfc_target_handle_s`: The handle of the target to connect`net_nfc_llcp_socket_t socket`: Socket information`uint8_t`: Service name to connect`net_nfc_error_e`: Returns an error code on failure.`void`: The value to control the context (can be set to `NULL`) |
+| `net_nfc_oem_controller_llcp_connect connect_llcp;` | Connects to the server with access point (port number). | `net_nfc_target_handle_s`: The target handle`net_nfc_llcp_socket_t socket`: Socket information`uint8_t service_access_point`: Access point number`net_nfc_error_e`: Returns an error code on failure.`void`: The value to control the context (can be set to `NULL`) |
+| `net_nfc_oem_controller_llcp_disconnect disconnect_llcp;` | Disconnects the llcp link. | `net_nfc_target_handle_s`: Socket information to disconnect`net_nfc_llcp_socket_t socket`: The information of the socket to disconnect`net_nfc_error_e`: Returns an error code on failure.`void`: The value to control the context (can be set to `NULL`) |
+| `net_nfc_oem_controller_llcp_socket_close close_llcp_socket;` | Closes the llcp socket. | `net_nfc_llcp_socket_t socket`: Socket information to close`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_recv recv_llcp;` | Receives the data using the llcp link. | `net_nfc_target_handle_s`: The target handle to receive`net_nfc_llcp_socket_t socket`: Socket information to receive`data_s`: The pointer value to receive the data`net_nfc_error_e`: Returns an error code on failure.`void`: The value to control the context (can be set to `NULL`) |
+| `net_nfc_oem_controller_llcp_send send_llcp;` | Sends the data using llcp link. | `net_nfc_target_handle_s`: The target handle to send`net_nfc_llcp_socket_t socket`: Socket information to send`data_s`: The data to send`net_nfc_error_e`: Returns an error code on failure.`void`: The value to control the context (can be set to `NULL`) |
+| `net_nfc_oem_controller_llcp_recv_from recv_from_llcp;` | Rejects the connect request from the client socket. | `net_nfc_target_handle_s`: The target handle to reject`net_nfc_llcp_socket_t socket`: The socket information to reject`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_send_to send_to_llcp;` | Sends the data using the service access point. | `net_nfc_target_handle_s`: The peer target handle`net_nfc_llcp_socket_t socket`: The socket information`data_s`: The data to send`uint8_t service_access_point`: The service access point to send`net_nfc_error_e`: Returns an error code on failure.`void`: The value to control the context (can be set to `NULL`) |
+| `net_nfc_oem_controller_llcp_reject reject_llcp;` | Rejects the connect request from the client socket. | `net_nfc_target_handle_s`: The target handle to reject`net_nfc_llcp_socket_t socket`: The socket information to reject`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_get_remote_config get_remote_config;` | Gets te llcp socket config information of the peer device. | `net_nfc_target_handle_s`: The peer target handle`net_nfc_llcp_config_info_s`: The pointer value to get config information of peer device's llcp socket`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_llcp_get_remote_socket_info get_remote_socket_info;` | Gets the llcp socket information of the peer device. | `net_nfc_target_handle_s`: The peer target handle`net_nfc_llcp_socket_t socket`: The llcp socket information`net_nfc_llcp_socket_option_s`: The pointer value to save the information of remote socket`net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_sim_test sim_test;` | Tests the SWP link with SIM and NFC chipset. | `net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_test_mode_on test_mode_on;` | Changes the NFC chip to test mode. (Test mode exists only in the NXP case. If there are none, it does not need to implemented.) | `net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_test_mode_off test_mode_off;` | Changes the status of the NFC chip from test mode to normal mode. (Test mode exists only in the NXP case. If there are none, it does not need to implemented.) | `net_nfc_error_e`: Returns an error code on failure. |
+| `net_nfc_oem_controller_support_nfc support_nfc` | Checks each the device file of each chip. | If the device file is not found, the function returns `NET_NFC_NOT_SUPPORTED`. |
\ No newline at end of file
diff --git a/open_source/reference.md b/open_source/reference.md
new file mode 100755
index 0000000000..f5b339f1e1
--- /dev/null
+++ b/open_source/reference.md
@@ -0,0 +1,16 @@
+# Reference
+
+This section contains more detailed information for Tizen development.
+We recommend reading the [Development Workflow](https://source.tizen.org/documentation/work-flow) and [Developer Guide](https://source.tizen.org/documentation/developer-guide) pages first.
+
+[Git Build System Guide](https://source.tizen.org/documentation/reference/git-build-system/)
+More information for using GBS (git-build-system)
+
+[MIC Image Creator Guide](https://source.tizen.org/documentation/reference/mic-image-creator)
+How to download MIC source code and use MIC commands
+
+[Gerrit Usage](https://source.tizen.org/documentation/reference/gerrit-usage)
+More tips for using gerrit system
+
+[Flash to Device](https://source.tizen.org/documentation/reference/flash-device)
+Describes, in more detail, how to flash an image to a lunchbox device
\ No newline at end of file
diff --git a/open_source/release/tizen_3_0_m2.md b/open_source/release/tizen_3_0_m2.md
new file mode 100755
index 0000000000..75a5ed2076
--- /dev/null
+++ b/open_source/release/tizen_3_0_m2.md
@@ -0,0 +1,666 @@
+Release Date: 18 Jan, 2017
+
+The Tizen 3.0 adopts various new features such as high performance graphics, latest web technology, intensified security, and multi-user supports.
+
+
+
+## Release Notes
+
+### System (Kernel and System Framework)
+
+**New and Changed Features**
+
+- Systemd/Service initialization time enhancement
+- First service launch time has been improved by optimizing the unit/smack initialization time.Service initialization time has been improved by utilizing tmpfiled.
+- Directory hierarchy enhancement and compatibility support
+- System directory structure has been refined to support read-only directories and multi-user.Hard-coded path in the source code has been removed.Support for a platform default user has been added.Support for 2.4 contents and application directories has been added.
+- Storage API and block module enhancement
+ - USB/SD Card external storage has been enumerated with the libstorage API.Support for multiple partitions and devices has been added.Block dbus connection has been separated to a special-purpose block module.
+- Device HAL upgrade
+ - Common device HAL structure has been added.USB configfs is supported.Default device adaptation layer for a standard kernel interface has been added.
+- Power management enhancement
+ - Dynamic power state transition has been added.Power state actor for supporting several profiles and devices has been added.
+- Debug and fail-safe handling system enhancement
+ - New kmsg and pipe log backend have been added.The kmsg, pipe, android logger backends are supported.Runtime watchdog functionality has been added.Callstack generation based on ptrace is supported optionally to eliminate the double crash issue.
+- Feedback system enhancement
+ - Feedback daemon to support multiple patterns has been added.Various patterns are supported, such as combination of duration and waiting.
+- System information enhancement
+ - GDBM backend to support a light-weight system registry to improve performance has been added.
+- Cynara-based dbus policy support through dbus-daemon
+ - Privilege-based access check has been added.
+- New APIs
+ - IR device APIs have been added.
+ - USB Host APIs have been added.
+ - Battery and charger status APIs have been added.
+ - Detailed build information has been added.
+ - CPU frequency APIs have been added.
+ - Storage change event handler API has been added.
+- Major open source upgrade and changes
+ - Systemd version has been upgraded from v216 to v219.
+ - Pwdutils has been replaced with shadow-utils.
+ - Libfuse version has been upgraded to 2.9.6.
+ - Fsck-msdos and newfs-msdos have been separated from deviced.
+ - The libdbus version has been upgraded to 1.10.6.
+ - In TV, the kdbus version has been upgraded to V4
+
+### System (Base)
+
+**New and Changed Features**
+
+- Base library upgrade
+ - Address sanitizer building is supported.
+ - ICU binary data file has been changed to text data file.
+ - unzip has been patched for CVE-2015-7697.
+ - expat version has been upgraded to 2.2.0.
+ - CVE-2016-4472
+ - iniparser version has been upgraded to 3.2.
+
+
+- System-settings API enhancement
+ - Functions for adding or deleting string-list type data for ringtone-list (internal json handling) has been added.
+- i18n (base-utils) API enhancement
+ - Detect host time zone function has been added.
+ - Ucalendar wrapper API has been added.
+ - Utmscale wrapper API has been added.
+ - Ushape wrapper API has been added.
+ - Ubidi wrapper API has been added.
+- Vconf-internal-keys one-branch policy adoption
+ - Type check XML scheme validation for ‘type’ specifier at build-time has been added.
+ - ‘layer’ by automation has been removed.
+- tzdata-update parser plugin has been added.
+ - Support for updating tzdata at runtime by downloadable application has been added.
+
+### Application Framework
+
+**New and Changed Features**
+
+- Application
+ - New event API to keep last event data has been added.
+ - Support for text input delegation has been added.
+ - Several new operations have been added.
+- Application IPC
+ - Data-control data change notification API has been added.
+ - Support for Data control bulk management has been added.
+- Application package installer
+ - The optional mount installation feature has been added.
+ - Separate permission for users for installing global applications and user-private applications has been added. Only admin users can install global applications.
+ - Support for listening for the disable/enable application event has been added.
+ - New filter property for application information has been added.
+- Application launcher
+ - Application background launch mode has been added.
+ - Support for color-depth for a splash screen has been added.
+- Notification
+ - Support for direct reply has been added.
+ - Support for notification template has been added.
+- Widget
+ - Support for multiple widget feature has been added.
+ - Widget framework has been rewritten to support multiple viewer concept.
+
+As a common feature, multi-user support has been added.
+
+### Window System
+
+**New and Changed Features**
+
+- Extended Wayland Protocols
+ - tizen_screen_rotation allows the display server to let a client ignore the output transform.
+ - tizen_screenshooter is extended to support the auto rotation for the screen capture.
+ - tizen_video_object is extended to control the video object’s visibility in regard to the topmost window.
+ - tizen_remote_surface has a new mouse in/out event and render request for the provider.
+ - tizen_launch has been added to apply the client window’s effect type according to the launch state.
+ - tizen_visibility has added a pre_unobscured state for the window’s visibility.
+ - tizen_screen_rotation has been added to support screen rotation.
+
+
+- Enlightenment Wayland Display Server
+ - Mouse in/out event creation and render request on provider demand are supported for a remote surface client.
+ - A transition effect according to the launching client window’s type is applied using tizen_launch.
+ - A tws_dummy_extension handler for tizen-ws-shell extensibility has been added.
+ - Support for the screen rotation has been added.
+ - A commit is performed for each tdm layer instead of committing a TDM output.
+ - The debugging tools are extended for:
+ - Plane state
+ - Pending commit
+- wayland-tbm
+ - Support has been added for checking the hardware compositing state of the client for front buffer rendering.
+- libpepper-evdev
+ - The libpepper-evdev library reads events from input device nodes, such as /dev/input/eventX, and creates pepper input events.
+ - The library currently only processes a key event and creates a pepper keyboard event.
+- libpepper-keyrouter
+ - The libpepper-keyrouter library initializes the keyrouter in a pepper server and deals with keyrouter protocol requests from clients.
+ - The library gets a key grab request from a client and sends 1 or more grabbed keys to the clients through the wl_keyboard protocol interface.
+- Tizen ws Shell
+ - A new tzsh_quickpanel_extension_get API has been added for extensibility.
+- efl-util
+ - Input generation with a specified device has been added:
+ - A new efl_util_input_initialize_generator_with_name() API has been added.
+ - The existing input generation API provides event generation with a predefined device name, such as "Input Generator".
+ - The new API provides input generation with the device name provided from a client.
+ - When a specific device name is needed, the new API can be utilized to simulate the device completely.
+ - Support has been added for auto-rotating the screen capture image:
+ - efl_util_screenshot_set_auto_rotation()/
+ efl_util_screenshot_get_auto_rotation()
+- Tizen HAL
+ - Tizen display HAL
+ - Support has been added for the layer commit to ensure an output commit per each vblank:
+ - “TDM_COMMIT_PER_VBLANK” environment
+ - Support has been added for controlling the client vblank fps in runtime.
+ - Support has been added for the protocol trace between the TDM server and client.
+ - Tizen buffer HAL
+ - Support has been added for the setting/getting function for the DRM file descriptor to share it between TDM and TBM.
+ - New error enumeration has been added for the TBM surface queue:
+ - TBM_SURFACE_QUEUE_ERROR_ALREADY_EXIST
+ - TBM_SURFACE_QUEUE_ERROR_UNKNOWN_SURFACE
+ - Support has been added for the can-dequeue callback to let the user know when a TBM surface queue buffer can be dequeued.
+ - Support has been added for buffering the TBM surface queue trace when the state is changed.
+ - Support has been added for the capture of the TBM surface to a file.
+ - Tizen EGL porting layer
+ - New APIs have been added to wayland-egl to support the prerotation feature:
+ - wl_egl_window_set_rotation
+ - wl_egl_window_get_capabilities
+ - The behavior associated with the tpl_surface_set_frontbuffer_mode API has been changed to proper front buffer rendering.
+
+**Fixes**
+
+- Tizen HAL
+ - The TDM vblank wrong behavior has been fixed.
+ - The TDM buffer management functionality, which caused screen tearing, has been fixed.
+ - The TDM thread deadlock bug has been fixed.
+- Enlightenment Wayland Display Server
+ - The bug about the screen flickering when hardware compositing mode is changed has been fixed.
+ - The window rotation abnormal behavior has been fixed.
+ - The floating window’s move/resize abnormal behavior has been fixed.
+ - The notification window’s stack mismatch has been fixed.
+ - The visibility disorder due to the wrong calculation of the window region during the client launch has been fixed.
+ - The synchronization between a server and client in the ‘copy and paste’ feature has been fixed.
+ - The move/resize bug in the system cursor image has been fixed.
+
+### Graphics Engine
+
+**New and Changed Features**
+
+- DALi (3D UI Toolkit)
+ - Actor and Stage
+
+ - A top margin size has been added to Stage.
+ - A sibling order property has been added to Actor.
+ - An opacity property has been added to Actor.
+ - Support for the enumeration setting in various properties has been added to Actor.
+ - A property to allow an actor to ignore the anchor point for its position has been added to Actor.
+ - New Raise and Lower APIs have been added to Actor.
+ - A visibility change signal has been added to Actor.
+ - Layer::TREE_DEPTH_MULTIPLIER has be deprecated.
+ - Property
+ - Chaining support for Property::Array has been added.
+ - Properties have been changed to update a value synchronously.
+ - Image
+ - Support for the GIF image has been added.
+ - Window
+ - Support for focus control has been added.
+ - Support for visibility control has been added.
+ - Support for the auxiliary hint has been added.
+ - Support for the notification level, screen mode, and brightness has been added.
+ - Key event and input
+ - Support for the device name and device class of the key event has been added.
+ - Various new APIs have been added to IMF Manager.
+ - Control and Visual
+ - TextVisual has been added.
+ - AnimatedImageVisual has been added.
+ - Support for stylable transitions has been added.
+ - Memory consumption of ImageVisual has been reduced.
+ - Position and size properties have been added to Visual.
+ - The Button control has been changed to use Visuals.
+ - Support for the ItemView layout customization through properties has been added.
+ - Tooltip functionality has been added to Control.
+ - Support for focus control of the nested TableView control has been added.
+ - Support for the vertical scroll animation on text input has been added.
+ - Keyboard navigation properties have been added to Control.
+ - A border size property has been added to ImageVisual.
+ - Support for a custom keyboard focus algorithm has been added.
+ - A property to hide input text has been added to TextField.
+ - Support for asynchronous remote image loading has been added to ImageVisual.
+ - The key event propagation rule has been changed.
+ - A property to set a pixel size has been added to text controls.
+ - A property to enable an ellipsis has been added to TextLabel.
+ - Properties to control text auto-scrolling have been added to TextLabel.
+ - 3D rendering and animation
+ - Support for the animation of Renderer properties when offstage has been added.
+ - NUI (C# interface)
+ - DALi was originally developed in C++, then subsequently developed in parallel in C#. A separate Tizen NUI branch was created from this C# DALi branch.
+ - More than 400 easy-to-use C# properties are newly added and bound to DALi native properties.
+ - C# events are implemented and bound by the native signal/slot mechanism, which enables event chaining through the “+=” operator.
+ - DisposeQueue has been added to release automatically unmanaged resources bound to DALi native objects.
+ - The key navigation rule is enhanced by FocusManager and CustomKeyAlgorithmInterface.
+ - New high-level classes, which provide useful functionalities and easy interfacing to users, have been added. For example, Color, Size2D, and RelativeVector.
+ - The Animation APIs are revised to improve usability.
+ - NUIApplication has been added to inherit from the UICoreApplication class, which provides the Tizen C# application main loop and life-cycle event handling scheme.
+ - The VisualView high-level class has been added to improve the DALi native Visual usability.
+ - The overall class hierarchy and structure have been changed compared to native DALi.
+ - Actor has been obsoleted and merged into View, which is to be the basis of NUI.
+ - Stage has been removed and merged into Window, where only Layer can be added.
+ - Main classes:
+ - Animation: Can be used to animate the properties of any number of objects, typically View.
+ - FlexContainer: Provides a more efficient way to lay out, align, and distribute space among items in the container.
+ - FocusManager: Provides the functionality of handling key navigation and maintaining the 2-dimensional key focus chain.
+ - Layer: Provides a mechanism for overlaying View groups on top of each other.
+ - View: Is the primary object with which NUI applications interact. UI components can be built by combining multiple Views.
+ - CustomView: Is a base class for the user to customize UI components.
+ - ImageView: Used to display an image resource.
+ - TextEditor: Provides a multi-line editable text editor.
+ - PushButton: Changes its appearance according to its input events.
+ - Window: Is used internally for drawing and managing Layers.
+- Evas Render Engine
+ - Evas GL Render threading
+ - Evas GL Render threading has been added and is on by default.
+ - TBM surface ROI mode
+ - The adjusting ROI mode for the TBM surface has been changed from auto to users.
+ - EvasGL
+ - OpenGL® ES 3.2
+ - Support for OpenGL® ES 3.2 has been added.
+ - OpenGL® ES 3.2 wrapper functions have been added in Evas_GL.h.
+ - EVAS_GL_DEBUG for creating debug eglContext has been added to Evas_GL_Context_Version.
+ - SDL
+ - Support for the 32-bit depth window has been added.
+
+**Fixes**
+
+- DALi
+ - The hit test has been fixed to include clipping actors as well as their children.
+ - The bug in texture where Upload without parameters was incorrectly using the Texture size rather than the PixelData size has been fixed.
+ - The bugs in TextureSet have been fixed.
+ - The target value bug of the animation only set on Animation::Play() has been fixed.
+ - Inconsistency of the scene graph and render items has been fixed.
+ - The mismatch between the GetTargetSize method and the Size property of Actor has been fixed.
+ - The bug that caused a crash when the key is up on a Text control has been fixed.
+ - The full progress image is now shown when 100%. The bug has been fixed.
+- Evas Render Engine Enhancement
+ - stride_get has now been implemented for the TBM surface in the Evas GL Engine.
+ - The bug of the rotated image in an Evas object image has been fixed.
+ - The memory leak in the Evas object image’s rotation function has been fixed.
+ - The partial rendering buf in the TBM backend has been fixed.
+ - The bug that caused smooth rendering about GL_TEXTURE_EXTERNAL_OES to not work has been fixed.
+ - The missed macro of GLES 3.1 has been fixed.
+ - The memory leak of various data (internal data, FD, Wayland buffer) in Ecore Evas extern has been fixed.
+
+**Known Issues**
+
+- EvasGL
+ - When MSAA is used, depth/stencil buffer is not created.
+ - In EvasGL 3.2, context with robustness is not supported yet, because no drivers support this feature in Tizen devices. When driver support becomes available, this feature is added in EvasGL.
+
+
+### UI Framework
+
+**New and Changed Features**
+
+- EFL Upgrade (from 1.13 to 1.16)
+
+ - Wayland-backed is enabled.
+ - efl-misc replaces elm-misc.
+ - efl-modules replaces elm-modules.
+ - e17-extra-config-modules is removed.
+ - A new efl-config daemon configures scalable UI setting at boot time.
+ - Notify style name of popup has been changed (popup à popup/default).
+ - The default scroller of popup has been removed. (The application must call the elm_popup_scrollable_set(popup, EINA_TRUE) function.)
+ - Item style of ctxpopup has been changed. (Use the list item rather than box.)
+ - The minimum size of a genlist item is not defined. (If necessary, the application must specify the minimum size of the genlist item by itself.)
+ - In mobile, the default theme is refined.
+ - In mobile, LazEDC and color class have been applied to default theme.
+ - EDC support for SVG files has been added.
+ - EFL vector support GL backend as well as SW backend have been added
+
+- In mobile, CBHM (ClipBoard History Manager) has been integrated.
+- In mobile, view manager has been added.
+- Customization APIs have been added.
+- Text Input
+ - Input framework has been changed from X-based to Wayland-based.
+ - In mobile, 3 new input languages have been added (Irish, Uzbek and Hindi).
+ The supported languages are:
+ Azerbaijani, Bulgarian, Catalan, Czech, Danish, Greek, German, English (US), Spanish, Estonian, Basque, Finnish, French, Irish, Galician, Croatian, Hungarian, Armenian, Icelandic, Italian, Japanese, Georgian, Kazakh, Korean, Lithuanian, Latvian, Macedonian, Norwegian, Dutch, Polish, Portuguese, Romanian, Russian, Slovak, Slovenian, Serbian, Swedish, Turkish, Ukrainian, Uzbek, Chinese, Chinese (Hong Kong), Chinese (Taiwan), Hindi, and Albanian
+ - The scim-launcher process has been integrated to scim-helper-launcher process.
+ - In wearable, the input delegator window has been added.
+ - Synchronous get_surrounding_text() API support has been added.
+- Voice Interaction
+ - Speech To Text feature is enabled.
+ - The server based Speech To Text engine is included as a default engine.
+ - Support for a 3rd party Speech To Text / Text To Speech engine has been added..
+ - Support the voice control framework has been added.
+ - The supported languages of the TTS engine have been extended to 28 languages.
+ The supported languages are:
+ English (US), English (UK), English (India), Korean, Spanish, Mexican Spanish, French, German, Italian, Russian, Brazilian Portuguese, Portugal Portuguese, Chinese, Chinese (Hong Kong), Chinese (Taiwan), Japanese, Hindi, Czech, Dutch, Danish, Finnish, Greek, Hungarian, Norwegian, Polish, Slovak, Swedish, and Turkish
+
+**Fixes**
+
+- Many bugs have been resolved.
+
+**Known Issues**
+
+- EFL
+
+ - EFL abort on errors are enabled by default.
+ - Joystick does not work temporarily.
+
+- Accessibility
+
+ - ScreenReader functionality has not been fully tested.
+
+- Clipboard
+
+ - CBHM (ClipBoard History Manager) has not been fully tested.
+
+- View manager
+
+ - View manager has not been fully tested.
+
+- Customization API
+
+ - In wearable, the theme is not ready for customization.
+
+- Focused UI has not been fully tested.
+
+- UI mirroring has not been fully tested.
+
+- Tizen 3.0 UX has not been fully implemented, especially for visual interactions.
+
+### Multimedia Framework
+
+**New and Changed Features**
+
+- Recorder
+ - APIs for getting muxed stream data have been added.
+- Media Content
+ - A new API for getting video rotation information has been added.
+ - A new API for getting/setting the bookmark name has been added.
+ - APIs for updating file metadata (such as title, album, artist, and genre) have been deprecated.
+ - The API for getting the storage name has been deprecated.
+ - The cloud-related code has been deprecated.
+- Thumbnail Utility
+ - A new error type has been added.
+- Open Source Upgrade
+ - Tiff version has been upgraded from 4.0.6 to 4.0.7.
+- Player
+ - APIs for progressive download have been deprecated.
+ - The display type has been replaced with a new value.
+ - New error codes have been added.
+- Audio
+ - The SoundServer WAV handling logic has been improved by replacing the legacy parser and libtremo with libsndfile.
+- MediaTool
+ - A new media format has been added.
+ - A new API for setting extra data has been added.
+
+
+### Network and Connectivity
+
+**New and Changed Features**
+
+- Data Network
+ - New features and APIs have been added:
+ - In mobile, wearable, and TV profiles, a new connection API for getting the DHCP server address has been added.
+ - In mobile, wearable, and TV profiles, the enum for the pdn type has been deprecated.
+ - In mobile, wearable, and TV profiles, connection APIs for adding/removing a routing table have been added.
+ - In the TV profile, connection APIs for attaching/detaching an Ethernet cable have been deprecated/added.
+ - In mobile, wearable, and TV profiles, APIs for getting/setting the DNS config type have been added.
+ - In mobile, wearable, and TV profiles, connection and wifi-manager APIs for getting/setting the prefix length have been added.
+ - In mobile, wearable, and TV profiles, a new connection and wifi-manager API for getting multiple ipv6 addresses has been added.
+ - In mobile, wearable, and TV profiles, a new wifi-manager API for getting multiple ipv6 addresses has been added.
+ - In mobile, wearable, and TV profiles, a new wifi-manager API for connecting a hidden AP has been added.
+ - In mobile, wearable, and TV profiles, a new wifi-manager API for getting the disconnect reason has been added.
+ - In mobile, wearable, and TV profiles, wifi-manager APIs for connecting/canceling WPS-PIN/PBC without ssid have been added.
+ - In mobile, wearable, and TV profiles, wifi-manager APIs for connecting/discovering TDLS without ssid have been added.
+ - In mobile, wearable, and TV profiles, a new wifi-manager API for switching TDLS’s channel has been added.
+ - In mobile, wearable, and TV profiles, wifi-manager APIs for getting the DHCP address have been added.
+ - In mobile, wearable, and TV profiles, wifi-manager APIs for getting the scan status have been added.
+ - In mobile and wearable profiles, the ASP (Application Service Platform) feature support has been added.
+ - In mobile, wearable, and TV profiles, the IPv6 tethering feature support has been added.
+ - In mobile, wearable, and TV profiles, tethering APIs for getting/setting IPv6 tethering have been added.
+ - In the mobile profile, the default VPN (IPsec) feature support has been added.
+ - In mobile and wearable profiles, the wifi-direct tethering feature support has been added.
+ - In mobile and wearable profiles, the STC (Smart Traffic Control) feature support has been added.
+ - Major open source upgrades and changes:
+ - Curl has been upgraded from 7.40 to 7.53 for stability.
+- Telephony
+ - In mobile, wearable, and TV profiles, the telephony manager plugin has been added.
+ - In mobile, wearable, and TV profiles, the feature-based handling support has been added.
+ - In mobile, wearable, and TV profiles, SQLite3 insertion operations for the packet service plugin have been improved.
+ - In mobile and wearable profiles, telephony popup plugins have been added.
+ - In mobile and wearable profiles, a new API for network signal strength with dBm getter has been added.
+ - In mobile and wearable profiles, a new API for modem power status event register has been added.
+ - In mobile and wearable profiles, LTE attach apn logic support has been added.
+ - In the wearable profile, the call manager library support has been added.
+ - In the wearable profile, the standalone mode telephony framework support has been added.
+- Connectivity
+ - New features and APIs have been added:
+ - In mobile and wearable profiles, support for OMAPI 3.2 has been added.
+ - Major open source upgrade and change has been made.
+- Bluetooth
+ - New features and APIs have been added:
+ - In mobile, wearable, and TV profiles, IPSP (Internet Protocol Support Profile) APIs have been added.
+ - In mobile, wearable, and TV profiles, GATT MTU Exchange APIs have been added.
+ - In mobile, wearable, and TV profiles, LE Scan filtering APIs have been added.
+ - Major open source upgrades and changes:
+ - Bluez has been upgraded from 5.37 to 5.43.
+- IoTCon
+ - Dependency with system-settings has been removed.
+
+**Fixes**
+
+- Memory leak on the MTP daemon has been fixed.
+- Memory leak on the connman and net-config has been fixed.
+- Memory leak on the libnet-client and wifi-manager has been fixed.
+- Memory leak on the IotCon has been fixed.
+- Sample code bugs in the IoTCon document have been fixed.
+
+
+### Security
+
+**New and Changed Features**
+
+- Device Encryption / Secure Storage
+ - Device encryption:
+ - Internal storage encryption has been added.
+ - External storage encryption has been added.
+ - Secure erase has been added.
+- Trusted Execution Environment
+ - A new C# TEE Client API has been added:
+ - This API only works on devices supporting TEE.
+- App-defined Privilege
+ - The ways to define and declare an app-defined privilege have been added.
+- Privilege List
+ - In mobile and wearable profiles, the following privilege has been added:
+ - Native
+ - zigbee / zigbee.admin
+ - In mobile and wearable profiles, the following privilege has been removed:
+ - Web
+ - nfc.admin
+ - In mobile, wearable, and TV profiles, the following privileges have been added:
+ - C#
+ - tee.client
+ - Web
+ - apphistory.read
+
+### Service Framework
+
+**New and Changed Features**
+
+- Sensor
+ - Sensor URIs for existing sensors have been defined.
+ - A new API for getting sensor handles with their URIs has been added.
+ - A new API that allows applications to define their own sensors and publish data through the defined sensors has been added.
+- PIMS
+ - Calendar
+ - In the TV profile, Calendar Service has been added.
+ - New APIs for event aggregation have been added.
+- Convergence
+ - FIDO
+ - The FIDO Platform ASM module has been added, supporting pluggable FIDO authenticators. Both Bound and Roaming type (Connectivity type: BT) are supported.
+ - A FIDO platform authenticator has been added based on auth-fw.
+ Note: The authenticator is not FIDO-certified and does not work for commercial FIDO servers.
+ - Push
+ - A service app checking routine has been added.
+ - Install/uninstall for multiuser has been added.
+ - Delivery of push messages when the application is in freeze state has been added.
+ - Account Manager
+ - Notification for deletions by package name has been added (in mobile and wearable profiles).
+ - An "ADD button" string has been added in My-account setting application (in the wearable profile).
+ - An accounts view for showing registered account providers has been added (in the wearable profile).
+ - Sync Manager
+ - Application enable/disable has been added (in mobile and wearable profiles).
+
+**Fixes**
+
+- Convergence
+ - Push
+ - The bug about push_request_unread_notification has been fixed.
+ - The bug causing a crash when there is no record in the reg table has been fixed.
+ - Wrong notification posting has been fixed.
+ - Lazy mount dependency has been removed.
+ - Account Manager
+ - The conf name in the service file for CapabilityBoundingSet has been fixed (in mobile and wearable profiles).
+ - The Global DB path for the owner user has been fixed (in mobile and wearable profiles).
+ - Timing for drawing the main UI has been fixed (in the wearable profile).
+ - Sync Manager
+ - The application control for sync-service has been changed to aul (in mobile and wearable profiles).
+ - The runtime profile build dependency has been removed (in mobile and wearable profiles).
+
+### Web Framework
+
+**New and Changed Features**
+
+- HTML5/W3C APIs
+ - Open source chromium M56 version has been applied for Tizen 4.0 web browser and web application runtime engine. Below HTML5/W3C standard feature/APIs have been applied.
+ - Shadow DOM v1
+ - A method has been added for combining multiple DOM trees into a single hierarchy and determining how these trees interact with each other within a document, thus enabling better composition of the DOM.
+ - Pointer Events
+ - A unified pointer input API has been added, subsuming MouseEvent and TouchEvents.
+ - WebGL 2
+ - OpenGL® ES 3.0-level rendering capabilities are provided through the