diff --git a/README.md b/README.md
index 6cf5c3f..c0cc2a7 100644
--- a/README.md
+++ b/README.md
@@ -1,9 +1,9 @@
-# pysheds [](https://travis-ci.org/mdbartos/pysheds) [](https://coveralls.io/github/mdbartos/pysheds?branch=master) [](https://www.python.org/downloads/release/python-370/)
+# pysheds [](https://travis-ci.org/mdbartos/pysheds) [](https://coveralls.io/github/mdbartos/pysheds?branch=master) [](https://www.python.org/downloads/)
🌎 Simple and fast watershed delineation in python.
## Documentation
-Read the docs [here](https://mdbartos.github.io/pysheds).
+Read the docs [here 📖](https://mdbartos.github.io/pysheds).
## Media
@@ -17,45 +17,136 @@ Read the docs [here](https://mdbartos.github.io/pysheds).
## Example usage
-See [examples/quickstart](https://github.com/mdbartos/pysheds/blob/master/examples/quickstart.ipynb) for more details.
+Example data used in this tutorial are linked below:
-Data available via the [USGS HydroSHEDS](https://hydrosheds.cr.usgs.gov/datadownload.php) project.
+ - Elevation: [elevation.tiff](https://pysheds.s3.us-east-2.amazonaws.com/data/elevation.tiff)
+ - Terrain: [impervious_area.zip](https://pysheds.s3.us-east-2.amazonaws.com/data/impervious_area.zip)
+ - Soil Polygons: [soils.zip](https://pysheds.s3.us-east-2.amazonaws.com/data/soils.zip)
+
+Additional DEM datasets are available via the [USGS HydroSHEDS](https://www.hydrosheds.org/) project.
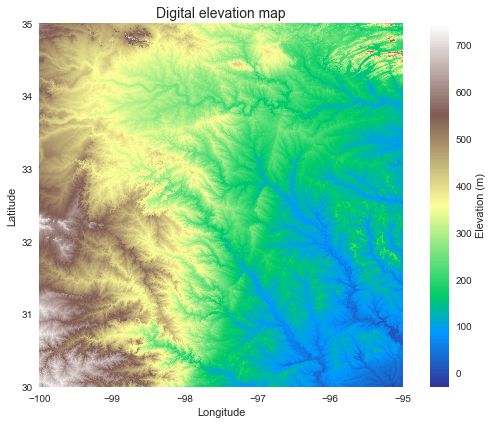
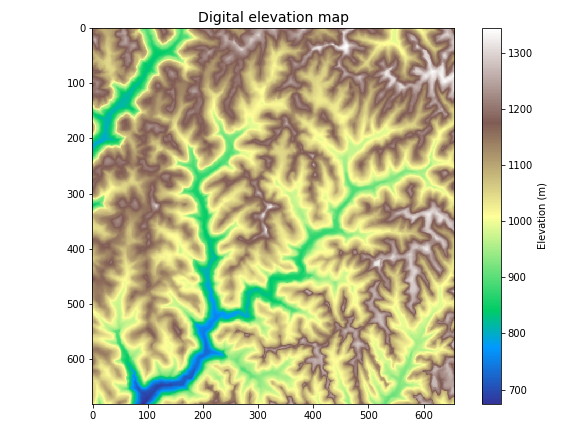
### Read DEM data
```python
-# Read elevation and flow direction rasters
+# Read elevation raster
# ----------------------------
from pysheds.grid import Grid
-grid = Grid.from_raster('n30w100_con', data_name='dem')
-grid.read_raster('n30w100_dir', data_name='dir')
-grid.view('dem')
+grid = Grid.from_raster('elevation.tiff')
+dem = grid.read_raster('elevation.tiff')
```
-
+
+Plotting code...
+
-### Elevation to flow direction
+```python
+import numpy as np
+import matplotlib.pyplot as plt
+from matplotlib import colors
+import seaborn as sns
+
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.imshow(dem, extent=grid.extent, cmap='terrain', zorder=1)
+plt.colorbar(label='Elevation (m)')
+plt.grid(zorder=0)
+plt.title('Digital elevation map', size=14)
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.tight_layout()
+```
+
+
+
+
+
+
+### Condition the elevation data
```python
-# Determine D8 flow directions from DEM
+# Condition DEM
# ----------------------
+# Fill pits in DEM
+pit_filled_dem = grid.fill_pits(dem)
+
# Fill depressions in DEM
-grid.fill_depressions('dem', out_name='flooded_dem')
+flooded_dem = grid.fill_depressions(pit_filled_dem)
# Resolve flats in DEM
-grid.resolve_flats('flooded_dem', out_name='inflated_dem')
-
+inflated_dem = grid.resolve_flats(flooded_dem)
+```
+
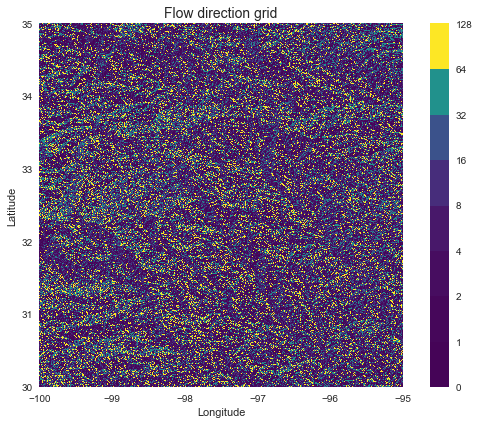
+### Elevation to flow direction
+
+```python
+# Determine D8 flow directions from DEM
+# ----------------------
# Specify directional mapping
dirmap = (64, 128, 1, 2, 4, 8, 16, 32)
# Compute flow directions
# -------------------------------------
-grid.flowdir(data='inflated_dem', out_name='dir', dirmap=dirmap)
-grid.view('dir')
+fdir = grid.flowdir(inflated_dem, dirmap=dirmap)
+```
+
+
+Plotting code...
+
+
+```python
+fig = plt.figure(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.imshow(fdir, extent=grid.extent, cmap='viridis', zorder=2)
+boundaries = ([0] + sorted(list(dirmap)))
+plt.colorbar(boundaries= boundaries,
+ values=sorted(dirmap))
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.title('Flow direction grid', size=14)
+plt.grid(zorder=-1)
+plt.tight_layout()
+```
+
+
+
+
+
+
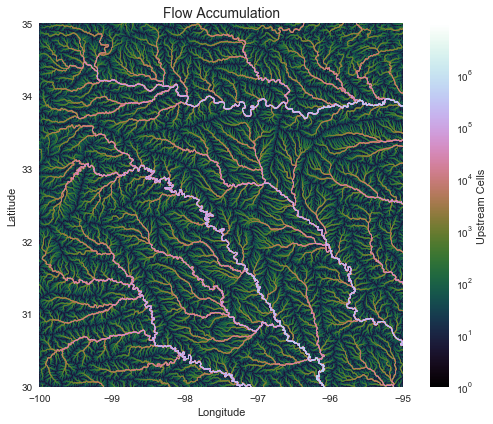
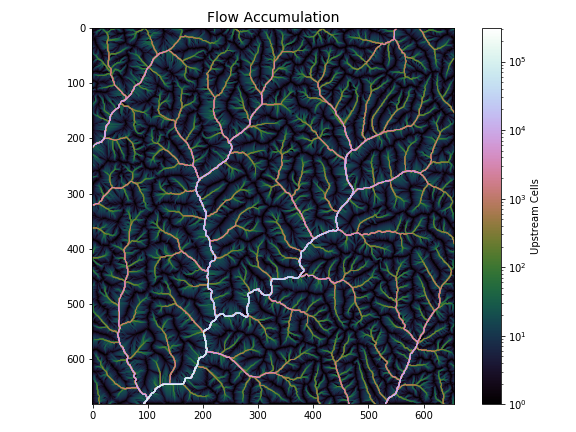
+### Compute accumulation from flow direction
+
+```python
+# Calculate flow accumulation
+# --------------------------
+acc = grid.accumulation(fdir, dirmap=dirmap)
```
-
+
+Plotting code...
+
+
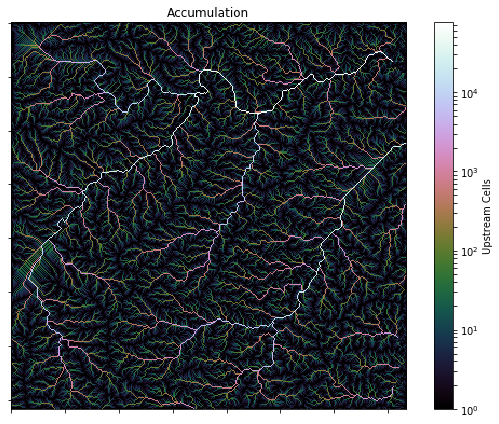
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.grid('on', zorder=0)
+im = ax.imshow(acc, extent=grid.extent, zorder=2,
+ cmap='cubehelix',
+ norm=colors.LogNorm(1, acc.max()),
+ interpolation='bilinear')
+plt.colorbar(im, ax=ax, label='Upstream Cells')
+plt.title('Flow Accumulation', size=14)
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.tight_layout()
+```
+
+
+
+
+
+
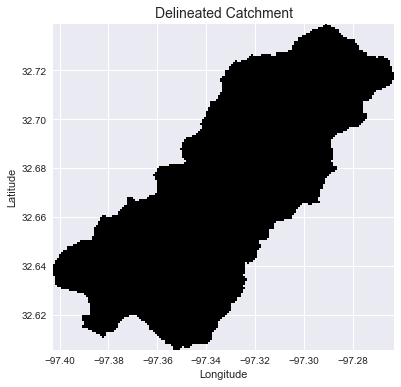
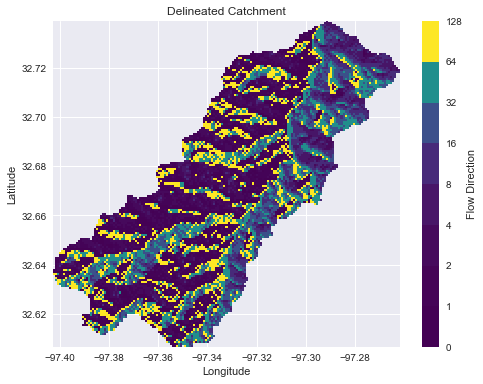
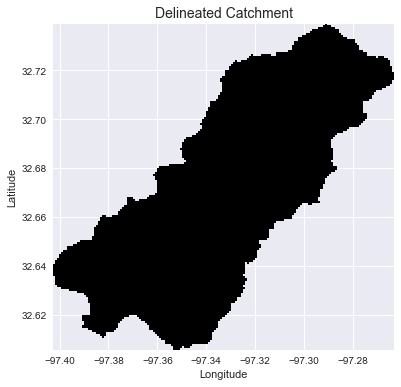
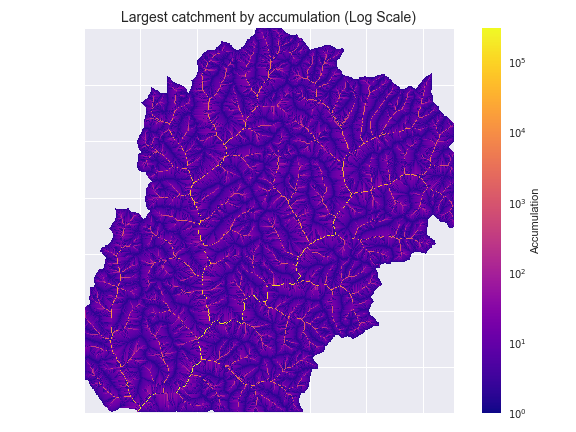
### Delineate catchment from flow direction
@@ -63,66 +154,139 @@ grid.view('dir')
# Delineate a catchment
# ---------------------
# Specify pour point
-x, y = -97.294167, 32.73750
+x, y = -97.294, 32.737
+
+# Snap pour point to high accumulation cell
+x_snap, y_snap = grid.snap_to_mask(acc > 1000, (x, y))
# Delineate the catchment
-grid.catchment(data='dir', x=x, y=y, dirmap=dirmap, out_name='catch',
- recursionlimit=15000, xytype='label')
+catch = grid.catchment(x=x_snap, y=y_snap, fdir=fdir, dirmap=dirmap,
+ xytype='coordinate')
# Crop and plot the catchment
# ---------------------------
# Clip the bounding box to the catchment
-grid.clip_to('catch')
-grid.view('catch')
+grid.clip_to(catch)
+clipped_catch = grid.view(catch)
```
-
+
+Plotting code...
+
-### Compute accumulation from flow direction
+```python
+# Plot the catchment
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.grid('on', zorder=0)
+im = ax.imshow(np.where(clipped_catch, clipped_catch, np.nan), extent=grid.extent,
+ zorder=1, cmap='Greys_r')
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.title('Delineated Catchment', size=14)
+```
+
+
+
+
+
+
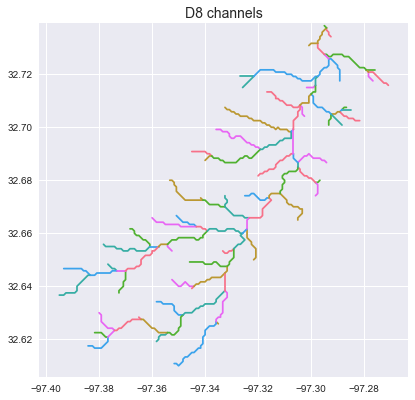
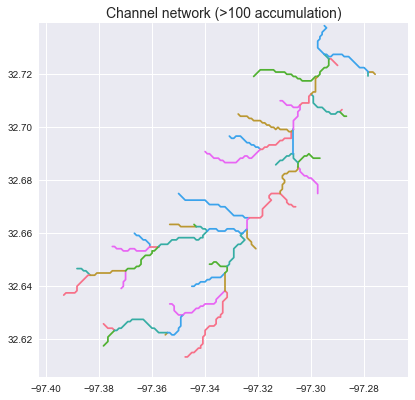
+### Extract the river network
```python
-# Calculate flow accumulation
-# --------------------------
-grid.accumulation(data='catch', dirmap=dirmap, out_name='acc')
-grid.view('acc')
+# Extract river network
+# ---------------------
+branches = grid.extract_river_network(fdir, acc > 50, dirmap=dirmap)
```
-
+
+Plotting code...
+
+
+```python
+sns.set_palette('husl')
+fig, ax = plt.subplots(figsize=(8.5,6.5))
+
+plt.xlim(grid.bbox[0], grid.bbox[2])
+plt.ylim(grid.bbox[1], grid.bbox[3])
+ax.set_aspect('equal')
+
+for branch in branches['features']:
+ line = np.asarray(branch['geometry']['coordinates'])
+ plt.plot(line[:, 0], line[:, 1])
+
+_ = plt.title('D8 channels', size=14)
+```
+
+
+
+
+
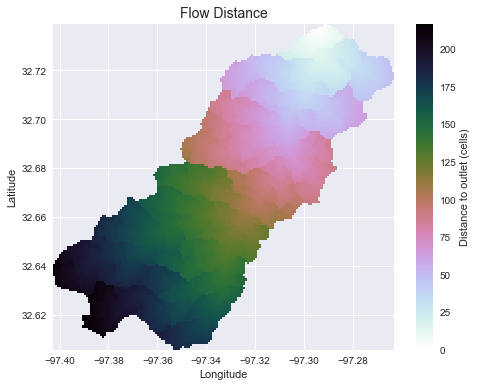
### Compute flow distance from flow direction
```python
# Calculate distance to outlet from each cell
# -------------------------------------------
-grid.flow_distance(data='catch', x=x, y=y, dirmap=dirmap,
- out_name='dist', xytype='label')
-grid.view('dist')
+dist = grid.distance_to_outlet(x=x_snap, y=y_snap, fdir=fdir, dirmap=dirmap,
+ xytype='coordinate')
```
-
-
-### Extract the river network
+
+Plotting code...
+
```python
-# Extract river network
-# ---------------------
-branches = grid.extract_river_network(fdir='catch', acc='acc',
- threshold=50, dirmap=dirmap)
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.grid('on', zorder=0)
+im = ax.imshow(dist, extent=grid.extent, zorder=2,
+ cmap='cubehelix_r')
+plt.colorbar(im, ax=ax, label='Distance to outlet (cells)')
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.title('Flow Distance', size=14)
```
-
+
+
+
+
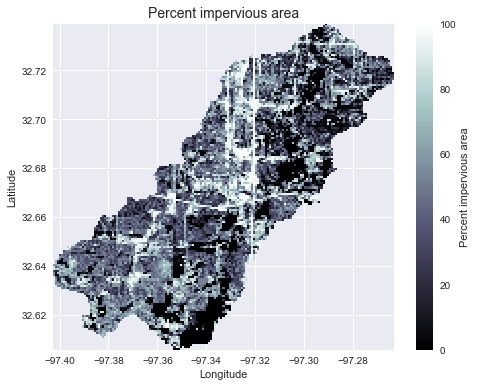
### Add land cover data
```python
# Combine with land cover data
# ---------------------
-grid.read_raster('nlcd_2011_impervious_2011_edition_2014_10_10.img',
- data_name='terrain', window=grid.bbox, window_crs=grid.crs)
-grid.view('terrain')
+terrain = grid.read_raster('impervious_area.tiff', window=grid.bbox,
+ window_crs=grid.crs, nodata=0)
+# Reproject data to grid's coordinate reference system
+projected_terrain = terrain.to_crs(grid.crs)
+# View data in catchment's spatial extent
+catchment_terrain = grid.view(projected_terrain, nodata=np.nan)
```
-
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.grid('on', zorder=0)
+im = ax.imshow(catchment_terrain, extent=grid.extent, zorder=2,
+ cmap='bone')
+plt.colorbar(im, ax=ax, label='Percent impervious area')
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.title('Percent impervious area', size=14)
+```
+
+
+
+
+
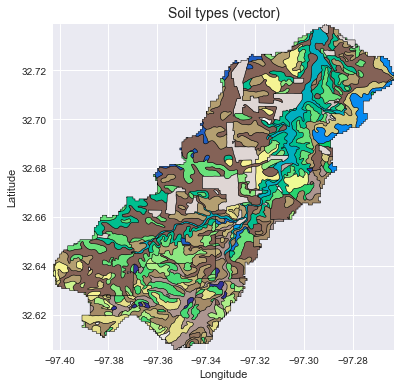
### Add vector data
@@ -130,82 +294,110 @@ grid.view('terrain')
# Convert catchment raster to vector and combine with soils shapefile
# ---------------------
# Read soils shapefile
+import pandas as pd
import geopandas as gpd
from shapely import geometry, ops
-soils = gpd.read_file('nrcs-soils-tarrant_439.shp')
+soils = gpd.read_file('soils.shp')
+soil_id = 'MUKEY'
# Convert catchment raster to vector geometry and find intersection
shapes = grid.polygonize()
catchment_polygon = ops.unary_union([geometry.shape(shape)
for shape, value in shapes])
soils = soils[soils.intersects(catchment_polygon)]
-catchment_soils = soils.intersection(catchment_polygon)
+catchment_soils = gpd.GeoDataFrame(soils[soil_id],
+ geometry=soils.intersection(catchment_polygon))
+# Convert soil types to simple integer values
+soil_types = np.unique(catchment_soils[soil_id])
+soil_types = pd.Series(np.arange(soil_types.size), index=soil_types)
+catchment_soils[soil_id] = catchment_soils[soil_id].map(soil_types)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8, 6))
+catchment_soils.plot(ax=ax, column=soil_id, categorical=True, cmap='terrain',
+ linewidth=0.5, edgecolor='k', alpha=1, aspect='equal')
+ax.set_xlim(grid.bbox[0], grid.bbox[2])
+ax.set_ylim(grid.bbox[1], grid.bbox[3])
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+ax.set_title('Soil types (vector)', size=14)
```
-
+
+
+
+
### Convert from vector to raster
```python
-# Convert soils polygons to raster
-# ---------------------
-soil_polygons = zip(catchment_soils.geometry.values,
- catchment_soils['soil_type'].values)
+soil_polygons = zip(catchment_soils.geometry.values, catchment_soils[soil_id].values)
soil_raster = grid.rasterize(soil_polygons, fill=np.nan)
```
-
-
-### Estimate inundation using the Rapid Flood Spilling Method
+
+Plotting code...
+
```python
-# Estimate inundation extent
-# ---------------------
-from pysheds.rfsm import RFSM
-grid = Grid.from_raster('roi.tif', data_name='dem')
-grid.clip_to('dem')
-dem = grid.view('dem')
-cell_area = np.abs(grid.affine.a * grid.affine.e)
-# Create RFSM instance
-rfsm = RFSM(dem)
-# Apply uniform rainfall to DEM
-input_vol = 0.1 * cell_area * np.ones(dem.shape)
-waterlevel = rfsm.compute_waterlevel(input_vol)
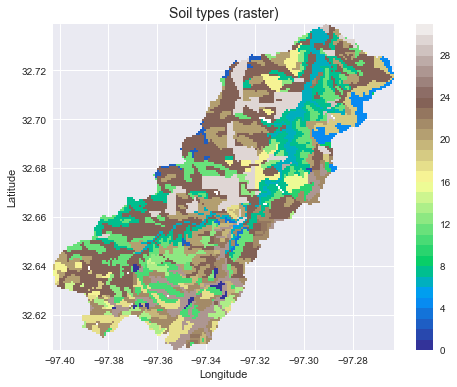
+fig, ax = plt.subplots(figsize=(8, 6))
+plt.imshow(soil_raster, cmap='terrain', extent=grid.extent, zorder=1)
+boundaries = np.unique(soil_raster[~np.isnan(soil_raster)]).astype(int)
+plt.colorbar(boundaries=boundaries,
+ values=boundaries)
+ax.set_xlim(grid.bbox[0], grid.bbox[2])
+ax.set_ylim(grid.bbox[1], grid.bbox[3])
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+ax.set_title('Soil types (raster)', size=14)
```
- +
+
+
+
+
## Features
- Hydrologic Functions:
- - `flowdir`: DEM to flow direction.
- - `catchment`: Delineate catchment from flow direction.
- - `accumulation`: Flow direction to flow accumulation.
- - `flow_distance`: Compute flow distance to outlet.
- - `extract_river_network`: Extract river network at a given accumulation threshold.
- - `cell_area`: Compute (projected) area of cells.
- - `cell_distances`: Compute (projected) channel length within cells.
- - `cell_dh`: Compute the elevation change between cells.
- - `cell_slopes`: Compute the slopes of cells.
- - `fill_pits`: Fill simple pits in a DEM (single cells lower than their surrounding neighbors).
- - `fill_depressions`: Fill depressions in a DEM (regions of cells lower than their surrounding neighbors).
- - `resolve_flats`: Resolve drainable flats in a DEM using the modified method of Garbrecht and Martz (1997).
- - `compute_hand` : Compute the height above nearest drainage (HAND) as described in Nobre et al. (2011).
-- Utilities:
- - `view`: Returns a view of a dataset at a given bounding box and resolution.
- - `clip_to`: Clip the current view to the extent of nonzero values in a given dataset.
- - `set_bbox`: Set the current view to a rectangular bounding box.
- - `snap_to_mask`: Snap a set of coordinates to the nearest masked cells (e.g. cells with high accumulation).
- - `resize`: Resize a dataset to a new resolution.
- - `rasterize`: Convert a vector dataset to a raster dataset.
- - `polygonize`: Convert a raster dataset to a vector dataset.
- - `detect_pits`: Return boolean array indicating locations of simple pits in a DEM.
- - `detect_flats`: Return boolean array indicating locations of flats in a DEM.
- - `detect_depressions`: Return boolean array indicating locations of depressions in a DEM.
- - `check_cycles`: Check for cycles in a flow direction grid.
- - `set_nodata`: Set nodata value for a dataset.
-- I/O:
+ - `flowdir` : Generate a flow direction grid from a given digital elevation dataset.
+ - `catchment` : Delineate the watershed for a given pour point (x, y).
+ - `accumulation` : Compute the number of cells upstream of each cell; if weights are
+ given, compute the sum of weighted cells upstream of each cell.
+ - `distance_to_outlet` : Compute the (weighted) distance from each cell to a given
+ pour point, moving downstream.
+ - `distance_to_ridge` : Compute the (weighted) distance from each cell to its originating
+ drainage divide, moving upstream.
+ - `compute_hand` : Compute the height above nearest drainage (HAND).
+ - `stream_order` : Compute the (strahler) stream order.
+ - `extract_river_network` : Extract river segments from a catchment and return a geojson
+ object.
+ - `cell_dh` : Compute the drop in elevation from each cell to its downstream neighbor.
+ - `cell_distances` : Compute the distance from each cell to its downstream neighbor.
+ - `cell_slopes` : Compute the slope between each cell and its downstream neighbor.
+ - `fill_pits` : Fill single-celled pits in a digital elevation dataset.
+ - `fill_depressions` : Fill multi-celled depressions in a digital elevation dataset.
+ - `resolve_flats` : Remove flats from a digital elevation dataset.
+ - `detect_pits` : Detect single-celled pits in a digital elevation dataset.
+ - `detect_depressions` : Detect multi-celled depressions in a digital elevation dataset.
+ - `detect_flats` : Detect flats in a digital elevation dataset.
+- Viewing Functions:
+ - `view` : Returns a "view" of a dataset defined by the grid's viewfinder.
+ - `clip_to` : Clip the viewfinder to the smallest area containing all non-
+ null gridcells for a provided dataset.
+ - `nearest_cell` : Returns the index (column, row) of the cell closest
+ to a given geographical coordinate (x, y).
+ - `snap_to_mask` : Snaps a set of points to the nearest nonzero cell in a boolean mask;
+ useful for finding pour points from an accumulation raster.
+- I/O Functions:
- `read_ascii`: Reads ascii gridded data.
- `read_raster`: Reads raster gridded data.
+ - `from_ascii` : Instantiates a grid from an ascii file.
+ - `from_raster` : Instantiates a grid from a raster file or Raster object.
- `to_ascii`: Write grids to delimited ascii files.
- `to_raster`: Write grids to raster files (e.g. geotiff).
@@ -255,10 +447,37 @@ $ pip install .
```
# Performance
-Performance benchmarks on a 2015 MacBook Pro:
-
-- Flow Direction to Flow Accumulation: 36 million grid cells in 15 seconds.
-- Flow Direction to Catchment: 9.8 million grid cells in 4.55 seconds.
+Performance benchmarks on a 2015 MacBook Pro (M: million, K: thousand):
+
+| Function | Routing | Number of cells | Run time |
+| ----------------------- | ------- | ------------------------ | -------- |
+| `flowdir` | D8 | 36M | 1.09 [s] |
+| `flowdir` | DINF | 36M | 6.64 [s] |
+| `accumulation` | D8 | 36M | 3.65 [s] |
+| `accumulation` | DINF | 36M | 16.2 [s] |
+| `catchment` | D8 | 9.76M | 3.43 [s] |
+| `catchment` | DINF | 9.76M | 5.41 [s] |
+| `distance_to_outlet` | D8 | 9.76M | 4.74 [s] |
+| `distance_to_outlet` | DINF | 9.76M | 1 [m] 13 [s] |
+| `distance_to_ridge` | D8 | 36M | 6.83 [s] |
+| `hand` | D8 | 36M total, 730K channel | 12.9 [s] |
+| `hand` | DINF | 36M total, 770K channel | 18.7 [s] |
+| `stream_order` | D8 | 36M total, 1M channel | 3.99 [s] |
+| `extract_river_network` | D8 | 36M total, 345K channel | 4.07 [s] |
+| `detect_pits` | N/A | 36M | 1.80 [s] |
+| `detect_flats` | N/A | 36M | 1.84 [s] |
+| `fill_pits` | N/A | 36M | 2.52 [s] |
+| `fill_depressions` | N/A | 36M | 27.1 [s] |
+| `resolve_flats` | N/A | 36M | 9.56 [s] |
+| `cell_dh` | D8 | 36M | 2.34 [s] |
+| `cell_dh` | DINF | 36M | 4.92 [s] |
+| `cell_distances` | D8 | 36M | 1.11 [s] |
+| `cell_distances` | DINF | 36M | 2.16 [s] |
+| `cell_slopes` | D8 | 36M | 4.01 [s] |
+| `cell_slopes` | DINF | 36M | 10.2 [s] |
+
+Speed tests were run on a conditioned DEM from the HYDROSHEDS DEM repository
+(linked above as `elevation.tiff`).
# Citing
diff --git a/docs/accumulation.md b/docs/accumulation.md
index 1f1dc58..268877e 100644
--- a/docs/accumulation.md
+++ b/docs/accumulation.md
@@ -5,14 +5,15 @@
The `grid.accumulation` method operates on a flow direction grid. This flow direction grid can be computed from a DEM, as shown in [flow directions](https://mdbartos.github.io/pysheds/flow-directions.html).
```python
->>> from pysheds.grid import Grid
+from pysheds.grid import Grid
# Instantiate grid from raster
->>> grid = Grid.from_raster('../data/dem.tif', data_name='dem')
+grid = Grid.from_raster('./data/dem.tif')
+dem = grid.read_raster('./data/dem.tif')
# Resolve flats and compute flow directions
->>> grid.resolve_flats(data='dem', out_name='inflated_dem')
->>> grid.flowdir('inflated_dem', out_name='dir')
+inflated_dem = grid.resolve_flats(dem)
+fdir = grid.flowdir(inflated_dem)
```
## Computing accumulation
@@ -21,29 +22,34 @@ Accumulation is computed using the `grid.accumulation` method.
```python
# Compute accumulation
->>> grid.accumulation(data='dir', out_name='acc')
-
-# Plot accumulation
->>> acc = grid.view('acc')
->>> plt.imshow(acc)
+acc = grid.accumulation(fdir)
```
-
-
-## Computing weighted accumulation
-
-Weights can be used to adjust the relative contribution of each cell.
+
+Plotting code...
+
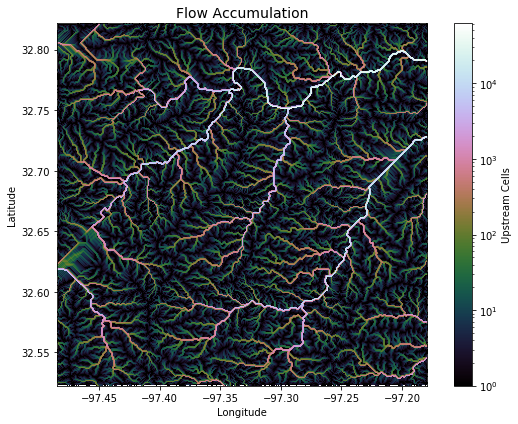
```python
-import pyproj
+import matplotlib.pyplot as plt
+import matplotlib.colors as colors
+%matplotlib inline
+
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.grid('on', zorder=0)
+im = ax.imshow(acc, extent=grid.extent, zorder=2,
+ cmap='cubehelix',
+ norm=colors.LogNorm(1, acc.max()),
+ interpolation='bilinear')
+plt.colorbar(im, ax=ax, label='Upstream Cells')
+plt.title('Flow Accumulation', size=14)
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.tight_layout()
+```
-# Compute areas of each cell in new projection
-new_crs = pyproj.Proj('+init=epsg:3083')
-areas = grid.cell_area(as_crs=new_crs, inplace=False)
+
+
-# Weight each cell by its relative area
-weights = (areas / areas.max()).ravel()
-# Compute accumulation with new weights
-grid.accumulation(data='dir', weights=weights, out_name='acc')
-```
+
diff --git a/docs/catchment.md b/docs/catchment.md
index 4b5a27e..0390e3b 100644
--- a/docs/catchment.md
+++ b/docs/catchment.md
@@ -5,53 +5,139 @@
The `grid.catchment` method operates on a flow direction grid. This flow direction grid can be computed from a DEM, as shown in [flow directions](https://mdbartos.github.io/pysheds/flow-directions.html).
```python
->>> from pysheds.grid import Grid
+from pysheds.grid import Grid
# Instantiate grid from raster
->>> grid = Grid.from_raster('../data/dem.tif', data_name='dem')
+grid = Grid.from_raster('./data/dem.tif')
+dem = grid.read_raster('./data/dem.tif')
# Resolve flats and compute flow directions
->>> grid.resolve_flats(data='dem', out_name='inflated_dem')
->>> grid.flowdir('inflated_dem', out_name='dir')
+inflated_dem = grid.resolve_flats(dem)
+fdir = grid.flowdir(inflated_dem)
```
## Delineating the catchment
-To delineate a catchment, first specify a pour point (the outlet of the catchment). If the x and y components of the pour point are spatial coordinates in the grid's spatial reference system, specify `xytype='label'`.
+To delineate a catchment, first specify a pour point (the outlet of the catchment). If the x and y components of the pour point are spatial coordinates in the grid's spatial reference system, specify `xytype='coordinate'`.
```python
# Specify pour point
->>> x, y = -97.294167, 32.73750
+x, y = -97.294167, 32.73750
# Delineate the catchment
->>> grid.catchment(data='dir', x=x, y=y, out_name='catch',
- recursionlimit=15000, xytype='label')
+catch = grid.catchment(x=x, y=y, fdir=fdir, xytype='coordinate')
# Plot the result
->>> grid.clip_to('catch')
->>> plt.imshow(grid.view('catch'))
+grid.clip_to(catch)
+catch_view = grid.view(catch)
```
-
+
+Plotting code...
+
+
+```python
+# Plot the catchment
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.grid('on', zorder=0)
+im = ax.imshow(np.where(catch_view, catch_view, np.nan), extent=grid.extent,
+ zorder=1, cmap='Greys_r')
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.title('Delineated Catchment', size=14)
+```
+
+
+
+
+
+
If the x and y components of the pour point correspond to the row and column indices of the flow direction array, specify `xytype='index'`:
```python
# Reset the view
->>> grid.clip_to('dir')
+grid.viewfinder = fdir.viewfinder
# Find the row and column index corresponding to the pour point
->>> col, row = grid.nearest_cell(x, y)
->>> col, row
-(229, 101)
+col, row = grid.nearest_cell(x, y)
+
+# Delineate the catchment
+catch = grid.catchment(x=col, y=row, fdir=fdir, xytype='index')
+
+# Plot the result
+grid.clip_to(catch)
+catch_view = grid.view(catch)
+```
+
+
+Plotting code...
+
+
+```python
+# Plot the catchment
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.grid('on', zorder=0)
+im = ax.imshow(np.where(catch_view, catch_view, np.nan), extent=grid.extent,
+ zorder=1, cmap='Greys_r')
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.title('Delineated Catchment', size=14)
+```
+
+
+
+
+
+
+
+## Snapping pour point to high accumulation cells
+
+Sometimes the pour point isn't known exactly. In this case, it can be helpful to first compute the accumulation and then snap a trial pour point to the nearest high accumulation cell.
+
+```python
+# Reset view
+grid.viewfinder = fdir.viewfinder
+
+# Compute accumulation
+acc = grid.accumulation(fdir)
+
+# Snap pour point to high accumulation cell
+x_snap, y_snap = grid.snap_to_mask(acc > 1000, (x, y))
+
# Delineate the catchment
->>> grid.catchment(data=grid.dir, x=col, y=row, out_name='catch',
- recursionlimit=15000, xytype='index')
+catch = grid.catchment(x=x_snap, y=y_snap, fdir=fdir, xytype='coordinate')
# Plot the result
->>> grid.clip_to('catch')
->>> plt.imshow(grid.view('catch'))
+grid.clip_to(catch)
+catch_view = grid.view(catch)
+```
+
+
+Plotting code...
+
+
+```python
+# Plot the catchment
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.grid('on', zorder=0)
+im = ax.imshow(np.where(catch_view, catch_view, np.nan), extent=grid.extent,
+ zorder=1, cmap='Greys_r')
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.title('Delineated Catchment', size=14)
```
-
+
+
+
+
+
+
diff --git a/docs/dem-conditioning.md b/docs/dem-conditioning.md
index 38a4b52..00cf279 100644
--- a/docs/dem-conditioning.md
+++ b/docs/dem-conditioning.md
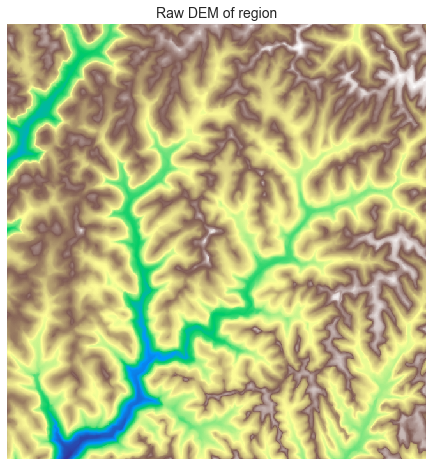
@@ -10,29 +10,102 @@ Raw DEMs often contain depressions that must be removed before further processin
```python
# Import modules
->>> from pysheds.grid import Grid
+import matplotlib.pyplot as plt
+import matplotlib.colors as colors
+from pysheds.grid import Grid
+
+%matplotlib inline
# Read raw DEM
->>> grid = Grid.from_raster('../data/roi_10m', data_name='dem')
+grid = Grid.from_raster('./data/roi_10m')
+dem = grid.read_raster('./data/roi_10m')
+```
+
+
+Plotting code...
+
+```python
# Plot the raw DEM
->>> plt.imshow(grid.view('dem'))
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.imshow(grid.view(dem), cmap='terrain', zorder=1)
+plt.colorbar(label='Elevation (m)')
+plt.title('Digital elevation map', size=14)
+plt.tight_layout()
+```
+
+
+
+
+
+
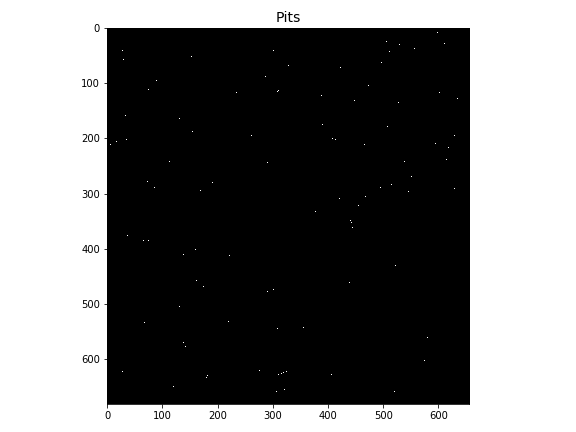
+### Detecting pits
+Pits can be detected using the `grid.detect_depressions` method:
+
+```python
+# Detect pits
+pits = grid.detect_pits(dem)
```
-
+
+Plotting code...
+
+
+```python
+# Plot pits
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.imshow(pits, cmap='Greys_r', zorder=1)
+plt.title('Pits', size=14)
+plt.tight_layout()
+```
+
+
+
+
+
+
+### Filling pits
+
+Pits can be filled using the `grid.fill_depressions` method:
+
+```python
+# Fill pits
+pit_filled_dem = grid.fill_pits(dem)
+pits = grid.detect_pits(pit_filled_dem)
+assert not pits.any()
+```
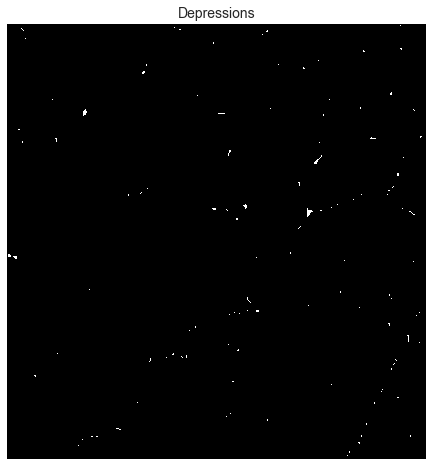
### Detecting depressions
Depressions can be detected using the `grid.detect_depressions` method:
```python
# Detect depressions
-depressions = grid.detect_depressions('dem')
+depressions = grid.detect_depressions(pit_filled_dem)
+```
+
+
+Plotting code...
+
+```python
# Plot depressions
-plt.imshow(depressions)
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.imshow(depressions, cmap='Greys_r', zorder=1)
+plt.title('Depressions', size=14)
+plt.tight_layout()
```
-
+
+
+
+
+
### Filling depressions
@@ -40,17 +113,14 @@ Depressions can be filled using the `grid.fill_depressions` method:
```python
# Fill depressions
->>> grid.fill_depressions(data='dem', out_name='flooded_dem')
-
-# Test result
->>> depressions = grid.detect_depressions('dem')
->>> depressions.any()
-False
+flooded_dem = grid.fill_depressions(pit_filled_dem)
+depressions = grid.detect_depressions(flooded_dem)
+assert not depressions.any()
```
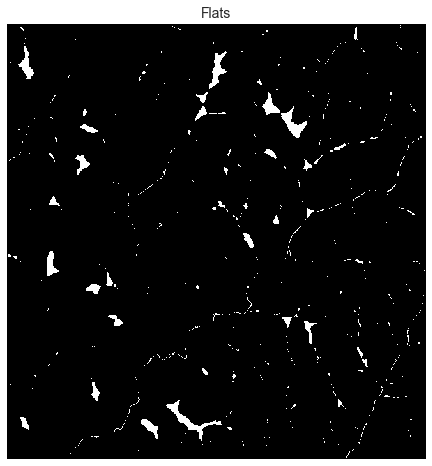
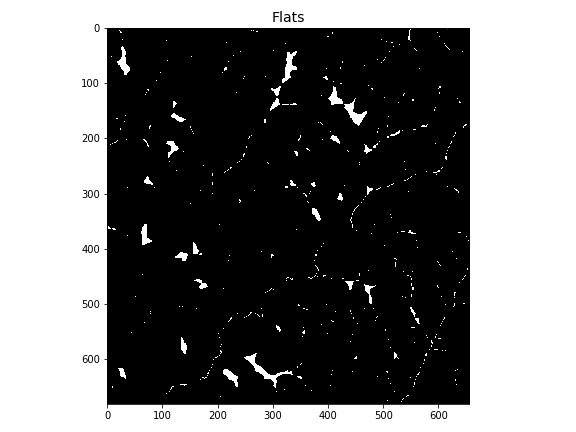
## Flats
-Flats consist of cells at which every surrounding cell is at the same elevation or higher.
+Flats consist of cells at which every surrounding cell is at the same elevation or higher. Note that we have created flats by filling in our pits and depressions.
### Detecting flats
@@ -58,20 +128,37 @@ Flats can be detected using the `grid.detect_flats` method:
```python
# Detect flats
-flats = grid.detect_flats('flooded_dem')
+flats = grid.detect_flats(flooded_dem)
+```
+
+
+Plotting code...
+
+```python
# Plot flats
-plt.imshow(flats)
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+
+plt.imshow(flats, cmap='Greys_r', zorder=1)
+plt.title('Flats', size=14)
+plt.tight_layout()
```
-
+
+
+
+
+
### Resolving flats
Flats can be resolved using the `grid.resolve_flats` method:
```python
->>> grid.resolve_flats(data='flooded_dem', out_name='inflated_dem')
+inflated_dem = grid.resolve_flats(flooded_dem)
+flats = grid.detect_flats(inflated_dem)
+assert not flats.any()
```
### Finished product
@@ -80,13 +167,33 @@ After filling depressions and resolving flats, the flow direction can be determi
```python
# Compute flow direction based on corrected DEM
-grid.flowdir(data='inflated_dem', out_name='dir', dirmap=dirmap)
+fdir = grid.flowdir(inflated_dem)
# Compute flow accumulation based on computed flow direction
-grid.accumulation(data='dir', out_name='acc', dirmap=dirmap)
+acc = grid.accumulation(fdir)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+im = ax.imshow(acc, zorder=2,
+ cmap='cubehelix',
+ norm=colors.LogNorm(1, acc.max()),
+ interpolation='bilinear')
+plt.colorbar(im, ax=ax, label='Upstream Cells')
+plt.title('Flow Accumulation', size=14)
+plt.tight_layout()
```
-
+
+
+
+
+
## Burning DEMs
diff --git a/docs/extract-river-network.md b/docs/extract-river-network.md
index c292850..c81e7fb 100644
--- a/docs/extract-river-network.md
+++ b/docs/extract-river-network.md
@@ -5,29 +5,27 @@
The `grid.extract_river_network` method requires both a catchment grid and an accumulation grid. The catchment grid can be obtained from a flow direction grid, as shown in [catchments](https://mdbartos.github.io/pysheds/catchment.html). The accumulation grid can also be obtained from a flow direction grid, as shown in [accumulation](https://mdbartos.github.io/pysheds/accumulation.html).
```python
->>> import numpy as np
->>> from matplotlib import pyplot as plt
->>> from pysheds.grid import Grid
+from pysheds.grid import Grid
# Instantiate grid from raster
->>> grid = Grid.from_raster('../data/dem.tif', data_name='dem')
+grid = Grid.from_raster('./data/dem.tif')
+dem = grid.read_raster('./data/dem.tif')
# Resolve flats and compute flow directions
->>> grid.resolve_flats(data='dem', out_name='inflated_dem')
->>> grid.flowdir('inflated_dem', out_name='dir')
+inflated_dem = grid.resolve_flats(dem)
+fdir = grid.flowdir(inflated_dem)
# Specify outlet
->>> x, y = -97.294167, 32.73750
+x, y = -97.294167, 32.73750
# Delineate a catchment
->>> grid.catchment(data='dir', x=x, y=y, out_name='catch',
- recursionlimit=15000, xytype='label')
+catch = grid.catchment(x=x, y=y, fdir=fdir, xytype='coordinate')
# Clip the view to the catchment
->>> grid.clip_to('catch')
+grid.clip_to(catch)
# Compute accumulation
->>> grid.accumulation(data='catch', out_name='acc')
+acc = grid.accumulation(fdir, apply_output_mask=False)
```
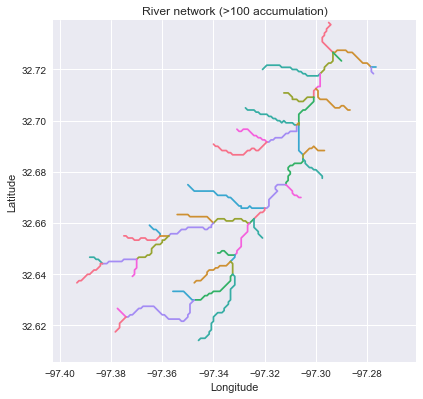
## Extracting the river network
@@ -36,29 +34,112 @@ To extract the river network at a given accumulation threshold, we can call the
```python
# Extract river network
->>> branches = grid.extract_river_network('catch', 'acc')
+branches = grid.extract_river_network(fdir, acc > 100)
```
+
+Plotting code...
+
+
+```python
+import numpy as np
+from matplotlib import pyplot as plt
+import seaborn as sns
+
+sns.set_palette('husl')
+fig, ax = plt.subplots(figsize=(8.5,6.5))
+
+plt.xlim(grid.bbox[0], grid.bbox[2])
+plt.ylim(grid.bbox[1], grid.bbox[3])
+ax.set_aspect('equal')
+
+for branch in branches['features']:
+ line = np.asarray(branch['geometry']['coordinates'])
+ plt.plot(line[:, 0], line[:, 1])
+
+_ = plt.title('Channel network (>100 accumulation)', size=14)
+```
+
+
+
+
+
The `grid.extract_river_network` method returns a dictionary in the geojson format. The branches can be plotted by iterating through the features:
+
+
+
```python
-# Plot branches
->>> for branch in branches['features']:
->>> line = np.asarray(branch['geometry']['coordinates'])
->>> plt.plot(line[:, 0], line[:, 1])
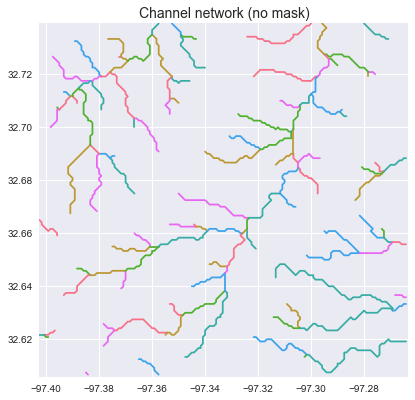
+branches = grid.extract_river_network(fdir, acc > 100, apply_output_mask=False)
```
-
+
+Plotting code...
+
+
+```python
+sns.set_palette('husl')
+fig, ax = plt.subplots(figsize=(8.5,6.5))
+plt.xlim(grid.bbox[0], grid.bbox[2])
+plt.ylim(grid.bbox[1], grid.bbox[3])
+ax.set_aspect('equal')
+
+for branch in branches['features']:
+ line = np.asarray(branch['geometry']['coordinates'])
+ plt.plot(line[:, 0], line[:, 1])
+
+_ = plt.title('Channel network (no mask)', size=14)
+```
+
+
+
+
+
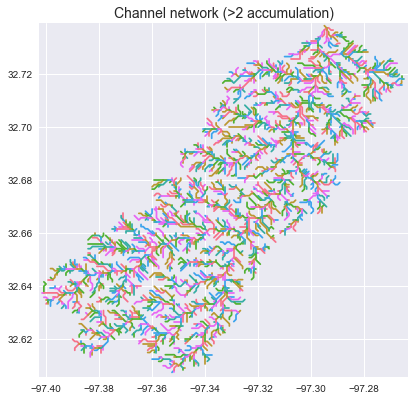
## Specifying the accumulation threshold
We can change the geometry of the returned river network by specifying different accumulation thresholds:
```python
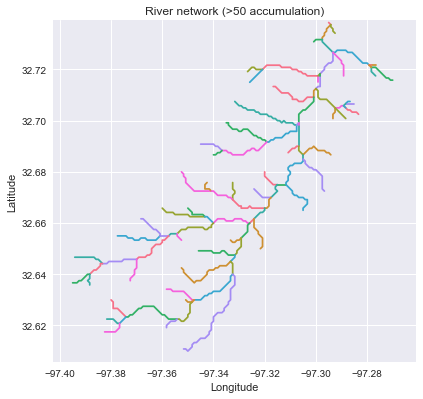
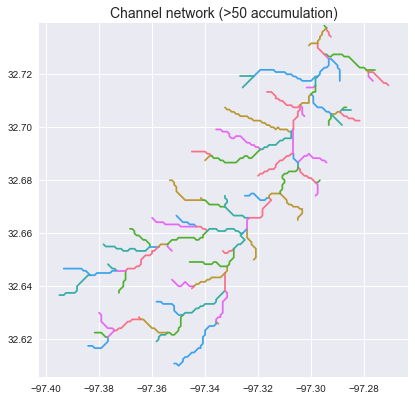
->>> branches_50 = grid.extract_river_network('catch', 'acc', threshold=50)
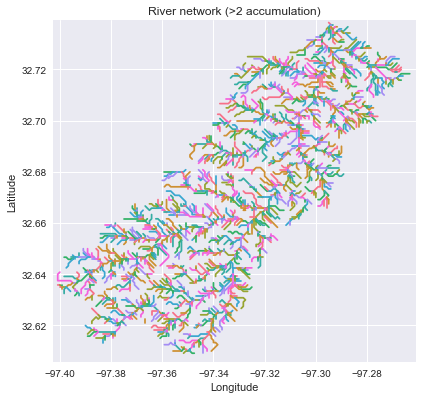
->>> branches_2 = grid.extract_river_network('catch', 'acc', threshold=2)
+branches_50 = grid.extract_river_network(fdir, acc > 50)
+branches_2 = grid.extract_river_network(fdir, acc > 2)
```
-
-
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8.5,6.5))
+
+plt.xlim(grid.bbox[0], grid.bbox[2])
+plt.ylim(grid.bbox[1], grid.bbox[3])
+ax.set_aspect('equal')
+
+for branch in branches_50['features']:
+ line = np.asarray(branch['geometry']['coordinates'])
+ plt.plot(line[:, 0], line[:, 1])
+
+_ = plt.title('Channel network (>50 accumulation)', size=14)
+
+sns.set_palette('husl')
+fig, ax = plt.subplots(figsize=(8.5,6.5))
+
+plt.xlim(grid.bbox[0], grid.bbox[2])
+plt.ylim(grid.bbox[1], grid.bbox[3])
+ax.set_aspect('equal')
+
+for branch in branches_2['features']:
+ line = np.asarray(branch['geometry']['coordinates'])
+ plt.plot(line[:, 0], line[:, 1])
+
+_ = plt.title('Channel network (>2 accumulation)', size=14)
+```
+
+
+
+
+
+
+
diff --git a/docs/file-io.md b/docs/file-io.md
index 6eabdc9..b77e54f 100644
--- a/docs/file-io.md
+++ b/docs/file-io.md
@@ -7,15 +7,14 @@
### Instantiating a grid from a raster
```python
->>> from pysheds.grid import Grid
->>> grid = Grid.from_raster('../data/dem.tif', data_name='dem')
+from pysheds.grid import Grid
+grid = Grid.from_raster('./data/dem.tif')
```
### Reading a raster file
```python
->>> grid = Grid()
->>> grid.read_raster('../data/dem.tif', data_name='dem')
+dem = grid.read_raster('./data/dem.tif')
```
## Reading from ASCII files
@@ -23,14 +22,13 @@
### Instantiating a grid from an ASCII grid
```python
->>> grid = Grid.from_ascii('../data/dir.asc', data_name='dir')
+grid = Grid.from_ascii('./data/dir.asc')
```
### Reading an ASCII grid
```python
->>> grid = Grid()
->>> grid.read_ascii('../data/dir.asc', data_name='dir')
+fdir = grid.read_ascii('./data/dir.asc', dtype=np.uint8)
```
## Windowed reading
@@ -39,38 +37,11 @@ If the raster file is very large, you can specify a window to read data from. Th
```python
# Instantiate a grid with data
->>> grid = Grid.from_raster('../data/dem.tif', data_name='dem')
+grid = Grid.from_raster('./data/dem.tif')
# Read windowed raster
->>> grid.read_raster('../data/nlcd_2011_impervious_2011_edition_2014_10_10.img',
- data_name='terrain', window=grid.bbox, window_crs=grid.crs)
-```
-
-## Adding in-memory datasets
-
-In-memory datasets from a python session can also be added.
-
-```python
-# Instantiate a grid with data
->>> grid = Grid.from_raster('../data/dem.tif', data_name='dem')
-
-# Add another copy of the DEM data as a Raster object
->>> grid.add_gridded_data(grid.dem, data_name='dem_copy')
-```
-
-Raw numpy arrays can also be added.
-
-```python
->>> import numpy as np
-
-# Generate random data
->>> data = np.random.randn(*grid.shape)
-
-# Add data to grid
->>> grid.add_gridded_data(data=data, data_name='random',
- affine=grid.affine,
- crs=grid.crs,
- nodata=0)
+terrain = grid.read_raster('./data/impervious_area.tiff',
+ window=grid.bbox, window_crs=grid.crs)
```
## Writing to raster files
@@ -78,72 +49,72 @@ Raw numpy arrays can also be added.
By default, the `grid.to_raster` method will write the grid's current view of the dataset.
```python
->>> grid = Grid.from_ascii('../data/dir.asc', data_name='dir')
->>> grid.to_raster('dir', 'test_dir.tif', blockxsize=16, blockysize=16)
+grid = Grid.from_ascii('./data/dir.asc')
+fdir = grid.read_ascii('./data/dir.asc', dtype=np.uint8)
+grid.to_raster(fdir, 'test_dir.tif', blockxsize=16, blockysize=16)
```
-If the full dataset is desired, set `view=False`:
+If the full dataset is desired, set the `target_view` to the dataset's `viewfinder`:
```python
->>> grid.to_raster('dir', 'test_dir.tif', view=False,
- blockxsize=16, blockysize=16)
+grid.to_raster(fdir, 'test_dir.tif', target_view=fdir.viewfinder,
+ blockxsize=16, blockysize=16)
```
-If you want the output file to be masked with the grid mask, set `apply_mask=True`:
+If you want the output file to be masked with the grid mask, set `apply_output_mask=True`:
```python
->>> grid.to_raster('dir', 'test_dir.tif',
- view=True, apply_mask=True,
- blockxsize=16, blockysize=16)
+grid.to_raster(fdir, 'test_dir.tif', apply_output_mask=True,
+ blockxsize=16, blockysize=16)
```
## Writing to ASCII files
```python
->>> grid.to_ascii('dir', 'test_dir.asc')
+grid.to_ascii(fdir, 'test_dir.asc')
```
## Writing to shapefiles
-For more detail, see the [jupyter notebook](https://github.com/mdbartos/pysheds/blob/master/recipes/write_shapefile.ipynb).
-
```python
->>> import fiona
+import fiona
->>> grid = Grid.from_ascii('../data/dir.asc', data_name='dir')
+grid = Grid.from_ascii('./data/dir.asc')
# Specify pour point
->>> x, y = -97.294167, 32.73750
+x, y = -97.294167, 32.73750
# Delineate the catchment
->>> grid.catchment(data='dir', x=x, y=y, out_name='catch',
- recursionlimit=15000, xytype='label',
- nodata_out=0)
+catch = grid.catchment(x=x, y=y, fdir=fdir,
+ xytype='coordinate')
# Clip to catchment
->>> grid.clip_to('catch')
+grid.clip_to(catch)
+
+# Create view
+catch_view = grid.view(catch, dtype=np.uint8)
# Create a vector representation of the catchment mask
->>> shapes = grid.polygonize()
+shapes = grid.polygonize(catch_view)
# Specify schema
->>> schema = {
+schema = {
'geometry': 'Polygon',
'properties': {'LABEL': 'float:16'}
- }
+}
# Write shapefile
->>> with fiona.open('catchment.shp', 'w',
- driver='ESRI Shapefile',
- crs=grid.crs.srs,
- schema=schema) as c:
- i = 0
- for shape, value in shapes:
- rec = {}
- rec['geometry'] = shape
- rec['properties'] = {'LABEL' : str(value)}
- rec['id'] = str(i)
- c.write(rec)
- i += 1
+with fiona.open('catchment.shp', 'w',
+ driver='ESRI Shapefile',
+ crs=grid.crs.srs,
+ schema=schema) as c:
+ i = 0
+ for shape, value in shapes:
+ rec = {}
+ rec['geometry'] = shape
+ rec['properties'] = {'LABEL' : str(value)}
+ rec['id'] = str(i)
+ c.write(rec)
+ i += 1
```
diff --git a/docs/flow-directions.md b/docs/flow-directions.md
index 3ec05d5..b6e42c0 100644
--- a/docs/flow-directions.md
+++ b/docs/flow-directions.md
@@ -12,16 +12,17 @@ Note that for most use cases, DEMs should be conditioned before computing flow d
```python
# Import modules
->>> from pysheds.grid import Grid
+from pysheds.grid import Grid
# Read raw DEM
->>> grid = Grid.from_raster('../data/roi_10m', data_name='dem')
+grid = Grid.from_raster('./data/roi_10m')
+dem = grid.read_raster('./data/roi_10m')
# Fill depressions
->>> grid.fill_depressions(data='dem', out_name='flooded_dem')
+flooded_dem = grid.fill_depressions(dem)
# Resolve flats
->>> grid.resolve_flats(data='flooded_dem', out_name='inflated_dem')
+inflated_dem = grid.resolve_flats(flooded_dem)
```
### Computing D8 flow directions
@@ -29,8 +30,17 @@ Note that for most use cases, DEMs should be conditioned before computing flow d
After filling depressions, the flow directions can be computed using the `grid.flowdir` method:
```python
->>> grid.flowdir(data='inflated_dem', out_name='dir')
->>> grid.dir
+fdir = grid.flowdir(inflated_dem)
+```
+
+
+Output...
+
+
+```python
+fdir
+```
+```
Raster([[ 0, 0, 0, ..., 0, 0, 0],
[ 0, 2, 2, ..., 4, 1, 0],
[ 0, 1, 2, ..., 4, 2, 0],
@@ -40,6 +50,11 @@ Raster([[ 0, 0, 0, ..., 0, 0, 0],
[ 0, 0, 0, ..., 0, 0, 0]])
```
+
+
+
+
+
### Directional mappings
Cardinal and intercardinal directions are represented by numeric values in the output grid. By default, the ESRI scheme is used:
@@ -56,9 +71,18 @@ Cardinal and intercardinal directions are represented by numeric values in the o
An alternative directional mapping can be specified using the `dirmap` keyword argument:
```python
->>> dirmap = (1, 2, 3, 4, 5, 6, 7, 8)
->>> grid.flowdir(data='inflated_dem', out_name='dir', dirmap=dirmap)
->>> grid.dir
+dirmap = (1, 2, 3, 4, 5, 6, 7, 8)
+fdir = grid.flowdir(inflated_dem, dirmap=dirmap)
+```
+
+
+Output...
+
+
+```python
+fdir
+```
+```
Raster([[0, 0, 0, ..., 0, 0, 0],
[0, 4, 4, ..., 5, 3, 0],
[0, 3, 4, ..., 5, 4, 0],
@@ -68,13 +92,8 @@ Raster([[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0]])
```
-### Labeling pits and flats
-
-If pits or flats are present in the originating DEM, these cells can be labeled in the output array using the `pits` and `flats` keyword arguments:
-
-```python
->>> grid.flowdir(data='inflated_dem', out_name='dir', pits=0, flats=-1)
-```
+
+
## D-infinity flow directions
@@ -83,8 +102,17 @@ While the D8 routing scheme allows each cell to be routed to only one of its nea
D-infinity routing can be selected by using the keyword argument `routing='dinf'`.
```python
->>> grid.flowdir(data='inflated_dem', out_name='dir', routing='dinf')
->>> grid.dir
+fdir = grid.flowdir(inflated_dem, routing='dinf')
+```
+
+
+Output...
+
+
+```python
+fdir
+```
+```python
Raster([[ nan, nan, nan, ..., nan, nan, nan],
[ nan, 5.498, 5.3 , ..., 4.712, 0. , nan],
[ nan, 0. , 5.498, ..., 4.712, 5.176, nan],
@@ -94,15 +122,26 @@ Raster([[ nan, nan, nan, ..., nan, nan, nan],
[ nan, nan, nan, ..., nan, nan, nan]])
```
+
+
+
Note that each entry takes a value between 0 and 2π, with `np.nan` representing unknown flow directions.
Note that you must also specify `routing=dinf` when using `grid.catchment` or `grid.accumulation` with a D-infinity output grid.
## Effect of map projections on routing
-The choice of map projection affects the slopes between neighboring cells. The map projection can be specified using the `as_crs` keyword argument.
+The choice of map projection affects the slopes between neighboring cells.
```python
->>> new_crs = pyproj.Proj('+init=epsg:3083')
->>> grid.flowdir(data='inflated_dem', out_name='proj_dir', as_crs=new_crs)
+# Specify new map projection
+import pyproj
+new_crs = pyproj.Proj('epsg:3083')
+
+# Convert CRS of dataset and grid
+proj_dem = inflated_dem.to_crs(new_crs)
+grid.viewfinder = proj_dem.viewfinder
+
+# Compute flow directions on projected grid
+proj_fdir = grid.flowdir(proj_dem)
```
diff --git a/docs/flow-distance.md b/docs/flow-distance.md
index 07b4123..551f2d3 100644
--- a/docs/flow-distance.md
+++ b/docs/flow-distance.md
@@ -2,42 +2,62 @@
## Preliminaries
-The `grid.flow_distance` method operates on a flow direction grid. This flow direction grid can be computed from a DEM, as shown in [flow directions](https://mdbartos.github.io/pysheds/flow-directions.html).
+The `grid.distance_to_outlet` method operates on a flow direction grid. This flow direction grid can be computed from a DEM, as shown in [flow directions](https://mdbartos.github.io/pysheds/flow-directions.html).
```python
->>> import numpy as np
->>> from matplotlib import pyplot as plt
->>> from pysheds.grid import Grid
+import numpy as np
+from matplotlib import pyplot as plt
+import seaborn as sns
+from pysheds.grid import Grid
# Instantiate grid from raster
->>> grid = Grid.from_raster('../data/dem.tif', data_name='dem')
+grid = Grid.from_raster('./data/dem.tif')
+dem = grid.read_raster('./data/dem.tif')
# Resolve flats and compute flow directions
->>> grid.resolve_flats(data='dem', out_name='inflated_dem')
->>> grid.flowdir('inflated_dem', out_name='dir')
+inflated_dem = grid.resolve_flats(dem)
+fdir = grid.flowdir(inflated_dem)
```
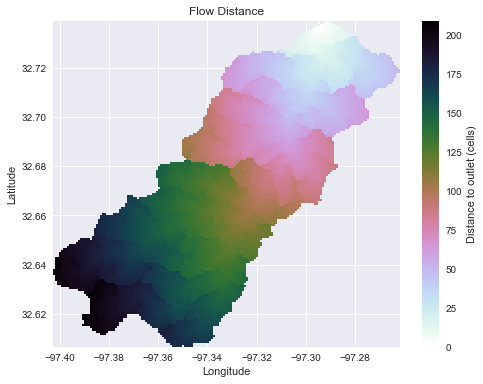
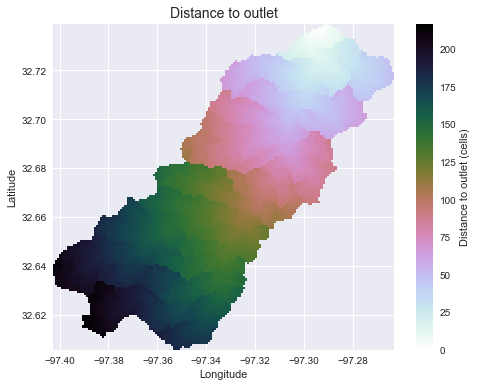
## Computing flow distance
-Flow distance is computed using the `grid.flow_distance` method:
+Flow distance is computed using the `grid.distance_to_outlet` method:
```python
# Specify outlet
->>> x, y = -97.294167, 32.73750
+x, y = -97.294167, 32.73750
# Delineate a catchment
->>> grid.catchment(data='dir', x=x, y=y, out_name='catch',
- recursionlimit=15000, xytype='label')
+catch = grid.catchment(x=x, y=y, fdir=fdir, xytype='coordinate')
# Clip the view to the catchment
->>> grid.clip_to('catch')
+grid.clip_to(catch)
-# Compute flow distance
->>> grid.flow_distance(x, y, data='catch',
- out_name='dist', xytype='label')
+# Compute distance to outlet
+dist = grid.distance_to_outlet(x, y, fdir=fdir, xytype='coordinate')
```
-
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.grid('on', zorder=0)
+im = ax.imshow(dist, extent=grid.extent, zorder=2,
+ cmap='cubehelix_r')
+plt.colorbar(im, ax=ax, label='Distance to outlet (cells)')
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.title('Distance to outlet', size=14)
+```
+
+
+
+
+
+
Note that the `grid.flow_distance` method requires an outlet point, much like the `grid.catchment` method.
@@ -46,14 +66,28 @@ Note that the `grid.flow_distance` method requires an outlet point, much like th
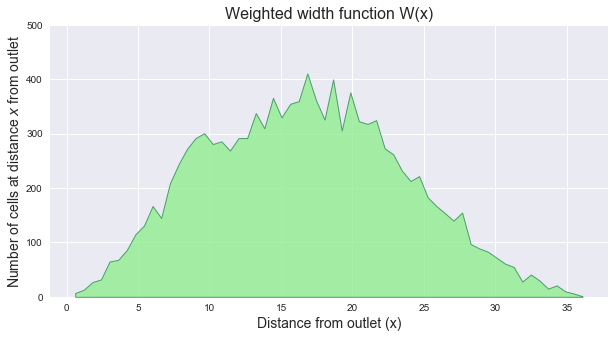
The width function of a catchment `W(x)` represents the number of cells located at a topological distance `x` from the outlet. One can compute the width function of the catchment by counting the number of cells at a distance `x` from the outlet for each distance `x`.
```python
-# Get flow distance array
->>> dists = grid.view('dist')
-
# Compute width function
->>> W = np.bincount(dists[dists != 0].astype(int))
+W = np.bincount(dist[np.isfinite(dist)].astype(int))
```
-
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(10, 5))
+plt.fill_between(np.arange(len(W)), W, 0, edgecolor='seagreen', linewidth=1, facecolor='lightgreen', alpha=0.8)
+plt.ylim(0, 100)
+plt.ylabel(r'Number of cells at distance $x$ from outlet', size=14)
+plt.xlabel(r'Distance from outlet (x)', size=14)
+plt.title('Width function W(x)', size=16)
+```
+
+
+
+
+
+
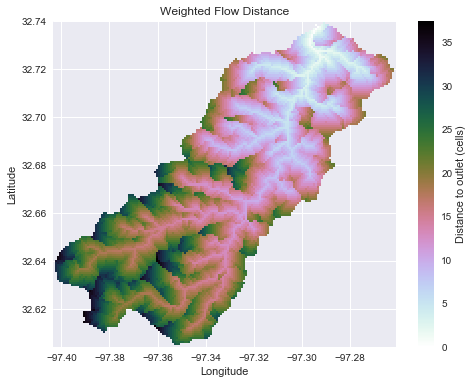
## Computing weighted flow distance
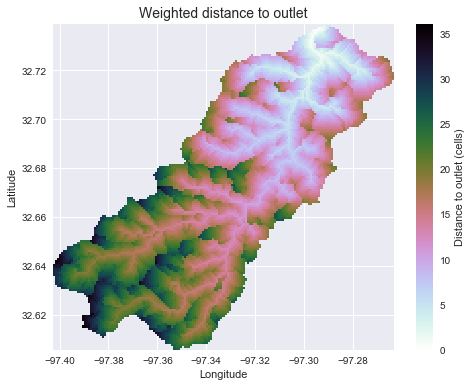
@@ -61,23 +95,42 @@ Weights can be used to adjust the distance metric between cells. This can be use
```python
# Clip the bounding box to the catchment
->>> grid.clip_to('catch', pad=(1,1,1,1))
+grid.clip_to(catch)
# Compute flow accumulation
->>> grid.accumulation(data='catch', out_name='acc')
->>> acc = grid.view('acc')
+acc = grid.accumulation(fdir)
# Assume that water in channelized cells (>= 100 accumulation) travels 10 times faster
# than hillslope cells (< 100 accumulation)
->>> weights = (np.where(acc, 0.1, 0)
- + np.where((0 < acc) & (acc <= 100), 1, 0)).ravel()
-
-# Compute weighted flow distance
->>> dists = grid.flow_distance(data='catch', x=x, y=y, weights=weights,
- xytype='label', inplace=False)
+weights = acc.copy()
+weights[acc >= 100] = 0.1
+weights[(0 < acc) & (acc < 100)] = 1.
+
+# Compute weighted distance to outlet
+dist = grid.distance_to_outlet(x=x, y=y, fdir=fdir, weights=weights, xytype='coordinate')
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.grid('on', zorder=0)
+im = ax.imshow(dist, extent=grid.extent, zorder=2,
+ cmap='cubehelix_r')
+plt.colorbar(im, ax=ax, label='Distance to outlet (cells)')
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.title('Weighted distance to outlet', size=14)
```
-
+
+
+
+
+
### Weighted width function
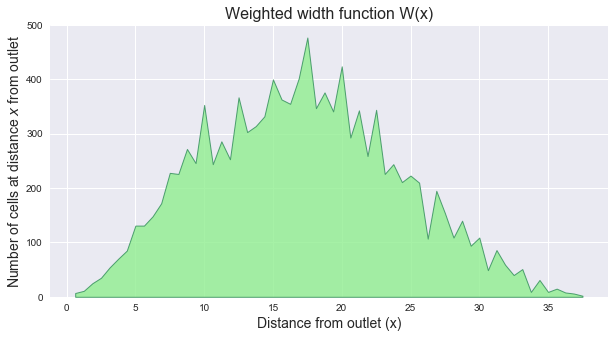
@@ -85,8 +138,25 @@ Note that because the distances are no longer integers, the weighted width funct
```python
# Compute weighted width function
-hist, bin_edges = np.histogram(dists[dists != 0].ravel(),
- range=(0,dists.max()+1e-5), bins=40)
+distances = dist[np.isfinite(dist)].ravel()
+hist, bin_edges = np.histogram(distances, range=(0,distances.max()+1e-5),
+ bins=60)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(10, 5))
+plt.fill_between(bin_edges[1:], hist, 0, edgecolor='seagreen', linewidth=1, facecolor='lightgreen', alpha=0.8)
+plt.ylim(0, 500)
+plt.ylabel(r'Number of cells at distance $x$ from outlet', size=14)
+plt.xlabel(r'Distance from outlet (x)', size=14)
+plt.title('Weighted width function W(x)', size=16)
```
-
+
+
+
+
diff --git a/docs/hand.md b/docs/hand.md
new file mode 100644
index 0000000..5b313da
--- /dev/null
+++ b/docs/hand.md
@@ -0,0 +1,172 @@
+# Inundation mapping with HAND
+
+The HAND function can be used to estimate inundation extent.
+
+## Computing the height above nearest drainage
+
+First, we begin by computing the flow directions and accumulation for a given DEM.
+
+```python
+import numpy as np
+from pysheds.grid import Grid
+
+# Instantiate grid from raster
+grid = Grid.from_raster('./data/dem.tif')
+dem = grid.read_raster('./data/dem.tif')
+
+# Resolve flats and compute flow directions
+inflated_dem = grid.resolve_flats(dem)
+fdir = grid.flowdir(inflated_dem)
+
+# Compute accumulation
+acc = grid.accumulation(fdir)
+```
+
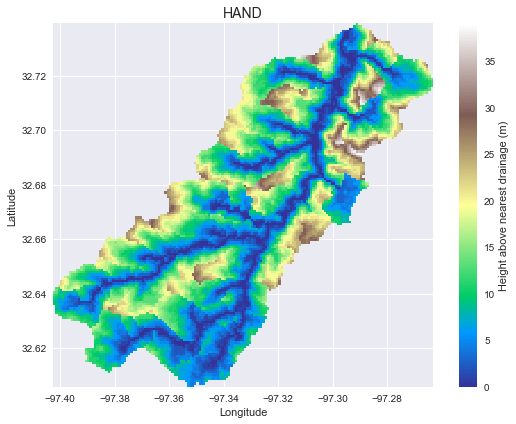
+We can then compute the height above nearest drainage (HAND) by providing a DEM, a flow direction grid, and a channel mask. For this demonstration, we will take the channel mask to be all cells with accumulation greater than 200.
+
+```python
+# Compute height above nearest drainage
+hand = grid.compute_hand(fdir, dem, acc > 200)
+```
+
+Next, we will clip the HAND raster to a catchment to make it easier to work with.
+
+```python
+# Specify outlet
+x, y = -97.294167, 32.73750
+
+# Delineate a catchment
+catch = grid.catchment(x=x, y=y, fdir=fdir, xytype='coordinate')
+
+# Clip to the catchment
+grid.clip_to(catch)
+
+# Create a view of HAND in the catchment
+hand_view = grid.view(hand, nodata=np.nan)
+```
+
+
+Plotting code...
+
+
+```python
+from matplotlib import pyplot as plt
+import seaborn as sns
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.imshow(hand_view,
+ extent=grid.extent, cmap='terrain', zorder=1)
+plt.colorbar(label='Height above nearest drainage (m)')
+plt.grid(zorder=0)
+plt.title('HAND', size=14)
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.tight_layout()
+```
+
+
+
+
+
+
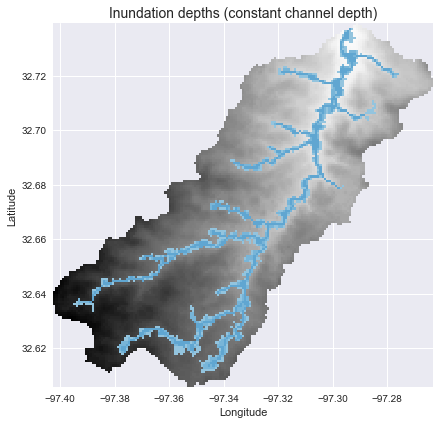
+## Estimating inundation extent (constant channel depth)
+
+We can estimate the inundation extent (assuming a constant channel depth) using a simple binary threshold:
+
+```python
+inundation_extent = np.where(hand_view < 3, 3 - hand_view, np.nan)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+dem_view = grid.view(dem, nodata=np.nan)
+plt.imshow(dem_view, extent=grid.extent, cmap='Greys', zorder=1)
+plt.imshow(inundation_extent, extent=grid.extent,
+ cmap='Blues', vmin=-5, vmax=10, zorder=2)
+plt.grid(zorder=0)
+plt.title('Inundation depths (constant channel depth)', size=14)
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.tight_layout()
+```
+
+
+
+
+
+
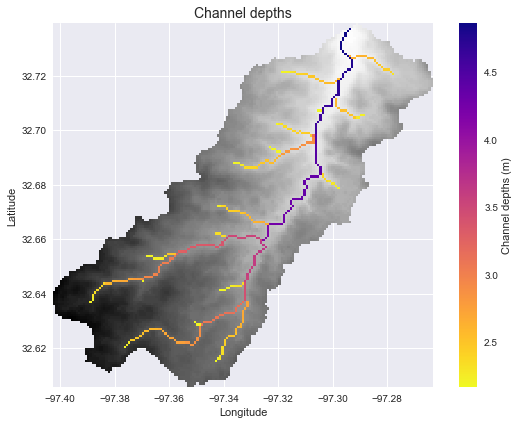
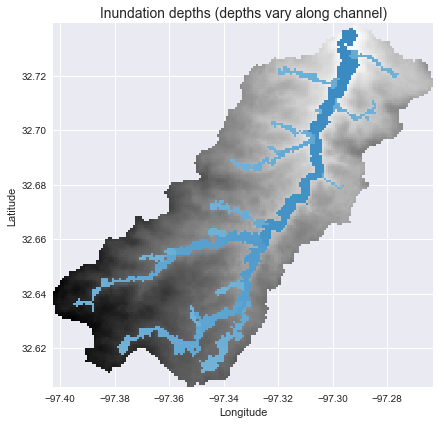
+## Estimating inundation extent (varying channel depth)
+
+We can also estimate the inundation extent given a continuously varying channel depth. First, for the purposes of demonstration, we can generate an estimate of the channel depths using a power law formulation:
+
+```python
+# Clip accumulation to current view
+acc_view = grid.view(acc, nodata=np.nan)
+
+# Create empirical channel depths based on power law
+channel_depths = np.where(acc_view > 200, 0.75 * acc_view**0.2, 0)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+dem_view = grid.view(dem, nodata=np.nan)
+plt.imshow(dem_view, extent=grid.extent, cmap='Greys', zorder=1)
+plt.imshow(np.where(acc_view > 200, channel_depths, np.nan),
+ extent=grid.extent, cmap='plasma_r', zorder=2)
+plt.colorbar(label='Channel depths (m)')
+plt.grid(zorder=0)
+plt.title('Channel depths', size=14)
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.tight_layout()
+```
+
+
+
+
+
+
+To find the corresponding depths in the non-channel cells, we can use the `return_index=True` argument in the `compute_hand` function to return the index of the channel cell that is topologically nearest to each cell in the DEM. We can then estimate the inundation depth at each cell:
+
+```python
+# Compute index of nearest channel cell for each cell
+hand_idx = grid.compute_hand(fdir, dem, acc > 200, return_index=True)
+hand_idx_view = grid.view(hand_idx, nodata=0)
+
+# Compute inundation depths
+inundation_depths = np.where(hand_idx_view, channel_depths.flat[hand_idx_view], np.nan)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+dem_view = grid.view(dem, nodata=np.nan)
+plt.imshow(dem_view, extent=grid.extent, cmap='Greys', zorder=1)
+plt.imshow(np.where(hand_view < inundation_depths, inundation_depths, np.nan), extent=grid.extent,
+ cmap='Blues', vmin=-5, vmax=10, zorder=2)
+plt.grid(zorder=0)
+plt.title('Inundation depths (depths vary along channel)', size=14)
+plt.xlabel('Longitude')
+plt.ylabel('Latitude')
+plt.tight_layout()
+```
+
+
+
+
+
+
diff --git a/docs/raster.md b/docs/raster.md
index 6624b8e..515ba13 100644
--- a/docs/raster.md
+++ b/docs/raster.md
@@ -5,14 +5,22 @@
When a dataset is read from a file, it will automatically be saved as a `Raster` object.
```python
->>> from pysheds.grid import Grid
+from pysheds.grid import Grid
->>> grid = Grid.from_raster('../data/dem.tif', data_name='dem')
->>> dem = grid.dem
+grid = Grid.from_raster('./data/dem.tif')
+dem = grid.read_raster('./data/dem.tif')
```
+Here, `grid` is the `Grid` instance, and `dem` is a `Raster` object. If we call the `Raster` object, we will see that it looks much like a numpy array.
+
```python
->>> dem
+dem
+```
+
+Output...
+
+
+```
Raster([[214, 212, 210, ..., 177, 177, 175],
[214, 210, 207, ..., 176, 176, 174],
[211, 209, 204, ..., 174, 174, 174],
@@ -22,22 +30,27 @@ Raster([[214, 212, 210, ..., 177, 177, 175],
[268, 267, 266, ..., 216, 217, 216]], dtype=int16)
```
+
+
+
## Calling methods on rasters
-Primary `Grid` methods (such as flow direction determination and catchment delineation) can be called directly on `Raster objects`:
+Hydrologic functions (such as flow direction determination and catchment delineation) accept and return `Raster objects`:
```python
->>> grid.resolve_flats(dem, out_name='inflated_dem')
+inflated_dem = grid.resolve_flats(dem)
+fdir = grid.flowdir(inflated_dem)
```
-Grid methods can also return `Raster` objects by specifying `inplace=False`:
-
```python
->>> fdir = grid.flowdir(grid.inflated_dem, inplace=False)
+fdir
```
-```python
->>> fdir
+
+Output...
+
+
+```
Raster([[ 0, 0, 0, ..., 0, 0, 0],
[ 0, 2, 2, ..., 4, 1, 0],
[ 0, 1, 2, ..., 4, 2, 0],
@@ -47,58 +60,159 @@ Raster([[ 0, 0, 0, ..., 0, 0, 0],
[ 0, 0, 0, ..., 0, 0, 0]])
```
+
+
+
+
+
## Raster attributes
-### Affine transform
+### Viewfinder
+
+The viewfinder attribute contains all the information needed to specify the Raster's spatial reference system. It can be accessed using the `viewfinder` attribute.
+
+```python
+dem.viewfinder
+```
+
+
+Output...
+
+
+```
+
+```
+
+
+
-An affine transform uniquely specifies the spatial location of each cell in a gridded dataset.
+
+The viewfinder contains five necessary elements that completely define the spatial reference system.
+
+ - `affine`: An affine transformation matrix.
+ - `shape`: The desired shape (rows, columns).
+ - `crs` : The coordinate reference system.
+ - `mask` : A boolean array indicating which cells are masked.
+ - `nodata` : A sentinel value indicating 'no data'.
+
+### Affine transformation matrix
+
+An affine transform uniquely specifies the spatial location of each cell in a gridded dataset. In a `Raster`, the affine transform is given by the `affine` attribute.
```python
->>> dem.affine
+dem.affine
+```
+
+Output...
+
+
+```
Affine(0.0008333333333333, 0.0, -100.0,
0.0, -0.0008333333333333, 34.9999999999998)
```
+
+
+
The elements of the affine transform `(a, b, c, d, e, f)` are:
-- **a**: cell width
-- **b**: row rotation (generally zero)
-- **c**: x-coordinate of upper-left corner of upper-leftmost cell
-- **d**: column rotation (generally zero)
-- **e**: cell height
-- **f**: y-coordinate of upper-left corner of upper-leftmost cell
+- **a**: Horizontal scaling (equal to cell width if no rotation)
+- **b**: Horizontal shear
+- **c**: Horizontal translation (x-coordinate of upper-left corner of upper-leftmost cell)
+- **d**: Vertical shear
+- **e**: Vertical scaling (equal to cell height if no rotation)
+- **f**: Vertical translation (y-coordinate of upper-left corner of upper-leftmost cell)
The affine transform uses the [affine](https://pypi.org/project/affine/) module.
-### Coordinate reference system
+### Shape
-The coordinate reference system (CRS) defines a map projection for the gridded dataset. For datasets read from a raster file, the CRS will be detected and populated automaticaally.
+The shape is equal to the shape of the underlying array (i.e. number of rows, number of columns).
```python
->>> dem.crs
-
+dem.shape
+```
+
+
+Output...
+
+
+```
+(359, 367)
```
-A human-readable representation of the CRS can also be obtained as follows:
+
+
+
+### Coordinate reference system
+
+The coordinate reference system (CRS) defines a map projection for the gridded
+dataset. The `crs` attribute is a `pyproj.Proj` object. For datasets read from a
+raster file, the CRS will be detected and populated automaticaally.
```python
->>> dem.crs.srs
-'+init=epsg:4326 '
+dem.crs
+```
+
+
+Output...
+
+
+```
+Proj('+proj=longlat +datum=WGS84 +no_defs', preserve_units=True)
```
+
+
+
This example dataset has a geographic projection (meaning that coordinates are defined in terms of latitudes and longitudes).
The coordinate reference system uses the [pyproj](https://pypi.org/project/pyproj/) module.
+### Mask
+
+The mask is a boolean array indicating which cells in the dataset should be masked in the output view.
+
+```python
+dem.mask
+```
+
+
+Output...
+
+
+```
+array([[ True, True, True, ..., True, True, True],
+ [ True, True, True, ..., True, True, True],
+ [ True, True, True, ..., True, True, True],
+ ...,
+ [ True, True, True, ..., True, True, True],
+ [ True, True, True, ..., True, True, True],
+ [ True, True, True, ..., True, True, True]])
+```
+
+
+
+
### "No data" value
The `nodata` attribute specifies the value that indicates missing or invalid data.
```python
->>> dem.nodata
+dem.nodata
+```
+
+
+Output...
+
+
+```
-32768
```
+
+
+
### Derived attributes
Other attributes are derived from these primary attributes:
@@ -106,21 +220,48 @@ Other attributes are derived from these primary attributes:
#### Bounding box
```python
->>> dem.bbox
+dem.bbox
+```
+
+
+Output...
+
+
+```
(-97.4849999999961, 32.52166666666537, -97.17833333332945, 32.82166666666536)
```
+
+
+
#### Extent
```python
->>> dem.extent
+dem.extent
+```
+
+
+Output...
+
+
+```
(-97.4849999999961, -97.17833333332945, 32.52166666666537, 32.82166666666536)
```
+
+
+
#### Coordinates
```python
->>> dem.coords
+dem.coords
+```
+
+
+Output...
+
+
+```
array([[ 32.82166667, -97.485 ],
[ 32.82166667, -97.48416667],
[ 32.82166667, -97.48333333],
@@ -130,11 +271,117 @@ array([[ 32.82166667, -97.485 ],
[ 32.52333333, -97.18 ]])
```
-### Numpy attributes
+
+
+
+## Instantiating Rasters
-A `Raster` object also inherits all attributes and methods from numpy ndarrays.
+Rasters can be instantiated directly using the `pysheds.Raster` class. Both an array-like object and a `ViewFinder` must be provided.
```python
->>> dem.shape
-(359, 367)
+from pysheds.view import Raster, ViewFinder
+
+array = np.random.randn(*grid.shape)
+raster = Raster(array, viewfinder=grid.viewfinder)
+```
+
+
+Output...
+
+
+```
+raster
+
+Raster([[-0.71876505, -0.35747123, -0.3296262 , ..., -0.07522118,
+ -0.86431367, -0.45065405],
+ [-1.12477409, 2.28759514, 0.5855458 , ..., -0.43795955,
+ 0.42813309, 0.03900371],
+ [-1.33345727, 1.03254272, 0.0904066 , ..., 0.06465593,
+ -1.09938815, 1.1821455 ],
+ ...,
+ [ 0.67330805, 0.37022934, 0.13783694, ..., -1.59943506,
+ 0.65154575, -0.58218991],
+ [ 0.67738517, 0.43696016, 1.09402764, ..., -1.63815592,
+ 1.67867785, 0.16609381],
+ [ 1.17302635, 0.31176851, 1.79257942, ..., -0.48385788,
+ 1.38478075, -0.76431488]])
+```
+
+
+
+
+We can also instantiate the raster using our own custom `ViewFinder`.
+
+```python
+raster = Raster(array, viewfinder=ViewFinder(shape=array.shape))
+```
+
+Note that the `affine` transformation defaults to the identity matrix, the `nodata` value defaults to zero, the `crs` defaults to geographic coordinates, and the `mask` defaults to a boolean array of ones. If a `shape` is not provided, the shape of the viewfinder defaults to `(1, 1)`. However, when instantiating a `Raster`, the shape of the viewfinder and the shape of the array-like object must be identical.
+
+```python
+raster.viewfinder
+```
+
+
+Output...
+
+
+```
+'affine' : Affine(1.0, 0.0, 0.0,
+ 0.0, 1.0, 0.0)
+'shape' : (359, 367)
+'nodata' : 0
+'crs' : Proj('+proj=longlat +datum=WGS84 +no_defs', preserve_units=True)
+'mask' : array([[ True, True, True, ..., True, True, True],
+ [ True, True, True, ..., True, True, True],
+ [ True, True, True, ..., True, True, True],
+ ...,
+ [ True, True, True, ..., True, True, True],
+ [ True, True, True, ..., True, True, True],
+ [ True, True, True, ..., True, True, True]])
+```
+
+
+
+
+
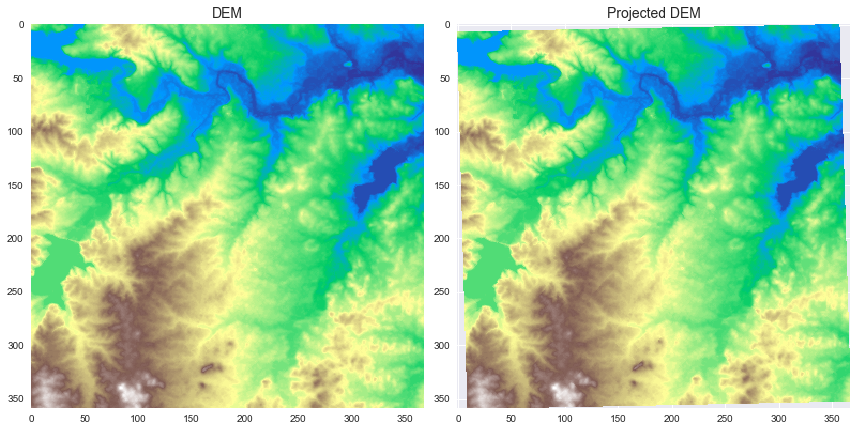
+## Converting the Raster coordinate reference system
+
+The Raster can be transformed to a new coordinate reference system using the `to_crs` method:
+
+```python
+import pyproj
+import numpy as np
+
+# Initialize new CRS
+new_crs = pyproj.Proj('epsg:3083')
+
+# Convert CRS of dataset and set nodata value for better plotting
+dem.nodata = np.nan
+proj_dem = dem.to_crs(new_crs)
+```
+
+
+Plotting code...
+
+
+```python
+import matplotlib.pyplot as plt
+import seaborn as sns
+
+fig, ax = plt.subplots(1, 2, figsize=(12,8))
+fig.patch.set_alpha(0)
+ax[0].imshow(dem, cmap='terrain', zorder=1)
+ax[1].imshow(proj_dem, cmap='terrain', zorder=1)
+ax[0].set_title('DEM', size=14)
+ax[1].set_title('Projected DEM', size=14)
+plt.tight_layout()
```
+
+
+
+
+Note that the projected Raster appears slightly rotated to the counterclockwise direction.
+
+
+
diff --git a/docs/views.md b/docs/views.md
index 6d62ad6..de82ce9 100644
--- a/docs/views.md
+++ b/docs/views.md
@@ -1,30 +1,78 @@
# Views
-The `grid.view` method returns a copy of a dataset cropped to the grid's current view. The grid's current view is defined by the following attributes:
+The `grid.view` method returns a copy of a dataset cropped to the grid's current view. The grid's current view is defined by its `viewfinder` attribute, which contains five properties that fully define the spatial reference system:
-- `affine`: An affine transform that defines the coordinates of the top-left cell, along with the cell resolution and rotation.
-- `crs`: The coordinate reference system of the grid.
-- `shape`: The shape of the grid (number of rows by number of columns)
-- `mask`: A boolean array that defines which cells will be masked in the output `Raster`.
+ - `affine`: An affine transformation matrix.
+ - `shape`: The desired shape (rows, columns).
+ - `crs` : The coordinate reference system.
+ - `mask` : A boolean array indicating which cells are masked.
+ - `nodata` : A sentinel value indicating 'no data'.
## Initializing the grid view
The grid's view will be populated automatically upon reading the first dataset.
```python
->>> grid = Grid.from_raster('../data/dem.tif',
- data_name='dem')
->>> grid.affine
+grid = Grid.from_raster('./data/dem.tif')
+```
+
+```python
+grid.affine
+```
+
+
+Output...
+
+
+```
Affine(0.0008333333333333, 0.0, -97.4849999999961,
0.0, -0.0008333333333333, 32.82166666666536)
-
->>> grid.crs
-
+```
+
+
+
+
+
+```python
+grid.crs
+```
+
+
+Output...
+
+
+```
+Proj('+proj=longlat +datum=WGS84 +no_defs', preserve_units=True)
+```
+
+
+
+
+
+```python
+grid.shape
+```
->>> grid.shape
+
+Output...
+
+
+```
(359, 367)
+```
+
+
+
+
+```python
+grid.mask
+```
+
+
+Output...
+
->>> grid.mask
+```
array([[ True, True, True, ..., True, True, True],
[ True, True, True, ..., True, True, True],
[ True, True, True, ..., True, True, True],
@@ -34,40 +82,133 @@ array([[ True, True, True, ..., True, True, True],
[ True, True, True, ..., True, True, True]])
```
+
+
+
We can verify that the spatial reference system is the same as that of the originating dataset:
```python
->>> grid.affine == grid.dem.affine
+dem = grid.read_raster('./data/dem.tif')
+```
+
+```python
+grid.affine == dem.affine
+```
+
+
+Output...
+
+
+```
True
->>> grid.crs == grid.dem.crs
+```
+
+
+
+
+```python
+grid.crs == dem.crs
+```
+
+
+Output...
+
+
+```
True
->>> grid.shape == grid.dem.shape
+```
+
+
+
+
+```python
+grid.shape == dem.shape
+```
+
+
+Output...
+
+
+```
True
->>> (grid.mask == grid.dem.mask).all()
+```
+
+
+
+
+
+```python
+(grid.mask == dem.mask).all()
+```
+
+
+Output...
+
+
+```
True
```
+
+
+
+
## Viewing datasets
First, let's delineate a watershed and use the `grid.view` method to get the results.
```python
# Resolve flats
->>> grid.resolve_flats(data='dem', out_name='inflated_dem')
+inflated_dem = grid.resolve_flats(dem)
+
+# Compute flow directions
+fdir = grid.flowdir(inflated_dem)
# Specify pour point
->>> x, y = -97.294167, 32.73750
+x, y = -97.294167, 32.73750
# Delineate the catchment
->>> grid.catchment(data='dir', x=x, y=y, out_name='catch',
- recursionlimit=15000, xytype='label')
+catch = grid.catchment(x=x, y=y, fdir=fdir, xytype='coordinate')
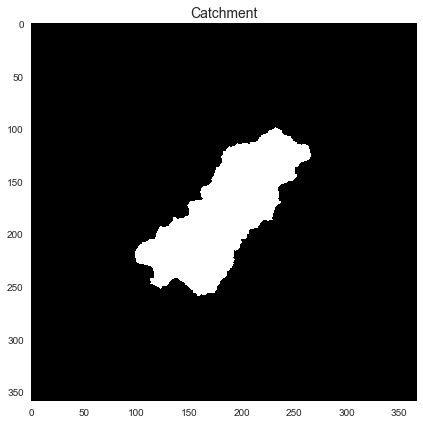
# Get the current view and plot
->>> catch = grid.view('catch')
->>> plt.imshow(catch)
+catch_view = grid.view(catch)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.imshow(catch_view, cmap='Greys_r', zorder=1)
+plt.title('Catchment', size=14)
+plt.tight_layout()
+```
+
+
+
+
+
+
+
+Note that in this case, the original raster and its view are the same:
+
+```python
+(catch == catch_view).all()
+```
+
+
+Output...
+
+
+```
+True
```
-
+
+
+
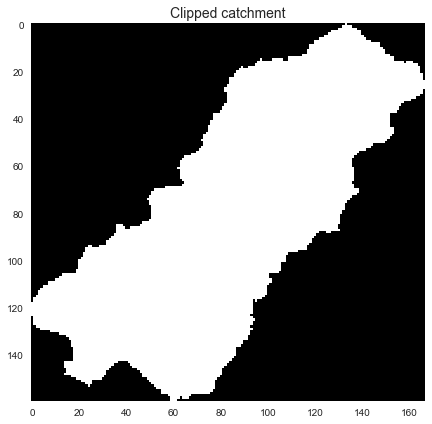
## Clipping the view to a dataset
@@ -75,14 +216,54 @@ The `grid.clip_to` method clips the grid's current view to nonzero elements in a
```python
# Clip the grid's view to the catchment dataset
->>> grid.clip_to('catch')
+grid.clip_to(catch)
# Get the current view and plot
->>> catch = grid.view('catch')
->>> plt.imshow(catch)
+catch_view = grid.view(catch)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.imshow(catch_view, cmap='Greys_r', zorder=1)
+plt.title('Clipped catchment', size=14)
+plt.tight_layout()
+```
+
+
+
+
+
+
+
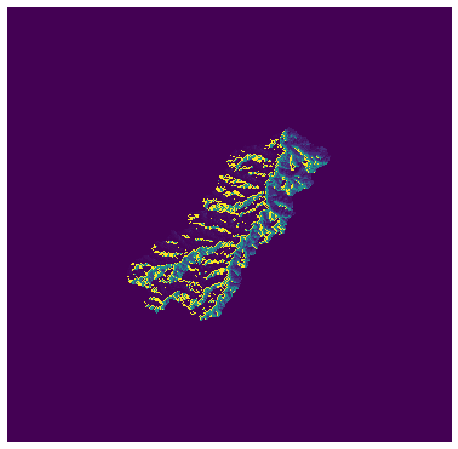
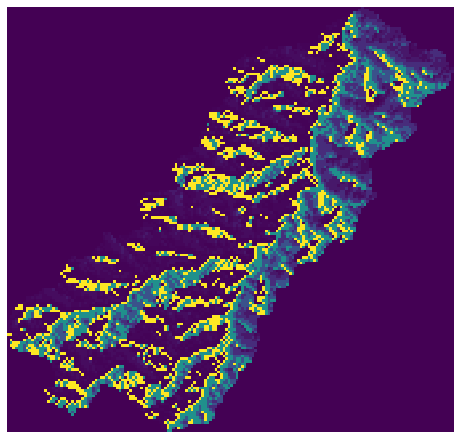
+We can also now use the `view` method to view other datasets within the current catchment boundaries:
+
+```python
+# Get the current view of flow directions
+fdir_view = grid.view(fdir)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.imshow(fdir_view, cmap='viridis', zorder=1)
+plt.title('Clipped flow directions', size=14)
+plt.tight_layout()
```
-
+
+
+
+
+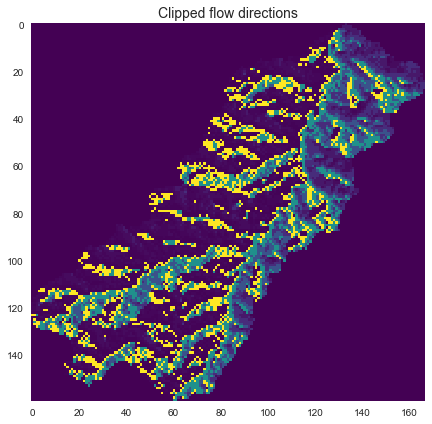
## Tweaking the view using keyword arguments
@@ -91,80 +272,140 @@ The `grid.clip_to` method clips the grid's current view to nonzero elements in a
The "no data" value in the output array can be specified using the `nodata` keyword argument. This is often useful for visualization.
```python
->>> catch = grid.view('dem', nodata=np.nan)
->>> plt.imshow(catch)
+dem_view = grid.view(dem, nodata=np.nan)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.imshow(dem_view, cmap='terrain', zorder=1)
+plt.title('Clipped DEM with mask', size=14)
+plt.tight_layout()
```
-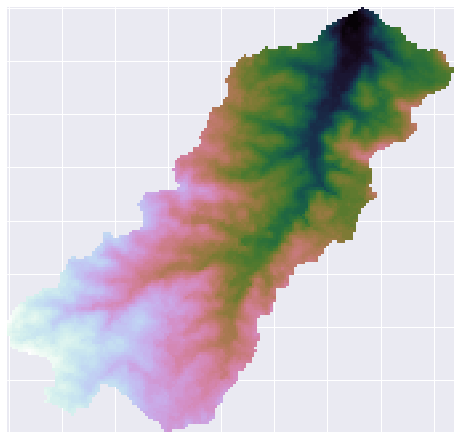
+
+
+
+
+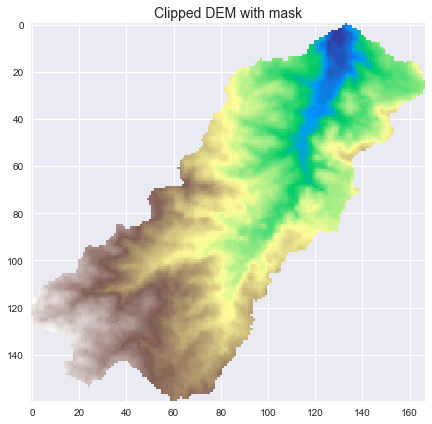
### Toggling the mask
-The mask can be turned off by setting `apply_mask=False`.
+The mask can be turned off by setting `apply_output_mask=False`.
+
+```python
+dem_view = grid.view(dem, nodata=np.nan,
+ apply_output_mask=False)
+```
+
+
+Plotting code...
+
```python
->>> catch = grid.view('dem', nodata=np.nan,
- apply_mask=False)
->>> plt.imshow(catch)
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.imshow(dem_view, cmap='terrain', zorder=1)
+plt.title('Clipped DEM without mask', size=14)
+plt.tight_layout()
```
-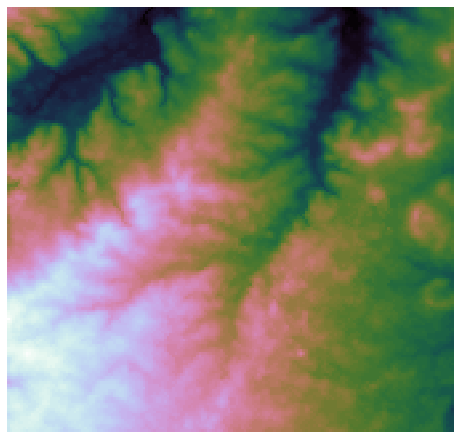
+
+
+
+
+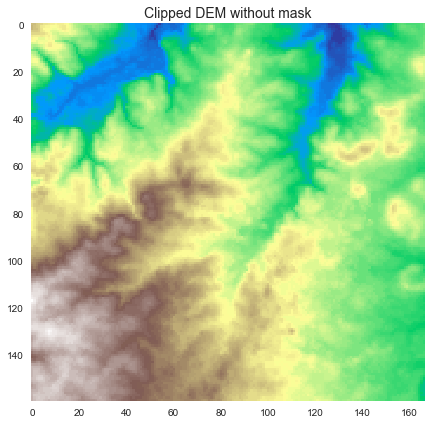
### Setting the interpolation method
By default, the view method uses a nearest neighbors approach for interpolation. However, this can be changed using the `interpolation` keyword argument.
```python
->>> nn_interpolation = grid.view('terrain',
- nodata=np.nan)
->>> plt.imshow(nn_interpolation)
+# Load a dataset with a different spatial reference system
+terrain = grid.read_raster('./data/impervious_area.tiff', window=grid.bbox,
+ window_crs=grid.crs)
+```
+
+#### Nearest neighbor interpolation
+
+```python
+# View the new dataset with nearest neighbor interpolation
+nn_interpolation = grid.view(terrain, nodata=np.nan)
```
-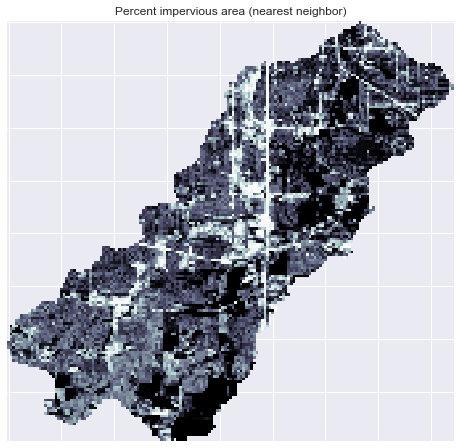
+
+Plotting code...
+
```python
->>> linear_interpolation = grid.view('terrain',
- interpolation='linear',
- nodata=np.nan)
->>> plt.imshow(linear_interpolation)
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.imshow(nn_interpolation, cmap='bone', zorder=1)
+plt.title('Nearest neighbor interpolation', size=14)
+plt.tight_layout()
```
-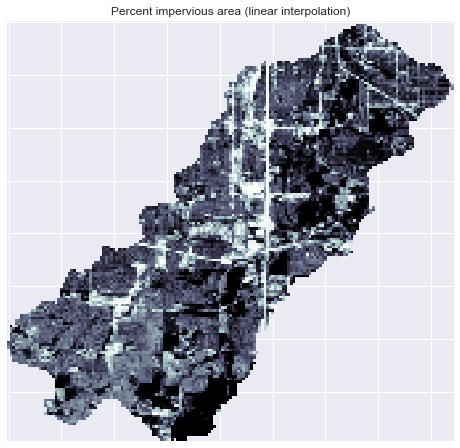
+
+
+
-## Clipping the view to a bounding box
+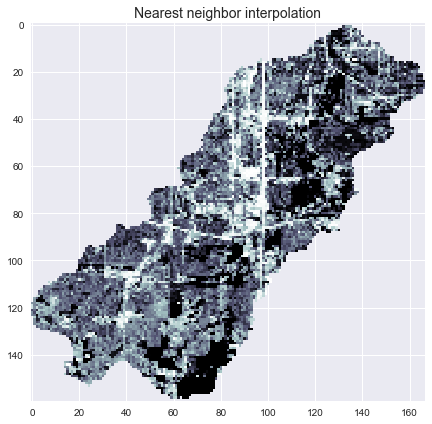
-The grid's view can be set to a rectangular bounding box using the `grid.set_bbox` method.
+#### Linear interpolation
```python
-# Specify new bbox as upper-right quadrant of old bbox
->>> new_xmin = (grid.bbox[2] + grid.bbox[0]) / 2
->>> new_ymin = (grid.bbox[3] + grid.bbox[1]) / 2
->>> new_xmax = grid.bbox[2]
->>> new_ymax = grid.bbox[3]
->>> new_bbox = (new_xmin, new_ymin, new_xmax, new_ymax)
+# View the new dataset with linear interpolation
+lin_interpolation = grid.view(terrain, nodata=np.nan, interpolation='linear')
+```
-# Set new bbox
->>> grid.set_bbox(new_bbox)
+
+Plotting code...
+
-# Plot the new view
->>> plt.imshow(grid.view('catch'))
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.imshow(lin_interpolation, cmap='bone', zorder=1)
+plt.title('Linear interpolation', size=14)
+plt.tight_layout()
```
-
+
+
+
+
## Setting the view manually
-The `grid.affine`, `grid.crs`, `grid.shape` and `grid.mask` attributes can also be set manually.
+The `grid.viewfinder` attribute can also be set manually.
```python
# Reset the view to the dataset's original view
->>> grid.affine = grid.dem.affine
->>> grid.crs = grid.dem.crs
->>> grid.shape = grid.dem.shape
->>> grid.mask = grid.dem.mask
+grid.viewfinder = dem.viewfinder
# Plot the new view
->>> plt.imshow(grid.view('catch'))
+dem_view = grid.view(dem)
+```
+
+
+Plotting code...
+
+
+```python
+fig, ax = plt.subplots(figsize=(8,6))
+fig.patch.set_alpha(0)
+plt.imshow(dem_view, cmap='terrain', zorder=1)
+plt.title('DEM with original view restored', size=14)
+plt.tight_layout()
```
-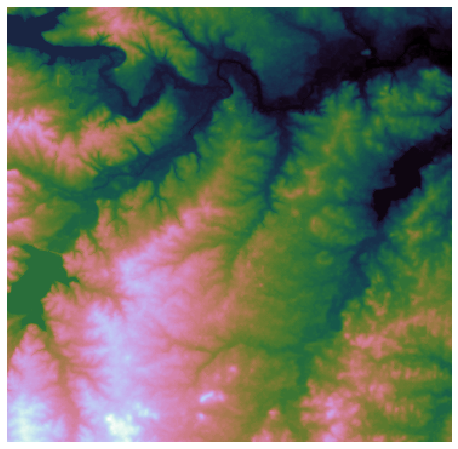
+
+
+
+
+
diff --git a/pysheds/_sgrid.py b/pysheds/_sgrid.py
new file mode 100644
index 0000000..e096b5e
--- /dev/null
+++ b/pysheds/_sgrid.py
@@ -0,0 +1,1177 @@
+import numpy as np
+from numba import njit, prange
+from numba.types import float64, int64, uint32, uint16, uint8, boolean, UniTuple, Tuple, List, void
+
+# Functions for 'flowdir'
+
+@njit(int64[:,:](float64[:,:], float64, float64, UniTuple(int64, 8), boolean[:,:],
+ int64, int64, int64),
+ parallel=True,
+ cache=True)
+def _d8_flowdir_numba(dem, dx, dy, dirmap, nodata_cells, nodata_out, flat=-1, pit=-2):
+ fdir = np.zeros(dem.shape, dtype=np.int64)
+ m, n = dem.shape
+ dd = np.sqrt(dx**2 + dy**2)
+ row_offsets = np.array([-1, -1, 0, 1, 1, 1, 0, -1])
+ col_offsets = np.array([0, 1, 1, 1, 0, -1, -1, -1])
+ distances = np.array([dy, dd, dx, dd, dy, dd, dx, dd])
+ for i in prange(1, m - 1):
+ for j in prange(1, n - 1):
+ if nodata_cells[i, j]:
+ fdir[i, j] = nodata_out
+ else:
+ elev = dem[i, j]
+ max_slope = -np.inf
+ for k in range(8):
+ row_offset = row_offsets[k]
+ col_offset = col_offsets[k]
+ distance = distances[k]
+ slope = (elev - dem[i + row_offset, j + col_offset]) / distance
+ if slope > max_slope:
+ fdir[i, j] = dirmap[k]
+ max_slope = slope
+ if max_slope == 0:
+ fdir[i, j] = flat
+ elif max_slope < 0:
+ fdir[i, j] = pit
+ return fdir
+
+@njit(int64[:,:](float64[:,:], float64[:,:], float64[:,:], UniTuple(int64, 8), boolean[:,:],
+ int64, int64, int64),
+ parallel=True,
+ cache=True)
+def _d8_flowdir_irregular_numba(dem, x_arr, y_arr, dirmap, nodata_cells,
+ nodata_out, flat=-1, pit=-2):
+ fdir = np.zeros(dem.shape, dtype=np.int64)
+ m, n = dem.shape
+ row_offsets = np.array([-1, -1, 0, 1, 1, 1, 0, -1])
+ col_offsets = np.array([0, 1, 1, 1, 0, -1, -1, -1])
+ for i in prange(1, m - 1):
+ for j in prange(1, n - 1):
+ if nodata_cells[i, j]:
+ fdir[i, j] = nodata_out
+ else:
+ elev = dem[i, j]
+ x_center = x_arr[i, j]
+ y_center = y_arr[i, j]
+ max_slope = -np.inf
+ for k in range(8):
+ row_offset = row_offsets[k]
+ col_offset = col_offsets[k]
+ dh = elev - dem[i + row_offset, j + col_offset]
+ dx = np.abs(x_center - x_arr[i + row_offset, j + col_offset])
+ dy = np.abs(y_center - y_arr[i + row_offset, j + col_offset])
+ distance = np.sqrt(dx**2 + dy**2)
+ slope = dh / distance
+ if slope > max_slope:
+ fdir[i, j] = dirmap[k]
+ max_slope = slope
+ if max_slope == 0:
+ fdir[i, j] = flat
+ elif max_slope < 0:
+ fdir[i, j] = pit
+ return fdir
+
+@njit(UniTuple(float64, 2)(float64, float64, float64, float64, float64),
+ cache=True)
+def _facet_flow(e0, e1, e2, d1=1., d2=1.):
+ s1 = (e0 - e1) / d1
+ s2 = (e1 - e2) / d2
+ r = np.arctan2(s2, s1)
+ s = np.hypot(s1, s2)
+ diag_angle = np.arctan2(d2, d1)
+ diag_distance = np.hypot(d1, d2)
+ b0 = (r < 0)
+ b1 = (r > diag_angle)
+ if b0:
+ r = 0
+ s = s1
+ if b1:
+ r = diag_angle
+ s = (e0 - e2) / diag_distance
+ return r, s
+
+@njit(float64[:,:](float64[:,:], float64, float64, float64, float64, float64),
+ parallel=True,
+ cache=True)
+def _dinf_flowdir_numba(dem, x_dist, y_dist, nodata, flat=-1., pit=-2.):
+ m, n = dem.shape
+ e1s = np.array([0, 2, 2, 4, 4, 6, 6, 0])
+ e2s = np.array([1, 1, 3, 3, 5, 5, 7, 7])
+ d1s = np.array([0, 2, 2, 4, 4, 6, 6, 0])
+ d2s = np.array([2, 0, 4, 2, 6, 4, 0, 6])
+ ac = np.array([0, 1, 1, 2, 2, 3, 3, 4])
+ af = np.array([1, -1, 1, -1, 1, -1, 1, -1])
+ angle = np.full(dem.shape, nodata, dtype=np.float64)
+ diag_dist = np.sqrt(x_dist**2 + y_dist**2)
+ cell_dists = np.array([x_dist, diag_dist, y_dist, diag_dist,
+ x_dist, diag_dist, y_dist, diag_dist])
+ row_offsets = np.array([0, -1, -1, -1, 0, 1, 1, 1])
+ col_offsets = np.array([1, 1, 0, -1, -1, -1, 0, 1])
+ for i in prange(1, m - 1):
+ for j in prange(1, n - 1):
+ e0 = dem[i, j]
+ s_max = -np.inf
+ k_max = 8
+ r_max = 0.
+ for k in prange(8):
+ edge_1 = e1s[k]
+ edge_2 = e2s[k]
+ row_offset_1 = row_offsets[edge_1]
+ row_offset_2 = row_offsets[edge_2]
+ col_offset_1 = col_offsets[edge_1]
+ col_offset_2 = col_offsets[edge_2]
+ e1 = dem[i + row_offset_1, j + col_offset_1]
+ e2 = dem[i + row_offset_2, j + col_offset_2]
+ distance_1 = d1s[k]
+ distance_2 = d2s[k]
+ d1 = cell_dists[distance_1]
+ d2 = cell_dists[distance_2]
+ r, s = _facet_flow(e0, e1, e2, d1, d2)
+ if s > s_max:
+ s_max = s
+ k_max = k
+ r_max = r
+ if s_max < 0:
+ angle[i, j] = pit
+ elif s_max == 0:
+ angle[i, j] = flat
+ else:
+ flow_angle = (af[k_max] * r_max) + (ac[k_max] * np.pi / 2)
+ flow_angle = flow_angle % (2 * np.pi)
+ angle[i, j] = flow_angle
+ return angle
+
+@njit(float64[:,:](float64[:,:], float64[:,:], float64[:,:], float64, float64, float64),
+ parallel=True,
+ cache=True)
+def _dinf_flowdir_irregular_numba(dem, x_arr, y_arr, nodata, flat=-1., pit=-2.):
+ m, n = dem.shape
+ e1s = np.array([0, 2, 2, 4, 4, 6, 6, 0])
+ e2s = np.array([1, 1, 3, 3, 5, 5, 7, 7])
+ d1s = np.array([0, 2, 2, 4, 4, 6, 6, 0])
+ d2s = np.array([2, 0, 4, 2, 6, 4, 0, 6])
+ ac = np.array([0, 1, 1, 2, 2, 3, 3, 4])
+ af = np.array([1, -1, 1, -1, 1, -1, 1, -1])
+ angle = np.full(dem.shape, nodata, dtype=np.float64)
+ row_offsets = np.array([0, -1, -1, -1, 0, 1, 1, 1])
+ col_offsets = np.array([1, 1, 0, -1, -1, -1, 0, 1])
+ for i in prange(1, m - 1):
+ for j in prange(1, n - 1):
+ e0 = dem[i, j]
+ x0 = x_arr[i, j]
+ y0 = y_arr[i, j]
+ s_max = -np.inf
+ k_max = 8
+ r_max = 0.
+ for k in prange(8):
+ edge_1 = e1s[k]
+ edge_2 = e2s[k]
+ row_offset_1 = row_offsets[edge_1]
+ row_offset_2 = row_offsets[edge_2]
+ col_offset_1 = col_offsets[edge_1]
+ col_offset_2 = col_offsets[edge_2]
+ e1 = dem[i + row_offset_1, j + col_offset_1]
+ e2 = dem[i + row_offset_2, j + col_offset_2]
+ x1 = x_arr[i + row_offset_1, j + col_offset_1]
+ x2 = x_arr[i + row_offset_2, j + col_offset_2]
+ y1 = y_arr[i + row_offset_1, j + col_offset_1]
+ y2 = y_arr[i + row_offset_2, j + col_offset_2]
+ d1 = np.sqrt(x1**2 + y1**2)
+ d2 = np.sqrt(x2**2 + y2**2)
+ r, s = _facet_flow(e0, e1, e2, d1, d2)
+ if s > s_max:
+ s_max = s
+ k_max = k
+ r_max = r
+ if s_max < 0:
+ angle[i, j] = pit
+ elif s_max == 0:
+ angle[i, j] = flat
+ else:
+ flow_angle = (af[k_max] * r_max) + (ac[k_max] * np.pi / 2)
+ flow_angle = flow_angle % (2 * np.pi)
+ angle[i, j] = flow_angle
+ return angle
+
+@njit(Tuple((int64[:,:], int64[:,:], float64[:,:], float64[:,:]))
+ (float64[:,:], UniTuple(int64, 8), boolean[:,:]),
+ parallel=True,
+ cache=True)
+def _angle_to_d8_numba(angles, dirmap, nodata_cells):
+ n = angles.size
+ min_angle = 0.
+ max_angle = 2 * np.pi
+ mod = np.pi / 4
+ c0_order = np.array([2, 1, 0, 7, 6, 5, 4, 3])
+ c1_order = np.array([1, 0, 7, 6, 5, 4, 3, 2])
+ c0 = np.zeros(8, dtype=np.uint8)
+ c1 = np.zeros(8, dtype=np.uint8)
+ # Need to watch typing of fdir_0 and fdir_1
+ fdirs_0 = np.zeros(angles.shape, dtype=np.int64)
+ fdirs_1 = np.zeros(angles.shape, dtype=np.int64)
+ props_0 = np.zeros(angles.shape, dtype=np.float64)
+ props_1 = np.zeros(angles.shape, dtype=np.float64)
+ for i in range(8):
+ c0[i] = dirmap[c0_order[i]]
+ c1[i] = dirmap[c1_order[i]]
+ for i in prange(n):
+ angle = angles.flat[i]
+ nodata = nodata_cells.flat[i]
+ if np.isnan(angle) or nodata:
+ zfloor = 8
+ prop_0 = 0
+ prop_1 = 0
+ fdir_0 = 0
+ fdir_1 = 0
+ elif (angle < min_angle) or (angle > max_angle):
+ zfloor = 8
+ prop_0 = 0
+ prop_1 = 0
+ fdir_0 = 0
+ fdir_1 = 0
+ else:
+ zmod = angle % mod
+ zfloor = int(angle // mod)
+ prop_1 = (zmod / mod)
+ prop_0 = 1 - prop_1
+ fdir_0 = c0[zfloor]
+ fdir_1 = c1[zfloor]
+ # Handle case where flow proportion is zero in either direction
+ if (prop_0 == 0):
+ fdir_0 = fdir_1
+ prop_0 = 0.5
+ prop_1 = 0.5
+ elif (prop_1 == 0):
+ fdir_1 = fdir_0
+ prop_0 = 0.5
+ prop_1 = 0.5
+ fdirs_0.flat[i] = fdir_0
+ fdirs_1.flat[i] = fdir_1
+ props_0.flat[i] = prop_0
+ props_1.flat[i] = prop_1
+ return fdirs_0, fdirs_1, props_0, props_1
+
+# Functions for 'catchment'
+
+@njit(void(int64, boolean[:,:], int64[:,:], int64[:], int64[:]),
+ cache=True)
+def _d8_catchment_recursion(ix, catch, fdir, offsets, r_dirmap):
+ visited = catch.flat[ix]
+ if not visited:
+ catch.flat[ix] = True
+ neighbors = offsets + ix
+ for k in range(8):
+ neighbor = neighbors[k]
+ points_to = (fdir.flat[neighbor] == r_dirmap[k])
+ if points_to:
+ _d8_catchment_recursion(neighbor, catch, fdir, offsets, r_dirmap)
+
+@njit(boolean[:,:](int64[:,:], UniTuple(int64, 2), UniTuple(int64, 8)),
+ cache=True)
+def _d8_catchment_numba(fdir, pour_point, dirmap):
+ catch = np.zeros(fdir.shape, dtype=np.bool8)
+ offset = fdir.shape[1]
+ i, j = pour_point
+ ix = (i * offset) + j
+ offsets = np.array([-offset, 1 - offset, 1, 1 + offset,
+ offset, - 1 + offset, - 1, - 1 - offset])
+ r_dirmap = np.array([dirmap[4], dirmap[5], dirmap[6],
+ dirmap[7], dirmap[0], dirmap[1],
+ dirmap[2], dirmap[3]])
+ _d8_catchment_recursion(ix, catch, fdir, offsets, r_dirmap)
+ return catch
+
+@njit(void(int64, boolean[:,:], int64[:,:], int64[:,:], int64[:], int64[:]),
+ cache=True)
+def _dinf_catchment_recursion(ix, catch, fdir_0, fdir_1, offsets, r_dirmap):
+ visited = catch.flat[ix]
+ if not visited:
+ catch.flat[ix] = True
+ neighbors = offsets + ix
+ for k in range(8):
+ neighbor = neighbors[k]
+ points_to_0 = (fdir_0.flat[neighbor] == r_dirmap[k])
+ points_to_1 = (fdir_1.flat[neighbor] == r_dirmap[k])
+ points_to = points_to_0 or points_to_1
+ if points_to:
+ _dinf_catchment_recursion(neighbor, catch, fdir_0, fdir_1, offsets, r_dirmap)
+
+@njit(boolean[:,:](int64[:,:], int64[:,:], UniTuple(int64, 2), UniTuple(int64, 8)),
+ cache=True)
+def _dinf_catchment_numba(fdir_0, fdir_1, pour_point, dirmap):
+ catch = np.zeros(fdir_0.shape, dtype=np.bool8)
+ dirmap = np.array(dirmap)
+ offset = fdir_0.shape[1]
+ i, j = pour_point
+ ix = (i * offset) + j
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ r_dirmap = np.array([dirmap[4], dirmap[5], dirmap[6],
+ dirmap[7], dirmap[0], dirmap[1],
+ dirmap[2], dirmap[3]])
+ _dinf_catchment_recursion(ix, catch, fdir_0, fdir_1, offsets, r_dirmap)
+ return catch
+
+# Functions for 'accumulation'
+
+@njit(void(int64, int64, float64[:,:], int64[:,:], uint8[:]),
+ cache=True)
+def _d8_accumulation_recursion(startnode, endnode, acc, fdir, indegree):
+ acc.flat[endnode] += acc.flat[startnode]
+ indegree[endnode] -= 1
+ if (indegree[endnode] == 0):
+ new_startnode = endnode
+ new_endnode = fdir.flat[endnode]
+ _d8_accumulation_recursion(new_startnode, new_endnode, acc, fdir, indegree)
+
+@njit(float64[:,:](float64[:,:], int64[:,:], uint8[:], int64[:]),
+ cache=True)
+def _d8_accumulation_numba(acc, fdir, indegree, startnodes):
+ n = startnodes.size
+ for k in range(n):
+ startnode = startnodes[k]
+ endnode = fdir.flat[startnode]
+ _d8_accumulation_recursion(startnode, endnode, acc, fdir, indegree)
+ return acc
+
+@njit(void(int64, int64, float64[:,:], int64[:,:], uint8[:], float64[:,:]),
+ cache=True)
+def _d8_accumulation_eff_recursion(startnode, endnode, acc, fdir, indegree, eff):
+ acc.flat[endnode] += (acc.flat[startnode] * eff.flat[startnode])
+ indegree[endnode] -= 1
+ if (indegree[endnode] == 0):
+ new_startnode = endnode
+ new_endnode = fdir.flat[endnode]
+ _d8_accumulation_eff_recursion(new_startnode, new_endnode, acc, fdir, indegree, eff)
+
+@njit(float64[:,:](float64[:,:], int64[:,:], uint8[:], int64[:], float64[:,:]),
+ cache=True)
+def _d8_accumulation_eff_numba(acc, fdir, indegree, startnodes, eff):
+ n = startnodes.size
+ for k in range(n):
+ startnode = startnodes[k]
+ endnode = fdir.flat[startnode]
+ _d8_accumulation_eff_recursion(startnode, endnode, acc, fdir, indegree, eff)
+ return acc
+
+@njit(void(int64, int64, float64[:,:], int64[:,:], int64[:,:], uint8[:], float64,
+ boolean[:,:], float64[:,:], float64[:,:]),
+ cache=True)
+def _dinf_accumulation_recursion(startnode, endnode, acc, fdir_0, fdir_1,
+ indegree, prop, visited, props_0, props_1):
+ acc.flat[endnode] += (prop * acc.flat[startnode])
+ indegree.flat[endnode] -= 1
+ visited.flat[startnode] = True
+ if (indegree.flat[endnode] == 0):
+ new_startnode = endnode
+ new_endnode_0 = fdir_0.flat[new_startnode]
+ new_endnode_1 = fdir_1.flat[new_startnode]
+ prop_0 = props_0.flat[new_startnode]
+ prop_1 = props_1.flat[new_startnode]
+ _dinf_accumulation_recursion(new_startnode, new_endnode_0, acc, fdir_0, fdir_1,
+ indegree, prop_0, visited, props_0, props_1)
+ _dinf_accumulation_recursion(new_startnode, new_endnode_1, acc, fdir_0, fdir_1,
+ indegree, prop_1, visited, props_0, props_1)
+
+@njit(float64[:,:](float64[:,:], int64[:,:], int64[:,:], uint8[:], int64[:],
+ float64[:,:], float64[:,:]),
+ cache=True)
+def _dinf_accumulation_numba(acc, fdir_0, fdir_1, indegree, startnodes,
+ props_0, props_1):
+ n = startnodes.size
+ visited = np.zeros(acc.shape, dtype=np.bool8)
+ for k in range(n):
+ startnode = startnodes.flat[k]
+ endnode_0 = fdir_0.flat[startnode]
+ endnode_1 = fdir_1.flat[startnode]
+ prop_0 = props_0.flat[startnode]
+ prop_1 = props_1.flat[startnode]
+ _dinf_accumulation_recursion(startnode, endnode_0, acc, fdir_0, fdir_1,
+ indegree, prop_0, visited, props_0, props_1)
+ _dinf_accumulation_recursion(startnode, endnode_1, acc, fdir_0, fdir_1,
+ indegree, prop_1, visited, props_0, props_1)
+ # TODO: Needed?
+ visited.flat[startnode] = True
+ return acc
+
+@njit(void(int64, int64, float64[:,:], int64[:,:], int64[:,:], uint8[:], float64,
+ boolean[:,:], float64[:,:], float64[:,:], float64[:,:]),
+ cache=True)
+def _dinf_accumulation_eff_recursion(startnode, endnode, acc, fdir_0, fdir_1,
+ indegree, prop, visited, props_0, props_1, eff):
+ acc.flat[endnode] += (prop * acc.flat[startnode] * eff.flat[startnode])
+ indegree.flat[endnode] -= 1
+ visited.flat[startnode] = True
+ if (indegree.flat[endnode] == 0):
+ new_startnode = endnode
+ new_endnode_0 = fdir_0.flat[new_startnode]
+ new_endnode_1 = fdir_1.flat[new_startnode]
+ prop_0 = props_0.flat[new_startnode]
+ prop_1 = props_1.flat[new_startnode]
+ _dinf_accumulation_eff_recursion(new_startnode, new_endnode_0, acc, fdir_0, fdir_1,
+ indegree, prop_0, visited, props_0, props_1, eff)
+ _dinf_accumulation_eff_recursion(new_startnode, new_endnode_1, acc, fdir_0, fdir_1,
+ indegree, prop_1, visited, props_0, props_1, eff)
+
+@njit(float64[:,:](float64[:,:], int64[:,:], int64[:,:], uint8[:], int64[:],
+ float64[:,:], float64[:,:], float64[:,:]),
+ cache=True)
+def _dinf_accumulation_eff_numba(acc, fdir_0, fdir_1, indegree, startnodes,
+ props_0, props_1, eff):
+ n = startnodes.size
+ visited = np.zeros(acc.shape, dtype=np.bool8)
+ for k in range(n):
+ startnode = startnodes.flat[k]
+ endnode_0 = fdir_0.flat[startnode]
+ endnode_1 = fdir_1.flat[startnode]
+ prop_0 = props_0.flat[startnode]
+ prop_1 = props_1.flat[startnode]
+ _dinf_accumulation_eff_recursion(startnode, endnode_0, acc, fdir_0, fdir_1,
+ indegree, prop_0, visited, props_0, props_1, eff)
+ _dinf_accumulation_eff_recursion(startnode, endnode_1, acc, fdir_0, fdir_1,
+ indegree, prop_1, visited, props_0, props_1, eff)
+ # TODO: Needed?
+ visited.flat[startnode] = True
+ return acc
+
+# Functions for 'flow_distance'
+
+@njit(void(int64, int64[:,:], boolean[:,:], float64[:,:], float64[:,:],
+ int64[:], float64, int64[:]),
+ cache=True)
+def _d8_flow_distance_recursion(ix, fdir, visits, dist, weights, r_dirmap,
+ inc, offsets):
+ visited = visits.flat[ix]
+ if not visited:
+ visits.flat[ix] = True
+ dist.flat[ix] = inc
+ neighbors = offsets + ix
+ for k in range(8):
+ neighbor = neighbors[k]
+ points_to = (fdir.flat[neighbor] == r_dirmap[k])
+ if points_to:
+ next_inc = inc + weights.flat[neighbor]
+ _d8_flow_distance_recursion(neighbor, fdir, visits, dist, weights,
+ r_dirmap, next_inc, offsets)
+
+@njit(float64[:,:](int64[:,:], float64[:,:], UniTuple(int64, 2), UniTuple(int64, 8)),
+ cache=True)
+def _d8_flow_distance_numba(fdir, weights, pour_point, dirmap):
+ visits = np.zeros(fdir.shape, dtype=np.bool8)
+ dist = np.full(fdir.shape, np.inf, dtype=np.float64)
+ r_dirmap = np.array([dirmap[4], dirmap[5], dirmap[6],
+ dirmap[7], dirmap[0], dirmap[1],
+ dirmap[2], dirmap[3]])
+ m, n = fdir.shape
+ offsets = np.array([-n, 1 - n, 1,
+ 1 + n, n, - 1 + n,
+ - 1, - 1 - n])
+ i, j = pour_point
+ ix = (i * n) + j
+ _d8_flow_distance_recursion(ix, fdir, visits, dist, weights,
+ r_dirmap, 0., offsets)
+ return dist
+
+@njit(void(int64, int64[:,:], int64[:,:], boolean[:,:], float64[:,:],
+ float64[:,:], float64[:,:], int64[:], float64, int64[:]),
+ cache=True)
+def _dinf_flow_distance_recursion(ix, fdir_0, fdir_1, visits, dist,
+ weights_0, weights_1, r_dirmap, inc, offsets):
+ current_dist = dist.flat[ix]
+ if (inc < current_dist):
+ dist.flat[ix] = inc
+ neighbors = offsets + ix
+ for k in range(8):
+ neighbor = neighbors[k]
+ points_to_0 = (fdir_0.flat[neighbor] == r_dirmap[k])
+ points_to_1 = (fdir_1.flat[neighbor] == r_dirmap[k])
+ if points_to_0:
+ next_inc = inc + weights_0.flat[neighbor]
+ _dinf_flow_distance_recursion(neighbor, fdir_0, fdir_1, visits, dist,
+ weights_0, weights_1, r_dirmap, next_inc,
+ offsets)
+ elif points_to_1:
+ next_inc = inc + weights_1.flat[neighbor]
+ _dinf_flow_distance_recursion(neighbor, fdir_0, fdir_1, visits, dist,
+ weights_0, weights_1, r_dirmap, next_inc,
+ offsets)
+
+@njit(float64[:,:](int64[:,:], int64[:,:], float64[:,:], float64[:,:],
+ UniTuple(int64, 2), UniTuple(int64, 8)),
+ cache=True)
+def _dinf_flow_distance_numba(fdir_0, fdir_1, weights_0, weights_1,
+ pour_point, dirmap):
+ visits = np.zeros(fdir_0.shape, dtype=np.bool8)
+ dist = np.full(fdir_0.shape, np.inf, dtype=np.float64)
+ r_dirmap = np.array([dirmap[4], dirmap[5], dirmap[6],
+ dirmap[7], dirmap[0], dirmap[1],
+ dirmap[2], dirmap[3]])
+ m, n = fdir_0.shape
+ offsets = np.array([-n, 1 - n, 1,
+ 1 + n, n, - 1 + n,
+ - 1, - 1 - n])
+ i, j = pour_point
+ ix = (i * n) + j
+ _dinf_flow_distance_recursion(ix, fdir_0, fdir_1, visits, dist,
+ weights_0, weights_1, r_dirmap, 0., offsets)
+ return dist
+
+@njit(void(int64, int64, int64[:,:], int64[:,:], float64[:,:],
+ int64[:,:], uint8[:], float64[:,:]),
+ cache=True)
+def _d8_reverse_distance_recursion(startnode, endnode, min_order, max_order,
+ rdist, fdir, indegree, weights):
+ min_order.flat[endnode] = min(min_order.flat[endnode], rdist.flat[startnode])
+ max_order.flat[endnode] = max(max_order.flat[endnode], rdist.flat[startnode])
+ indegree.flat[endnode] -= 1
+ if indegree.flat[endnode] == 0:
+ rdist.flat[endnode] = max_order.flat[endnode] + weights.flat[endnode]
+ new_startnode = endnode
+ new_endnode = fdir.flat[new_startnode]
+ _d8_reverse_distance_recursion(new_startnode, new_endnode, min_order,
+ max_order, rdist, fdir, indegree, weights)
+
+@njit(float64[:,:](int64[:,:], int64[:,:], float64[:,:], int64[:,:],
+ uint8[:], int64[:], float64[:,:]),
+ cache=True)
+def _d8_reverse_distance_numba(min_order, max_order, rdist, fdir,
+ indegree, startnodes, weights):
+ n = startnodes.size
+ for k in range(n):
+ startnode = startnodes.flat[k]
+ endnode = fdir.flat[startnode]
+ _d8_reverse_distance_recursion(startnode, endnode, min_order, max_order,
+ rdist, fdir, indegree, weights)
+ return rdist
+
+# Functions for 'resolve_flats'
+
+@njit(UniTuple(boolean[:,:], 3)(float64[:,:], int64[:]),
+ parallel=True,
+ cache=True)
+def _par_get_candidates_numba(dem, inside):
+ n = inside.size
+ offset = dem.shape[1]
+ fdirs_defined = np.zeros(dem.shape, dtype=np.bool8)
+ flats = np.zeros(dem.shape, dtype=np.bool8)
+ higher_cells = np.zeros(dem.shape, dtype=np.bool8)
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ for i in prange(n):
+ k = inside[i]
+ inner_neighbors = (k + offsets)
+ fdir_defined = False
+ is_pit = True
+ higher_cell = False
+ same_elev_cell = False
+ for j in prange(8):
+ neighbor = inner_neighbors[j]
+ diff = dem.flat[k] - dem.flat[neighbor]
+ fdir_defined |= (diff > 0)
+ is_pit &= (diff < 0)
+ higher_cell |= (diff < 0)
+ is_flat = (~fdir_defined & ~is_pit)
+ fdirs_defined.flat[k] = fdir_defined
+ flats.flat[k] = is_flat
+ higher_cells.flat[k] = higher_cell
+ fdirs_defined[0, :] = True
+ fdirs_defined[:, 0] = True
+ fdirs_defined[-1, :] = True
+ fdirs_defined[:, -1] = True
+ return flats, fdirs_defined, higher_cells
+
+@njit(uint32[:,:](int64[:], boolean[:,:], boolean[:,:], int64[:,:]),
+ parallel=True,
+ cache=True)
+def _par_get_high_edge_cells_numba(inside, fdirs_defined, higher_cells, labels):
+ n = inside.size
+ high_edge_cells = np.zeros(fdirs_defined.shape, dtype=np.uint32)
+ for i in range(n):
+ k = inside[i]
+ fdir_defined = fdirs_defined.flat[k]
+ higher_cell = higher_cells.flat[k]
+ # Find high-edge cells
+ is_high_edge_cell = (~fdir_defined & higher_cell)
+ if is_high_edge_cell:
+ high_edge_cells.flat[k] = labels.flat[k]
+ return high_edge_cells
+
+@njit(uint32[:,:](int64[:], float64[:,:], boolean[:,:], int64[:,:], int64),
+ parallel=True,
+ cache=True)
+def _par_get_low_edge_cells_numba(inside, dem, fdirs_defined, labels, numlabels):
+ n = inside.size
+ offset = dem.shape[1]
+ low_edge_cells = np.zeros(dem.shape, dtype=np.uint32)
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ for i in prange(n):
+ k = inside[i]
+ # Find low-edge cells
+ inner_neighbors = (k + offsets)
+ fdir_defined = fdirs_defined.flat[k]
+ if (~fdir_defined):
+ for j in range(8):
+ neighbor = inner_neighbors[j]
+ diff = dem.flat[k] - dem.flat[neighbor]
+ is_same_elev = (diff == 0)
+ neighbor_direction_defined = (fdirs_defined.flat[neighbor])
+ neighbor_is_low_edge_cell = (is_same_elev) & (neighbor_direction_defined)
+ if neighbor_is_low_edge_cell:
+ label = labels.flat[k]
+ low_edge_cells.flat[neighbor] = label
+ return low_edge_cells
+
+@njit(uint16[:,:](uint32[:,:], boolean[:,:], int64[:,:], int64, int64),
+ cache=True)
+def _grad_from_higher_numba(hec, flats, labels, numlabels, max_iter=1000):
+ offset = flats.shape[1]
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ z = np.zeros(flats.shape, dtype=np.uint16)
+ n = z.size
+ cur_queue = []
+ next_queue = []
+ # Increment gradient
+ for i in range(n):
+ if hec.flat[i]:
+ z.flat[i] = 1
+ cur_queue.append(i)
+ for i in range(2, max_iter + 1):
+ if not cur_queue:
+ break
+ while cur_queue:
+ k = cur_queue.pop()
+ neighbors = offsets + k
+ for j in range(8):
+ neighbor = neighbors[j]
+ if (flats.flat[neighbor]) & (z.flat[neighbor] == 0):
+ z.flat[neighbor] = i
+ next_queue.append(neighbor)
+ while next_queue:
+ next_cell = next_queue.pop()
+ cur_queue.append(next_cell)
+ # Invert gradient
+ max_incs = np.zeros(numlabels + 1)
+ for i in range(n):
+ label = labels.flat[i]
+ inc = z.flat[i]
+ max_incs[label] = max(max_incs[label], inc)
+ for i in range(n):
+ if z.flat[i]:
+ label = labels.flat[i]
+ z.flat[i] = max_incs[label] - z.flat[i]
+ return z
+
+@njit(uint16[:,:](uint32[:,:], boolean[:,:], float64[:,:], int64),
+ cache=True)
+def _grad_towards_lower_numba(lec, flats, dem, max_iter=1000):
+ offset = flats.shape[1]
+ size = flats.size
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ z = np.zeros(flats.shape, dtype=np.uint16)
+ cur_queue = []
+ next_queue = []
+ for i in range(size):
+ label = lec.flat[i]
+ if label:
+ z.flat[i] = 1
+ cur_queue.append(i)
+ for i in range(2, max_iter + 1):
+ if not cur_queue:
+ break
+ while cur_queue:
+ k = cur_queue.pop()
+ on_left = ((k % offset) == 0)
+ on_right = (((k + 1) % offset) == 0)
+ on_top = (k < offset)
+ on_bottom = (k > (size - offset - 1))
+ on_boundary = (on_left | on_right | on_top | on_bottom)
+ neighbors = offsets + k
+ for j in range(8):
+ if on_boundary:
+ if (on_left) & ((j == 5) | (j == 6) | (j == 7)):
+ continue
+ if (on_right) & ((j == 1) | (j == 2) | (j == 3)):
+ continue
+ if (on_top) & ((j == 0) | (j == 1) | (j == 7)):
+ continue
+ if (on_bottom) & ((j == 3) | (j == 4) | (j == 5)):
+ continue
+ neighbor = neighbors[j]
+ neighbor_is_flat = flats.flat[neighbor]
+ not_visited = z.flat[neighbor] == 0
+ same_elev = dem.flat[neighbor] == dem.flat[k]
+ if (neighbor_is_flat & not_visited & same_elev):
+ z.flat[neighbor] = i
+ next_queue.append(neighbor)
+ while next_queue:
+ next_cell = next_queue.pop()
+ cur_queue.append(next_cell)
+ return z
+
+# Functions for 'compute_hand'
+
+@njit(int64[:,:](int64[:,:], boolean[:,:], UniTuple(int64, 8)),
+ cache=True)
+def _d8_hand_iter_numba(fdir, mask, dirmap):
+ offset = fdir.shape[1]
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ r_dirmap = np.array([dirmap[4], dirmap[5], dirmap[6],
+ dirmap[7], dirmap[0], dirmap[1],
+ dirmap[2], dirmap[3]])
+ hand = -np.ones(fdir.shape, dtype=np.int64)
+ cur_queue = []
+ next_queue = []
+ for i in range(hand.size):
+ if mask.flat[i]:
+ hand.flat[i] = i
+ cur_queue.append(i)
+ while True:
+ if not cur_queue:
+ break
+ while cur_queue:
+ k = cur_queue.pop()
+ neighbors = offsets + k
+ for j in range(8):
+ neighbor = neighbors[j]
+ points_to = (fdir.flat[neighbor] == r_dirmap[j])
+ not_visited = (hand.flat[neighbor] < 0)
+ if points_to and not_visited:
+ hand.flat[neighbor] = hand.flat[k]
+ next_queue.append(neighbor)
+ while next_queue:
+ next_cell = next_queue.pop()
+ cur_queue.append(next_cell)
+ return hand
+
+@njit(void(int64, int64, int64[:,:], int64[:], int64[:], int64[:,:]),
+ cache=True)
+def _d8_hand_recursion(child, parent, hand, offsets, r_dirmap, fdir):
+ neighbors = offsets + child
+ for k in range(8):
+ neighbor = neighbors[k]
+ points_to = (fdir.flat[neighbor] == r_dirmap[k])
+ not_visited = (hand.flat[neighbor] == -1)
+ if points_to and not_visited:
+ hand.flat[neighbor] = parent
+ _d8_hand_recursion(neighbor, parent, hand, offsets, r_dirmap, fdir)
+
+@njit(int64[:,:](int64[:], int64[:,:], UniTuple(int64, 8)),
+ cache=True)
+def _d8_hand_recursive_numba(parents, fdir, dirmap):
+ n = parents.size
+ offset = fdir.shape[1]
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ r_dirmap = np.array([dirmap[4], dirmap[5], dirmap[6],
+ dirmap[7], dirmap[0], dirmap[1],
+ dirmap[2], dirmap[3]])
+ hand = -np.ones(fdir.shape, dtype=np.int64)
+ for i in range(n):
+ parent = parents[i]
+ hand.flat[parent] = parent
+ for i in range(n):
+ parent = parents[i]
+ _d8_hand_recursion(parent, parent, hand, offsets, r_dirmap, fdir)
+ return hand
+
+@njit(int64[:,:](int64[:,:], int64[:,:], boolean[:,:], UniTuple(int64, 8)),
+ cache=True)
+def _dinf_hand_iter_numba(fdir_0, fdir_1, mask, dirmap):
+ offset = fdir_0.shape[1]
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ r_dirmap = np.array([dirmap[4], dirmap[5], dirmap[6],
+ dirmap[7], dirmap[0], dirmap[1],
+ dirmap[2], dirmap[3]])
+ hand = -np.ones(fdir_0.shape, dtype=np.int64)
+ cur_queue = []
+ next_queue = []
+ for i in range(hand.size):
+ if mask.flat[i]:
+ hand.flat[i] = i
+ cur_queue.append(i)
+ while True:
+ if not cur_queue:
+ break
+ while cur_queue:
+ k = cur_queue.pop()
+ neighbors = offsets + k
+ for j in range(8):
+ neighbor = neighbors[j]
+ points_to = ((fdir_0.flat[neighbor] == r_dirmap[j]) |
+ (fdir_1.flat[neighbor] == r_dirmap[j]))
+ not_visited = (hand.flat[neighbor] < 0)
+ if points_to and not_visited:
+ hand.flat[neighbor] = hand.flat[k]
+ next_queue.append(neighbor)
+ while next_queue:
+ next_cell = next_queue.pop()
+ cur_queue.append(next_cell)
+ return hand
+
+@njit(void(int64, int64, int64[:,:], int64[:], int64[:], int64[:,:], int64[:,:]),
+ cache=True)
+def _dinf_hand_recursion(child, parent, hand, offsets, r_dirmap, fdir_0, fdir_1):
+ neighbors = offsets + child
+ for k in range(8):
+ neighbor = neighbors[k]
+ points_to = ((fdir_0.flat[neighbor] == r_dirmap[k]) |
+ (fdir_1.flat[neighbor] == r_dirmap[k]))
+ not_visited = (hand.flat[neighbor] == -1)
+ if points_to and not_visited:
+ hand.flat[neighbor] = parent
+ _dinf_hand_recursion(neighbor, parent, hand, offsets, r_dirmap, fdir_0, fdir_1)
+
+@njit(int64[:,:](int64[:], int64[:,:], int64[:,:], UniTuple(int64, 8)),
+ cache=True)
+def _dinf_hand_recursive_numba(parents, fdir_0, fdir_1, dirmap):
+ n = parents.size
+ offset = fdir_0.shape[1]
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ r_dirmap = np.array([dirmap[4], dirmap[5], dirmap[6],
+ dirmap[7], dirmap[0], dirmap[1],
+ dirmap[2], dirmap[3]])
+ hand = -np.ones(fdir_0.shape, dtype=np.int64)
+ for i in range(n):
+ parent = parents[i]
+ hand.flat[parent] = parent
+ for i in range(n):
+ parent = parents[i]
+ _dinf_hand_recursion(parent, parent, hand, offsets, r_dirmap, fdir_0, fdir_1)
+ return hand
+
+@njit(float64[:,:](int64[:,:], float64[:,:], float64),
+ parallel=True,
+ cache=True)
+def _assign_hand_heights_numba(hand_idx, dem, nodata_out=np.nan):
+ n = hand_idx.size
+ hand = np.zeros(dem.shape, dtype=np.float64)
+ for i in prange(n):
+ j = hand_idx.flat[i]
+ if j == -1:
+ hand.flat[i] = np.nan
+ else:
+ hand.flat[i] = dem.flat[i] - dem.flat[j]
+ return hand
+
+# Functions for 'streamorder'
+
+@njit(void(int64, int64, int64[:,:], int64[:,:], int64[:,:], int64[:,:], uint8[:], uint8[:]),
+ cache=True)
+def _d8_streamorder_recursion(startnode, endnode, min_order, max_order,
+ order, fdir, indegree, orig_indegree):
+ min_order.flat[endnode] = min(min_order.flat[endnode], order.flat[startnode])
+ max_order.flat[endnode] = max(max_order.flat[endnode], order.flat[startnode])
+ indegree.flat[endnode] -= 1
+ if indegree.flat[endnode] == 0:
+ if (min_order.flat[endnode] == max_order.flat[endnode]) and (orig_indegree.flat[endnode] > 1):
+ order.flat[endnode] = max_order.flat[endnode] + 1
+ else:
+ order.flat[endnode] = max_order.flat[endnode]
+ new_startnode = endnode
+ new_endnode = fdir.flat[new_startnode]
+ _d8_streamorder_recursion(new_startnode, new_endnode, min_order,
+ max_order, order, fdir, indegree, orig_indegree)
+
+@njit(int64[:,:](int64[:,:], int64[:,:], int64[:,:], int64[:,:], uint8[:], uint8[:], int64[:]),
+ cache=True)
+def _d8_streamorder_numba(min_order, max_order, order, fdir,
+ indegree, orig_indegree, startnodes):
+ n = startnodes.size
+ for k in range(n):
+ startnode = startnodes.flat[k]
+ endnode = fdir.flat[startnode]
+ _d8_streamorder_recursion(startnode, endnode, min_order, max_order, order,
+ fdir, indegree, orig_indegree)
+ return order
+
+@njit(void(int64, int64, int64[:,:], uint8[:], uint8[:], List(List(int64)), List(int64)),
+ cache=True)
+def _d8_stream_network_recursion(startnode, endnode, fdir, indegree,
+ orig_indegree, profiles, profile):
+ profile.append(endnode)
+ if (orig_indegree[endnode] > 1):
+ profiles.append(profile)
+ indegree.flat[endnode] -= 1
+ if (indegree.flat[endnode] == 0):
+ if (orig_indegree[endnode] > 1):
+ profile = [endnode]
+ new_startnode = endnode
+ new_endnode = fdir.flat[new_startnode]
+ _d8_stream_network_recursion(new_startnode, new_endnode, fdir, indegree,
+ orig_indegree, profiles, profile)
+
+@njit(List(List(int64))(int64[:,:], uint8[:], uint8[:], int64[:]),
+ cache=True)
+def _d8_stream_network_numba(fdir, indegree, orig_indegree, startnodes):
+ n = startnodes.size
+ profiles = [[0]]
+ _ = profiles.pop()
+ for k in range(n):
+ startnode = startnodes.flat[k]
+ endnode = fdir.flat[startnode]
+ profile = [startnode]
+ _d8_stream_network_recursion(startnode, endnode, fdir, indegree,
+ orig_indegree, profiles, profile)
+ return profiles
+
+@njit(parallel=True)
+def _d8_cell_dh_numba(startnodes, endnodes, dem):
+ n = startnodes.size
+ dh = np.zeros_like(dem)
+ for k in prange(n):
+ startnode = startnodes.flat[k]
+ endnode = endnodes.flat[k]
+ dh.flat[k] = dem.flat[startnode] - dem.flat[endnode]
+ return dh
+
+@njit(parallel=True)
+def _dinf_cell_dh_numba(startnodes, endnodes_0, endnodes_1, props_0, props_1, dem):
+ n = startnodes.size
+ dh = np.zeros(dem.shape, dtype=np.float64)
+ for k in prange(n):
+ startnode = startnodes.flat[k]
+ endnode_0 = endnodes_0.flat[k]
+ endnode_1 = endnodes_1.flat[k]
+ prop_0 = props_0.flat[k]
+ prop_1 = props_1.flat[k]
+ dh.flat[k] = (prop_0 * (dem.flat[startnode] - dem.flat[endnode_0]) +
+ prop_1 * (dem.flat[startnode] - dem.flat[endnode_1]))
+ return dh
+
+@njit(parallel=True)
+def _d8_cell_distances_numba(fdir, dirmap, dx, dy):
+ n = fdir.size
+ cdist = np.zeros(fdir.shape, dtype=np.float64)
+ dd = np.sqrt(dx**2 + dy**2)
+ distances = (dy, dd, dx, dd, dy, dd, dx, dd)
+ dist_map = {0 : 0.}
+ for i in range(8):
+ dist_map[dirmap[i]] = distances[i]
+ for k in prange(n):
+ fdir_k = fdir.flat[k]
+ cdist.flat[k] = dist_map[fdir_k]
+ return cdist
+
+@njit(parallel=True)
+def _dinf_cell_distances_numba(fdir_0, fdir_1, prop_0, prop_1, dirmap, dx, dy):
+ n = fdir_0.size
+ cdist = np.zeros(fdir_0.shape, dtype=np.float64)
+ dd = np.sqrt(dx**2 + dy**2)
+ distances = (dy, dd, dx, dd, dy, dd, dx, dd)
+ dist_map = {0 : 0.}
+ for i in range(8):
+ dist_map[dirmap[i]] = distances[i]
+ for k in prange(n):
+ fdir_k_0 = fdir_0.flat[k]
+ fdir_k_1 = fdir_1.flat[k]
+ dist_k_0 = dist_map[fdir_k_0]
+ dist_k_1 = dist_map[fdir_k_1]
+ prop_k_0 = prop_0.flat[k]
+ prop_k_1 = prop_1.flat[k]
+ dist_k = prop_k_0 * dist_k_0 + prop_k_1 * dist_k_1
+ cdist.flat[k] = dist_k
+ return cdist
+
+@njit(parallel=True)
+def _cell_slopes_numba(dh, cdist):
+ n = dh.size
+ slopes = np.zeros(dh.shape, dtype=np.float64)
+ for k in prange(n):
+ dh_k = dh.flat[k]
+ cdist_k = cdist.flat[k]
+ if (cdist_k == 0):
+ slopes.flat[k] = 0.
+ else:
+ slopes.flat[k] = dh_k / cdist_k
+ return slopes
+
+@njit(void(int64, int64[:,:], int64[:,:], int64, int64, int64, boolean[:,:]),
+ cache=True)
+def _dinf_fix_cycles_recursion(node, fdir_0, fdir_1, ancestor,
+ depth, max_cycle_size, visited):
+ if visited.flat[node]:
+ return None
+ if depth > max_cycle_size:
+ return None
+ left = fdir_0.flat[node]
+ right = fdir_1.flat[node]
+ if left == ancestor:
+ fdir_0.flat[node] = right
+ return None
+ else:
+ _dinf_fix_cycles_recursion(left, fdir_0, fdir_1, ancestor,
+ depth + 1, max_cycle_size, visited)
+ if right == ancestor:
+ fdir_1.flat[node] = left
+ return None
+ else:
+ _dinf_fix_cycles_recursion(right, fdir_0, fdir_1, ancestor,
+ depth + 1, max_cycle_size, visited)
+
+@njit(void(int64[:,:], int64[:,:], int64),
+ cache=True)
+def _dinf_fix_cycles_numba(fdir_0, fdir_1, max_cycle_size):
+ n = fdir_0.size
+ visited = np.zeros(fdir_0.shape, dtype=np.bool8)
+ depth = 0
+ for node in range(n):
+ _dinf_fix_cycles_recursion(node, fdir_0, fdir_1, node,
+ depth, max_cycle_size, visited)
+ visited.flat[node] = True
+
+# TODO: Assumes pits and flats are removed
+@njit(int64[:,:](int64[:,:], UniTuple(int64, 8)),
+ parallel=True,
+ cache=True)
+def _flatten_fdir_numba(fdir, dirmap):
+ r, c = fdir.shape
+ n = fdir.size
+ flat_fdir = np.zeros((r, c), dtype=np.int64)
+ offsets = ( 0 - c,
+ 1 - c,
+ 1 + 0,
+ 1 + c,
+ 0 + c,
+ -1 + c,
+ -1 + 0,
+ -1 - c
+ )
+ offset_map = {0 : 0}
+ left_map = {0 : 0}
+ right_map = {0 : 0}
+ top_map = {0 : 0}
+ bottom_map = {0 : 0}
+ for i in range(8):
+ # Inside cells
+ offset_map[dirmap[i]] = offsets[i]
+ # Left boundary
+ if i in {5, 6, 7}:
+ left_map[dirmap[i]] = 0
+ else:
+ left_map[dirmap[i]] = offsets[i]
+ # Right boundary
+ if i in {1, 2, 3}:
+ right_map[dirmap[i]] = 0
+ else:
+ right_map[dirmap[i]] = offsets[i]
+ # Top boundary
+ if i in {7, 0, 1}:
+ top_map[dirmap[i]] = 0
+ else:
+ top_map[dirmap[i]] = offsets[i]
+ # Bottom boundary
+ if i in {3, 4, 5}:
+ bottom_map[dirmap[i]] = 0
+ else:
+ bottom_map[dirmap[i]] = offsets[i]
+ for k in prange(n):
+ cell_dir = fdir.flat[k]
+ on_left = ((k % c) == 0)
+ on_right = (((k + 1) % c) == 0)
+ on_top = (k < c)
+ on_bottom = (k > (n - c - 1))
+ on_boundary = (on_left | on_right | on_top | on_bottom)
+ if on_boundary:
+ if on_left:
+ offset = left_map[cell_dir]
+ if on_right:
+ offset = right_map[cell_dir]
+ if on_top:
+ offset = top_map[cell_dir]
+ if on_bottom:
+ offset = bottom_map[cell_dir]
+ else:
+ offset = offset_map[cell_dir]
+ flat_fdir.flat[k] = k + offset
+ return flat_fdir
+
+@njit(int64[:,:](int64[:,:], UniTuple(int64, 8)),
+ parallel=True,
+ cache=True)
+def _flatten_fdir_no_boundary(fdir, dirmap):
+ r, c = fdir.shape
+ n = fdir.size
+ flat_fdir = np.zeros((r, c), dtype=np.int64)
+ offsets = ( 0 - c,
+ 1 - c,
+ 1 + 0,
+ 1 + c,
+ 0 + c,
+ -1 + c,
+ -1 + 0,
+ -1 - c
+ )
+ offset_map = {0 : 0}
+ for i in range(8):
+ offset_map[dirmap[i]] = offsets[i]
+ for k in prange(n):
+ cell_dir = fdir.flat[k]
+ offset = offset_map[cell_dir]
+ flat_fdir.flat[k] = k + offset
+ return flat_fdir
+
+@njit
+def _construct_matching(fdir, dirmap):
+ n = fdir.size
+ startnodes = np.arange(n, dtype=np.int64)
+ endnodes = _flatten_fdir_numba(fdir, dirmap).ravel()
+ return startnodes, endnodes
+
+@njit(boolean[:,:](float64[:,:], int64[:]),
+ parallel=True,
+ cache=True)
+def _find_pits_numba(dem, inside):
+ n = inside.size
+ offset = dem.shape[1]
+ pits = np.zeros(dem.shape, dtype=np.bool8)
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ for i in prange(n):
+ k = inside[i]
+ inner_neighbors = (k + offsets)
+ is_pit = True
+ for j in prange(8):
+ neighbor = inner_neighbors[j]
+ diff = dem.flat[k] - dem.flat[neighbor]
+ is_pit &= (diff < 0)
+ pits.flat[k] = is_pit
+ return pits
+
+@njit(float64[:,:](float64[:,:], int64[:]),
+ parallel=True,
+ cache=True)
+def _fill_pits_numba(dem, pit_indices):
+ n = pit_indices.size
+ offset = dem.shape[1]
+ pits_filled = np.copy(dem).astype(np.float64)
+ max_diff = dem.max() - dem.min()
+ offsets = np.array([-offset, 1 - offset, 1,
+ 1 + offset, offset, - 1 + offset,
+ - 1, - 1 - offset])
+ for i in prange(n):
+ k = pit_indices[i]
+ inner_neighbors = (k + offsets)
+ adjustment = max_diff
+ for j in prange(8):
+ neighbor = inner_neighbors[j]
+ diff = dem.flat[neighbor] - dem.flat[k]
+ adjustment = min(diff, adjustment)
+ pits_filled.flat[k] += (adjustment)
+ return pits_filled
diff --git a/pysheds/_sview.py b/pysheds/_sview.py
new file mode 100644
index 0000000..0ff1a5f
--- /dev/null
+++ b/pysheds/_sview.py
@@ -0,0 +1,139 @@
+import numpy as np
+from numba import njit, prange
+from numba.types import float64, UniTuple
+
+@njit(parallel=True)
+def _view_fill_numba(data, out, y_ix, x_ix, y_passed, x_passed):
+ n = x_ix.size
+ m = y_ix.size
+ for i in prange(m):
+ for j in prange(n):
+ if (y_passed[i]) & (x_passed[j]):
+ out[i, j] = data[y_ix[i], x_ix[j]]
+ return out
+
+@njit(parallel=True)
+def _view_fill_by_axes_nearest_numba(data, out, y_ix, x_ix):
+ m, n = y_ix.size, x_ix.size
+ M, N = data.shape
+ # Currently need to use inplace form of round
+ y_near = np.empty(m, dtype=np.int64)
+ x_near = np.empty(n, dtype=np.int64)
+ np.around(y_ix, 0, y_near).astype(np.int64)
+ np.around(x_ix, 0, x_near).astype(np.int64)
+ y_in_bounds = ((y_near >= 0) & (y_near < M))
+ x_in_bounds = ((x_near >= 0) & (x_near < N))
+ for i in prange(m):
+ for j in prange(n):
+ if (y_in_bounds[i]) & (x_in_bounds[j]):
+ out[i, j] = data[y_near[i], x_near[j]]
+ return out
+
+@njit(parallel=True)
+def _view_fill_by_axes_linear_numba(data, out, y_ix, x_ix):
+ m, n = y_ix.size, x_ix.size
+ M, N = data.shape
+ # Find which cells are in bounds
+ y_in_bounds = ((y_ix >= 0) & (y_ix < M))
+ x_in_bounds = ((x_ix >= 0) & (x_ix < N))
+ # Compute upper and lower values of y and x
+ y_floor = np.floor(y_ix).astype(np.int64)
+ y_ceil = y_floor + 1
+ x_floor = np.floor(x_ix).astype(np.int64)
+ x_ceil = x_floor + 1
+ # Compute fractional distance between adjacent cells
+ ty = (y_ix - y_floor)
+ tx = (x_ix - x_floor)
+ # Handle lower and right boundaries
+ lower_boundary = (y_ceil == M)
+ right_boundary = (x_ceil == N)
+ y_ceil[lower_boundary] = y_floor[lower_boundary]
+ x_ceil[right_boundary] = x_floor[right_boundary]
+ ty[lower_boundary] = 0.
+ tx[right_boundary] = 0.
+ for i in prange(m):
+ for j in prange(n):
+ if (y_in_bounds[i]) & (x_in_bounds[j]):
+ ul = data[y_floor[i], x_floor[j]]
+ ur = data[y_floor[i], x_ceil[j]]
+ ll = data[y_ceil[i], x_floor[j]]
+ lr = data[y_ceil[i], x_ceil[j]]
+ value = ( ( ( 1 - tx[j] ) * ( 1 - ty[i] ) * ul )
+ + ( tx[j] * ( 1 - ty[i] ) * ur )
+ + ( ( 1 - tx[j] ) * ty[i] * ll )
+ + ( tx[j] * ty[i] * lr ) )
+ out[i, j] = value
+ return out
+
+@njit(parallel=True)
+def _view_fill_by_entries_nearest_numba(data, out, y_ix, x_ix):
+ m, n = y_ix.size, x_ix.size
+ M, N = data.shape
+ # Currently need to use inplace form of round
+ y_near = np.empty(m, dtype=np.int64)
+ x_near = np.empty(n, dtype=np.int64)
+ np.around(y_ix, 0, y_near).astype(np.int64)
+ np.around(x_ix, 0, x_near).astype(np.int64)
+ y_in_bounds = ((y_near >= 0) & (y_near < M))
+ x_in_bounds = ((x_near >= 0) & (x_near < N))
+ # x and y indices should be the same size
+ assert(n == m)
+ for i in prange(n):
+ if (y_in_bounds[i]) & (x_in_bounds[i]):
+ out.flat[i] = data[y_near[i], x_near[i]]
+ return out
+
+@njit(parallel=True)
+def _view_fill_by_entries_linear_numba(data, out, y_ix, x_ix):
+ m, n = y_ix.size, x_ix.size
+ M, N = data.shape
+ # Find which cells are in bounds
+ y_in_bounds = ((y_ix >= 0) & (y_ix < M))
+ x_in_bounds = ((x_ix >= 0) & (x_ix < N))
+ # Compute upper and lower values of y and x
+ y_floor = np.floor(y_ix).astype(np.int64)
+ y_ceil = y_floor + 1
+ x_floor = np.floor(x_ix).astype(np.int64)
+ x_ceil = x_floor + 1
+ # Compute fractional distance between adjacent cells
+ ty = (y_ix - y_floor)
+ tx = (x_ix - x_floor)
+ # Handle lower and right boundaries
+ lower_boundary = (y_ceil == M)
+ right_boundary = (x_ceil == N)
+ y_ceil[lower_boundary] = y_floor[lower_boundary]
+ x_ceil[right_boundary] = x_floor[right_boundary]
+ ty[lower_boundary] = 0.
+ tx[right_boundary] = 0.
+ # x and y indices should be the same size
+ assert(n == m)
+ for i in prange(n):
+ if (y_in_bounds[i]) & (x_in_bounds[i]):
+ ul = data[y_floor[i], x_floor[i]]
+ ur = data[y_floor[i], x_ceil[i]]
+ ll = data[y_ceil[i], x_floor[i]]
+ lr = data[y_ceil[i], x_ceil[i]]
+ value = ( ( ( 1 - tx[i] ) * ( 1 - ty[i] ) * ul )
+ + ( tx[i] * ( 1 - ty[i] ) * ur )
+ + ( ( 1 - tx[i] ) * ty[i] * ll )
+ + ( tx[i] * ty[i] * lr ) )
+ out.flat[i] = value
+ return out
+
+@njit(UniTuple(float64[:], 2)(UniTuple(float64, 9), float64[:], float64[:]), parallel=True)
+def _affine_map_vec_numba(affine, x, y):
+ a, b, c, d, e, f, _, _, _ = affine
+ n = x.size
+ new_x = np.zeros(n, dtype=np.float64)
+ new_y = np.zeros(n, dtype=np.float64)
+ for i in prange(n):
+ new_x[i] = x[i] * a + y[i] * b + c
+ new_y[i] = x[i] * d + y[i] * e + f
+ return new_x, new_y
+
+@njit(UniTuple(float64, 2)(UniTuple(float64, 9), float64, float64))
+def _affine_map_scalar_numba(affine, x, y):
+ a, b, c, d, e, f, _, _, _ = affine
+ new_x = x * a + y * b + c
+ new_y = x * d + y * e + f
+ return new_x, new_y
diff --git a/pysheds/grid.py b/pysheds/grid.py
index 25987f0..56b5da8 100644
--- a/pysheds/grid.py
+++ b/pysheds/grid.py
@@ -1,3540 +1,9 @@
-import sys
-import ast
-import copy
-import warnings
-import pyproj
-import numpy as np
-import pandas as pd
-import geojson
-from affine import Affine
-from distutils.version import LooseVersion
try:
- import scipy.sparse
- import scipy.spatial
- from scipy.sparse import csgraph
- import scipy.interpolate
- _HAS_SCIPY = True
+ import numba
+ _HAS_NUMBA = True
except:
- _HAS_SCIPY = False
-try:
- import skimage.measure
- import skimage.transform
- import skimage.morphology
- _HAS_SKIMAGE = True
-except:
- _HAS_SKIMAGE = False
-try:
- import rasterio
- import rasterio.features
- _HAS_RASTERIO = True
-except:
- _HAS_RASTERIO = False
-
-_OLD_PYPROJ = LooseVersion(pyproj.__version__) < LooseVersion('2.2')
-_pyproj_crs = lambda Proj: Proj.crs if not _OLD_PYPROJ else Proj
-_pyproj_crs_is_geographic = 'is_latlong' if _OLD_PYPROJ else 'is_geographic'
-_pyproj_init = '+init=epsg:4326' if _OLD_PYPROJ else 'epsg:4326'
-
-from pysheds.view import Raster
-from pysheds.view import BaseViewFinder, RegularViewFinder, IrregularViewFinder
-from pysheds.view import RegularGridViewer, IrregularGridViewer
-
-class Grid(object):
- """
- Container class for holding and manipulating gridded data.
-
- Attributes
- ==========
- affine : Affine transformation matrix (uses affine module)
- shape : The shape of the grid (number of rows, number of columns).
- bbox : The geographical bounding box of the current view of the gridded data
- (xmin, ymin, xmax, ymax).
- mask : A boolean array used to mask certain grid cells in the bbox;
- may be used to indicate which cells lie inside a catchment.
-
- Methods
- =======
- --------
- File I/O
- --------
- add_gridded_data : Add a gridded dataset (dem, flowdir, accumulation)
- to Grid instance (generic method).
- read_ascii : Read an ascii grid from a file and add it to a
- Grid instance.
- read_raster : Read a raster file and add the data to a Grid
- instance.
- from_ascii : Initializes Grid from an ascii file.
- from_raster : Initializes Grid from a raster file.
- to_ascii : Writes current "view" of gridded dataset(s) to ascii file.
- ----------
- Hydrologic
- ----------
- flowdir : Generate a flow direction grid from a given digital elevation
- dataset (dem). Does not currently handle flats.
- catchment : Delineate the watershed for a given pour point (x, y)
- or (column, row).
- accumulation : Compute the number of cells upstream of each cell.
- flow_distance : Compute the distance (in cells) from each cell to the
- outlet.
- extract_river_network : Extract river segments from a catchment.
- fraction : Generate the fractional contributing area for a coarse
- scale flow direction grid based on a fine-scale flow
- direction grid.
- ---------------
- Data Processing
- ---------------
- view : Returns a "view" of a dataset defined by an affine transformation
- self.affine (can optionally be masked with self.mask).
- set_bbox : Sets the bbox of the current "view" (self.bbox).
- set_nodata : Sets the nodata value for a given dataset.
- grid_indices : Returns arrays containing the geographic coordinates
- of the grid's rows and columns for the current "view".
- nearest_cell : Returns the index (column, row) of the cell closest
- to a given geographical coordinate (x, y).
- clip_to : Clip the bbox to the smallest area containing all non-
- null gridcells for a provided dataset.
- """
-
- def __init__(self, affine=Affine(0,0,0,0,0,0), shape=(1,1), nodata=0,
- crs=pyproj.Proj(_pyproj_init),
- mask=None):
- self.affine = affine
- self.shape = shape
- self.nodata = nodata
- self.crs = crs
- # TODO: Mask should be a raster, not an array
- if mask is None:
- self.mask = np.ones(shape)
- self.grids = []
-
- @property
- def defaults(self):
- props = {
- 'affine' : Affine(0,0,0,0,0,0),
- 'shape' : (1,1),
- 'nodata' : 0,
- 'crs' : pyproj.Proj(_pyproj_init),
- }
- return props
-
- def add_gridded_data(self, data, data_name, affine=None, shape=None, crs=None,
- nodata=None, mask=None, metadata={}):
- """
- A generic method for adding data into a Grid instance.
- Inserts data into a named attribute of Grid (name of attribute
- determined by keyword 'data_name').
-
- Parameters
- ----------
- data : numpy ndarray
- Data to be inserted into Grid instance.
- data_name : str
- Name of dataset. Will determine the name of the attribute
- representing the gridded data.
- affine : affine.Affine
- Affine transformation matrix defining the cell size and bounding
- box (see the affine module for more information).
- shape : tuple of int (length 2)
- Shape (rows, columns) of data.
- crs : dict
- Coordinate reference system of gridded data.
- nodata : int or float
- Value indicating no data in the input array.
- mask : numpy ndarray
- Boolean array indicating which cells should be masked.
- metadata : dict
- Other attributes describing dataset, such as direction
- mapping for flow direction files. e.g.:
- metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
- 'routing' : 'd8'}
- """
- if isinstance(data, Raster):
- if affine is None:
- affine = data.affine
- shape = data.shape
- crs = data.crs
- nodata = data.nodata
- mask = data.mask
- else:
- if mask is None:
- mask = np.ones(shape, dtype=np.bool)
- if shape is None:
- shape = data.shape
- if not isinstance(data, np.ndarray):
- raise TypeError('Input data must be ndarray')
- # if there are no datasets, initialize bbox, shape,
- # cellsize and crs based on incoming data
- if len(self.grids) < 1:
- # check validity of shape
- if ((hasattr(shape, "__len__")) and (not isinstance(shape, str))
- and (len(shape) == 2) and (isinstance(sum(shape), int))):
- shape = tuple(shape)
- else:
- raise TypeError('shape must be a tuple of ints of length 2.')
- if crs is not None:
- if isinstance(crs, pyproj.Proj):
- pass
- elif isinstance(crs, dict) or isinstance(crs, str):
- crs = pyproj.Proj(crs)
- else:
- raise TypeError('Valid crs required')
- if isinstance(affine, Affine):
- pass
- else:
- raise TypeError('affine transformation matrix required')
- # initialize instance metadata
- self.affine = affine
- self.shape = shape
- self.crs = crs
- self.nodata = nodata
- self.mask = mask
- # assign new data to attribute; record nodata value
- viewfinder = RegularViewFinder(affine=affine, shape=shape, mask=mask, nodata=nodata,
- crs=crs)
- data = Raster(data, viewfinder, metadata=metadata)
- self.grids.append(data_name)
- setattr(self, data_name, data)
-
- def read_ascii(self, data, data_name, skiprows=6, crs=pyproj.Proj(_pyproj_init),
- xll='lower', yll='lower', metadata={}, **kwargs):
- """
- Reads data from an ascii file into a named attribute of Grid
- instance (name of attribute determined by 'data_name').
-
- Parameters
- ----------
- data : str
- File name or path.
- data_name : str
- Name of dataset. Will determine the name of the attribute
- representing the gridded data.
- skiprows : int (optional)
- The number of rows taken up by the header (defaults to 6).
- crs : pyroj.Proj
- Coordinate reference system of ascii data.
- xll : 'lower' or 'center' (str)
- Whether XLLCORNER or XLLCENTER is used.
- yll : 'lower' or 'center' (str)
- Whether YLLCORNER or YLLCENTER is used.
- metadata : dict
- Other attributes describing dataset, such as direction
- mapping for flow direction files. e.g.:
- metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
- 'routing' : 'd8'}
-
- Additional keyword arguments are passed to numpy.loadtxt()
- """
- with open(data) as header:
- ncols = int(header.readline().split()[1])
- nrows = int(header.readline().split()[1])
- xll = ast.literal_eval(header.readline().split()[1])
- yll = ast.literal_eval(header.readline().split()[1])
- cellsize = ast.literal_eval(header.readline().split()[1])
- nodata = ast.literal_eval(header.readline().split()[1])
- shape = (nrows, ncols)
- data = np.loadtxt(data, skiprows=skiprows, **kwargs)
- nodata = data.dtype.type(nodata)
- affine = Affine(cellsize, 0, xll, 0, -cellsize, yll + nrows * cellsize)
- self.add_gridded_data(data=data, data_name=data_name, affine=affine, shape=shape,
- crs=crs, nodata=nodata, metadata=metadata)
-
- def read_raster(self, data, data_name, band=1, window=None, window_crs=None,
- metadata={}, mask_geometry=False, **kwargs):
- """
- Reads data from a raster file into a named attribute of Grid
- (name of attribute determined by keyword 'data_name').
-
- Parameters
- ----------
- data : str
- File name or path.
- data_name : str
- Name of dataset. Will determine the name of the attribute
- representing the gridded data.
- band : int
- The band number to read if multiband.
- window : tuple
- If using windowed reading, specify window (xmin, ymin, xmax, ymax).
- window_crs : pyproj.Proj instance
- Coordinate reference system of window. If None, assume it's in raster's crs.
- mask_geometry : iterable object
- The values must be a GeoJSON-like dict or an object that implements
- the Python geo interface protocol (such as a Shapely Polygon).
- metadata : dict
- Other attributes describing dataset, such as direction
- mapping for flow direction files. e.g.:
- metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
- 'routing' : 'd8'}
-
- Additional keyword arguments are passed to rasterio.open()
- """
- # read raster file
- if not _HAS_RASTERIO:
- raise ImportError('Requires rasterio module')
- mask = None
- with rasterio.open(data, **kwargs) as f:
- crs = pyproj.Proj(f.crs, preserve_units=True)
- if window is None:
- shape = f.shape
- if len(f.indexes) > 1:
- data = np.ma.filled(f.read_band(band))
- else:
- data = np.ma.filled(f.read())
- affine = f.transform
- data = data.reshape(shape)
- else:
- if window_crs is not None:
- if window_crs.srs != crs.srs:
- xmin, ymin, xmax, ymax = window
- if _OLD_PYPROJ:
- extent = pyproj.transform(window_crs, crs, (xmin, xmax),
- (ymin, ymax))
- else:
- extent = pyproj.transform(window_crs, crs, (xmin, xmax),
- (ymin, ymax), errcheck=True,
- always_xy=True)
- window = (extent[0][0], extent[1][0], extent[0][1], extent[1][1])
- # If window crs not specified, assume it's in raster crs
- ix_window = f.window(*window)
- if len(f.indexes) > 1:
- data = np.ma.filled(f.read_band(band, window=ix_window))
- else:
- data = np.ma.filled(f.read(window=ix_window))
- affine = f.window_transform(ix_window)
- data = np.squeeze(data)
- shape = data.shape
- if mask_geometry:
- mask = rasterio.features.geometry_mask(mask_geometry, shape, affine, invert=True)
- if not mask.any(): # no mask was applied if all False, out of bounds
- warnings.warn('mask_geometry does not fall within the bounds of the raster!')
- mask = ~mask # return mask to all True and deliver warning
- nodata = f.nodatavals[0]
- if nodata is not None:
- nodata = data.dtype.type(nodata)
- self.add_gridded_data(data=data, data_name=data_name, affine=affine, shape=shape,
- crs=crs, nodata=nodata, mask=mask, metadata=metadata)
-
- @classmethod
- def from_ascii(cls, path, data_name, **kwargs):
- newinstance = cls()
- newinstance.read_ascii(path, data_name, **kwargs)
- return newinstance
-
- @classmethod
- def from_raster(cls, path, data_name, **kwargs):
- newinstance = cls()
- newinstance.read_raster(path, data_name, **kwargs)
- return newinstance
-
- def grid_indices(self, affine=None, shape=None, col_ascending=True, row_ascending=False):
- """
- Return row and column coordinates of the grid based on an affine transformation and
- a grid shape.
-
- Parameters
- ----------
- affine: affine.Affine
- Affine transformation matrix. Defualts to self.affine.
- shape : tuple of ints (length 2)
- The shape of the 2D array (rows, columns). Defaults
- to self.shape.
- col_ascending : bool
- If True, return column coordinates in ascending order.
- row_ascending : bool
- If True, return row coordinates in ascending order.
- """
- if affine is None:
- affine = self.affine
- if shape is None:
- shape = self.shape
- y_ix = np.arange(shape[0])
- x_ix = np.arange(shape[1])
- if row_ascending:
- y_ix = y_ix[::-1]
- if not col_ascending:
- x_ix = x_ix[::-1]
- x, _ = affine * np.vstack([x_ix, np.zeros(shape[1])])
- _, y = affine * np.vstack([np.zeros(shape[0]), y_ix])
- return y, x
-
- def view(self, data, data_view=None, target_view=None, apply_mask=True,
- nodata=None, interpolation='nearest', as_crs=None, return_coords=False,
- kx=3, ky=3, s=0, tolerance=1e-3, dtype=None, metadata={}):
- """
- Return a copy of a gridded dataset clipped to the current "view". The view is determined by
- an affine transformation which describes the bounding box and cellsize of the grid.
- The view will also optionally mask grid cells according to the boolean array self.mask.
-
- Parameters
- ----------
- data : str or Raster
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- data_view : RegularViewFinder or IrregularViewFinder
- The view at which the data is defined (based on an affine
- transformation and shape). Defaults to the Raster dataset's
- viewfinder attribute.
- target_view : RegularViewFinder or IrregularViewFinder
- The desired view (based on an affine transformation and shape)
- Defaults to a viewfinder based on self.affine and self.shape.
- apply_mask : bool
- If True, "mask" the view using self.mask.
- nodata : int or float
- Value indicating no data in output array.
- Defaults to the `nodata` attribute of the input dataset.
- interpolation: 'nearest', 'linear', 'cubic', 'spline'
- Interpolation method to be used. If both the input data
- view and output data view can be defined on a regular grid,
- all interpolation methods are available. If one
- of the datasets cannot be defined on a regular grid, or the
- datasets use a different CRS, only 'nearest', 'linear' and
- 'cubic' are available.
- as_crs: pyproj.Proj
- Projection at which to view the data (overrides self.crs).
- return_coords: bool
- If True, return the coordinates corresponding to each value
- in the output array.
- kx, ky: int
- Degrees of the bivariate spline, if 'spline' interpolation is desired.
- s : float
- Smoothing factor of the bivariate spline, if 'spline' interpolation is desired.
- tolerance: float
- Maximum tolerance when matching coordinates. Data coordinates
- that cannot be matched to a target coordinate within this
- tolerance will be masked with the nodata value in the output array.
- dtype: numpy datatype
- Desired datatype of the output array.
- """
- # Check interpolation method
- try:
- interpolation = interpolation.lower()
- assert(interpolation in ('nearest', 'linear', 'cubic', 'spline'))
- except:
- raise ValueError("Interpolation method must be one of: "
- "'nearest', 'linear', 'cubic', 'spline'")
- # Parse data
- if isinstance(data, str):
- data = getattr(self, data)
- if nodata is None:
- nodata = data.nodata
- if data_view is None:
- data_view = data.viewfinder
- metadata.update(data.metadata)
- elif isinstance(data, Raster):
- if nodata is None:
- nodata = data.nodata
- if data_view is None:
- data_view = data.viewfinder
- metadata.update(data.metadata)
- else:
- # If not using a named dataset, make sure the data and view are properly defined
- try:
- assert(isinstance(data, np.ndarray))
- except:
- raise
- # TODO: Should convert array to dataset here
- if nodata is None:
- nodata = data_view.nodata
- # If no target view provided, construct one based on grid parameters
- if target_view is None:
- target_view = RegularViewFinder(affine=self.affine, shape=self.shape,
- mask=self.mask, crs=self.crs, nodata=nodata)
- # If viewing at a different crs, convert coordinates
- if as_crs is not None:
- assert(isinstance(as_crs, pyproj.Proj))
- target_coords = target_view.coords
- new_coords = self._convert_grid_indices_crs(target_coords, target_view.crs, as_crs)
- new_x, new_y = new_coords[:,1], new_coords[:,0]
- # TODO: In general, crs conversion will yield irregular grid (though not necessarily)
- target_view = IrregularViewFinder(coords=np.column_stack([new_y, new_x]),
- shape=target_view.shape, crs=as_crs,
- nodata=target_view.nodata)
- # Specify mask
- mask = target_view.mask
- # Make sure views are ViewFinder instances
- assert(issubclass(type(data_view), BaseViewFinder))
- assert(issubclass(type(target_view), BaseViewFinder))
- same_crs = target_view.crs.srs == data_view.crs.srs
- # If crs does not match, convert coords of data array to target array
- if not same_crs:
- data_coords = data_view.coords
- # TODO: x and y order might be different
- new_coords = self._convert_grid_indices_crs(data_coords, data_view.crs, target_view.crs)
- new_x, new_y = new_coords[:,1], new_coords[:,0]
- # TODO: In general, crs conversion will yield irregular grid (though not necessarily)
- data_view = IrregularViewFinder(coords=np.column_stack([new_y, new_x]),
- shape=data_view.shape, crs=target_view.crs,
- nodata=data_view.nodata)
- # Check if data can be described by regular grid
- data_is_grid = isinstance(data_view, RegularViewFinder)
- view_is_grid = isinstance(target_view, RegularViewFinder)
- # If data is on a grid, use the following speedup
- if data_is_grid and view_is_grid:
- # If doing nearest neighbor search, use fast sorted search
- if interpolation == 'nearest':
- array_view = RegularGridViewer._view_affine(data, data_view, target_view)
- # If spline interpolation is needed, use RectBivariate
- elif interpolation == 'spline':
- # If latitude/longitude, use RectSphereBivariate
- if getattr(_pyproj_crs(target_view.crs), _pyproj_crs_is_geographic):
- array_view = RegularGridViewer._view_rectspherebivariate(data, data_view,
- target_view,
- x_tolerance=tolerance,
- y_tolerance=tolerance,
- kx=kx, ky=ky, s=s)
- # If not latitude/longitude, use RectBivariate
- else:
- array_view = RegularGridViewer._view_rectbivariate(data, data_view,
- target_view,
- x_tolerance=tolerance,
- y_tolerance=tolerance,
- kx=kx, ky=ky, s=s)
- # If some other interpolation method is needed, use griddata
- else:
- array_view = IrregularGridViewer._view_griddata(data, data_view, target_view,
- method=interpolation)
- # If either view is irregular, use griddata
- else:
- array_view = IrregularGridViewer._view_griddata(data, data_view, target_view,
- method=interpolation)
- # TODO: This could be dangerous if it returns an irregular view
- array_view = Raster(array_view, target_view, metadata=metadata)
- # Ensure masking is safe by checking datatype
- if dtype is None:
- dtype = max(np.min_scalar_type(nodata), data.dtype)
- # For matplotlib imshow compatibility
- if issubclass(dtype.type, np.floating):
- dtype = max(dtype, np.dtype(np.float32))
- array_view = array_view.astype(dtype)
- # Apply mask
- if apply_mask:
- np.place(array_view, ~mask, nodata)
- # Return output
- if return_coords:
- return array_view, target_view.coords
- else:
- return array_view
-
- def resize(self, data, new_shape, out_suffix='_resized', inplace=True,
- nodata_in=None, nodata_out=np.nan, apply_mask=False, ignore_metadata=True, **kwargs):
- """
- Resize a gridded dataset to a different shape (uses skimage.transform.resize).
- data : str or Raster
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- new_shape: tuple of int (length 2)
- Desired array shape.
- out_suffix: str
- If writing to a named attribute, the suffix to apply to the output name.
- inplace : bool
- If True, resized array will be written to '_'.
- Otherwise, return the output array.
- nodata_in : int or float
- Value indicating no data in input array.
- Defaults to the `nodata` attribute of the input dataset.
- nodata_out : int or float
- Value indicating no data in output array.
- Defaults to np.nan.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and crs.
- """
- # Filter warnings due to invalid values
- np.warnings.filterwarnings(action='ignore', message='The default mode',
- category=UserWarning)
- np.warnings.filterwarnings(action='ignore', message='Anti-aliasing',
- category=UserWarning)
- nodata_in = self._check_nodata_in(data, nodata_in)
- if isinstance(data, str):
- out_name = '{0}{1}'.format(data, out_suffix)
- else:
- out_name = 'data_{1}'.format(out_suffix)
- grid_props = {'nodata' : nodata_out}
- metadata = {}
- data = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=grid_props, ignore_metadata=ignore_metadata,
- metadata=metadata)
- data = skimage.transform.resize(data, new_shape, **kwargs)
- return self._output_handler(data=data, out_name=out_name, properties=grid_props,
- inplace=inplace, metadata=metadata)
-
- def nearest_cell(self, x, y, affine=None, snap='corner'):
- """
- Returns the index of the cell (column, row) closest
- to a given geographical coordinate.
-
- Parameters
- ----------
- x : int or float
- x coordinate.
- y : int or float
- y coordinate.
- affine : affine.Affine
- Affine transformation that defines the translation between
- geographic x/y coordinate and array row/column coordinate.
- Defaults to self.affine.
- snap : str
- Indicates the cell indexing method. If "corner", will resolve to
- snapping the (x,y) geometry to the index of the nearest top-left
- cell corner. If "center", will return the index of the cell that
- the geometry falls within.
- Returns
- -------
- x_i, y_i : tuple of ints
- Column index and row index
- """
- if not affine:
- affine = self.affine
- try:
- assert isinstance(affine, Affine)
- except:
- raise TypeError('affine must be an Affine instance.')
- snap_dict = {'corner': np.around, 'center': np.floor}
- col, row = snap_dict[snap](~affine * (x, y)).astype(int)
- return col, row
-
- def set_bbox(self, new_bbox):
- """
- Sets new bbox while maintaining the same cell dimensions. Updates
- self.affine and self.shape. Also resets self.mask.
-
- Note that this method rounds the given bbox to match the existing
- cell dimensions.
-
- Parameters
- ----------
- new_bbox : tuple of floats (length 4)
- (xmin, ymin, xmax, ymax)
- """
- affine = self.affine
- xmin, ymin, xmax, ymax = new_bbox
- ul = np.around(~affine * (xmin, ymax)).astype(int)
- lr = np.around(~affine * (xmax, ymin)).astype(int)
- xmin, ymax = affine * tuple(ul)
- shape = tuple(lr - ul)[::-1]
- new_affine = Affine(affine.a, affine.b, xmin,
- affine.d, affine.e, ymax)
- self.affine = new_affine
- self.shape = shape
- #TODO: For now, simply reset mask
- self.mask = np.ones(shape, dtype=np.bool)
-
- def set_indices(self, new_indices):
- """
- Updates self.affine and self.shape to correspond to new indices representing
- a new bounding rectangle. Also resets self.mask.
-
- Parameters
- ----------
- new_indices : tuple of ints (length 4)
- (xmin_index, ymin_index, xmax_index, ymax_index)
- """
- affine = self.affine
- assert all((isinstance(ix, int) for ix in new_indices))
- ul = np.asarray((new_indices[0], new_indices[3]))
- lr = np.asarray((new_indices[2], new_indices[1]))
- xmin, ymax = affine * tuple(ul)
- shape = tuple(lr - ul)[::-1]
- new_affine = Affine(affine.a, affine.b, xmin,
- affine.d, affine.e, ymax)
- self.affine = new_affine
- self.shape = shape
- #TODO: For now, simply reset mask
- self.mask = np.ones(shape, dtype=np.bool)
-
- def flowdir(self, data, out_name='dir', nodata_in=None, nodata_out=None,
- pits=-1, flats=-1, dirmap=(64, 128, 1, 2, 4, 8, 16, 32), routing='d8',
- inplace=True, as_crs=None, apply_mask=False, ignore_metadata=False,
- **kwargs):
- """
- Generates a flow direction grid from a DEM grid.
-
- Parameters
- ----------
- data : str or Raster
- DEM data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- out_name : string
- Name of attribute containing new flow direction array.
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value to indicate nodata in output array.
- pits : int
- Value to indicate pits in output array.
- flats : int
- Value to indicate flat areas in output array.
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- 'dinf' : D-infinity flow directions
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- as_crs : pyproj.Proj instance
- CRS projection to use when computing slopes.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and crs.
- """
- dirmap = self._set_dirmap(dirmap, data)
- nodata_in = self._check_nodata_in(data, nodata_in)
- properties = {'nodata' : nodata_out}
- metadata = {'dirmap' : dirmap}
- dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=properties, ignore_metadata=ignore_metadata,
- **kwargs)
- if nodata_in is None:
- dem_mask = np.array([]).astype(int)
- else:
- if np.isnan(nodata_in):
- dem_mask = np.where(np.isnan(dem.ravel()))[0]
- else:
- dem_mask = np.where(dem.ravel() == nodata_in)[0]
- if routing.lower() == 'd8':
- if nodata_out is None:
- nodata_out = 0
- return self._d8_flowdir(dem=dem, dem_mask=dem_mask, out_name=out_name,
- nodata_in=nodata_in, nodata_out=nodata_out, pits=pits,
- flats=flats, dirmap=dirmap, inplace=inplace, as_crs=as_crs,
- apply_mask=apply_mask, ignore_metdata=ignore_metadata,
- properties=properties, metadata=metadata, **kwargs)
- elif routing.lower() == 'dinf':
- if nodata_out is None:
- nodata_out = np.nan
- return self._dinf_flowdir(dem=dem, dem_mask=dem_mask, out_name=out_name,
- nodata_in=nodata_in, nodata_out=nodata_out, pits=pits,
- flats=flats, dirmap=dirmap, inplace=inplace, as_crs=as_crs,
- apply_mask=apply_mask, ignore_metdata=ignore_metadata,
- properties=properties, metadata=metadata, **kwargs)
-
- def _d8_flowdir(self, dem=None, dem_mask=None, out_name='dir', nodata_in=None, nodata_out=0,
- pits=-1, flats=-1, dirmap=(64, 128, 1, 2, 4, 8, 16, 32), inplace=True,
- as_crs=None, apply_mask=False, ignore_metadata=False, properties={},
- metadata={}, **kwargs):
- np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
- category=RuntimeWarning)
- try:
- # Make sure nothing flows to the nodata cells
- dem.flat[dem_mask] = dem.max() + 1
- inside = self._inside_indices(dem, mask=dem_mask)
- inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
- # Optionally, project DEM before computing slopes
- if as_crs is not None:
- indices = np.vstack(np.dstack(np.meshgrid(
- *self.grid_indices(affine=dem.affine, shape=dem.shape),
- indexing='ij')))
- # TODO: Should probably use dataset crs instead of instance crs
- indices = self._convert_grid_indices_crs(indices, dem.crs, as_crs)
- y_sur = indices[:,0].flat[inner_neighbors]
- x_sur = indices[:,1].flat[inner_neighbors]
- dy = indices[:,0].flat[inside] - y_sur
- dx = indices[:,1].flat[inside] - x_sur
- cell_dists = np.sqrt(dx**2 + dy**2)
- else:
- dx = abs(dem.affine.a)
- dy = abs(dem.affine.e)
- ddiag = np.sqrt(dx**2 + dy**2)
- cell_dists = (np.array([dy, ddiag, dx, ddiag, dy, ddiag, dx, ddiag])
- .reshape(-1, 1))
- slope = diff / cell_dists
- # TODO: This assigns directions arbitrarily if multiple steepest paths exist
- fdir = np.where(fdir_defined, np.argmax(slope, axis=0), -1) + 1
- # If direction numbering isn't default, convert values of output array.
- if dirmap != (1, 2, 3, 4, 5, 6, 7, 8):
- fdir = np.asarray([0] + list(dirmap))[fdir]
- pits_bool = (diff < 0).all(axis=0)
- flats_bool = (~fdir_defined & ~pits_bool)
- fdir[pits_bool] = pits
- fdir[flats_bool] = flats
- fdir_out = np.full(dem.shape, nodata_out)
- fdir_out.flat[inside] = fdir
- except:
- raise
- finally:
- if nodata_in is not None:
- dem.flat[dem_mask] = nodata_in
- return self._output_handler(data=fdir_out, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
- def _dinf_flowdir(self, dem=None, dem_mask=None, out_name='dir', nodata_in=None, nodata_out=0,
- pits=-1, flats=-1, dirmap=(64, 128, 1, 2, 4, 8, 16, 32), inplace=True,
- as_crs=None, apply_mask=False, ignore_metadata=False, properties={},
- metadata={}, **kwargs):
- # Filter warnings due to invalid values
- np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
- category=RuntimeWarning)
- try:
- # Make sure nothing flows to the nodata cells
- dem.flat[dem_mask] = dem.max() + 1
- inside = self._inside_indices(dem)
- inner_neighbors = self._select_surround_ravel(inside, dem.shape).T
- if as_crs is not None:
- indices = np.vstack(np.dstack(np.meshgrid(
- *self.grid_indices(affine=dem.affine, shape=dem.shape),
- indexing='ij')))
- # TODO: Should probably use dataset crs instead of instance crs
- indices = self._convert_grid_indices_crs(indices, dem.crs, as_crs)
- y_sur = indices[:,0].flat[inner_neighbors]
- x_sur = indices[:,1].flat[inner_neighbors]
- dy = indices[:,0].flat[inside] - y_sur
- dx = indices[:,1].flat[inside] - x_sur
- cell_dists = np.sqrt(dx**2 + dy**2)
- else:
- dx = abs(dem.affine.a)
- dy = abs(dem.affine.e)
- ddiag = np.sqrt(dx**2 + dy**2)
- # TODO: Inconsistent with d8, which reshapes
- cell_dists = (np.array([dy, ddiag, dx, ddiag, dy, ddiag, dx, ddiag]))
- # TODO: This array switching is unnecessary
- inner_neighbors = inner_neighbors[[2, 1, 0, 7, 6, 5, 4, 3]]
- cell_dists = cell_dists[[2, 1, 0, 7, 6, 5, 4, 3]]
- R = np.zeros((8, inside.size))
- S = np.zeros((8, inside.size))
- dirs = range(8)
- e1s = [0, 2, 2, 4, 4, 6, 6, 0]
- e2s = [1, 1, 3, 3, 5, 5, 7, 7]
- d1s = [0, 2, 2, 4, 4, 6, 6, 0]
- d2s = [2, 0, 4, 2, 6, 4, 0, 6]
- for i, e1_i, e2_i, d1_i, d2_i in zip(dirs, e1s, e2s, d1s, d2s):
- r, s = self.facet_flow(dem.flat[inside],
- dem.flat[inner_neighbors[e1_i]],
- dem.flat[inner_neighbors[e2_i]],
- d1=cell_dists[d1_i],
- d2=cell_dists[d2_i])
- R[i, :] = r
- S[i, :] = s
- S_max = np.max(S, axis=0)
- k_max = np.argmax(S, axis=0)
- del S
- ac = np.asarray([0, 1, 1, 2, 2, 3, 3, 4])
- af = np.asarray([1, -1, 1, -1, 1, -1, 1, -1])
- R = (af[k_max] * R[k_max, np.arange(R.shape[-1])]) + (ac[k_max] * np.pi / 2)
- R[S_max < 0] = pits
- R[S_max == 0] = flats
- fdir_out = np.full(dem.shape, nodata_out, dtype=float)
- # TODO: Should use .flat[inside] instead of [1:-1]?
- fdir_out[1:-1, 1:-1] = R.reshape(dem.shape[0] - 2, dem.shape[1] - 2)
- fdir_out = fdir_out % (2 * np.pi)
- except:
- raise
- finally:
- if nodata_in is not None:
- dem.flat[dem_mask] = nodata_in
- return self._output_handler(data=fdir_out, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
- def facet_flow(self, e0, e1, e2, d1=1, d2=1):
- s1 = (e0 - e1)/d1
- s2 = (e1 - e2)/d2
- r = np.arctan2(s2, s1)
- s = np.hypot(s1, s2)
- diag_angle = np.arctan2(d2, d1)
- diag_distance = np.hypot(d1, d2)
- b0 = (r < 0)
- b1 = (r > diag_angle)
- r[b0] = 0
- s[b0] = s1[b0]
- if isinstance(diag_angle, np.ndarray):
- r[b1] = diag_angle[b1]
- else:
- r[b1] = diag_angle
- s[b1] = ((e0 - e2)/diag_distance)[b1]
- return r, s
-
- def catchment(self, x, y, data, pour_value=None, out_name='catch', dirmap=None,
- nodata_in=None, nodata_out=0, xytype='index', routing='d8',
- recursionlimit=15000, inplace=True, apply_mask=False, ignore_metadata=False,
- snap='corner', **kwargs):
- """
- Delineates a watershed from a given pour point (x, y).
-
- Parameters
- ----------
- x : int or float
- x coordinate of pour point
- y : int or float
- y coordinate of pour point
- data : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- pour_value : int or None
- If not None, value to represent pour point in catchment
- grid (required by some programs).
- out_name : string
- Name of attribute containing new catchment array.
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value to indicate nodata in output array.
- xytype : 'index' or 'label'
- How to interpret parameters 'x' and 'y'.
- 'index' : x and y represent the column and row
- indices of the pour point.
- 'label' : x and y represent geographic coordinates
- (will be passed to self.nearest_cell).
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- 'dinf' : D-infinity flow directions
- recursionlimit : int
- Recursion limit--may need to be raised if
- recursion limit is reached.
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and crs.
- snap : str
- Function to use on array for indexing:
- 'corner' : numpy.around()
- 'center' : numpy.floor()
- """
- # TODO: Why does this use set_dirmap but flowdir doesn't?
- dirmap = self._set_dirmap(dirmap, data)
- nodata_in = self._check_nodata_in(data, nodata_in)
- properties = {'nodata' : nodata_out}
- # TODO: This will overwrite metadata if provided
- metadata = {'dirmap' : dirmap}
- # initialize array to collect catchment cells
- fdir = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=properties, ignore_metadata=ignore_metadata,
- **kwargs)
- xmin, ymin, xmax, ymax = fdir.bbox
- if xytype in ('label', 'coordinate'):
- if (x < xmin) or (x > xmax) or (y < ymin) or (y > ymax):
- raise ValueError('Pour point ({}, {}) is out of bounds for dataset with bbox {}.'
- .format(x, y, (xmin, ymin, xmax, ymax)))
- elif xytype == 'index':
- if (x < 0) or (y < 0) or (x >= fdir.shape[1]) or (y >= fdir.shape[0]):
- raise ValueError('Pour point ({}, {}) is out of bounds for dataset with shape {}.'
- .format(x, y, fdir.shape))
- if routing.lower() == 'd8':
- return self._d8_catchment(x, y, fdir=fdir, pour_value=pour_value, out_name=out_name,
- dirmap=dirmap, nodata_in=nodata_in, nodata_out=nodata_out,
- xytype=xytype, recursionlimit=recursionlimit, inplace=inplace,
- apply_mask=apply_mask, ignore_metadata=ignore_metadata,
- properties=properties, metadata=metadata, snap=snap, **kwargs)
- elif routing.lower() == 'dinf':
- return self._dinf_catchment(x, y, fdir=fdir, pour_value=pour_value, out_name=out_name,
- dirmap=dirmap, nodata_in=nodata_in, nodata_out=nodata_out,
- xytype=xytype, recursionlimit=recursionlimit, inplace=inplace,
- apply_mask=apply_mask, ignore_metadata=ignore_metadata,
- properties=properties, metadata=metadata, **kwargs)
-
- def _d8_catchment(self, x, y, fdir=None, pour_value=None, out_name='catch', dirmap=None,
- nodata_in=None, nodata_out=0, xytype='index', recursionlimit=15000,
- inplace=True, apply_mask=False, ignore_metadata=False, properties={},
- metadata={}, snap='corner', **kwargs):
-
- # Vectorized Recursive algorithm:
- # for each cell j, recursively search through grid to determine
- # if surrounding cells are in the contributing area, then add
- # flattened indices to self.collect
- def d8_catchment_search(cells):
- nonlocal collect
- nonlocal fdir
- collect.extend(cells)
- selection = self._select_surround_ravel(cells, fdir.shape)
- # TODO: Why use np.where here?
- next_idx = selection[(fdir.flat[selection] == r_dirmap)]
- if next_idx.any():
- return d8_catchment_search(next_idx)
- try:
- # Pad the rim
- left, right, top, bottom = self._pop_rim(fdir, nodata=nodata_in)
- # get shape of padded flow direction array, then flatten
- # if xytype is 'label', delineate catchment based on cell nearest
- # to given geographic coordinate
- # Valid if the dataset is a view.
- if xytype == 'label':
- x, y = self.nearest_cell(x, y, fdir.affine, snap)
- # get the flattened index of the pour point
- pour_point = np.ravel_multi_index(np.array([y, x]),
- fdir.shape)
- # reorder direction mapping to work with select_surround_ravel()
- r_dirmap = np.array(dirmap)[[4, 5, 6, 7, 0, 1, 2, 3]].tolist()
- pour_point = np.array([pour_point])
- # set recursion limit (needed for large datasets)
- sys.setrecursionlimit(recursionlimit)
- # call catchment search starting at the pour point
- collect = []
- d8_catchment_search(pour_point)
- # initialize output array
- outcatch = np.zeros(fdir.shape, dtype=int)
- # if nodata is not 0, replace 0 with nodata value in output array
- if nodata_out != 0:
- np.place(outcatch, outcatch == 0, nodata_out)
- # set values of output array based on 'collected' cells
- outcatch.flat[collect] = fdir.flat[collect]
- # if pour point needs to be a special value, set it
- if pour_value is not None:
- outcatch[y, x] = pour_value
- except:
- raise
- finally:
- # reset recursion limit
- sys.setrecursionlimit(1000)
- self._replace_rim(fdir, left, right, top, bottom)
- return self._output_handler(data=outcatch, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
- def _dinf_catchment(self, x, y, fdir=None, pour_value=None, out_name='catch', dirmap=None,
- nodata_in=None, nodata_out=0, xytype='index', recursionlimit=15000,
- inplace=True, apply_mask=False, ignore_metadata=False, properties={},
- metadata={}, snap='corner', **kwargs):
- # Filter warnings due to invalid values
- np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
- category=RuntimeWarning)
- # Vectorized Recursive algorithm:
- # for each cell j, recursively search through grid to determine
- # if surrounding cells are in the contributing area, then add
- # flattened indices to self.collect
- def dinf_catchment_search(cells):
- nonlocal domain
- nonlocal unique
- nonlocal collect
- nonlocal visited
- nonlocal fdir_0
- nonlocal fdir_1
- unique[cells] = True
- cells = domain[unique]
- unique.fill(False)
- collect.extend(cells)
- visited.flat[cells] = True
- selection = self._select_surround_ravel(cells, fdir.shape)
- points_to = ((fdir_0.flat[selection] == r_dirmap) |
- (fdir_1.flat[selection] == r_dirmap))
- unvisited = (~(visited.flat[selection]))
- next_idx = selection[points_to & unvisited]
- if next_idx.any():
- return dinf_catchment_search(next_idx)
-
- try:
- # Split dinf flowdir
- fdir_0, fdir_1, prop_0, prop_1 = self.angle_to_d8(fdir, dirmap=dirmap)
- # Find invalid cells
- invalid_cells = ((fdir < 0) | (fdir > (np.pi * 2)))
- # Pad the rim
- left_0, right_0, top_0, bottom_0 = self._pop_rim(fdir_0, nodata=nodata_in)
- left_1, right_1, top_1, bottom_1 = self._pop_rim(fdir_1, nodata=nodata_in)
- # Ensure proportion of flow is never zero
- fdir_0.flat[prop_0 == 0] = fdir_1.flat[prop_0 == 0]
- fdir_1.flat[prop_1 == 0] = fdir_0.flat[prop_1 == 0]
- # Set nodata cells to zero
- fdir_0[invalid_cells] = 0
- fdir_1[invalid_cells] = 0
- # Create indexing arrays for convenience
- domain = np.arange(fdir.size, dtype=np.min_scalar_type(fdir.size))
- unique = np.zeros(fdir.size, dtype=np.bool)
- visited = np.zeros(fdir.size, dtype=np.bool)
- # if xytype is 'label', delineate catchment based on cell nearest
- # to given geographic coordinate
- # TODO: This relies on the bbox of the grid instance, not the dataset
- # Valid if the dataset is a view.
- if xytype == 'label':
- x, y = self.nearest_cell(x, y, fdir.affine, snap)
- # get the flattened index of the pour point
- pour_point = np.ravel_multi_index(np.array([y, x]),
- fdir.shape)
- # reorder direction mapping to work with select_surround_ravel()
- r_dirmap = np.array(dirmap)[[4, 5, 6, 7, 0, 1, 2, 3]].tolist()
- pour_point = np.array([pour_point])
- # set recursion limit (needed for large datasets)
- sys.setrecursionlimit(recursionlimit)
- # call catchment search starting at the pour point
- collect = []
- dinf_catchment_search(pour_point)
- del fdir_0
- del fdir_1
- # initialize output array
- outcatch = np.full(fdir.shape, nodata_out)
- # set values of output array based on 'collected' cells
- outcatch.flat[collect] = fdir.flat[collect]
- # if pour point needs to be a special value, set it
- if pour_value is not None:
- outcatch[y, x] = pour_value
- except:
- raise
- finally:
- # reset recursion limit
- sys.setrecursionlimit(1000)
- return self._output_handler(data=outcatch, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
- def angle_to_d8(self, angle, dirmap=(64, 128, 1, 2, 4, 8, 16, 32)):
- mod = np.pi/4
- c0_order = [2, 1, 0, 7, 6, 5, 4, 3]
- c1_order = [1, 0, 7, 6, 5, 4, 3, 2]
- c0 = np.asarray(np.asarray(dirmap)[c0_order].tolist() + [0], dtype=np.uint8)
- c1 = np.asarray(np.asarray(dirmap)[c1_order].tolist() + [0], dtype=np.uint8)
- zmod = angle % (mod)
- zfloor = (angle // mod)
- zfloor[np.isnan(zfloor)] = 8
- zfloor = zfloor.astype(np.uint8)
- prop_1 = (zmod / mod).ravel()
- prop_0 = 1 - prop_1
- prop_0[np.isnan(prop_0)] = 0
- prop_1[np.isnan(prop_1)] = 0
- fdir_0 = c0.flat[zfloor]
- fdir_1 = c1.flat[zfloor]
- return fdir_0, fdir_1, prop_0, prop_1
-
- # def fraction(self, other, nodata=0, out_name='frac', inplace=True):
- # """
- # Generates a grid representing the fractional contributing area for a
- # coarse-scale flow direction grid.
-
- # Parameters
- # ----------
- # other : Grid instance
- # Another Grid instance containing fine-scale flow direction
- # data. The ratio of self.cellsize/other.cellsize must be a
- # positive integer. Grid cell boundaries must have some overlap.
- # Must have attributes 'dir' and 'catch' (i.e. must have a flow
- # direction grid, along with a delineated catchment).
- # nodata : int or float
- # Value to indicate no data in output array.
- # inplace : bool (optional)
- # If True, appends fraction grid to attribute 'frac'.
- # """
- # # check for required attributes in self and other
- # raise NotImplementedError('fraction is currently not implemented.')
- # assert hasattr(self, 'dir')
- # assert hasattr(other, 'dir')
- # assert hasattr(other, 'catch')
- # # set scale ratio
- # raw_ratio = self.cellsize / other.cellsize
- # if np.allclose(int(round(raw_ratio)), raw_ratio):
- # cell_ratio = int(round(raw_ratio))
- # else:
- # raise ValueError('Ratio of cell sizes must be an integer')
- # # create DataFrames for self and other with geographic coordinates
- # # as row and column labels. entries in selfdf represent cell indices.
- # selfdf = pd.DataFrame(
- # np.arange(self.view('dir', apply_mask=False).size).reshape(self.shape),
- # index=np.linspace(self.bbox[1], self.bbox[3],
- # self.shape[0], endpoint=False)[::-1],
- # columns=np.linspace(self.bbox[0], self.bbox[2],
- # self.shape[1], endpoint=False)
- # )
- # otherrows, othercols = self.grid_indices(other.affine, other.shape)
- # # reindex self to other based on column labels and fill nulls with
- # # nearest neighbor
- # result = (selfdf.reindex(otherrows, method='nearest')
- # .reindex(othercols, axis=1, method='nearest'))
- # initial_counts = np.bincount(result.values.ravel(),
- # minlength=selfdf.size).astype(float)
- # # mask cells not in catchment of 'other'
- # result = result.values[np.where(other.view('catch') !=
- # other.grid_props['catch']['nodata'], True, False)]
- # final_counts = np.bincount(result, minlength=selfdf.size).astype(float)
- # # count remaining indices and divide by the original number of indices
- # result = (final_counts / initial_counts).reshape(selfdf.shape)
- # # take care of nans
- # if np.isnan(result).any():
- # result = pd.DataFrame(result).fillna(0).values.astype(float)
- # # replace 0 with nodata value
- # if nodata != 0:
- # np.place(result, result == 0, nodata)
- # private_props = {'nodata' : nodata}
- # grid_props = self._generate_grid_props(**private_props)
- # return self._output_handler(result, inplace, out_name=out_name, **grid_props)
-
- def accumulation(self, data, weights=None, dirmap=None, nodata_in=None, nodata_out=0, efficiency=None,
- out_name='acc', routing='d8', inplace=True, pad=False, apply_mask=False,
- ignore_metadata=False, **kwargs):
- """
- Generates an array of flow accumulation, where cell values represent
- the number of upstream cells.
-
- Parameters
- ----------
- data : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- weights: numpy ndarray
-- Array of weights to be applied to each accumulation cell. Must
-- be same size as data.
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- efficiency: numpy ndarray
- transport efficiency, relative correction factor applied to the
- outflow of each cell
- nodata will be set to 1, i.e. no correction
- Must be same size as data.
- nodata_in : int or float
- Value to indicate nodata in input array. If using a named dataset, will
- default to the 'nodata' value of the named dataset. If using an ndarray,
- will default to 0.
- nodata_out : int or float
- Value to indicate nodata in output array.
- out_name : string
- Name of attribute containing new accumulation array.
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- 'dinf' : D-infinity flow directions
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- pad : bool
- If True, pad the rim of the input array with zeros. Else, ignore
- the outer rim of cells in the computation.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and crs.
- """
- dirmap = self._set_dirmap(dirmap, data)
- nodata_in = self._check_nodata_in(data, nodata_in)
- properties = {'nodata' : nodata_out}
- # TODO: This will overwrite any provided metadata
- metadata = {}
- fdir = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=properties,
- ignore_metadata=ignore_metadata, **kwargs)
-
- # something for the future
- #eff = self._input_handler(efficiency, apply_mask=apply_mask, properties=properties,
- # ignore_metadata=ignore_metadata, **kwargs)
- # default efficiency for nodata is 1
- #eff[eff==self._check_nodata_in(efficiency, None)] = 1
-
- if routing.lower() == 'd8':
- return self._d8_accumulation(fdir=fdir, weights=weights, dirmap=dirmap, efficiency=efficiency,
- nodata_in=nodata_in, nodata_out=nodata_out,
- out_name=out_name, inplace=inplace, pad=pad,
- apply_mask=apply_mask, ignore_metadata=ignore_metadata,
- properties=properties, metadata=metadata, **kwargs)
- elif routing.lower() == 'dinf':
- return self._dinf_accumulation(fdir=fdir, weights=weights, dirmap=dirmap,efficiency=efficiency,
- nodata_in=nodata_in, nodata_out=nodata_out,
- out_name=out_name, inplace=inplace, pad=pad,
- apply_mask=apply_mask, ignore_metadata=ignore_metadata,
- properties=properties, metadata=metadata, **kwargs)
-
- def _d8_accumulation(self, fdir=None, weights=None, dirmap=None, nodata_in=None, nodata_out=0,efficiency=None,
- out_name='acc', inplace=True, pad=False, apply_mask=False,
- ignore_metadata=False, properties={}, metadata={}, **kwargs):
- # Pad the rim
- if pad:
- fdir = np.pad(fdir, (1,1), mode='constant', constant_values=0)
- else:
- left, right, top, bottom = self._pop_rim(fdir, nodata=0)
- mintype = np.min_scalar_type(fdir.size)
- fdir_orig_type = fdir.dtype
- # Construct flat index onto flow direction array
- domain = np.arange(fdir.size, dtype=mintype)
- try:
- if nodata_in is None:
- nodata_cells = np.zeros_like(fdir).astype(bool)
- else:
- if np.isnan(nodata_in):
- nodata_cells = (np.isnan(fdir))
- else:
- nodata_cells = (fdir == nodata_in)
- invalid_cells = ~np.in1d(fdir.ravel(), dirmap)
- invalid_entries = fdir.flat[invalid_cells]
- fdir.flat[invalid_cells] = 0
- # Ensure consistent types
- fdir = fdir.astype(mintype)
- # Set nodata cells to zero
- fdir[nodata_cells] = 0
- # Get matching of start and end nodes
- startnodes, endnodes = self._construct_matching(fdir, domain,
- dirmap=dirmap)
- if weights is not None:
- assert(weights.size == fdir.size)
- # TODO: Why flatten? Does this prevent weights from being modified?
- acc = weights.flatten()
- else:
- acc = (~nodata_cells).ravel().astype(int)
-
- if efficiency is not None:
- assert(efficiency.size == fdir.size)
- eff = efficiency.flatten() # must be flattened to avoid IndexError below
- acc = acc.astype(float)
- eff_max, eff_min = np.max(eff), np.min(eff)
- assert((eff_max<=1) and (eff_min>=0))
-
- indegree = np.bincount(endnodes)
- indegree = indegree.reshape(acc.shape).astype(np.uint8)
- startnodes = startnodes[(indegree == 0)]
- endnodes = fdir.flat[startnodes]
- # separate for loop to avoid performance hit when
- # efficiency is None
- if efficiency is None: # no efficiency
- for _ in range(fdir.size):
- if endnodes.any():
- np.add.at(acc, endnodes, acc[startnodes])
- np.subtract.at(indegree, endnodes, 1)
- startnodes = np.unique(endnodes)
- startnodes = startnodes[indegree[startnodes] == 0]
- endnodes = fdir.flat[startnodes]
- else:
- break
- else: # apply efficiency
- for _ in range(fdir.size):
- if endnodes.any():
- # we need flattened efficiency, otherwise IndexError
- np.add.at(acc, endnodes, acc[startnodes] * eff[startnodes])
- np.subtract.at(indegree, endnodes, 1)
- startnodes = np.unique(endnodes)
- startnodes = startnodes[indegree[startnodes] == 0]
- endnodes = fdir.flat[startnodes]
- else:
- break
- # TODO: Hacky: should probably fix this
- acc[0] = 1
- # Reshape and offset accumulation
- acc = np.reshape(acc, fdir.shape)
- if pad:
- acc = acc[1:-1, 1:-1]
- except:
- raise
- finally:
- # Clean up
- self._unflatten_fdir(fdir, domain, dirmap)
- fdir = fdir.astype(fdir_orig_type)
- fdir.flat[invalid_cells] = invalid_entries
- if nodata_in is not None:
- fdir[nodata_cells] = nodata_in
- if pad:
- fdir = fdir[1:-1, 1:-1]
- else:
- self._replace_rim(fdir, left, right, top, bottom)
- return self._output_handler(data=acc, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
- def _dinf_accumulation(self, fdir=None, weights=None, dirmap=None, nodata_in=None, nodata_out=0,efficiency=None,
- out_name='acc', inplace=True, pad=False, apply_mask=False,
- ignore_metadata=False, properties={}, metadata={}, **kwargs):
- # Filter warnings due to invalid values
- np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
- category=RuntimeWarning)
- # Pad the rim
- if pad:
- fdir = np.pad(fdir, (1,1), mode='constant', constant_values=nodata_in)
- else:
- left, right, top, bottom = self._pop_rim(fdir, nodata=nodata_in)
- # Construct flat index onto flow direction array
- mintype = np.min_scalar_type(fdir.size)
- domain = np.arange(fdir.size, dtype=mintype)
- acc_i = np.zeros(fdir.size, dtype=float)
- try:
- invalid_cells = ((fdir < 0) | (fdir > (np.pi * 2)))
- if nodata_in is None:
- nodata_cells = np.zeros_like(fdir).astype(bool)
- else:
- if np.isnan(nodata_in):
- nodata_cells = (np.isnan(fdir))
- else:
- nodata_cells = (fdir == nodata_in)
- # Split d-infinity grid
- fdir_0, fdir_1, prop_0, prop_1 = self.angle_to_d8(fdir, dirmap=dirmap)
- # Ensure consistent types
- fdir_0 = fdir_0.astype(mintype)
- fdir_1 = fdir_1.astype(mintype)
- # Set nodata cells to zero
- fdir_0[nodata_cells | invalid_cells] = 0
- fdir_1[nodata_cells | invalid_cells] = 0
- # Get matching of start and end nodes
- startnodes, endnodes_0 = self._construct_matching(fdir_0, domain, dirmap=dirmap)
- _, endnodes_1 = self._construct_matching(fdir_1, domain, dirmap=dirmap)
- # Remove cycles
- self._remove_dinf_cycles(fdir_0, fdir_1, startnodes)
- # Initialize accumulation array
- if weights is not None:
- assert(weights.size == fdir.size)
- acc = weights.flatten().astype(float)
- else:
- acc = (~nodata_cells).ravel().astype(float)
-
- if efficiency is not None:
- assert(efficiency.size == fdir.size)
- eff = efficiency.flatten()
- eff_max, eff_min = np.max(eff), np.min(eff)
- assert((eff_max<=1) and (eff_min>=0))
-
- # Ensure no flow directions with zero proportion
- fdir_0.flat[prop_0 == 0] = fdir_1.flat[prop_0 == 0]
- fdir_1.flat[prop_1 == 0] = fdir_0.flat[prop_1 == 0]
- prop_0[prop_0 == 0] = 0.5
- prop_1[prop_0 == 0] = 0.5
- prop_0[prop_1 == 0] = 0.5
- prop_1[prop_1 == 0] = 0.5
- # Initialize indegree
- endnodes_0 = fdir_0.flat[startnodes]
- endnodes_1 = fdir_1.flat[startnodes]
- indegree_0 = pd.Series(prop_0[startnodes], index=endnodes_0).groupby(level=0).sum()
- indegree_1 = pd.Series(prop_1[startnodes], index=endnodes_1).groupby(level=0).sum()
- indegree = np.zeros(startnodes.size, dtype=float)
- indegree[indegree_0.index.values] += indegree_0.values
- indegree[indegree_1.index.values] += indegree_1.values
- del indegree_0
- del indegree_1
- # Remove self-cycles
- startnodes = startnodes[(~((startnodes == endnodes_0) &
- (startnodes == endnodes_1))) &
- (indegree == 0)]
- endnodes_0 = fdir_0.flat[startnodes]
- endnodes_1 = fdir_1.flat[startnodes]
- epsilon = 1e-8
- if efficiency is None:
- for _ in range(fdir.size):
- if (startnodes.any()):
- np.add.at(acc_i, endnodes_0, prop_0[startnodes]*acc[startnodes])
- np.add.at(acc_i, endnodes_1, prop_1[startnodes]*acc[startnodes])
- acc += acc_i
- acc_i.fill(0)
- np.subtract.at(indegree, endnodes_0, prop_0[startnodes])
- np.subtract.at(indegree, endnodes_1, prop_1[startnodes])
- startnodes = np.unique(np.concatenate([endnodes_0, endnodes_1]))
- startnodes = startnodes[np.abs(indegree[startnodes]) < epsilon]
- endnodes_0 = fdir_0.flat[startnodes]
- endnodes_1 = fdir_1.flat[startnodes]
- # TODO: This part is kind of gross
- startnodes = startnodes[~((startnodes == endnodes_0) &
- (startnodes == endnodes_1))]
- endnodes_0 = fdir_0.flat[startnodes]
- endnodes_1 = fdir_1.flat[startnodes]
- else:
- break
- else:
- for _ in range(fdir.size):
- if (startnodes.any()):
- np.add.at(acc_i, endnodes_0, prop_0[startnodes]*acc[startnodes] * eff[startnodes])
- np.add.at(acc_i, endnodes_1, prop_1[startnodes]*acc[startnodes] * eff[startnodes])
- acc += acc_i
- acc_i.fill(0)
- np.subtract.at(indegree, endnodes_0, prop_0[startnodes])
- np.subtract.at(indegree, endnodes_1, prop_1[startnodes])
- startnodes = np.unique(np.concatenate([endnodes_0, endnodes_1]))
- startnodes = startnodes[np.abs(indegree[startnodes]) < epsilon]
- endnodes_0 = fdir_0.flat[startnodes]
- endnodes_1 = fdir_1.flat[startnodes]
- # TODO: This part is kind of gross
- startnodes = startnodes[~((startnodes == endnodes_0) &
- (startnodes == endnodes_1))]
- endnodes_0 = fdir_0.flat[startnodes]
- endnodes_1 = fdir_1.flat[startnodes]
- else:
- break
- # TODO: Hacky: should probably fix this
- acc[0] = 1
- # Reshape and offset accumulation
- acc = np.reshape(acc, fdir.shape)
- if pad:
- acc = acc[1:-1, 1:-1]
- except:
- raise
- finally:
- # Clean up
- if nodata_in is not None:
- fdir[nodata_cells] = nodata_in
- if pad:
- fdir = fdir[1:-1, 1:-1]
- else:
- self._replace_rim(fdir, left, right, top, bottom)
- return self._output_handler(data=acc, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
- def _num_cycles(self, fdir, startnodes, max_cycle_len=10):
- cy = np.zeros(startnodes.size, dtype=np.min_scalar_type(max_cycle_len + 1))
- endnodes = fdir.flat[startnodes]
- for n in range(1, max_cycle_len + 1):
- check = ((startnodes == endnodes) & (cy == 0))
- cy[check] = n
- endnodes = fdir.flat[endnodes]
- return cy
-
- def _get_cycles(self, fdir, num_cycles, cycle_len=2):
- s = set(np.where(num_cycles == cycle_len)[0])
- cycles = []
- for _ in range(len(s)):
- if s:
- cycle = set()
- i = s.pop()
- cycle.add(i)
- n = 1
- for __ in range(cycle_len):
- i = fdir.flat[i]
- cycle.add(i)
- s.discard(i)
- if len(cycle) == n:
- cycles.append(cycle)
- break
- else:
- n += 1
- return cycles
-
- def _remove_dinf_cycles(self, fdir_0, fdir_1, startnodes, max_cycles=2):
- # Find number of cycles at each index
- cy_0 = self._num_cycles(fdir_0, startnodes, max_cycles)
- cy_1 = self._num_cycles(fdir_1, startnodes, max_cycles)
- # Handle double cycles
- double_cycles = ((cy_1 > 1) & (cy_0 > 1))
- fdir_0.flat[double_cycles] = np.where(double_cycles)[0]
- fdir_1.flat[double_cycles] = np.where(double_cycles)[0]
- cy_0[double_cycles] = 0
- cy_1[double_cycles] = 0
- # Remove cycles
- for cycle_len in reversed(range(2, max_cycles + 1)):
- cycles_0 = self._get_cycles(fdir_0, cy_0, cycle_len)
- cycles_1 = self._get_cycles(fdir_1, cy_1, cycle_len)
- for cycle in cycles_0:
- node = cycle.pop()
- fdir_0.flat[node] = fdir_1.flat[node]
- for cycle in cycles_1:
- node = cycle.pop()
- fdir_1.flat[node] = fdir_0.flat[node]
- # Look for remaining cycles
- cy_0 = self._num_cycles(fdir_0, startnodes, max_cycles)
- cy_1 = self._num_cycles(fdir_1, startnodes, max_cycles)
- fdir_0.flat[(cy_0 > 1)] = np.where(cy_0 > 0)[0]
- fdir_1.flat[(cy_1 > 1)] = np.where(cy_1 > 0)[0]
-
- def flow_distance(self, x, y, data, weights=None, dirmap=None, nodata_in=None,
- nodata_out=0, out_name='dist', routing='d8', method='shortest',
- inplace=True, xytype='index', apply_mask=True, ignore_metadata=False,
- snap='corner', **kwargs):
- """
- Generates an array representing the topological distance from each cell
- to the outlet.
-
- Parameters
- ----------
- x : int or float
- x coordinate of pour point
- y : int or float
- y coordinate of pour point
- data : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- weights: numpy ndarray
- Weights (distances) to apply to link edges.
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value to indicate nodata in output array.
- out_name : string
- Name of attribute containing new flow distance array.
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- 'dinf' : D-infinity flow directions
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- xytype : 'index' or 'label'
- How to interpret parameters 'x' and 'y'.
- 'index' : x and y represent the column and row
- indices of the pour point.
- 'label' : x and y represent geographic coordinates
- (will be passed to self.nearest_cell).
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
- snap : str
- Function to use on array for indexing:
- 'corner' : numpy.around()
- 'center' : numpy.floor()
- """
- if not _HAS_SCIPY:
- raise ImportError('flow_distance requires scipy.sparse module')
- dirmap = self._set_dirmap(dirmap, data)
- nodata_in = self._check_nodata_in(data, nodata_in)
- properties = {'nodata' : nodata_out}
- metadata = {}
- fdir = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=properties, ignore_metadata=ignore_metadata,
- **kwargs)
- xmin, ymin, xmax, ymax = fdir.bbox
- if xytype in ('label', 'coordinate'):
- if (x < xmin) or (x > xmax) or (y < ymin) or (y > ymax):
- raise ValueError('Pour point ({}, {}) is out of bounds for dataset with bbox {}.'
- .format(x, y, (xmin, ymin, xmax, ymax)))
- elif xytype == 'index':
- if (x < 0) or (y < 0) or (x >= fdir.shape[1]) or (y >= fdir.shape[0]):
- raise ValueError('Pour point ({}, {}) is out of bounds for dataset with shape {}.'
- .format(x, y, fdir.shape))
- if routing.lower() == 'd8':
- return self._d8_flow_distance(x, y, fdir, weights=weights, dirmap=dirmap,
- nodata_in=nodata_in, nodata_out=nodata_out,
- out_name=out_name, method=method, inplace=inplace,
- xytype=xytype, apply_mask=apply_mask,
- ignore_metadata=ignore_metadata,
- properties=properties, metadata=metadata,
- snap=snap, **kwargs)
- elif routing.lower() == 'dinf':
- return self._dinf_flow_distance(x, y, fdir, weights=weights, dirmap=dirmap,
- nodata_in=nodata_in, nodata_out=nodata_out,
- out_name=out_name, method=method, inplace=inplace,
- xytype=xytype, apply_mask=apply_mask,
- ignore_metadata=ignore_metadata,
- properties=properties, metadata=metadata,
- snap=snap, **kwargs)
-
- def _d8_flow_distance(self, x, y, fdir, weights=None, dirmap=None, nodata_in=None,
- nodata_out=0, out_name='dist', method='shortest', inplace=True,
- xytype='index', apply_mask=True, ignore_metadata=False, properties={},
- metadata={}, snap='corner', **kwargs):
- # Construct flat index onto flow direction array
- domain = np.arange(fdir.size)
- fdir_orig_type = fdir.dtype
- if nodata_in is None:
- nodata_cells = np.zeros_like(fdir).astype(bool)
- else:
- if np.isnan(nodata_in):
- nodata_cells = (np.isnan(fdir))
- else:
- nodata_cells = (fdir == nodata_in)
- try:
- mintype = np.min_scalar_type(fdir.size)
- fdir = fdir.astype(mintype)
- domain = domain.astype(mintype)
- startnodes, endnodes = self._construct_matching(fdir, domain,
- dirmap=dirmap)
- if xytype == 'label':
- x, y = self.nearest_cell(x, y, fdir.affine, snap)
- # TODO: Currently the size of weights is hard to understand
- if weights is not None:
- weights = weights.ravel()
- assert(weights.size == startnodes.size)
- assert(weights.size == endnodes.size)
- else:
- assert(startnodes.size == endnodes.size)
- weights = (~nodata_cells).ravel().astype(int)
- C = scipy.sparse.lil_matrix((fdir.size, fdir.size))
- for i,j,w in zip(startnodes, endnodes, weights):
- C[i,j] = w
- C = C.tocsr()
- xyindex = np.ravel_multi_index((y, x), fdir.shape)
- dist = csgraph.shortest_path(C, indices=[xyindex], directed=False)
- dist[~np.isfinite(dist)] = nodata_out
- dist = dist.ravel()
- dist = dist.reshape(fdir.shape)
- except:
- raise
- finally:
- self._unflatten_fdir(fdir, domain, dirmap)
- fdir = fdir.astype(fdir_orig_type)
- # Prepare output
- return self._output_handler(data=dist, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
- def _dinf_flow_distance(self, x, y, fdir, weights=None, dirmap=None, nodata_in=None,
- nodata_out=0, out_name='dist', method='shortest', inplace=True,
- xytype='index', apply_mask=True, ignore_metadata=False,
- properties={}, metadata={}, snap='corner', **kwargs):
- # Filter warnings due to invalid values
- np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
- category=RuntimeWarning)
- # Construct flat index onto flow direction array
- mintype = np.min_scalar_type(fdir.size)
- domain = np.arange(fdir.size, dtype=mintype)
- fdir_orig_type = fdir.dtype
- try:
- invalid_cells = ((fdir < 0) | (fdir > (np.pi * 2)))
- if nodata_in is None:
- nodata_cells = np.zeros_like(fdir).astype(bool)
- else:
- if np.isnan(nodata_in):
- nodata_cells = (np.isnan(fdir))
- else:
- nodata_cells = (fdir == nodata_in)
- # Split d-infinity grid
- fdir_0, fdir_1, prop_0, prop_1 = self.angle_to_d8(fdir, dirmap=dirmap)
- # Ensure consistent types
- fdir_0 = fdir_0.astype(mintype)
- fdir_1 = fdir_1.astype(mintype)
- # Set nodata cells to zero
- fdir_0[nodata_cells | invalid_cells] = 0
- fdir_1[nodata_cells | invalid_cells] = 0
- # Get matching of start and end nodes
- startnodes, endnodes_0 = self._construct_matching(fdir_0, domain, dirmap=dirmap)
- _, endnodes_1 = self._construct_matching(fdir_1, domain, dirmap=dirmap)
- del fdir_0
- del fdir_1
- assert(startnodes.size == endnodes_0.size)
- assert(startnodes.size == endnodes_1.size)
- if xytype == 'label':
- x, y = self.nearest_cell(x, y, fdir.affine, snap)
- # TODO: Currently the size of weights is hard to understand
- if weights is not None:
- if isinstance(weights, list) or isinstance(weights, tuple):
- assert(isinstance(weights[0], np.ndarray))
- weights_0 = weights[0].ravel()
- assert(isinstance(weights[1], np.ndarray))
- weights_1 = weights[1].ravel()
- assert(weights_0.size == startnodes.size)
- assert(weights_1.size == startnodes.size)
- elif isinstance(weights, np.ndarray):
- assert(weights.shape[0] == startnodes.size)
- assert(weights.shape[1] == 2)
- weights_0 = weights[:,0]
- weights_1 = weights[:,1]
- else:
- weights_0 = (~nodata_cells).ravel().astype(int)
- weights_1 = weights_0
- if method.lower() == 'shortest':
- C = scipy.sparse.lil_matrix((fdir.size, fdir.size))
- for i, j_0, j_1, w_0, w_1 in zip(startnodes, endnodes_0, endnodes_1,
- weights_0, weights_1):
- C[i,j_0] = w_0
- C[i,j_1] = w_1
- C = C.tocsr()
- xyindex = np.ravel_multi_index((y, x), fdir.shape)
- dist = csgraph.shortest_path(C, indices=[xyindex], directed=False)
- dist[~np.isfinite(dist)] = nodata_out
- dist = dist.ravel()
- dist = dist.reshape(fdir.shape)
- else:
- raise NotImplementedError("Only implemented for shortest path distance.")
- except:
- raise
- # Prepare output
- return self._output_handler(data=dist, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
- def compute_hand(self, fdir, dem, drainage_mask, out_name='hand', dirmap=None,
- nodata_in_fdir=None, nodata_in_dem=None, nodata_out=np.nan, routing='d8',
- inplace=True, apply_mask=False, ignore_metadata=False, return_index=False,
- **kwargs):
- """
- Computes the height above nearest drainage (HAND), based on a flow direction grid,
- a digital elevation grid, and a grid containing the locations of drainage channels.
-
- Parameters
- ----------
- fdir : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- dem : str or Raster
- Digital elevation data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- drainage_mask : str or Raster
- Boolean raster or ndarray with nonzero elements indicating
- locations of drainage channels.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- out_name : string
- Name of attribute containing new catchment array.
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- nodata_in_fdir : int or float
- Value to indicate nodata in flow direction input array.
- nodata_in_dem : int or float
- Value to indicate nodata in digital elevation input array.
- nodata_out : int or float
- Value to indicate nodata in output array.
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- 'dinf' : D-infinity flow directions (not implemented)
- recursionlimit : int
- Recursion limit--may need to be raised if
- recursion limit is reached.
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and crs.
- """
- # TODO: Why does this use set_dirmap but flowdir doesn't?
- dirmap = self._set_dirmap(dirmap, fdir)
- nodata_in_fdir = self._check_nodata_in(fdir, nodata_in_fdir)
- nodata_in_dem = self._check_nodata_in(dem, nodata_in_dem)
- properties = {'nodata' : nodata_out}
- # TODO: This will overwrite metadata if provided
- metadata = {'dirmap' : dirmap}
- # initialize array to collect catchment cells
- fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=nodata_in_fdir,
- properties=properties, ignore_metadata=ignore_metadata,
- **kwargs)
- dem = self._input_handler(dem, apply_mask=apply_mask, nodata_view=nodata_in_dem,
- properties=properties, ignore_metadata=ignore_metadata,
- **kwargs)
- mask = self._input_handler(drainage_mask, apply_mask=apply_mask, nodata_view=0,
- properties=properties, ignore_metadata=ignore_metadata,
- **kwargs)
- assert (np.asarray(dem.shape) == np.asarray(fdir.shape)).all()
- assert (np.asarray(dem.shape) == np.asarray(mask.shape)).all()
- if routing.lower() == 'dinf':
- try:
- # Split dinf flowdir
- fdir_0, fdir_1, prop_0, prop_1 = self.angle_to_d8(fdir, dirmap=dirmap)
- # Find invalid cells
- invalid_cells = ((fdir < 0) | (fdir > (np.pi * 2)))
- # Pad the rim
- dirleft_0, dirright_0, dirtop_0, dirbottom_0 = self._pop_rim(fdir_0,
- nodata=nodata_in_fdir)
- dirleft_1, dirright_1, dirtop_1, dirbottom_1 = self._pop_rim(fdir_1,
- nodata=nodata_in_fdir)
- maskleft, maskright, masktop, maskbottom = self._pop_rim(mask, nodata=0)
- mask = mask.ravel()
- # Ensure proportion of flow is never zero
- fdir_0.flat[prop_0 == 0] = fdir_1.flat[prop_0 == 0]
- fdir_1.flat[prop_1 == 0] = fdir_0.flat[prop_1 == 0]
- # Set nodata cells to zero
- fdir_0[invalid_cells] = 0
- fdir_1[invalid_cells] = 0
- # Create indexing arrays for convenience
- visited = np.zeros(fdir.size, dtype=np.bool)
- # nvisited = np.zeros(fdir.size, dtype=int)
- r_dirmap = np.array(dirmap)[[4, 5, 6, 7, 0, 1, 2, 3]].tolist()
- source = np.flatnonzero(mask)
- hand = -np.ones(fdir.size, dtype=np.int)
- hand[source] = source
- visited[source] = True
- # nvisited[source] += 1
- for _ in range(fdir.size):
- selection = self._select_surround_ravel(source, fdir.shape)
- ix = (((fdir_0.flat[selection] == r_dirmap) |
- (fdir_1.flat[selection] == r_dirmap)) &
- (hand.flat[selection] < 0) &
- (~visited.flat[selection])
- )
- # TODO: Not optimized (a lot of copying here)
- parent = np.tile(source, (len(dirmap), 1)).T[ix]
- child = selection[ix]
- if not child.size:
- break
- visited.flat[child] = True
- hand[child] = hand[parent]
- source = np.unique(child)
- hand = hand.reshape(dem.shape)
- if not return_index:
- hand = np.where(hand != -1, dem - dem.flat[hand], nodata_out)
- except:
- raise
- finally:
- mask = mask.reshape(dem.shape)
- self._replace_rim(fdir_0, dirleft_0, dirright_0, dirtop_0, dirbottom_0)
- self._replace_rim(fdir_1, dirleft_1, dirright_1, dirtop_1, dirbottom_1)
- self._replace_rim(mask, maskleft, maskright, masktop, maskbottom)
- return self._output_handler(data=hand, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
- elif routing.lower() == 'd8':
- try:
- dirleft, dirright, dirtop, dirbottom = self._pop_rim(fdir, nodata=nodata_in_fdir)
- maskleft, maskright, masktop, maskbottom = self._pop_rim(mask, nodata=0)
- mask = mask.ravel()
- r_dirmap = np.array(dirmap)[[4, 5, 6, 7, 0, 1, 2, 3]].tolist()
- source = np.flatnonzero(mask)
- hand = -np.ones(fdir.size, dtype=np.int)
- hand[source] = source
- for _ in range(fdir.size):
- selection = self._select_surround_ravel(source, fdir.shape)
- ix = (fdir.flat[selection] == r_dirmap) & (hand.flat[selection] < 0)
- # TODO: Not optimized (a lot of copying here)
- parent = np.tile(source, (len(dirmap), 1)).T[ix]
- child = selection[ix]
- if not child.size:
- break
- hand[child] = hand[parent]
- source = child
- hand = hand.reshape(dem.shape)
- if not return_index:
- hand = np.where(hand != -1, dem - dem.flat[hand], nodata_out)
- except:
- raise
- finally:
- mask = mask.reshape(dem.shape)
- self._replace_rim(fdir, dirleft, dirright, dirtop, dirbottom)
- self._replace_rim(mask, maskleft, maskright, masktop, maskbottom)
- return self._output_handler(data=hand, out_name=out_name, properties=properties,
- inplace=inplace, metadata=metadata)
-
-
- def cell_area(self, out_name='area', nodata_out=0, inplace=True, as_crs=None):
- """
- Generates an array representing the area of each cell to the outlet.
-
- Parameters
- ----------
- out_name : string
- Name of attribute containing new cell area array.
- nodata_out : int or float
- Value to indicate nodata in output array.
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- as_crs : pyproj.Proj
- CRS at which to compute the area of each cell.
- """
- if as_crs is None:
- if getattr(_pyproj_crs(self.crs), _pyproj_crs_is_geographic):
- warnings.warn(('CRS is geographic. Area will not have meaningful '
- 'units.'))
- else:
- if getattr(_pyproj_crs(as_crs), _pyproj_crs_is_geographic):
- warnings.warn(('CRS is geographic. Area will not have meaningful '
- 'units.'))
- indices = np.vstack(np.dstack(np.meshgrid(*self.grid_indices(),
- indexing='ij')))
- # TODO: Add to_crs conversion here
- if as_crs:
- indices = self._convert_grid_indices_crs(indices, self.crs, as_crs)
- dyy, dyx = np.gradient(indices[:, 0].reshape(self.shape))
- dxy, dxx = np.gradient(indices[:, 1].reshape(self.shape))
- dy = np.sqrt(dyy**2 + dyx**2)
- dx = np.sqrt(dxy**2 + dxx**2)
- area = dx * dy
- metadata = {}
- private_props = {'nodata' : nodata_out}
- grid_props = self._generate_grid_props(**private_props)
- return self._output_handler(data=area, out_name=out_name, properties=grid_props,
- inplace=inplace, metadata=metadata)
-
- def cell_distances(self, data, out_name='cdist', dirmap=None, nodata_in=None, nodata_out=0,
- routing='d8', inplace=True, as_crs=None, apply_mask=True,
- ignore_metadata=False):
- """
- Generates an array representing the distance from each cell to its downstream neighbor.
-
- Parameters
- ----------
- data : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- out_name : string
- Name of attribute containing new cell distance array.
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value to indicate nodata in output array.
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- as_crs : pyproj.Proj
- CRS at which to compute the distance from each cell to its downstream neighbor.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
- """
- if routing.lower() != 'd8':
- raise NotImplementedError('Only implemented for D8 routing.')
- if as_crs is None:
- if getattr(_pyproj_crs(self.crs), _pyproj_crs_is_geographic):
- warnings.warn(('CRS is geographic. Area will not have meaningful '
- 'units.'))
- else:
- if getattr(_pyproj_crs(as_crs), _pyproj_crs_is_geographic):
- warnings.warn(('CRS is geographic. Area will not have meaningful '
- 'units.'))
- indices = np.vstack(np.dstack(np.meshgrid(*self.grid_indices(),
- indexing='ij')))
- if as_crs:
- indices = self._convert_grid_indices_crs(indices, self.crs, as_crs)
- dirmap = self._set_dirmap(dirmap, data)
- nodata_in = self._check_nodata_in(data, nodata_in)
- grid_props = {'nodata' : nodata_out}
- metadata = {}
- fdir = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=grid_props, ignore_metadata=ignore_metadata)
- dyy, dyx = np.gradient(indices[:, 0].reshape(self.shape))
- dxy, dxx = np.gradient(indices[:, 1].reshape(self.shape))
- dy = np.sqrt(dyy**2 + dyx**2)
- dx = np.sqrt(dxy**2 + dxx**2)
- ddiag = np.sqrt(dy**2 + dx**2)
- cdist = np.zeros(self.shape)
- for i, direction in enumerate(dirmap):
- if i in (0, 4):
- cdist[fdir == direction] = dy[fdir == direction]
- elif i in (2, 6):
- cdist[fdir == direction] = dx[fdir == direction]
- else:
- cdist[fdir == direction] = ddiag[fdir == direction]
- # Prepare output
- return self._output_handler(data=cdist, out_name=out_name, properties=grid_props,
- inplace=inplace, metadata=metadata)
-
- def cell_dh(self, fdir, dem, out_name='dh', dirmap=None, nodata_in=None,
- nodata_out=np.nan, routing='d8', inplace=True, apply_mask=True,
- ignore_metadata=False):
- """
- Generates an array representing the elevation difference from each cell to its
- downstream neighbor.
-
- Parameters
- ----------
- fdir : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- dem : str or Raster
- DEM data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- out_name : string
- Name of attribute containing new cell elevation difference array.
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value to indicate nodata in output array.
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
- """
- if routing.lower() != 'd8':
- raise NotImplementedError('Only implemented for D8 routing.')
- nodata_in = self._check_nodata_in(fdir, nodata_in)
- fdir_props = {'nodata' : nodata_out}
- fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=fdir_props, ignore_metadata=ignore_metadata)
- nodata_in = self._check_nodata_in(dem, nodata_in)
- dem_props = {'nodata' : nodata_out}
- metadata = {}
- dem = self._input_handler(dem, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=dem_props, ignore_metadata=ignore_metadata)
- try:
- assert(fdir.affine == dem.affine)
- assert(fdir.shape == dem.shape)
- except:
- raise ValueError('Flow direction and elevation grids not aligned.')
- dirmap = self._set_dirmap(dirmap, fdir)
- flat_idx = np.arange(fdir.size)
- fdir_orig_type = fdir.dtype
- if nodata_in is None:
- nodata_cells = np.zeros_like(fdir).astype(bool)
- else:
- if np.isnan(nodata_in):
- nodata_cells = (np.isnan(fdir))
- else:
- nodata_cells = (fdir == nodata_in)
- try:
- mintype = np.min_scalar_type(fdir.size)
- fdir = fdir.astype(mintype)
- flat_idx = flat_idx.astype(mintype)
- startnodes, endnodes = self._construct_matching(fdir, flat_idx, dirmap)
- startelev = dem.ravel()[startnodes].astype(np.float64)
- endelev = dem.ravel()[endnodes].astype(np.float64)
- dh = (startelev - endelev).reshape(self.shape)
- dh[nodata_cells] = nodata_out
- except:
- raise
- finally:
- self._unflatten_fdir(fdir, flat_idx, dirmap)
- fdir = fdir.astype(fdir_orig_type)
- # Prepare output
- private_props = {'nodata' : nodata_out}
- grid_props = self._generate_grid_props(**private_props)
- return self._output_handler(data=dh, out_name=out_name, properties=grid_props,
- inplace=inplace, metadata=metadata)
-
- def cell_slopes(self, fdir, dem, out_name='slopes', dirmap=None, nodata_in=None,
- nodata_out=np.nan, routing='d8', as_crs=None, inplace=True, apply_mask=True,
- ignore_metadata=False):
- """
- Generates an array representing the slope from each cell to its downstream neighbor.
-
- Parameters
- ----------
- fdir : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- dem : str or Raster
- DEM data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- out_name : string
- Name of attribute containing new cell slope array.
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value to indicate nodata in output array.
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- as_crs : pyproj.Proj
- CRS at which to compute the distance from each cell to its downstream neighbor.
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
- """
- # Filter warnings due to invalid values
- np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
- category=RuntimeWarning)
- np.warnings.filterwarnings(action='ignore', message='divide by zero',
- category=RuntimeWarning)
- if routing.lower() != 'd8':
- raise NotImplementedError('Only implemented for D8 routing.')
- dh = self.cell_dh(fdir, dem, out_name, inplace=False,
- nodata_out=nodata_out, dirmap=dirmap)
- cdist = self.cell_distances(fdir, inplace=False, as_crs=as_crs)
- if apply_mask:
- slopes = np.where(self.mask, dh/cdist, nodata_out)
- else:
- slopes = dh/cdist
- # Prepare output
- metadata = {}
- private_props = {'nodata' : nodata_out}
- grid_props = self._generate_grid_props(**private_props)
- return self._output_handler(data=slopes, out_name=out_name, properties=grid_props,
- inplace=inplace, metadata=metadata)
-
- def _check_nodata_in(self, data, nodata_in, override=None):
- if nodata_in is None:
- if isinstance(data, str):
- try:
- nodata_in = getattr(self, data).viewfinder.nodata
- except:
- raise NameError("nodata value for '{0}' not found in instance."
- .format(data))
- elif isinstance(data, Raster):
- try:
- nodata_in = data.nodata
- except:
- raise NameError("nodata value for Raster not found.")
- if override is not None:
- nodata_in = override
- return nodata_in
-
- def _input_handler(self, data, apply_mask=True, nodata_view=None, properties={},
- ignore_metadata=False, inherit_metadata=True, metadata={}, **kwargs):
- required_params = ('affine', 'shape', 'nodata', 'crs')
- defaults = self.defaults
- # Handle raster data
- if (isinstance(data, Raster)):
- for param in required_params:
- if not param in properties:
- if param in kwargs:
- properties[param] = kwargs[param]
- else:
- properties[param] = getattr(data, param)
- if inherit_metadata:
- metadata.update(data.metadata)
- viewfinder = RegularViewFinder(**properties)
- dataset = Raster(data, viewfinder, metadata=metadata)
- return dataset
- # Handle raw data
- if (isinstance(data, np.ndarray)):
- for param in required_params:
- if not param in properties:
- if param in kwargs:
- properties[param] = kwargs[param]
- elif ignore_metadata:
- properties[param] = defaults[param]
- else:
- raise KeyError("Missing required parameter: {0}"
- .format(param))
- viewfinder = RegularViewFinder(**properties)
- dataset = Raster(data, viewfinder, metadata=metadata)
- return dataset
- # Handle named dataset
- elif isinstance(data, str):
- for param in required_params:
- if not param in properties:
- if param in kwargs:
- properties[param] = kwargs[param]
- elif hasattr(self, param):
- properties[param] = getattr(self, param)
- elif ignore_metadata:
- properties[param] = defaults[param]
- else:
- raise KeyError("Missing required parameter: {0}"
- .format(param))
- viewfinder = RegularViewFinder(**properties)
- data = self.view(data, apply_mask=apply_mask, nodata=nodata_view)
- if inherit_metadata:
- metadata.update(data.metadata)
- dataset = Raster(data, viewfinder, metadata=metadata)
- return dataset
- else:
- raise TypeError('Data must be a Raster, numpy ndarray or name string.')
-
- def _output_handler(self, data, out_name, properties, inplace, metadata={}):
- # TODO: Should this be rolled into add_data?
- viewfinder = RegularViewFinder(**properties)
- dataset = Raster(data, viewfinder, metadata=metadata)
- if inplace:
- setattr(self, out_name, dataset)
- self.grids.append(out_name)
- else:
- return dataset
-
- def _generate_grid_props(self, **kwargs):
- properties = {}
- required = ('affine', 'shape', 'nodata', 'crs')
- properties.update(kwargs)
- for param in required:
- properties[param] = properties.setdefault(param,
- getattr(self, param))
- return properties
-
- def _pop_rim(self, data, nodata=0):
- # TODO: Does this default make sense?
- if nodata is None:
- nodata = 0
- left, right, top, bottom = (data[:,0].copy(), data[:,-1].copy(),
- data[0,:].copy(), data[-1,:].copy())
- data[:,0] = nodata
- data[:,-1] = nodata
- data[0,:] = nodata
- data[-1,:] = nodata
- return left, right, top, bottom
-
- def _replace_rim(self, data, left, right, top, bottom):
- data[:,0] = left
- data[:,-1] = right
- data[0,:] = top
- data[-1,:] = bottom
- return None
-
- def _dy_dx(self):
- x0, y0, x1, y1 = self.bbox
- dy = np.abs(y1 - y0) / (self.shape[0]) #TODO: Should this be shape - 1?
- dx = np.abs(x1 - x0) / (self.shape[1]) #TODO: Should this be shape - 1?
- return dy, dx
-
- # def _convert_bbox_crs(self, bbox, old_crs, new_crs):
- # # TODO: Won't necessarily work in every case as ur might be lower than
- # # ul
- # x1 = np.asarray((bbox[0], bbox[2]))
- # y1 = np.asarray((bbox[1], bbox[3]))
- # x2, y2 = pyproj.transform(old_crs, new_crs,
- # x1, y1)
- # new_bbox = (x2[0], y2[0], x2[1], y2[1])
- # return new_bbox
-
- def _convert_grid_indices_crs(self, grid_indices, old_crs, new_crs):
- if _OLD_PYPROJ:
- x2, y2 = pyproj.transform(old_crs, new_crs, grid_indices[:,1],
- grid_indices[:,0])
- else:
- x2, y2 = pyproj.transform(old_crs, new_crs, grid_indices[:,1],
- grid_indices[:,0], errcheck=True,
- always_xy=True)
- yx2 = np.column_stack([y2, x2])
- return yx2
-
- # def _convert_outer_indices_crs(self, affine, shape, old_crs, new_crs):
- # y1, x1 = self.grid_indices(affine=affine, shape=shape)
- # lx, _ = pyproj.transform(old_crs, new_crs,
- # x1, np.repeat(y1[0], len(x1)))
- # rx, _ = pyproj.transform(old_crs, new_crs,
- # x1, np.repeat(y1[-1], len(x1)))
- # __, by = pyproj.transform(old_crs, new_crs,
- # np.repeat(x1[0], len(y1)), y1)
- # __, uy = pyproj.transform(old_crs, new_crs,
- # np.repeat(x1[-1], len(y1)), y1)
- # return by, uy, lx, rx
-
- def _flatten_fdir(self, fdir, flat_idx, dirmap, copy=False):
- # WARNING: This modifies fdir in place if copy is set to False!
- if copy:
- fdir = fdir.copy()
- shape = fdir.shape
- go_to = (
- 0 - shape[1],
- 1 - shape[1],
- 1 + 0,
- 1 + shape[1],
- 0 + shape[1],
- -1 + shape[1],
- -1 + 0,
- -1 - shape[1]
- )
- gotomap = dict(zip(dirmap, go_to))
- for k, v in gotomap.items():
- fdir[fdir == k] = v
- fdir.flat[flat_idx] += flat_idx
-
- def _unflatten_fdir(self, fdir, flat_idx, dirmap):
- shape = fdir.shape
- go_to = (
- 0 - shape[1],
- 1 - shape[1],
- 1 + 0,
- 1 + shape[1],
- 0 + shape[1],
- -1 + shape[1],
- -1 + 0,
- -1 - shape[1]
- )
- gotomap = dict(zip(go_to, dirmap))
- fdir.flat[flat_idx] -= flat_idx
- for k, v in gotomap.items():
- fdir[fdir == k] = v
-
- def _construct_matching(self, fdir, flat_idx, dirmap, fdir_flattened=False):
- # TODO: Maybe fdir should be flattened outside this function
- if not fdir_flattened:
- self._flatten_fdir(fdir, flat_idx, dirmap)
- startnodes = flat_idx
- endnodes = fdir.flat[flat_idx]
- return startnodes, endnodes
-
- def clip_to(self, data_name, precision=7, inplace=True, apply_mask=True,
- pad=(0,0,0,0)):
- """
- Clip grid to bbox representing the smallest area that contains all
- non-null data for a given dataset. If inplace is True, will set
- self.bbox to the bbox generated by this method.
-
- Parameters
- ----------
- data_name : str
- Name of attribute to base the clip on.
- precision : int
- Precision to use when matching geographic coordinates.
- inplace : bool
- If True, update current view (self.affine and self.shape) to
- conform to clip.
- apply_mask : bool
- If True, update self.mask based on nonzero values of .
- pad : tuple of int (length 4)
- Apply padding to edges of new view (left, bottom, right, top). A pad of
- (1,1,1,1), for instance, will add a one-cell rim around the new view.
- """
- # get class attributes
- data = getattr(self, data_name)
- nodata = data.nodata
- # get bbox of nonzero entries
- if np.isnan(data.nodata):
- mask = (~np.isnan(data))
- nz = np.nonzero(mask)
- else:
- mask = (data != nodata)
- nz = np.nonzero(mask)
- # TODO: Something is messed up with the padding
- yi_min = nz[0].min() - pad[1]
- yi_max = nz[0].max() + pad[3]
- xi_min = nz[1].min() - pad[0]
- xi_max = nz[1].max() + pad[2]
- xul, yul = data.affine * (xi_min, yi_min)
- xlr, ylr = data.affine * (xi_max + 1, yi_max + 1)
- # if inplace is True, clip all grids to new bbox and set self.bbox
- if inplace:
- new_affine = Affine(data.affine.a, data.affine.b, xul,
- data.affine.d, data.affine.e, yul)
- ncols, nrows = ~new_affine * (xlr, ylr)
- np.testing.assert_almost_equal(nrows, round(nrows), decimal=precision)
- np.testing.assert_almost_equal(ncols, round(ncols), decimal=precision)
- ncols, nrows = np.around([ncols, nrows]).astype(int)
- self.affine = new_affine
- self.shape = (nrows, ncols)
- self.crs = data.crs
- if apply_mask:
- mask = np.pad(mask, ((pad[1], pad[3]),(pad[0], pad[2])), mode='constant',
- constant_values=0).astype(bool)
- self.mask = mask[yi_min + pad[1] : yi_max + pad[3] + 1,
- xi_min + pad[0] : xi_max + pad[2] + 1]
- else:
- self.mask = np.ones((nrows, ncols)).astype(bool)
- else:
- # if inplace is False, return the clipped data
- # TODO: This will fail if there is padding because of negative index
- return data[yi_min:yi_max+1, xi_min:xi_max+1]
-
- @property
- def bbox(self):
- shape = self.shape
- xmin, ymax = self.affine * (0,0)
- xmax, ymin = self.affine * (shape[1] + 1, shape[0] + 1)
- _bbox = (xmin, ymin, xmax, ymax)
- return _bbox
-
- @property
- def size(self):
- return np.prod(self.shape)
-
- @property
- def extent(self):
- bbox = self.bbox
- extent = (self.bbox[0], self.bbox[2], self.bbox[1], self.bbox[3])
- return extent
-
- @property
- def crs(self):
- return self._crs
-
- @crs.setter
- def crs(self, new_crs):
- assert isinstance(new_crs, pyproj.Proj)
- self._crs = new_crs
-
- @property
- def affine(self):
- return self._affine
-
- @affine.setter
- def affine(self, new_affine):
- assert isinstance(new_affine, Affine)
- self._affine = new_affine
-
- @property
- def cellsize(self):
- dy, dx = self._dy_dx()
- # TODO: Assuming square cells
- cellsize = (dy + dx) / 2
- return cellsize
-
- def set_nodata(self, data_name, new_nodata, old_nodata=None):
- """
- Change nodata value of a dataset.
-
- Parameters
- ----------
- data_name : string
- Attribute name of dataset to change.
- new_nodata : int or float
- New nodata value to use.
- old_nodata : int or float (optional)
- If none provided, defaults to
- self..
- """
- if old_nodata is None:
- old_nodata = getattr(self, data_name).nodata
- data = getattr(self, data_name)
- if np.isnan(old_nodata):
- np.place(data, np.isnan(data), new_nodata)
- else:
- np.place(data, data == old_nodata, new_nodata)
- data.nodata = new_nodata
-
- def to_ascii(self, data_name, file_name, view=True, delimiter=' ', fmt=None,
- apply_mask=False, nodata=None, interpolation='nearest',
- as_crs=None, kx=3, ky=3, s=0, tolerance=1e-3, dtype=None,
- **kwargs):
- """
- Writes gridded data to ascii grid files.
-
- Parameters
- ----------
- data_name : str
- Attribute name of dataset to write.
- file_name : str
- Name of file to write to.
- view : bool
- If True, writes the "view" of the dataset. Otherwise, writes the
- entire dataset.
- delimiter : string (optional)
- Delimiter to use in output file (defaults to ' ')
- fmt : str
- Formatting for numeric data. Passed to np.savetxt.
- apply_mask : bool
- If True, write the "masked" view of the dataset.
- nodata : int or float
- Value indicating no data in output array.
- Defaults to the `nodata` attribute of the input dataset.
- interpolation: 'nearest', 'linear', 'cubic', 'spline'
- Interpolation method to be used. If both the input data
- view and output data view can be defined on a regular grid,
- all interpolation methods are available. If one
- of the datasets cannot be defined on a regular grid, or the
- datasets use a different CRS, only 'nearest', 'linear' and
- 'cubic' are available.
- as_crs: pyproj.Proj
- Projection at which to view the data (overrides self.crs).
- kx, ky: int
- Degrees of the bivariate spline, if 'spline' interpolation is desired.
- s : float
- Smoothing factor of the bivariate spline, if 'spline' interpolation is desired.
- tolerance: float
- Maximum tolerance when matching coordinates. Data coordinates
- that cannot be matched to a target coordinate within this
- tolerance will be masked with the nodata value in the output array.
- dtype: numpy datatype
- Desired datatype of the output array.
- """
- header_space = 9*' '
- # TODO: Should probably replace with input handler to remain consistent
- if view:
- data = self.view(data_name, apply_mask=apply_mask, nodata=nodata,
- interpolation=interpolation, as_crs=as_crs, kx=kx, ky=ky, s=s,
- tolerance=tolerance, dtype=dtype, **kwargs)
- else:
- data = getattr(self, data_name)
- nodata = data.nodata
- shape = data.shape
- bbox = data.bbox
- # TODO: This breaks if cells are not square; issue with ASCII format
- cellsize = data.cellsize
- header = (("ncols{0}{1}\nnrows{0}{2}\nxllcorner{0}{3}\n"
- "yllcorner{0}{4}\ncellsize{0}{5}\nNODATA_value{0}{6}")
- .format(header_space,
- shape[1],
- shape[0],
- bbox[0],
- bbox[1],
- cellsize,
- nodata))
- if fmt is None:
- if np.issubdtype(data.dtype, np.integer):
- fmt = '%d'
- else:
- fmt = '%.18e'
- np.savetxt(file_name, data, fmt=fmt, delimiter=delimiter, header=header, comments='')
-
- def to_raster(self, data_name, file_name, profile=None, view=True, blockxsize=256,
- blockysize=256, apply_mask=False, nodata=None, interpolation='nearest',
- as_crs=None, kx=3, ky=3, s=0, tolerance=1e-3, dtype=None, **kwargs):
- """
- Writes gridded data to a raster.
-
- Parameters
- ----------
- data_name : str
- Attribute name of dataset to write.
- file_name : str
- Name of file to write to.
- profile : dict
- Profile of driver for writing data. See rasterio documentation.
- view : bool
- If True, writes the "view" of the dataset. Otherwise, writes the
- entire dataset.
- blockxsize : int
- Size of blocks in horizontal direction. See rasterio documentation.
- blockysize : int
- Size of blocks in vertical direction. See rasterio documentation.
- apply_mask : bool
- If True, write the "masked" view of the dataset.
- nodata : int or float
- Value indicating no data in output array.
- Defaults to the `nodata` attribute of the input dataset.
- interpolation: 'nearest', 'linear', 'cubic', 'spline'
- Interpolation method to be used. If both the input data
- view and output data view can be defined on a regular grid,
- all interpolation methods are available. If one
- of the datasets cannot be defined on a regular grid, or the
- datasets use a different CRS, only 'nearest', 'linear' and
- 'cubic' are available.
- as_crs: pyproj.Proj
- Projection at which to view the data (overrides self.crs).
- kx, ky: int
- Degrees of the bivariate spline, if 'spline' interpolation is desired.
- s : float
- Smoothing factor of the bivariate spline, if 'spline' interpolation is desired.
- tolerance: float
- Maximum tolerance when matching coordinates. Data coordinates
- that cannot be matched to a target coordinate within this
- tolerance will be masked with the nodata value in the output array.
- dtype: numpy datatype
- Desired datatype of the output array.
- """
- # TODO: Should probably replace with input handler to remain consistent
- if view:
- data = self.view(data_name, apply_mask=apply_mask, nodata=nodata,
- interpolation=interpolation, as_crs=as_crs, kx=kx, ky=ky, s=s,
- tolerance=tolerance, dtype=dtype, **kwargs)
- else:
- data = getattr(self, data_name)
- height, width = data.shape
- default_blockx = width
- default_profile = {
- 'driver' : 'GTiff',
- 'blockxsize' : blockxsize,
- 'blockysize' : blockysize,
- 'count': 1,
- 'tiled' : True
- }
- if not profile:
- profile = default_profile
- profile_updates = {
- 'crs' : data.crs.srs,
- 'transform' : data.affine,
- 'dtype' : data.dtype.name,
- 'nodata' : data.nodata,
- 'height' : height,
- 'width' : width
- }
- profile.update(profile_updates)
- with rasterio.open(file_name, 'w', **profile) as dst:
- dst.write(np.asarray(data), 1)
-
- def extract_profiles(self, fdir, mask, dirmap=None, nodata_in=None, routing='d8',
- apply_mask=True, ignore_metadata=False, **kwargs):
- """
- Generates river profiles from flow_direction and mask arrays.
-
- Parameters
- ----------
- fdir : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- mask : np.ndarray or Raster
- Boolean array indicating channelized regions
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- nodata_in : int or float
- Value to indicate nodata in input array.
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
-
- Returns
- -------
- profiles : np.ndarray
- Array of channel profiles
- connections : dict
- Dictionary containing connections between channel profiles
- """
- if routing.lower() != 'd8':
- raise NotImplementedError('Only implemented for D8 routing.')
- # TODO: If two "forks" are directly connected, it can introduce a gap
- fdir_nodata_in = self._check_nodata_in(fdir, nodata_in)
- mask_nodata_in = self._check_nodata_in(mask, nodata_in)
- fdir_props = {}
- mask_props = {}
- fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=fdir_nodata_in,
- properties=fdir_props,
- ignore_metadata=ignore_metadata, **kwargs)
- mask = self._input_handler(mask, apply_mask=apply_mask, nodata_view=mask_nodata_in,
- properties=mask_props,
- ignore_metadata=ignore_metadata, **kwargs)
- try:
- assert(fdir.shape == mask.shape)
- assert(fdir.affine == mask.affine)
- except:
- raise ValueError('Flow direction and accumulation grids not aligned.')
- dirmap = self._set_dirmap(dirmap, fdir)
- flat_idx = np.arange(fdir.size)
- fdir_orig_type = fdir.dtype
- try:
- mintype = np.min_scalar_type(fdir.size)
- fdir = fdir.astype(mintype)
- flat_idx = flat_idx.astype(mintype)
- startnodes, endnodes = self._construct_matching(fdir, flat_idx,
- dirmap=dirmap)
- start = startnodes[mask.flat[startnodes]]
- end = fdir.flat[start]
- # Find nodes with indegree > 1
- indegree = (np.bincount(end)).astype(np.uint8)
- forks_end = np.flatnonzero(indegree > 1)
- # Find fork nodes
- is_fork = np.in1d(end, forks_end)
- forks = pd.Series(end[is_fork], index=start[is_fork])
- # Cut endnode at forks
- endnodes[start[is_fork]] = 0
- endnodes[0] = 0
- # Make sure while loop terminates
- endnodes[endnodes == startnodes] = 0
- end = endnodes[start]
- no_pred = ~np.in1d(start, end)
- start = start[no_pred]
- end = endnodes[start]
- ixes = []
- ixes.append(start)
- ixes.append(end)
- while end.any():
- end = endnodes[end]
- ixes.append(end)
- ixes = np.column_stack(ixes)
- forkorder = pd.Series(np.arange(len(ixes)), index=ixes[:, 0])
- profiles = []
- connections = {}
- for row in ixes:
- profile = row[row != 0]
- profile_start, profile_end = profile[0], profile[-1]
- start_num = forkorder.at[profile_start]
- if profile_end in forks.index:
- profile_end = forks.at[profile_end]
- if profile_end in forkorder.index:
- end_num = forkorder.at[profile_end]
- else:
- end_num = -1
- profiles.append(profile)
- connections.update({start_num : end_num})
- except:
- raise
- finally:
- self._unflatten_fdir(fdir, flat_idx, dirmap)
- fdir = fdir.astype(fdir_orig_type)
- return profiles, connections
-
- def extract_river_network(self, fdir, mask, dirmap=None, nodata_in=None, routing='d8',
- apply_mask=True, ignore_metadata=False, **kwargs):
- """
- Generates river segments from accumulation and flow_direction arrays.
-
- Parameters
- ----------
- fdir : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- mask : np.ndarray or Raster
- Boolean array indicating channelized regions
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- nodata_in : int or float
- Value to indicate nodata in input array.
- routing : str
- Routing algorithm to use:
- 'd8' : D8 flow directions
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
-
- Returns
- -------
- geo : geojson.FeatureCollection
- A geojson feature collection of river segments. Each array contains the cell
- indices of junctions in the segment.
- """
- profiles, connections = self.extract_profiles(fdir, mask, dirmap=dirmap,
- nodata_in=nodata_in,
- routing=routing,
- apply_mask=apply_mask,
- ignore_metadata=ignore_metadata,
- **kwargs)
- fdir_nodata_in = self._check_nodata_in(fdir, nodata_in)
- fdir_props = {}
- fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=fdir_nodata_in,
- properties=fdir_props,
- ignore_metadata=ignore_metadata, **kwargs)
- featurelist = []
- for index, profile in enumerate(profiles):
- endpoint = profiles[connections[index]][0]
- yi, xi = np.unravel_index(profile.tolist() + [endpoint], fdir.shape)
- x, y = fdir.affine * (xi, yi)
- line = geojson.LineString(np.column_stack([x, y]).tolist())
- featurelist.append(geojson.Feature(geometry=line, id=index))
- geo = geojson.FeatureCollection(featurelist)
- return geo
-
- def detect_pits(self, data, nodata_in=None, apply_mask=False, ignore_metadata=True,
- **kwargs):
- """
- Detect pits in a DEM.
-
- Parameters
- ----------
- data : str or Raster
- DEM data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- nodata_in : int or float
- Value to indicate nodata in input array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
-
- Returns
- -------
- pits : numpy ndarray
- Boolean array indicating locations of pits.
- """
- nodata_in = self._check_nodata_in(data, nodata_in)
- grid_props = {}
- dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=grid_props, ignore_metadata=ignore_metadata,
- **kwargs)
- if nodata_in is None:
- dem_mask = np.array([]).astype(int)
- else:
- if np.isnan(nodata_in):
- dem_mask = np.where(np.isnan(dem.ravel()))[0]
- else:
- dem_mask = np.where(dem.ravel() == nodata_in)[0]
- # Make sure nothing flows to the nodata cells
- dem.flat[dem_mask] = dem.max() + 1
- inside = self._inside_indices(dem, mask=dem_mask)
- inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
- pits_bool = (diff < 0).all(axis=0)
- pits = np.zeros(dem.shape, dtype=np.bool)
- pits.flat[inside] = pits_bool
- return pits
-
- def detect_flats(self, data, nodata_in=None, apply_mask=False, ignore_metadata=True, **kwargs):
- """
- Detect flats in a DEM.
-
- Parameters
- ----------
- data : str or Raster
- DEM data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- nodata_in : int or float
- Value to indicate nodata in input array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
-
- Returns
- -------
- flats : numpy ndarray
- Boolean array indicating locations of flats.
- """
- nodata_in = self._check_nodata_in(data, nodata_in)
- grid_props = {}
- dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=grid_props, ignore_metadata=ignore_metadata,
- **kwargs)
- if nodata_in is None:
- dem_mask = np.array([]).astype(int)
- else:
- if np.isnan(nodata_in):
- dem_mask = np.where(np.isnan(dem.ravel()))[0]
- else:
- dem_mask = np.where(dem.ravel() == nodata_in)[0]
- # Make sure nothing flows to the nodata cells
- dem.flat[dem_mask] = dem.max() + 1
- inside = self._inside_indices(dem, mask=dem_mask)
- inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
- pits_bool = (diff < 0).all(axis=0)
- flats_bool = (~fdir_defined & ~pits_bool)
- flats = np.zeros(dem.shape, dtype=np.bool)
- flats.flat[inside] = flats_bool
- return flats
-
- def detect_cycles(self, fdir, max_cycle_len=50, dirmap=None, nodata_in=0, nodata_out=-1,
- apply_mask=True, ignore_metadata=False, **kwargs):
- """
- Checks for cycles in flow direction array.
-
- Parameters
- ----------
- fdir : str or Raster
- Flow direction data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- max_cycle_size: int
- Max depth of cycle to search for.
- dirmap : list or tuple (length 8)
- List of integer values representing the following
- cardinal and intercardinal directions (in order):
- [N, NE, E, SE, S, SW, W, NW]
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value indicating no data in output array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
-
- Returns
- -------
- num_cycles : numpy ndarray
- Array indicating max cycle length at each cell.
- """
- dirmap = self._set_dirmap(dirmap, fdir)
- nodata_in = self._check_nodata_in(fdir, nodata_in)
- grid_props = {'nodata' : nodata_out}
- metadata = {}
- fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=grid_props,
- ignore_metadata=ignore_metadata, **kwargs)
- if np.isnan(nodata_in):
- in_catch = ~np.isnan(fdir.ravel())
- else:
- in_catch = (fdir.ravel() != nodata_in)
- ix = np.where(in_catch)[0]
- flat_idx = np.arange(fdir.size)
- fdir_orig_type = fdir.dtype
- ncycles = np.zeros(fdir.shape, dtype=np.min_scalar_type(max_cycle_len + 1))
- try:
- mintype = np.min_scalar_type(fdir.size)
- fdir = fdir.astype(mintype)
- flat_idx = flat_idx.astype(mintype)
- startnodes, endnodes = self._construct_matching(fdir, flat_idx, dirmap)
- startnodes = startnodes[ix]
- ncycles.flat[startnodes] = self._num_cycles(fdir, startnodes, max_cycle_len=max_cycle_len)
- except:
- raise
- finally:
- self._unflatten_fdir(fdir, flat_idx, dirmap)
- fdir = fdir.astype(fdir_orig_type)
- return ncycles
-
- def fill_pits(self, data, out_name='filled_dem', nodata_in=None, nodata_out=0,
- inplace=True, apply_mask=False, ignore_metadata=False, **kwargs):
- """
- Fill pits in a DEM. Raises pits to same elevation as lowest neighbor.
-
- Parameters
- ----------
- data : str or Raster
- DEM data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- out_name : string
- Name of attribute containing new filled pit array.
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value indicating no data in output array.
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
- """
- nodata_in = self._check_nodata_in(data, nodata_in)
- grid_props = {'nodata' : nodata_out}
- metadata = {}
- dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=grid_props, ignore_metadata=ignore_metadata,
- **kwargs)
- if nodata_in is None:
- dem_mask = np.array([]).astype(int)
- else:
- if np.isnan(nodata_in):
- dem_mask = np.where(np.isnan(dem.ravel()))[0]
- else:
- dem_mask = np.where(dem.ravel() == nodata_in)[0]
- # Make sure nothing flows to the nodata cells
- dem.flat[dem_mask] = dem.max() + 1
- inside = self._inside_indices(dem, mask=dem_mask)
- inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
- pits_bool = (diff < 0).all(axis=0)
- pits = np.zeros(dem.shape, dtype=np.bool)
- pits.flat[inside] = pits_bool
- dem_out = dem.copy()
- dem_out.flat[inside[pits_bool]] = (dem.flat[inner_neighbors[:, pits_bool]
- [np.argmin(np.abs(diff[:, pits_bool]), axis=0),
- np.arange(np.count_nonzero(pits_bool))]])
- return self._output_handler(data=dem_out, out_name=out_name, properties=grid_props,
- inplace=inplace, metadata=metadata)
-
- def _select_surround(self, i, j):
- """
- Select the eight indices surrounding a given index.
- """
- return ([i - 1, i - 1, i + 0, i + 1, i + 1, i + 1, i + 0, i - 1],
- [j + 0, j + 1, j + 1, j + 1, j + 0, j - 1, j - 1, j - 1])
-
- # def _select_edge_sur(self, edges, k):
- # """
- # Select the five cell indices surrounding each edge cell.
- # """
- # i, j = edges[k]['k']
- # if k == 'n':
- # return ([i + 0, i + 1, i + 1, i + 1, i + 0],
- # [j + 1, j + 1, j + 0, j - 1, j - 1])
- # elif k == 'e':
- # return ([i - 1, i + 1, i + 1, i + 0, i - 1],
- # [j + 0, j + 0, j - 1, j - 1, j - 1])
- # elif k == 's':
- # return ([i - 1, i - 1, i + 0, i + 0, i - 1],
- # [j + 0, j + 1, j + 1, j - 1, j - 1])
- # elif k == 'w':
- # return ([i - 1, i - 1, i + 0, i + 1, i + 1],
- # [j + 0, j + 1, j + 1, j + 1, j + 0])
-
- def _select_surround_ravel(self, i, shape):
- """
- Select the eight indices surrounding a flattened index.
- """
- offset = shape[1]
- return np.array([i + 0 - offset,
- i + 1 - offset,
- i + 1 + 0,
- i + 1 + offset,
- i + 0 + offset,
- i - 1 + offset,
- i - 1 + 0,
- i - 1 - offset]).T
-
- def _inside_indices(self, data, mask=None):
- if mask is None:
- mask = np.array([]).astype(int)
- a = np.arange(data.size)
- top = np.arange(data.shape[1])[1:-1]
- left = np.arange(0, data.size, data.shape[1])
- right = np.arange(data.shape[1] - 1, data.size + 1, data.shape[1])
- bottom = np.arange(data.size - data.shape[1], data.size)[1:-1]
- exclude = np.unique(np.concatenate([top, left, right, bottom, mask]))
- inside = np.delete(a, exclude)
- return inside
-
- def _set_dirmap(self, dirmap, data, default_dirmap=(64, 128, 1, 2, 4, 8, 16, 32)):
- # TODO: Is setting a default dirmap even a good idea?
- if dirmap is None:
- if isinstance(data, str):
- if data in self.grids:
- try:
- dirmap = getattr(self, data).metadata['dirmap']
- except:
- dirmap = default_dirmap
- else:
- raise KeyError("{0} not found in grid instance"
- .format(data))
- elif isinstance(data, Raster):
- try:
- dirmap = data.metadata['dirmap']
- except:
- dirmap = default_dirmap
- else:
- dirmap = default_dirmap
- if len(dirmap) != 8:
- raise AssertionError('dirmap must be a sequence of length 8')
- try:
- assert(not 0 in dirmap)
- except:
- raise ValueError("Directional mapping cannot contain '0' (reserved value)")
- return dirmap
-
- def _grad_from_higher(self, high_edge_cells, inner_neighbors, diff,
- fdir_defined, in_bounds, labels, numlabels, crosswalk, inside):
- z = np.zeros_like(labels)
- max_iter = np.bincount(labels.ravel())[1:].max()
- u = high_edge_cells.copy()
- z.flat[inside[u]] = 1
- for i in range(2, max_iter):
- # Select neighbors of high edge cells
- hec_neighbors = inner_neighbors[:, u]
- # Get neighbors with same elevation that are in bounds
- u = np.unique(np.where((diff[:, u] == 0) & (in_bounds.flat[hec_neighbors] == 1),
- hec_neighbors, 0))
- # Filter out entries that have already been incremented
- not_got = (z.flat[u] == 0)
- u = u[not_got]
- # Get indices of inner cells from raw index
- u = crosswalk.flat[u]
- # Filter out neighbors that are in low edge_cells
- u = u[(~fdir_defined[u])]
- # Increment neighboring cells
- z.flat[inside[u]] = i
- if u.size <= 1:
- break
- z.flat[inside[0]] = 0
- # Flip increments
- d = {}
- for i in range(1, z.max()):
- label = labels[z == i]
- label = label[label != 0]
- label = np.unique(label)
- d.update({i : label})
- max_incs = np.zeros(numlabels + 1)
- for i in range(1, z.max()):
- max_incs[d[i]] = i
- max_incs = max_incs[labels.ravel()].reshape(labels.shape)
- grad_from_higher = max_incs - z
- return grad_from_higher
-
- def _grad_towards_lower(self, low_edge_cells, inner_neighbors, diff,
- fdir_defined, in_bounds, labels, numlabels, crosswalk, inside):
- x = np.zeros_like(labels)
- u = low_edge_cells.copy()
- x.flat[inside[u]] = 1
- max_iter = np.bincount(labels.ravel())[1:].max()
-
- for i in range(2, max_iter):
- # Select neighbors of high edge cells
- lec_neighbors = inner_neighbors[:, u]
- # Get neighbors with same elevation that are in bounds
- u = np.unique(
- np.where((diff[:, u] == 0) & (in_bounds.flat[lec_neighbors] == 1),
- lec_neighbors, 0))
- # Filter out entries that have already been incremented
- not_got = (x.flat[u] == 0)
- u = u[not_got]
- # Get indices of inner cells from raw index
- u = crosswalk.flat[u]
- u = u[~fdir_defined.flat[u]]
- # Increment neighboring cells
- x.flat[inside[u]] = i
- if u.size == 0:
- break
- x.flat[inside[0]] = 0
- grad_towards_lower = x
- return grad_towards_lower
-
- def _get_high_edge_cells(self, diff, fdir_defined):
- # High edge cells are defined as:
- # (a) Flow direction is not defined
- # (b) Has at least one neighboring cell at a higher elevation
- higher_cell = (diff < 0).any(axis=0)
- high_edge_cells_bool = (~fdir_defined & higher_cell)
- high_edge_cells = np.where(high_edge_cells_bool)[0]
- return high_edge_cells
-
- def _get_low_edge_cells(self, diff, fdir_defined, inner_neighbors, shape, inside):
- # TODO: There is probably a more efficient way to do this
- # TODO: Select neighbors of flats and then see which have direction defined
- # Low edge cells are defined as:
- # (a) Flow direction is defined
- # (b) Has at least one neighboring cell, n, at the same elevation
- # (c) The flow direction for this cell n is undefined
- # Need to check if neighboring cell has fdir undefined
- same_elev_cell = (diff == 0).any(axis=0)
- low_edge_cell_candidates = (fdir_defined & same_elev_cell)
- fdir_def_all = -1 * np.ones(shape)
- fdir_def_all.flat[inside] = fdir_defined.ravel()
- fdir_def_neighbors = fdir_def_all.flat[inner_neighbors[:, low_edge_cell_candidates]]
- same_elev_neighbors = ((diff[:, low_edge_cell_candidates]) == 0)
- low_edge_cell_passed = (fdir_def_neighbors == 0) & (same_elev_neighbors == 1)
- low_edge_cells = (np.where(low_edge_cell_candidates)[0]
- [low_edge_cell_passed.any(axis=0)])
- return low_edge_cells
-
- def _drainage_gradient(self, dem, inside):
- if not _HAS_SKIMAGE:
- raise ImportError('resolve_flats requires skimage.measure module')
- inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
- pits_bool = (diff < 0).all(axis=0)
- flats_bool = (~fdir_defined & ~pits_bool)
- flats = np.zeros(dem.shape, dtype=np.bool)
- flats.flat[inside] = flats_bool
- high_edge_cells = self._get_high_edge_cells(diff, fdir_defined)
- low_edge_cells = self._get_low_edge_cells(diff, fdir_defined, inner_neighbors,
- shape=dem.shape, inside=inside)
- # Get flats to label
- labels, numlabels = skimage.measure.label(flats, return_num=True)
- # Make sure cells stay in bounds
- in_bounds = np.zeros_like(labels)
- in_bounds.flat[inside] = 1
- crosswalk = np.zeros_like(labels)
- crosswalk.flat[inside] = np.arange(inside.size)
- grad_from_higher = self._grad_from_higher(high_edge_cells, inner_neighbors, diff,
- fdir_defined, in_bounds, labels, numlabels,
- crosswalk, inside)
- grad_towards_lower = self._grad_towards_lower(low_edge_cells, inner_neighbors, diff,
- fdir_defined, in_bounds, labels, numlabels,
- crosswalk, inside)
- drainage_grad = (2*grad_towards_lower + grad_from_higher).astype(int)
- return drainage_grad, flats, high_edge_cells, low_edge_cells, labels, diff
-
- def _d8_diff(self, dem, inside):
- np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
- category=RuntimeWarning)
- inner_neighbors = self._select_surround_ravel(inside, dem.shape).T
- inner_neighbors_elev = dem.flat[inner_neighbors]
- diff = np.subtract(dem.flat[inside], inner_neighbors_elev)
- fdir_defined = (diff > 0).any(axis=0)
- return inner_neighbors, diff, fdir_defined
-
- def resolve_flats(self, data=None, out_name='inflated_dem', nodata_in=None, nodata_out=None,
- inplace=True, apply_mask=False, ignore_metadata=False, **kwargs):
- """
- Resolve flats in a DEM using the modified method of Garbrecht and Martz (1997).
- See: https://arxiv.org/abs/1511.04433
-
- Parameters
- ----------
- data : str or Raster
- DEM data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- out_name : string
- Name of attribute containing new flow direction array.
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value to indicate nodata in output array.
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
- """
- # handle nodata values in dem
- np.warnings.filterwarnings(action='ignore', message='All-NaN axis encountered',
- category=RuntimeWarning)
- nodata_in = self._check_nodata_in(data, nodata_in)
- if nodata_out is None:
- nodata_out = nodata_in
- grid_props = {'nodata' : nodata_out}
- metadata = {}
- dem = self._input_handler(data, apply_mask=apply_mask, properties=grid_props,
- ignore_metadata=ignore_metadata, metadata=metadata, **kwargs)
- if nodata_in is None:
- dem_mask = np.array([]).astype(int)
- else:
- if np.isnan(nodata_in):
- dem_mask = np.where(np.isnan(dem.ravel()))[0]
- else:
- dem_mask = np.where(dem.ravel() == nodata_in)[0]
- inside = self._inside_indices(dem, mask=dem_mask)
- drainage_result = self._drainage_gradient(dem, inside)
- drainage_grad, flats, high_edge_cells, low_edge_cells, labels, diff = drainage_result
- drainage_grad = drainage_grad.astype(np.float)
- flatlabels = labels.flat[inside][flats.flat[inside]]
- flat_diffs = diff[:, flats.flat[inside].ravel()].astype(float)
- flat_diffs[flat_diffs == 0] = np.nan
- # TODO: Warning triggered here: all-nan axis encountered
- minsteps = np.nanmin(np.abs(flat_diffs), axis=0)
- minsteps = pd.Series(minsteps, index=flatlabels).fillna(0)
- minsteps = minsteps[minsteps != 0].groupby(level=0).min()
- gradmax = pd.Series(drainage_grad.flat[inside][flats.flat[inside]],
- index=flatlabels).groupby(level=0).max().astype(int)
- gradfactor = (0.9 * (minsteps / gradmax)).replace(np.inf, 0).append(pd.Series({0 : 0}))
- drainage_grad.flat[inside[flats.flat[inside]]] *= gradfactor[flatlabels].values
- drainage_grad.flat[inside[low_edge_cells]] = 0
- dem_out = dem.astype(np.float) + drainage_grad
- return self._output_handler(data=dem_out, out_name=out_name, properties=grid_props,
- inplace=inplace, metadata=metadata)
-
- def fill_depressions(self, data, out_name='flooded_dem', nodata_in=None, nodata_out=None,
- inplace=True, apply_mask=False, ignore_metadata=False, **kwargs):
- """
- Fill depressions in a DEM. Raises depressions to same elevation as lowest neighbor.
-
- Parameters
- ----------
- data : str or Raster
- DEM data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- out_name : string
- Name of attribute containing new filled depressions array.
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value indicating no data in output array.
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
- """
- if not _HAS_SKIMAGE:
- raise ImportError('resolve_flats requires skimage.morphology module')
- nodata_in = self._check_nodata_in(data, nodata_in)
- if nodata_out is None:
- nodata_out = nodata_in
- grid_props = {'nodata' : nodata_out}
- metadata = {}
- dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
- properties=grid_props, ignore_metadata=ignore_metadata,
- **kwargs)
- if nodata_in is None:
- dem_mask = np.ones(dem.shape, dtype=np.bool)
- else:
- if np.isnan(nodata_in):
- dem_mask = np.isnan(dem)
- else:
- dem_mask = (dem == nodata_in)
- dem_mask[0, :] = True
- dem_mask[-1, :] = True
- dem_mask[:, 0] = True
- dem_mask[:, -1] = True
- # Make sure nothing flows to the nodata cells
- nanmax = dem[~np.isnan(dem)].max()
- seed = np.copy(dem)
- seed[~dem_mask] = nanmax
- dem_out = skimage.morphology.reconstruction(seed, dem, method='erosion')
- return self._output_handler(data=dem_out, out_name=out_name, properties=grid_props,
- inplace=inplace, metadata=metadata)
-
- # def raise_nondraining_flats(self, data, out_name='raised_dem', nodata_in=None,
- # nodata_out=np.nan, inplace=True, apply_mask=False,
- # ignore_metadata=False, **kwargs):
- # """
- # Raises nondraining flats (those with no low edge cells) to the elevation of the
- # lowest surrounding neighbor cell.
-
- # Parameters
- # ----------
- # data : str or Raster
- # DEM data.
- # If str: name of the dataset to be viewed.
- # If Raster: a Raster instance (see pysheds.view.Raster)
- # out_name : string
- # Name of attribute containing new flat-resolved array.
- # nodata_in : int or float
- # Value to indicate nodata in input array.
- # nodata_out : int or float
- # Value indicating no data in output array.
- # inplace : bool
- # If True, write output array to self..
- # Otherwise, return the output array.
- # apply_mask : bool
- # If True, "mask" the output using self.mask.
- # ignore_metadata : bool
- # If False, require a valid affine transform and CRS.
- # """
- # if not _HAS_SKIMAGE:
- # raise ImportError('resolve_flats requires skimage.measure module')
- # # TODO: Most of this is copied from resolve flats
- # if nodata_in is None:
- # if isinstance(data, str):
- # try:
- # nodata_in = getattr(self, data).nodata
- # except:
- # raise NameError("nodata value for '{0}' not found in instance."
- # .format(data))
- # else:
- # raise KeyError("No 'nodata' value specified.")
- # grid_props = {'nodata' : nodata_out}
- # metadata = {}
- # dem = self._input_handler(data, apply_mask=apply_mask, properties=grid_props,
- # ignore_metadata=ignore_metadata, metadata=metadata, **kwargs)
- # no_lec, labels, numlabels, neighbor_elevs, flatlabels = (
- # self._get_nondraining_flats(dem, nodata_in=nodata_in, nodata_out=nodata_out,
- # inplace=inplace, apply_mask=apply_mask,
- # ignore_metadata=ignore_metadata, **kwargs))
- # neighbor_elevmin = np.nanmin(neighbor_elevs, axis=0)
- # raise_elev = pd.Series(neighbor_elevmin, index=flatlabels).groupby(level=0).min()
- # elev_map = np.zeros(numlabels + 1, dtype=dem.dtype)
- # elev_map[no_lec] = raise_elev[no_lec].values
- # elev_replace = elev_map[labels]
- # raised_dem = np.where(elev_replace, elev_replace, dem).astype(dem.dtype)
- # return self._output_handler(data=raised_dem, out_name=out_name, properties=grid_props,
- # inplace=inplace, metadata=metadata)
-
- def detect_depressions(self, data, nodata_in=None, nodata_out=np.nan,
- inplace=True, apply_mask=False, ignore_metadata=False,
- **kwargs):
- """
- Detects nondraining flats (those with no low edge cells).
-
- Parameters
- ----------
- data : str or Raster
- DEM data.
- If str: name of the dataset to be viewed.
- If Raster: a Raster instance (see pysheds.view.Raster)
- nodata_in : int or float
- Value to indicate nodata in input array.
- nodata_out : int or float
- Value indicating no data in output array.
- inplace : bool
- If True, write output array to self..
- Otherwise, return the output array.
- apply_mask : bool
- If True, "mask" the output using self.mask.
- ignore_metadata : bool
- If False, require a valid affine transform and CRS.
-
- Returns
- -------
- nondraining_flats : numpy ndarray
- Boolean array indicating locations of nondraining flats.
- """
- if not _HAS_SKIMAGE:
- raise ImportError('resolve_flats requires skimage.measure module')
- # TODO: Most of this is copied from resolve flats
- if nodata_in is None:
- if isinstance(data, str):
- try:
- nodata_in = getattr(self, data).nodata
- except:
- raise NameError("nodata value for '{0}' not found in instance."
- .format(data))
- else:
- raise KeyError("No 'nodata' value specified.")
- grid_props = {'nodata' : nodata_out}
- metadata = {}
- dem = self._input_handler(data, apply_mask=apply_mask, properties=grid_props,
- ignore_metadata=ignore_metadata, metadata=metadata, **kwargs)
- no_lec, labels, numlabels, neighbor_elevs, flatlabels = (
- self._get_nondraining_flats(dem, nodata_in=nodata_in, nodata_out=nodata_out,
- inplace=inplace, apply_mask=apply_mask,
- ignore_metadata=ignore_metadata, **kwargs))
- bool_map = np.zeros(numlabels + 1, dtype=np.bool)
- bool_map[no_lec] = 1
- nondraining_flats = bool_map[labels]
- return nondraining_flats
-
- def _get_nondraining_flats(self, dem, nodata_in=None, nodata_out=np.nan,
- inplace=True, apply_mask=False, ignore_metadata=False, **kwargs):
- if nodata_in is None:
- dem_mask = np.array([]).astype(int)
- else:
- if np.isnan(nodata_in):
- dem_mask = np.where(np.isnan(dem.ravel()))[0]
- else:
- dem_mask = np.where(dem.ravel() == nodata_in)[0]
- inside = self._inside_indices(dem, mask=dem_mask)
- inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
- pits_bool = (diff < 0).all(axis=0)
- flats_bool = (~fdir_defined & ~pits_bool)
- flats = np.zeros(dem.shape, dtype=np.bool)
- flats.flat[inside] = flats_bool
- low_edge_cells = self._get_low_edge_cells(diff, fdir_defined, inner_neighbors,
- shape=dem.shape, inside=inside)
- # Get flats to label
- labels, numlabels = skimage.measure.label(flats, return_num=True)
- flatlabels = labels.flat[inside][flats.flat[inside]]
- flat_neighbors = inner_neighbors[:, flats.flat[inside].ravel()]
- flat_elevs = dem.flat[inside][flats.flat[inside]]
- # TODO: DEPRECATED
- # neighbor_elevs = dem.flat[flat_neighbors]
- # neighbor_elevs[neighbor_elevs == flat_elevs] = np.nan
- neighbor_elevs = None
- flat_elevs = pd.Series(flat_elevs, index=flatlabels).groupby(level=0).mean()
- lec_elev = np.zeros(dem.shape, dtype=dem.dtype)
- lec_elev.flat[inside[low_edge_cells]] = dem.flat[inside].flat[low_edge_cells]
- has_lec = (lec_elev.flat[flat_neighbors] == flat_elevs[flatlabels].values).any(axis=0)
- has_lec = pd.Series(has_lec, index=flatlabels).groupby(level=0).any()
- no_lec = has_lec[~has_lec].index.values
- return no_lec, labels, numlabels, neighbor_elevs, flatlabels
-
- def polygonize(self, data=None, mask=None, connectivity=4, transform=None):
- """
- Yield (polygon, value) for each set of adjacent pixels of the same value.
- Wrapper around rasterio.features.shapes
-
- From rasterio documentation:
-
- Parameters
- ----------
- data : numpy ndarray
- mask : numpy ndarray
- Values of False or 0 will be excluded from feature generation.
- connectivity : 4 or 8 (int)
- Use 4 or 8 pixel connectivity.
- transform : affine.Affine
- Transformation from pixel coordinates of `image` to the
- coordinate system of the input `shapes`.
- """
- if not _HAS_RASTERIO:
- raise ImportError('Requires rasterio module')
- if data is None:
- data = self.mask.astype(np.uint8)
- if mask is None:
- mask = self.mask
- if transform is None:
- transform = self.affine
- shapes = rasterio.features.shapes(data, mask=mask, connectivity=connectivity,
- transform=transform)
- return shapes
-
- def rasterize(self, shapes, out_shape=None, fill=0, out=None, transform=None,
- all_touched=False, default_value=1, dtype=None):
- """
- Return an image array with input geometries burned in.
- Wrapper around rasterio.features.rasterize
-
- From rasterio documentation:
-
- Parameters
- ----------
- shapes : iterable of (geometry, value) pairs or iterable over
- geometries.
- out_shape : tuple or list
- Shape of output numpy ndarray.
- fill : int or float, optional
- Fill value for all areas not covered by input geometries.
- out : numpy ndarray
- Array of same shape and data type as `image` in which to store
- results.
- transform : affine.Affine
- Transformation from pixel coordinates of `image` to the
- coordinate system of the input `shapes`.
- all_touched : boolean, optional
- If True, all pixels touched by geometries will be burned in. If
- false, only pixels whose center is within the polygon or that
- are selected by Bresenham's line algorithm will be burned in.
- default_value : int or float, optional
- Used as value for all geometries, if not provided in `shapes`.
- dtype : numpy data type
- Used as data type for results, if `out` is not provided.
- """
- if not _HAS_RASTERIO:
- raise ImportError('Requires rasterio module')
- if out_shape is None:
- out_shape = self.shape
- if transform is None:
- transform = self.affine
- raster = rasterio.features.rasterize(shapes, out_shape=out_shape, fill=fill,
- out=out, transform=transform,
- all_touched=all_touched,
- default_value=default_value, dtype=dtype)
- return raster
-
- def snap_to_mask(self, mask, xy, return_dist=True):
- """
- Snap a set of xy coordinates (xy) to the nearest nonzero cells in a raster (mask)
-
- Parameters
- ----------
- mask: numpy ndarray-like with shape (M, K)
- A raster dataset with nonzero elements indicating cells to match to (e.g:
- a flow accumulation grid with ones indicating cells above a certain threshold).
- xy: numpy ndarray-like with shape (N, 2)
- Points to match (example: gage location coordinates).
- return_dist: If true, return the distances from xy to the nearest matched point in mask.
- """
-
- if not _HAS_SCIPY:
- raise ImportError('Requires scipy.spatial module')
- if isinstance(mask, Raster):
- affine = mask.viewfinder.affine
- elif isinstance(mask, 'str'):
- affine = getattr(self, mask).viewfinder.affine
- mask_ix = np.where(mask.ravel())[0]
- yi, xi = np.unravel_index(mask_ix, mask.shape)
- xiyi = np.vstack([xi, yi])
- x, y = affine * xiyi
- tree_xy = np.column_stack([x, y])
- tree = scipy.spatial.cKDTree(tree_xy)
- dist, ix = tree.query(xy)
- if return_dist:
- return tree_xy[ix], dist
- else:
- return tree_xy[ix]
+ _HAS_NUMBA = False
+if _HAS_NUMBA:
+ from pysheds.sgrid import sGrid as Grid
+else:
+ from pysheds.pgrid import Grid as Grid
diff --git a/pysheds/io.py b/pysheds/io.py
new file mode 100644
index 0000000..05afe34
--- /dev/null
+++ b/pysheds/io.py
@@ -0,0 +1,296 @@
+import ast
+import warnings
+import numpy as np
+import pyproj
+import rasterio
+import rasterio.features
+from affine import Affine
+from distutils.version import LooseVersion
+from pysheds.sview import Raster, ViewFinder, View
+
+_OLD_PYPROJ = LooseVersion(pyproj.__version__) < LooseVersion('2.2')
+_pyproj_crs = lambda Proj: Proj.crs if not _OLD_PYPROJ else Proj
+_pyproj_crs_is_geographic = 'is_latlong' if _OLD_PYPROJ else 'is_geographic'
+_pyproj_init = '+init=epsg:4326' if _OLD_PYPROJ else 'epsg:4326'
+
+def read_ascii(data, skiprows=6, mask=None, crs=pyproj.Proj(_pyproj_init),
+ xll='lower', yll='lower', metadata={}, **kwargs):
+ """
+ Reads data from an ascii file and returns a Raster.
+
+ Parameters
+ ----------
+ data : str
+ File name or path.
+ skiprows : int (optional)
+ The number of rows taken up by the header (defaults to 6).
+ mask : np.ndarray or Raster
+ Boolean array to mask dataset.
+ crs : pyroj.Proj
+ Coordinate reference system of ascii data.
+ xll : 'lower' or 'center' (str)
+ Whether XLLCORNER or XLLCENTER is used.
+ yll : 'lower' or 'center' (str)
+ Whether YLLCORNER or YLLCENTER is used.
+ metadata : dict
+ Other attributes describing dataset, such as direction
+ mapping for flow direction files. e.g.:
+ metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
+ 'routing' : 'd8'}
+
+ Additional keyword arguments (**kwargs) are passed to numpy.loadtxt()
+
+ Returns
+ -------
+ out : Raster
+ Raster object containing loaded data.
+ """
+ with open(data) as header:
+ ncols = int(header.readline().split()[1])
+ nrows = int(header.readline().split()[1])
+ xll = ast.literal_eval(header.readline().split()[1])
+ yll = ast.literal_eval(header.readline().split()[1])
+ cellsize = ast.literal_eval(header.readline().split()[1])
+ nodata = ast.literal_eval(header.readline().split()[1])
+ shape = (nrows, ncols)
+ data = np.loadtxt(data, skiprows=skiprows, **kwargs)
+ nodata = data.dtype.type(nodata)
+ affine = Affine(cellsize, 0., xll, 0., -cellsize, yll + nrows * cellsize)
+ viewfinder = ViewFinder(affine=affine, shape=shape, mask=mask, nodata=nodata, crs=crs)
+ out = Raster(data, viewfinder, metadata=metadata)
+ return out
+
+def read_raster(data, band=1, window=None, window_crs=None, mask_geometry=False,
+ nodata=None, metadata={}, **kwargs):
+ """
+ Reads data from a raster file and returns a Raster object.
+
+ Parameters
+ ----------
+ data : str
+ File name or path.
+ band : int
+ The band number to read if multiband.
+ window : tuple
+ If using windowed reading, specify window (xmin, ymin, xmax, ymax).
+ window_crs : pyproj.Proj instance
+ Coordinate reference system of window. If None, use the raster file's crs.
+ mask_geometry : iterable object
+ Geometries indicating where data should be read. The values must be a
+ GeoJSON-like dict or an object that implements the Python geo interface
+ protocol (such as a Shapely Polygon).
+ nodata : int or float
+ Value indicating 'no data' in raster file. If None, will attempt to read
+ intended 'no data' value from raster file.
+ metadata : dict
+ Other attributes describing dataset, such as direction
+ mapping for flow direction files. e.g.:
+ metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
+ 'routing' : 'd8'}
+
+ Additional keyword arguments are passed to rasterio.open()
+
+ Returns
+ -------
+ out : Raster
+ Raster object containing loaded data.
+ """
+ mask = None
+ with rasterio.open(data, **kwargs) as f:
+ crs = pyproj.Proj(f.crs, preserve_units=True)
+ if window is None:
+ shape = f.shape
+ if len(f.indexes) > 1:
+ data = np.ma.filled(f.read_band(band))
+ else:
+ data = np.ma.filled(f.read())
+ affine = f.transform
+ data = data.reshape(shape)
+ else:
+ if window_crs is not None:
+ if window_crs.srs != crs.srs:
+ xmin, ymin, xmax, ymax = window
+ if _OLD_PYPROJ:
+ extent = pyproj.transform(window_crs, crs, (xmin, xmax),
+ (ymin, ymax))
+ else:
+ extent = pyproj.transform(window_crs, crs, (xmin, xmax),
+ (ymin, ymax), errcheck=True,
+ always_xy=True)
+ window = (extent[0][0], extent[1][0], extent[0][1], extent[1][1])
+ # If window crs not specified, assume it is in raster crs
+ ix_window = f.window(*window)
+ if len(f.indexes) > 1:
+ data = np.ma.filled(f.read_band(band, window=ix_window))
+ else:
+ data = np.ma.filled(f.read(window=ix_window))
+ affine = f.window_transform(ix_window)
+ data = np.squeeze(data)
+ shape = data.shape
+ if mask_geometry:
+ mask = rasterio.features.geometry_mask(mask_geometry, shape, affine, invert=True)
+ # No mask was applied if all False, out of bounds
+ if not mask.any():
+ # Return mask to all True and deliver warning
+ warnings.warn('`mask_geometry` does not fall within the bounds of the raster.')
+ mask = ~mask
+ # If no `nodata` value specified, read intended nodata value from file
+ if nodata is None:
+ nodata = f.nodatavals[0]
+ # If no `nodata` value in file, default to 0
+ if nodata is None:
+ warnings.warn('No `nodata` value detected. Defaulting to 0.')
+ nodata = 0
+ # Otherwise, set nodata to value found in file
+ else:
+ nodata = data.dtype.type(nodata)
+ viewfinder = ViewFinder(affine=affine, shape=shape, mask=mask, nodata=nodata, crs=crs)
+ out = Raster(data, viewfinder, metadata=metadata)
+ return out
+
+def to_ascii(data, file_name, target_view=None, delimiter=' ', fmt=None,
+ interpolation='nearest', apply_input_mask=False,
+ apply_output_mask=True, affine=None, shape=None, crs=None,
+ mask=None, nodata=None, dtype=None, **kwargs):
+ """
+ Writes a Raster object to a formatted ascii text file.
+
+ Parameters
+ ----------
+ data: Raster
+ Raster dataset to write.
+ file_name : str
+ Name of file or path to write to.
+ target_view : ViewFinder
+ ViewFinder to use when writing data. Defaults to data.viewfinder.
+ delimiter : string (optional)
+ Delimiter to use in output file (defaults to ' ')
+ fmt : str
+ Formatting for numeric data. Passed to np.savetxt.
+ interpolation : 'nearest', 'linear'
+ Interpolation method to be used if spatial reference systems
+ are not congruent.
+ apply_input_mask : bool
+ If True, mask the input Raster according to data.mask.
+ apply_output_mask : bool
+ If True, mask the output Raster according to target_view.mask.
+ affine : affine.Affine
+ Affine transformation matrix (overrides target_view.affine)
+ shape : tuple of ints (length 2)
+ Shape of desired Raster (overrides target_view.shape)
+ crs : pyproj.Proj
+ Coordinate reference system (overrides target_view.crs)
+ mask : np.ndarray or Raster
+ Boolean array to mask output (overrides target_view.mask)
+ nodata : int or float
+ Value indicating no data in output Raster (overrides target_view.nodata)
+ dtype : numpy datatype
+ Desired datatype of the output array.
+
+ Additional keyword arguments (**kwargs) are passed to np.savetxt
+ """
+ if target_view is None:
+ target_view = data.viewfinder
+ data = View.view(data, target_view, interpolation=interpolation,
+ apply_input_mask=apply_input_mask,
+ apply_output_mask=apply_output_mask, affine=affine,
+ shape=shape, crs=crs, mask=mask, nodata=nodata,
+ dtype=dtype)
+ try:
+ assert (abs(data.affine.a) == abs(data.affine.e))
+ except:
+ raise ValueError('Raster cells must be square.')
+ nodata = data.nodata
+ shape = data.shape
+ bbox = data.bbox
+ cellsize = abs(data.affine.a)
+ # TODO: This breaks if cells are not square; issue with ASCII format
+ header_space = 9*' '
+ header = (("ncols{0}{1}\nnrows{0}{2}\nxllcorner{0}{3}\n"
+ "yllcorner{0}{4}\ncellsize{0}{5}\nNODATA_value{0}{6}")
+ .format(header_space,
+ shape[1],
+ shape[0],
+ bbox[0],
+ bbox[1],
+ cellsize,
+ nodata))
+ if fmt is None:
+ if np.issubdtype(data.dtype, np.integer):
+ fmt = '%d'
+ else:
+ fmt = '%.18e'
+ np.savetxt(file_name, data, fmt=fmt, delimiter=delimiter,
+ header=header, comments='', **kwargs)
+
+def to_raster(data, file_name, target_view=None, profile=None, blockxsize=256,
+ blockysize=256, interpolation='nearest', apply_input_mask=False,
+ apply_output_mask=True, affine=None, shape=None, crs=None,
+ mask=None, nodata=None, dtype=None, **kwargs):
+ """
+ Writes gridded data to a raster.
+
+ Parameters
+ ----------
+ data: Raster
+ Raster dataset to write.
+ file_name : str
+ Name of file or path to write to.
+ target_view : ViewFinder
+ ViewFinder to use when writing data. Defaults to data.viewfinder.
+ profile : dict
+ Profile of driver for writing data. See rasterio documentation.
+ blockxsize : int
+ Size of blocks in horizontal direction. See rasterio documentation.
+ blockysize : int
+ Size of blocks in vertical direction. See rasterio documentation.
+ interpolation : 'nearest', 'linear'
+ Interpolation method to be used if spatial reference systems
+ are not congruent.
+ apply_input_mask : bool
+ If True, mask the input Raster according to data.mask.
+ apply_output_mask : bool
+ If True, mask the output Raster according to target_view.mask.
+ affine : affine.Affine
+ Affine transformation matrix (overrides target_view.affine)
+ shape : tuple of ints (length 2)
+ Shape of desired Raster (overrides target_view.shape)
+ crs : pyproj.Proj
+ Coordinate reference system (overrides target_view.crs)
+ mask : np.ndarray or Raster
+ Boolean array to mask output (overrides target_view.mask)
+ nodata : int or float
+ Value indicating no data in output Raster (overrides target_view.nodata)
+ dtype : numpy datatype
+ Desired datatype of the output array.
+ """
+ if target_view is None:
+ target_view = data.viewfinder
+ data = View.view(data, target_view, interpolation=interpolation,
+ apply_input_mask=apply_input_mask,
+ apply_output_mask=apply_output_mask, affine=affine,
+ shape=shape, crs=crs, mask=mask, nodata=nodata,
+ dtype=dtype)
+ height, width = data.shape
+ default_blockx = width
+ default_profile = {
+ 'driver' : 'GTiff',
+ 'blockxsize' : blockxsize,
+ 'blockysize' : blockysize,
+ 'count': 1,
+ 'tiled' : True
+ }
+ if not profile:
+ profile = default_profile
+ profile_updates = {
+ 'crs' : data.crs.srs,
+ 'transform' : data.affine,
+ 'dtype' : data.dtype.name,
+ 'nodata' : data.nodata,
+ 'height' : height,
+ 'width' : width
+ }
+ profile.update(profile_updates)
+ with rasterio.open(file_name, 'w', **profile) as dst:
+ dst.write(np.asarray(data), 1)
+
diff --git a/pysheds/pgrid.py b/pysheds/pgrid.py
new file mode 100644
index 0000000..82574c1
--- /dev/null
+++ b/pysheds/pgrid.py
@@ -0,0 +1,3557 @@
+import sys
+import ast
+import copy
+import warnings
+import pyproj
+import numpy as np
+import pandas as pd
+import geojson
+from affine import Affine
+from distutils.version import LooseVersion
+try:
+ import scipy.sparse
+ import scipy.spatial
+ from scipy.sparse import csgraph
+ import scipy.interpolate
+ _HAS_SCIPY = True
+except:
+ _HAS_SCIPY = False
+try:
+ import skimage.measure
+ import skimage.transform
+ import skimage.morphology
+ _HAS_SKIMAGE = True
+except:
+ _HAS_SKIMAGE = False
+try:
+ import rasterio
+ import rasterio.features
+ _HAS_RASTERIO = True
+except:
+ _HAS_RASTERIO = False
+
+_OLD_PYPROJ = LooseVersion(pyproj.__version__) < LooseVersion('2.2')
+_pyproj_crs = lambda Proj: Proj.crs if not _OLD_PYPROJ else Proj
+_pyproj_crs_is_geographic = 'is_latlong' if _OLD_PYPROJ else 'is_geographic'
+_pyproj_init = '+init=epsg:4326' if _OLD_PYPROJ else 'epsg:4326'
+
+from pysheds.pview import Raster
+from pysheds.pview import BaseViewFinder, RegularViewFinder, IrregularViewFinder
+from pysheds.pview import RegularGridViewer, IrregularGridViewer
+
+class Grid(object):
+ """
+ Container class for holding and manipulating gridded data.
+
+ Attributes
+ ==========
+ affine : Affine transformation matrix (uses affine module)
+ shape : The shape of the grid (number of rows, number of columns).
+ bbox : The geographical bounding box of the current view of the gridded data
+ (xmin, ymin, xmax, ymax).
+ mask : A boolean array used to mask certain grid cells in the bbox;
+ may be used to indicate which cells lie inside a catchment.
+
+ Methods
+ =======
+ --------
+ File I/O
+ --------
+ add_gridded_data : Add a gridded dataset (dem, flowdir, accumulation)
+ to Grid instance (generic method).
+ read_ascii : Read an ascii grid from a file and add it to a
+ Grid instance.
+ read_raster : Read a raster file and add the data to a Grid
+ instance.
+ from_ascii : Initializes Grid from an ascii file.
+ from_raster : Initializes Grid from a raster file.
+ to_ascii : Writes current "view" of gridded dataset(s) to ascii file.
+ ----------
+ Hydrologic
+ ----------
+ flowdir : Generate a flow direction grid from a given digital elevation
+ dataset (dem). Does not currently handle flats.
+ catchment : Delineate the watershed for a given pour point (x, y)
+ or (column, row).
+ accumulation : Compute the number of cells upstream of each cell.
+ flow_distance : Compute the distance (in cells) from each cell to the
+ outlet.
+ extract_river_network : Extract river segments from a catchment.
+ fraction : Generate the fractional contributing area for a coarse
+ scale flow direction grid based on a fine-scale flow
+ direction grid.
+ ---------------
+ Data Processing
+ ---------------
+ view : Returns a "view" of a dataset defined by an affine transformation
+ self.affine (can optionally be masked with self.mask).
+ set_bbox : Sets the bbox of the current "view" (self.bbox).
+ set_nodata : Sets the nodata value for a given dataset.
+ grid_indices : Returns arrays containing the geographic coordinates
+ of the grid's rows and columns for the current "view".
+ nearest_cell : Returns the index (column, row) of the cell closest
+ to a given geographical coordinate (x, y).
+ clip_to : Clip the bbox to the smallest area containing all non-
+ null gridcells for a provided dataset.
+ """
+
+ def __init__(self, viewfinder=None):
+ if viewfinder is not None:
+ try:
+ assert issubclass(viewfinder, BaseViewFinder)
+ except:
+ raise TypeError('viewfinder must be an instance of RegularViewFinder or IrregularViewFinder.')
+ self.viewfinder = viewfinder
+ else:
+ self.viewfinder = RegularViewFinder(**self.defaults)
+ self.grids = []
+
+ @property
+ def defaults(self):
+ props = {
+ 'affine' : Affine(1.,0.,0.,0.,1.,0.),
+ 'shape' : (1,1),
+ 'nodata' : 0,
+ 'crs' : pyproj.Proj(_pyproj_init),
+ }
+ return props
+
+ def add_gridded_data(self, data, data_name, affine=None, shape=None, crs=None,
+ nodata=None, mask=None, metadata={}):
+ """
+ A generic method for adding data into a Grid instance.
+ Inserts data into a named attribute of Grid (name of attribute
+ determined by keyword 'data_name').
+
+ Parameters
+ ----------
+ data : numpy ndarray
+ Data to be inserted into Grid instance.
+ data_name : str
+ Name of dataset. Will determine the name of the attribute
+ representing the gridded data.
+ affine : affine.Affine
+ Affine transformation matrix defining the cell size and bounding
+ box (see the affine module for more information).
+ shape : tuple of int (length 2)
+ Shape (rows, columns) of data.
+ crs : dict
+ Coordinate reference system of gridded data.
+ nodata : int or float
+ Value indicating no data in the input array.
+ mask : numpy ndarray
+ Boolean array indicating which cells should be masked.
+ metadata : dict
+ Other attributes describing dataset, such as direction
+ mapping for flow direction files. e.g.:
+ metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
+ 'routing' : 'd8'}
+ """
+ if isinstance(data, Raster):
+ if affine is None:
+ affine = data.affine
+ shape = data.shape
+ crs = data.crs
+ nodata = data.nodata
+ mask = data.mask
+ else:
+ if mask is None:
+ mask = np.ones(shape, dtype=np.bool)
+ if shape is None:
+ shape = data.shape
+ if not isinstance(data, np.ndarray):
+ raise TypeError('Input data must be ndarray')
+ # if there are no datasets, initialize bbox, shape,
+ # cellsize and crs based on incoming data
+ if len(self.grids) < 1:
+ # check validity of shape
+ if ((hasattr(shape, "__len__")) and (not isinstance(shape, str))
+ and (len(shape) == 2) and (isinstance(sum(shape), int))):
+ shape = tuple(shape)
+ else:
+ raise TypeError('shape must be a tuple of ints of length 2.')
+ if crs is not None:
+ if isinstance(crs, pyproj.Proj):
+ pass
+ elif isinstance(crs, dict) or isinstance(crs, str):
+ crs = pyproj.Proj(crs)
+ else:
+ raise TypeError('Valid crs required')
+ if isinstance(affine, Affine):
+ pass
+ else:
+ raise TypeError('affine transformation matrix required')
+ # initialize instance metadata
+ self.affine = affine
+ self.shape = shape
+ self.crs = crs
+ self.nodata = nodata
+ self.mask = mask
+ # assign new data to attribute; record nodata value
+ viewfinder = RegularViewFinder(affine=affine, shape=shape, mask=mask, nodata=nodata,
+ crs=crs)
+ data = Raster(data, viewfinder, metadata=metadata)
+ self.grids.append(data_name)
+ setattr(self, data_name, data)
+
+ def read_ascii(self, data, data_name, skiprows=6, crs=pyproj.Proj(_pyproj_init),
+ xll='lower', yll='lower', metadata={}, **kwargs):
+ """
+ Reads data from an ascii file into a named attribute of Grid
+ instance (name of attribute determined by 'data_name').
+
+ Parameters
+ ----------
+ data : str
+ File name or path.
+ data_name : str
+ Name of dataset. Will determine the name of the attribute
+ representing the gridded data.
+ skiprows : int (optional)
+ The number of rows taken up by the header (defaults to 6).
+ crs : pyroj.Proj
+ Coordinate reference system of ascii data.
+ xll : 'lower' or 'center' (str)
+ Whether XLLCORNER or XLLCENTER is used.
+ yll : 'lower' or 'center' (str)
+ Whether YLLCORNER or YLLCENTER is used.
+ metadata : dict
+ Other attributes describing dataset, such as direction
+ mapping for flow direction files. e.g.:
+ metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
+ 'routing' : 'd8'}
+
+ Additional keyword arguments are passed to numpy.loadtxt()
+ """
+ with open(data) as header:
+ ncols = int(header.readline().split()[1])
+ nrows = int(header.readline().split()[1])
+ xll = ast.literal_eval(header.readline().split()[1])
+ yll = ast.literal_eval(header.readline().split()[1])
+ cellsize = ast.literal_eval(header.readline().split()[1])
+ nodata = ast.literal_eval(header.readline().split()[1])
+ shape = (nrows, ncols)
+ data = np.loadtxt(data, skiprows=skiprows, **kwargs)
+ nodata = data.dtype.type(nodata)
+ affine = Affine(cellsize, 0, xll, 0, -cellsize, yll + nrows * cellsize)
+ self.add_gridded_data(data=data, data_name=data_name, affine=affine, shape=shape,
+ crs=crs, nodata=nodata, metadata=metadata)
+
+ def read_raster(self, data, data_name, band=1, window=None, window_crs=None,
+ metadata={}, mask_geometry=False, **kwargs):
+ """
+ Reads data from a raster file into a named attribute of Grid
+ (name of attribute determined by keyword 'data_name').
+
+ Parameters
+ ----------
+ data : str
+ File name or path.
+ data_name : str
+ Name of dataset. Will determine the name of the attribute
+ representing the gridded data.
+ band : int
+ The band number to read if multiband.
+ window : tuple
+ If using windowed reading, specify window (xmin, ymin, xmax, ymax).
+ window_crs : pyproj.Proj instance
+ Coordinate reference system of window. If None, assume it's in raster's crs.
+ mask_geometry : iterable object
+ The values must be a GeoJSON-like dict or an object that implements
+ the Python geo interface protocol (such as a Shapely Polygon).
+ metadata : dict
+ Other attributes describing dataset, such as direction
+ mapping for flow direction files. e.g.:
+ metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
+ 'routing' : 'd8'}
+
+ Additional keyword arguments are passed to rasterio.open()
+ """
+ # read raster file
+ if not _HAS_RASTERIO:
+ raise ImportError('Requires rasterio module')
+ mask = None
+ with rasterio.open(data, **kwargs) as f:
+ crs = pyproj.Proj(f.crs, preserve_units=True)
+ if window is None:
+ shape = f.shape
+ if len(f.indexes) > 1:
+ data = np.ma.filled(f.read_band(band))
+ else:
+ data = np.ma.filled(f.read())
+ affine = f.transform
+ data = data.reshape(shape)
+ else:
+ if window_crs is not None:
+ if window_crs.srs != crs.srs:
+ xmin, ymin, xmax, ymax = window
+ if _OLD_PYPROJ:
+ extent = pyproj.transform(window_crs, crs, (xmin, xmax),
+ (ymin, ymax))
+ else:
+ extent = pyproj.transform(window_crs, crs, (xmin, xmax),
+ (ymin, ymax), errcheck=True,
+ always_xy=True)
+ window = (extent[0][0], extent[1][0], extent[0][1], extent[1][1])
+ # If window crs not specified, assume it's in raster crs
+ ix_window = f.window(*window)
+ if len(f.indexes) > 1:
+ data = np.ma.filled(f.read_band(band, window=ix_window))
+ else:
+ data = np.ma.filled(f.read(window=ix_window))
+ affine = f.window_transform(ix_window)
+ data = np.squeeze(data)
+ shape = data.shape
+ if mask_geometry:
+ mask = rasterio.features.geometry_mask(mask_geometry, shape, affine, invert=True)
+ if not mask.any(): # no mask was applied if all False, out of bounds
+ warnings.warn('mask_geometry does not fall within the bounds of the raster!')
+ mask = ~mask # return mask to all True and deliver warning
+ nodata = f.nodatavals[0]
+ if nodata is not None:
+ nodata = data.dtype.type(nodata)
+ self.add_gridded_data(data=data, data_name=data_name, affine=affine, shape=shape,
+ crs=crs, nodata=nodata, mask=mask, metadata=metadata)
+
+ @classmethod
+ def from_ascii(cls, path, data_name, **kwargs):
+ newinstance = cls()
+ newinstance.read_ascii(path, data_name, **kwargs)
+ return newinstance
+
+ @classmethod
+ def from_raster(cls, path, data_name, **kwargs):
+ newinstance = cls()
+ newinstance.read_raster(path, data_name, **kwargs)
+ return newinstance
+
+ def grid_indices(self, affine=None, shape=None, col_ascending=True, row_ascending=False):
+ """
+ Return row and column coordinates of the grid based on an affine transformation and
+ a grid shape.
+
+ Parameters
+ ----------
+ affine: affine.Affine
+ Affine transformation matrix. Defualts to self.affine.
+ shape : tuple of ints (length 2)
+ The shape of the 2D array (rows, columns). Defaults
+ to self.shape.
+ col_ascending : bool
+ If True, return column coordinates in ascending order.
+ row_ascending : bool
+ If True, return row coordinates in ascending order.
+ """
+ if affine is None:
+ affine = self.affine
+ if shape is None:
+ shape = self.shape
+ y_ix = np.arange(shape[0])
+ x_ix = np.arange(shape[1])
+ if row_ascending:
+ y_ix = y_ix[::-1]
+ if not col_ascending:
+ x_ix = x_ix[::-1]
+ x, _ = affine * np.vstack([x_ix, np.zeros(shape[1])])
+ _, y = affine * np.vstack([np.zeros(shape[0]), y_ix])
+ return y, x
+
+ def view(self, data, data_view=None, target_view=None, apply_mask=True,
+ nodata=None, interpolation='nearest', as_crs=None, return_coords=False,
+ kx=3, ky=3, s=0, tolerance=1e-3, dtype=None, metadata={}):
+ """
+ Return a copy of a gridded dataset clipped to the current "view". The view is determined by
+ an affine transformation which describes the bounding box and cellsize of the grid.
+ The view will also optionally mask grid cells according to the boolean array self.mask.
+
+ Parameters
+ ----------
+ data : str or Raster
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ data_view : RegularViewFinder or IrregularViewFinder
+ The view at which the data is defined (based on an affine
+ transformation and shape). Defaults to the Raster dataset's
+ viewfinder attribute.
+ target_view : RegularViewFinder or IrregularViewFinder
+ The desired view (based on an affine transformation and shape)
+ Defaults to a viewfinder based on self.affine and self.shape.
+ apply_mask : bool
+ If True, "mask" the view using self.mask.
+ nodata : int or float
+ Value indicating no data in output array.
+ Defaults to the `nodata` attribute of the input dataset.
+ interpolation: 'nearest', 'linear', 'cubic', 'spline'
+ Interpolation method to be used. If both the input data
+ view and output data view can be defined on a regular grid,
+ all interpolation methods are available. If one
+ of the datasets cannot be defined on a regular grid, or the
+ datasets use a different CRS, only 'nearest', 'linear' and
+ 'cubic' are available.
+ as_crs: pyproj.Proj
+ Projection at which to view the data (overrides self.crs).
+ return_coords: bool
+ If True, return the coordinates corresponding to each value
+ in the output array.
+ kx, ky: int
+ Degrees of the bivariate spline, if 'spline' interpolation is desired.
+ s : float
+ Smoothing factor of the bivariate spline, if 'spline' interpolation is desired.
+ tolerance: float
+ Maximum tolerance when matching coordinates. Data coordinates
+ that cannot be matched to a target coordinate within this
+ tolerance will be masked with the nodata value in the output array.
+ dtype: numpy datatype
+ Desired datatype of the output array.
+ """
+ # Check interpolation method
+ try:
+ interpolation = interpolation.lower()
+ assert(interpolation in ('nearest', 'linear', 'cubic', 'spline'))
+ except:
+ raise ValueError("Interpolation method must be one of: "
+ "'nearest', 'linear', 'cubic', 'spline'")
+ # Parse data
+ if isinstance(data, str):
+ data = getattr(self, data)
+ if nodata is None:
+ nodata = data.nodata
+ if data_view is None:
+ data_view = data.viewfinder
+ metadata.update(data.metadata)
+ elif isinstance(data, Raster):
+ if nodata is None:
+ nodata = data.nodata
+ if data_view is None:
+ data_view = data.viewfinder
+ metadata.update(data.metadata)
+ else:
+ # If not using a named dataset, make sure the data and view are properly defined
+ try:
+ assert(isinstance(data, np.ndarray))
+ except:
+ raise
+ # TODO: Should convert array to dataset here
+ if nodata is None:
+ nodata = data_view.nodata
+ # If no target view provided, construct one based on grid parameters
+ if target_view is None:
+ target_view = RegularViewFinder(affine=self.affine, shape=self.shape,
+ mask=self.mask, crs=self.crs, nodata=nodata)
+ # If viewing at a different crs, convert coordinates
+ if as_crs is not None:
+ assert(isinstance(as_crs, pyproj.Proj))
+ target_coords = target_view.coords
+ new_coords = self._convert_grid_indices_crs(target_coords, target_view.crs, as_crs)
+ new_x, new_y = new_coords[:,1], new_coords[:,0]
+ # TODO: In general, crs conversion will yield irregular grid (though not necessarily)
+ target_view = IrregularViewFinder(coords=np.column_stack([new_y, new_x]),
+ shape=target_view.shape, crs=as_crs,
+ nodata=target_view.nodata)
+ # Specify mask
+ mask = target_view.mask
+ # Make sure views are ViewFinder instances
+ assert(issubclass(type(data_view), BaseViewFinder))
+ assert(issubclass(type(target_view), BaseViewFinder))
+ same_crs = target_view.crs.srs == data_view.crs.srs
+ # If crs does not match, convert coords of data array to target array
+ if not same_crs:
+ data_coords = data_view.coords
+ # TODO: x and y order might be different
+ new_coords = self._convert_grid_indices_crs(data_coords, data_view.crs, target_view.crs)
+ new_x, new_y = new_coords[:,1], new_coords[:,0]
+ # TODO: In general, crs conversion will yield irregular grid (though not necessarily)
+ data_view = IrregularViewFinder(coords=np.column_stack([new_y, new_x]),
+ shape=data_view.shape, crs=target_view.crs,
+ nodata=data_view.nodata)
+ # Check if data can be described by regular grid
+ data_is_grid = isinstance(data_view, RegularViewFinder)
+ view_is_grid = isinstance(target_view, RegularViewFinder)
+ # If data is on a grid, use the following speedup
+ if data_is_grid and view_is_grid:
+ # If doing nearest neighbor search, use fast sorted search
+ if interpolation == 'nearest':
+ array_view = RegularGridViewer._view_affine(data, data_view, target_view)
+ # If spline interpolation is needed, use RectBivariate
+ elif interpolation == 'spline':
+ # If latitude/longitude, use RectSphereBivariate
+ if getattr(_pyproj_crs(target_view.crs), _pyproj_crs_is_geographic):
+ array_view = RegularGridViewer._view_rectspherebivariate(data, data_view,
+ target_view,
+ x_tolerance=tolerance,
+ y_tolerance=tolerance,
+ kx=kx, ky=ky, s=s)
+ # If not latitude/longitude, use RectBivariate
+ else:
+ array_view = RegularGridViewer._view_rectbivariate(data, data_view,
+ target_view,
+ x_tolerance=tolerance,
+ y_tolerance=tolerance,
+ kx=kx, ky=ky, s=s)
+ # If some other interpolation method is needed, use griddata
+ else:
+ array_view = IrregularGridViewer._view_griddata(data, data_view, target_view,
+ method=interpolation)
+ # If either view is irregular, use griddata
+ else:
+ array_view = IrregularGridViewer._view_griddata(data, data_view, target_view,
+ method=interpolation)
+ # TODO: This could be dangerous if it returns an irregular view
+ array_view = Raster(array_view, target_view, metadata=metadata)
+ # Ensure masking is safe by checking datatype
+ if dtype is None:
+ dtype = max(np.min_scalar_type(nodata), data.dtype)
+ # For matplotlib imshow compatibility
+ if issubclass(dtype.type, np.floating):
+ dtype = max(dtype, np.dtype(np.float32))
+ array_view = array_view.astype(dtype)
+ # Apply mask
+ if apply_mask:
+ np.place(array_view, ~mask, nodata)
+ # Return output
+ if return_coords:
+ return array_view, target_view.coords
+ else:
+ return array_view
+
+ def resize(self, data, new_shape, out_suffix='_resized', inplace=True,
+ nodata_in=None, nodata_out=np.nan, apply_mask=False, ignore_metadata=True, **kwargs):
+ """
+ Resize a gridded dataset to a different shape (uses skimage.transform.resize).
+ data : str or Raster
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ new_shape: tuple of int (length 2)
+ Desired array shape.
+ out_suffix: str
+ If writing to a named attribute, the suffix to apply to the output name.
+ inplace : bool
+ If True, resized array will be written to '_'.
+ Otherwise, return the output array.
+ nodata_in : int or float
+ Value indicating no data in input array.
+ Defaults to the `nodata` attribute of the input dataset.
+ nodata_out : int or float
+ Value indicating no data in output array.
+ Defaults to np.nan.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and crs.
+ """
+ # Filter warnings due to invalid values
+ np.warnings.filterwarnings(action='ignore', message='The default mode',
+ category=UserWarning)
+ np.warnings.filterwarnings(action='ignore', message='Anti-aliasing',
+ category=UserWarning)
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ if isinstance(data, str):
+ out_name = '{0}{1}'.format(data, out_suffix)
+ else:
+ out_name = 'data_{1}'.format(out_suffix)
+ grid_props = {'nodata' : nodata_out}
+ metadata = {}
+ data = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=grid_props, ignore_metadata=ignore_metadata,
+ metadata=metadata)
+ data = skimage.transform.resize(data, new_shape, **kwargs)
+ return self._output_handler(data=data, out_name=out_name, properties=grid_props,
+ inplace=inplace, metadata=metadata)
+
+ def nearest_cell(self, x, y, affine=None, snap='corner'):
+ """
+ Returns the index of the cell (column, row) closest
+ to a given geographical coordinate.
+
+ Parameters
+ ----------
+ x : int or float
+ x coordinate.
+ y : int or float
+ y coordinate.
+ affine : affine.Affine
+ Affine transformation that defines the translation between
+ geographic x/y coordinate and array row/column coordinate.
+ Defaults to self.affine.
+ snap : str
+ Indicates the cell indexing method. If "corner", will resolve to
+ snapping the (x,y) geometry to the index of the nearest top-left
+ cell corner. If "center", will return the index of the cell that
+ the geometry falls within.
+ Returns
+ -------
+ x_i, y_i : tuple of ints
+ Column index and row index
+ """
+ if not affine:
+ affine = self.affine
+ try:
+ assert isinstance(affine, Affine)
+ except:
+ raise TypeError('affine must be an Affine instance.')
+ snap_dict = {'corner': np.around, 'center': np.floor}
+ col, row = snap_dict[snap](~affine * (x, y)).astype(int)
+ return col, row
+
+ def set_bbox(self, new_bbox):
+ """
+ Sets new bbox while maintaining the same cell dimensions. Updates
+ self.affine and self.shape. Also resets self.mask.
+
+ Note that this method rounds the given bbox to match the existing
+ cell dimensions.
+
+ Parameters
+ ----------
+ new_bbox : tuple of floats (length 4)
+ (xmin, ymin, xmax, ymax)
+ """
+ affine = self.affine
+ xmin, ymin, xmax, ymax = new_bbox
+ ul = np.around(~affine * (xmin, ymax)).astype(int)
+ lr = np.around(~affine * (xmax, ymin)).astype(int)
+ xmin, ymax = affine * tuple(ul)
+ shape = tuple(lr - ul)[::-1]
+ new_affine = Affine(affine.a, affine.b, xmin,
+ affine.d, affine.e, ymax)
+ self.affine = new_affine
+ self.shape = shape
+ #TODO: For now, simply reset mask
+ self.mask = np.ones(shape, dtype=np.bool)
+
+ def set_indices(self, new_indices):
+ """
+ Updates self.affine and self.shape to correspond to new indices representing
+ a new bounding rectangle. Also resets self.mask.
+
+ Parameters
+ ----------
+ new_indices : tuple of ints (length 4)
+ (xmin_index, ymin_index, xmax_index, ymax_index)
+ """
+ affine = self.affine
+ assert all((isinstance(ix, int) for ix in new_indices))
+ ul = np.asarray((new_indices[0], new_indices[3]))
+ lr = np.asarray((new_indices[2], new_indices[1]))
+ xmin, ymax = affine * tuple(ul)
+ shape = tuple(lr - ul)[::-1]
+ new_affine = Affine(affine.a, affine.b, xmin,
+ affine.d, affine.e, ymax)
+ self.affine = new_affine
+ self.shape = shape
+ #TODO: For now, simply reset mask
+ self.mask = np.ones(shape, dtype=np.bool)
+
+ def flowdir(self, data, out_name='dir', nodata_in=None, nodata_out=None,
+ pits=-1, flats=-1, dirmap=(64, 128, 1, 2, 4, 8, 16, 32), routing='d8',
+ inplace=True, as_crs=None, apply_mask=False, ignore_metadata=False,
+ **kwargs):
+ """
+ Generates a flow direction grid from a DEM grid.
+
+ Parameters
+ ----------
+ data : str or Raster
+ DEM data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ out_name : string
+ Name of attribute containing new flow direction array.
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ pits : int
+ Value to indicate pits in output array.
+ flats : int
+ Value to indicate flat areas in output array.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ as_crs : pyproj.Proj instance
+ CRS projection to use when computing slopes.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and crs.
+ """
+ dirmap = self._set_dirmap(dirmap, data)
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ properties = {'nodata' : nodata_out}
+ metadata = {'dirmap' : dirmap}
+ dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=properties, ignore_metadata=ignore_metadata,
+ **kwargs)
+ if nodata_in is None:
+ dem_mask = np.array([]).astype(int)
+ else:
+ if np.isnan(nodata_in):
+ dem_mask = np.where(np.isnan(dem.ravel()))[0]
+ else:
+ dem_mask = np.where(dem.ravel() == nodata_in)[0]
+ if routing.lower() == 'd8':
+ if nodata_out is None:
+ nodata_out = 0
+ return self._d8_flowdir(dem=dem, dem_mask=dem_mask, out_name=out_name,
+ nodata_in=nodata_in, nodata_out=nodata_out, pits=pits,
+ flats=flats, dirmap=dirmap, inplace=inplace, as_crs=as_crs,
+ apply_mask=apply_mask, ignore_metdata=ignore_metadata,
+ properties=properties, metadata=metadata, **kwargs)
+ elif routing.lower() == 'dinf':
+ if nodata_out is None:
+ nodata_out = np.nan
+ return self._dinf_flowdir(dem=dem, dem_mask=dem_mask, out_name=out_name,
+ nodata_in=nodata_in, nodata_out=nodata_out, pits=pits,
+ flats=flats, dirmap=dirmap, inplace=inplace, as_crs=as_crs,
+ apply_mask=apply_mask, ignore_metdata=ignore_metadata,
+ properties=properties, metadata=metadata, **kwargs)
+
+ def _d8_flowdir(self, dem=None, dem_mask=None, out_name='dir', nodata_in=None, nodata_out=0,
+ pits=-1, flats=-1, dirmap=(64, 128, 1, 2, 4, 8, 16, 32), inplace=True,
+ as_crs=None, apply_mask=False, ignore_metadata=False, properties={},
+ metadata={}, **kwargs):
+ np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
+ category=RuntimeWarning)
+ try:
+ # Make sure nothing flows to the nodata cells
+ dem.flat[dem_mask] = dem.max() + 1
+ inside = self._inside_indices(dem, mask=dem_mask)
+ inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
+ # Optionally, project DEM before computing slopes
+ if as_crs is not None:
+ indices = np.vstack(np.dstack(np.meshgrid(
+ *self.grid_indices(affine=dem.affine, shape=dem.shape),
+ indexing='ij')))
+ # TODO: Should probably use dataset crs instead of instance crs
+ indices = self._convert_grid_indices_crs(indices, dem.crs, as_crs)
+ y_sur = indices[:,0].flat[inner_neighbors]
+ x_sur = indices[:,1].flat[inner_neighbors]
+ dy = indices[:,0].flat[inside] - y_sur
+ dx = indices[:,1].flat[inside] - x_sur
+ cell_dists = np.sqrt(dx**2 + dy**2)
+ else:
+ dx = abs(dem.affine.a)
+ dy = abs(dem.affine.e)
+ ddiag = np.sqrt(dx**2 + dy**2)
+ cell_dists = (np.array([dy, ddiag, dx, ddiag, dy, ddiag, dx, ddiag])
+ .reshape(-1, 1))
+ slope = diff / cell_dists
+ # TODO: This assigns directions arbitrarily if multiple steepest paths exist
+ fdir = np.where(fdir_defined, np.argmax(slope, axis=0), -1) + 1
+ # If direction numbering isn't default, convert values of output array.
+ if dirmap != (1, 2, 3, 4, 5, 6, 7, 8):
+ fdir = np.asarray([0] + list(dirmap))[fdir]
+ pits_bool = (diff < 0).all(axis=0)
+ flats_bool = (~fdir_defined & ~pits_bool)
+ fdir[pits_bool] = pits
+ fdir[flats_bool] = flats
+ fdir_out = np.full(dem.shape, nodata_out)
+ fdir_out.flat[inside] = fdir
+ except:
+ raise
+ finally:
+ if nodata_in is not None:
+ dem.flat[dem_mask] = nodata_in
+ return self._output_handler(data=fdir_out, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+ def _dinf_flowdir(self, dem=None, dem_mask=None, out_name='dir', nodata_in=None, nodata_out=0,
+ pits=-1, flats=-1, dirmap=(64, 128, 1, 2, 4, 8, 16, 32), inplace=True,
+ as_crs=None, apply_mask=False, ignore_metadata=False, properties={},
+ metadata={}, **kwargs):
+ # Filter warnings due to invalid values
+ np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
+ category=RuntimeWarning)
+ try:
+ # Make sure nothing flows to the nodata cells
+ dem.flat[dem_mask] = dem.max() + 1
+ inside = self._inside_indices(dem)
+ inner_neighbors = self._select_surround_ravel(inside, dem.shape).T
+ if as_crs is not None:
+ indices = np.vstack(np.dstack(np.meshgrid(
+ *self.grid_indices(affine=dem.affine, shape=dem.shape),
+ indexing='ij')))
+ # TODO: Should probably use dataset crs instead of instance crs
+ indices = self._convert_grid_indices_crs(indices, dem.crs, as_crs)
+ y_sur = indices[:,0].flat[inner_neighbors]
+ x_sur = indices[:,1].flat[inner_neighbors]
+ dy = indices[:,0].flat[inside] - y_sur
+ dx = indices[:,1].flat[inside] - x_sur
+ cell_dists = np.sqrt(dx**2 + dy**2)
+ else:
+ dx = abs(dem.affine.a)
+ dy = abs(dem.affine.e)
+ ddiag = np.sqrt(dx**2 + dy**2)
+ # TODO: Inconsistent with d8, which reshapes
+ cell_dists = (np.array([dy, ddiag, dx, ddiag, dy, ddiag, dx, ddiag]))
+ # TODO: This array switching is unnecessary
+ inner_neighbors = inner_neighbors[[2, 1, 0, 7, 6, 5, 4, 3]]
+ cell_dists = cell_dists[[2, 1, 0, 7, 6, 5, 4, 3]]
+ R = np.zeros((8, inside.size))
+ S = np.zeros((8, inside.size))
+ dirs = range(8)
+ e1s = [0, 2, 2, 4, 4, 6, 6, 0]
+ e2s = [1, 1, 3, 3, 5, 5, 7, 7]
+ d1s = [0, 2, 2, 4, 4, 6, 6, 0]
+ d2s = [2, 0, 4, 2, 6, 4, 0, 6]
+ for i, e1_i, e2_i, d1_i, d2_i in zip(dirs, e1s, e2s, d1s, d2s):
+ r, s = self.facet_flow(dem.flat[inside],
+ dem.flat[inner_neighbors[e1_i]],
+ dem.flat[inner_neighbors[e2_i]],
+ d1=cell_dists[d1_i],
+ d2=cell_dists[d2_i])
+ R[i, :] = r
+ S[i, :] = s
+ S_max = np.max(S, axis=0)
+ k_max = np.argmax(S, axis=0)
+ del S
+ ac = np.asarray([0, 1, 1, 2, 2, 3, 3, 4])
+ af = np.asarray([1, -1, 1, -1, 1, -1, 1, -1])
+ R = (af[k_max] * R[k_max, np.arange(R.shape[-1])]) + (ac[k_max] * np.pi / 2)
+ R[S_max < 0] = pits
+ R[S_max == 0] = flats
+ fdir_out = np.full(dem.shape, nodata_out, dtype=float)
+ # TODO: Should use .flat[inside] instead of [1:-1]?
+ fdir_out[1:-1, 1:-1] = R.reshape(dem.shape[0] - 2, dem.shape[1] - 2)
+ fdir_out = fdir_out % (2 * np.pi)
+ except:
+ raise
+ finally:
+ if nodata_in is not None:
+ dem.flat[dem_mask] = nodata_in
+ return self._output_handler(data=fdir_out, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+ def facet_flow(self, e0, e1, e2, d1=1, d2=1):
+ s1 = (e0 - e1)/d1
+ s2 = (e1 - e2)/d2
+ r = np.arctan2(s2, s1)
+ s = np.hypot(s1, s2)
+ diag_angle = np.arctan2(d2, d1)
+ diag_distance = np.hypot(d1, d2)
+ b0 = (r < 0)
+ b1 = (r > diag_angle)
+ r[b0] = 0
+ s[b0] = s1[b0]
+ if isinstance(diag_angle, np.ndarray):
+ r[b1] = diag_angle[b1]
+ else:
+ r[b1] = diag_angle
+ s[b1] = ((e0 - e2)/diag_distance)[b1]
+ return r, s
+
+ def catchment(self, x, y, data, pour_value=None, out_name='catch', dirmap=None,
+ nodata_in=None, nodata_out=0, xytype='index', routing='d8',
+ recursionlimit=15000, inplace=True, apply_mask=False, ignore_metadata=False,
+ snap='corner', **kwargs):
+ """
+ Delineates a watershed from a given pour point (x, y).
+
+ Parameters
+ ----------
+ x : int or float
+ x coordinate of pour point
+ y : int or float
+ y coordinate of pour point
+ data : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ pour_value : int or None
+ If not None, value to represent pour point in catchment
+ grid (required by some programs).
+ out_name : string
+ Name of attribute containing new catchment array.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ xytype : 'index' or 'label'
+ How to interpret parameters 'x' and 'y'.
+ 'index' : x and y represent the column and row
+ indices of the pour point.
+ 'label' : x and y represent geographic coordinates
+ (will be passed to self.nearest_cell).
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions
+ recursionlimit : int
+ Recursion limit--may need to be raised if
+ recursion limit is reached.
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and crs.
+ snap : str
+ Function to use on array for indexing:
+ 'corner' : numpy.around()
+ 'center' : numpy.floor()
+ """
+ # TODO: Why does this use set_dirmap but flowdir doesn't?
+ dirmap = self._set_dirmap(dirmap, data)
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ properties = {'nodata' : nodata_out}
+ # TODO: This will overwrite metadata if provided
+ metadata = {'dirmap' : dirmap}
+ # initialize array to collect catchment cells
+ fdir = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=properties, ignore_metadata=ignore_metadata,
+ **kwargs)
+ xmin, ymin, xmax, ymax = fdir.bbox
+ if xytype in ('label', 'coordinate'):
+ if (x < xmin) or (x > xmax) or (y < ymin) or (y > ymax):
+ raise ValueError('Pour point ({}, {}) is out of bounds for dataset with bbox {}.'
+ .format(x, y, (xmin, ymin, xmax, ymax)))
+ elif xytype == 'index':
+ if (x < 0) or (y < 0) or (x >= fdir.shape[1]) or (y >= fdir.shape[0]):
+ raise ValueError('Pour point ({}, {}) is out of bounds for dataset with shape {}.'
+ .format(x, y, fdir.shape))
+ if routing.lower() == 'd8':
+ return self._d8_catchment(x, y, fdir=fdir, pour_value=pour_value, out_name=out_name,
+ dirmap=dirmap, nodata_in=nodata_in, nodata_out=nodata_out,
+ xytype=xytype, recursionlimit=recursionlimit, inplace=inplace,
+ apply_mask=apply_mask, ignore_metadata=ignore_metadata,
+ properties=properties, metadata=metadata, snap=snap, **kwargs)
+ elif routing.lower() == 'dinf':
+ return self._dinf_catchment(x, y, fdir=fdir, pour_value=pour_value, out_name=out_name,
+ dirmap=dirmap, nodata_in=nodata_in, nodata_out=nodata_out,
+ xytype=xytype, recursionlimit=recursionlimit, inplace=inplace,
+ apply_mask=apply_mask, ignore_metadata=ignore_metadata,
+ properties=properties, metadata=metadata, **kwargs)
+
+ def _d8_catchment(self, x, y, fdir=None, pour_value=None, out_name='catch', dirmap=None,
+ nodata_in=None, nodata_out=0, xytype='index', recursionlimit=15000,
+ inplace=True, apply_mask=False, ignore_metadata=False, properties={},
+ metadata={}, snap='corner', **kwargs):
+
+ # Vectorized Recursive algorithm:
+ # for each cell j, recursively search through grid to determine
+ # if surrounding cells are in the contributing area, then add
+ # flattened indices to self.collect
+ def d8_catchment_search(cells):
+ nonlocal collect
+ nonlocal fdir
+ collect.extend(cells)
+ selection = self._select_surround_ravel(cells, fdir.shape)
+ # TODO: Why use np.where here?
+ next_idx = selection[(fdir.flat[selection] == r_dirmap)]
+ if next_idx.any():
+ return d8_catchment_search(next_idx)
+ try:
+ # Pad the rim
+ left, right, top, bottom = self._pop_rim(fdir, nodata=nodata_in)
+ # get shape of padded flow direction array, then flatten
+ # if xytype is 'label', delineate catchment based on cell nearest
+ # to given geographic coordinate
+ # Valid if the dataset is a view.
+ if xytype == 'label':
+ x, y = self.nearest_cell(x, y, fdir.affine, snap)
+ # get the flattened index of the pour point
+ pour_point = np.ravel_multi_index(np.array([y, x]),
+ fdir.shape)
+ # reorder direction mapping to work with select_surround_ravel()
+ r_dirmap = np.array(dirmap)[[4, 5, 6, 7, 0, 1, 2, 3]].tolist()
+ pour_point = np.array([pour_point])
+ # set recursion limit (needed for large datasets)
+ sys.setrecursionlimit(recursionlimit)
+ # call catchment search starting at the pour point
+ collect = []
+ d8_catchment_search(pour_point)
+ # initialize output array
+ outcatch = np.zeros(fdir.shape, dtype=int)
+ # if nodata is not 0, replace 0 with nodata value in output array
+ if nodata_out != 0:
+ np.place(outcatch, outcatch == 0, nodata_out)
+ # set values of output array based on 'collected' cells
+ outcatch.flat[collect] = fdir.flat[collect]
+ # if pour point needs to be a special value, set it
+ if pour_value is not None:
+ outcatch[y, x] = pour_value
+ except:
+ raise
+ finally:
+ # reset recursion limit
+ sys.setrecursionlimit(1000)
+ self._replace_rim(fdir, left, right, top, bottom)
+ return self._output_handler(data=outcatch, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+ def _dinf_catchment(self, x, y, fdir=None, pour_value=None, out_name='catch', dirmap=None,
+ nodata_in=None, nodata_out=0, xytype='index', recursionlimit=15000,
+ inplace=True, apply_mask=False, ignore_metadata=False, properties={},
+ metadata={}, snap='corner', **kwargs):
+ # Filter warnings due to invalid values
+ np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
+ category=RuntimeWarning)
+ # Vectorized Recursive algorithm:
+ # for each cell j, recursively search through grid to determine
+ # if surrounding cells are in the contributing area, then add
+ # flattened indices to self.collect
+ def dinf_catchment_search(cells):
+ nonlocal domain
+ nonlocal unique
+ nonlocal collect
+ nonlocal visited
+ nonlocal fdir_0
+ nonlocal fdir_1
+ unique[cells] = True
+ cells = domain[unique]
+ unique.fill(False)
+ collect.extend(cells)
+ visited.flat[cells] = True
+ selection = self._select_surround_ravel(cells, fdir.shape)
+ points_to = ((fdir_0.flat[selection] == r_dirmap) |
+ (fdir_1.flat[selection] == r_dirmap))
+ unvisited = (~(visited.flat[selection]))
+ next_idx = selection[points_to & unvisited]
+ if next_idx.any():
+ return dinf_catchment_search(next_idx)
+
+ try:
+ # Split dinf flowdir
+ fdir_0, fdir_1, prop_0, prop_1 = self.angle_to_d8(fdir, dirmap=dirmap)
+ # Find invalid cells
+ invalid_cells = ((fdir < 0) | (fdir > (np.pi * 2)))
+ # Pad the rim
+ left_0, right_0, top_0, bottom_0 = self._pop_rim(fdir_0, nodata=nodata_in)
+ left_1, right_1, top_1, bottom_1 = self._pop_rim(fdir_1, nodata=nodata_in)
+ # Ensure proportion of flow is never zero
+ fdir_0.flat[prop_0 == 0] = fdir_1.flat[prop_0 == 0]
+ fdir_1.flat[prop_1 == 0] = fdir_0.flat[prop_1 == 0]
+ # Set nodata cells to zero
+ fdir_0[invalid_cells] = 0
+ fdir_1[invalid_cells] = 0
+ # Create indexing arrays for convenience
+ domain = np.arange(fdir.size, dtype=np.min_scalar_type(fdir.size))
+ unique = np.zeros(fdir.size, dtype=np.bool)
+ visited = np.zeros(fdir.size, dtype=np.bool)
+ # if xytype is 'label', delineate catchment based on cell nearest
+ # to given geographic coordinate
+ # TODO: This relies on the bbox of the grid instance, not the dataset
+ # Valid if the dataset is a view.
+ if xytype == 'label':
+ x, y = self.nearest_cell(x, y, fdir.affine, snap)
+ # get the flattened index of the pour point
+ pour_point = np.ravel_multi_index(np.array([y, x]),
+ fdir.shape)
+ # reorder direction mapping to work with select_surround_ravel()
+ r_dirmap = np.array(dirmap)[[4, 5, 6, 7, 0, 1, 2, 3]].tolist()
+ pour_point = np.array([pour_point])
+ # set recursion limit (needed for large datasets)
+ sys.setrecursionlimit(recursionlimit)
+ # call catchment search starting at the pour point
+ collect = []
+ dinf_catchment_search(pour_point)
+ del fdir_0
+ del fdir_1
+ # initialize output array
+ outcatch = np.full(fdir.shape, nodata_out)
+ # set values of output array based on 'collected' cells
+ outcatch.flat[collect] = fdir.flat[collect]
+ # if pour point needs to be a special value, set it
+ if pour_value is not None:
+ outcatch[y, x] = pour_value
+ except:
+ raise
+ finally:
+ # reset recursion limit
+ sys.setrecursionlimit(1000)
+ return self._output_handler(data=outcatch, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+ def angle_to_d8(self, angle, dirmap=(64, 128, 1, 2, 4, 8, 16, 32)):
+ mod = np.pi/4
+ c0_order = [2, 1, 0, 7, 6, 5, 4, 3]
+ c1_order = [1, 0, 7, 6, 5, 4, 3, 2]
+ c0 = np.asarray(np.asarray(dirmap)[c0_order].tolist() + [0], dtype=np.uint8)
+ c1 = np.asarray(np.asarray(dirmap)[c1_order].tolist() + [0], dtype=np.uint8)
+ zmod = angle % (mod)
+ zfloor = (angle // mod)
+ zfloor[np.isnan(zfloor)] = 8
+ zfloor = zfloor.astype(np.uint8)
+ prop_1 = (zmod / mod).ravel()
+ prop_0 = 1 - prop_1
+ prop_0[np.isnan(prop_0)] = 0
+ prop_1[np.isnan(prop_1)] = 0
+ fdir_0 = c0.flat[zfloor]
+ fdir_1 = c1.flat[zfloor]
+ return fdir_0, fdir_1, prop_0, prop_1
+
+ # def fraction(self, other, nodata=0, out_name='frac', inplace=True):
+ # """
+ # Generates a grid representing the fractional contributing area for a
+ # coarse-scale flow direction grid.
+
+ # Parameters
+ # ----------
+ # other : Grid instance
+ # Another Grid instance containing fine-scale flow direction
+ # data. The ratio of self.cellsize/other.cellsize must be a
+ # positive integer. Grid cell boundaries must have some overlap.
+ # Must have attributes 'dir' and 'catch' (i.e. must have a flow
+ # direction grid, along with a delineated catchment).
+ # nodata : int or float
+ # Value to indicate no data in output array.
+ # inplace : bool (optional)
+ # If True, appends fraction grid to attribute 'frac'.
+ # """
+ # # check for required attributes in self and other
+ # raise NotImplementedError('fraction is currently not implemented.')
+ # assert hasattr(self, 'dir')
+ # assert hasattr(other, 'dir')
+ # assert hasattr(other, 'catch')
+ # # set scale ratio
+ # raw_ratio = self.cellsize / other.cellsize
+ # if np.allclose(int(round(raw_ratio)), raw_ratio):
+ # cell_ratio = int(round(raw_ratio))
+ # else:
+ # raise ValueError('Ratio of cell sizes must be an integer')
+ # # create DataFrames for self and other with geographic coordinates
+ # # as row and column labels. entries in selfdf represent cell indices.
+ # selfdf = pd.DataFrame(
+ # np.arange(self.view('dir', apply_mask=False).size).reshape(self.shape),
+ # index=np.linspace(self.bbox[1], self.bbox[3],
+ # self.shape[0], endpoint=False)[::-1],
+ # columns=np.linspace(self.bbox[0], self.bbox[2],
+ # self.shape[1], endpoint=False)
+ # )
+ # otherrows, othercols = self.grid_indices(other.affine, other.shape)
+ # # reindex self to other based on column labels and fill nulls with
+ # # nearest neighbor
+ # result = (selfdf.reindex(otherrows, method='nearest')
+ # .reindex(othercols, axis=1, method='nearest'))
+ # initial_counts = np.bincount(result.values.ravel(),
+ # minlength=selfdf.size).astype(float)
+ # # mask cells not in catchment of 'other'
+ # result = result.values[np.where(other.view('catch') !=
+ # other.grid_props['catch']['nodata'], True, False)]
+ # final_counts = np.bincount(result, minlength=selfdf.size).astype(float)
+ # # count remaining indices and divide by the original number of indices
+ # result = (final_counts / initial_counts).reshape(selfdf.shape)
+ # # take care of nans
+ # if np.isnan(result).any():
+ # result = pd.DataFrame(result).fillna(0).values.astype(float)
+ # # replace 0 with nodata value
+ # if nodata != 0:
+ # np.place(result, result == 0, nodata)
+ # private_props = {'nodata' : nodata}
+ # grid_props = self._generate_grid_props(**private_props)
+ # return self._output_handler(result, inplace, out_name=out_name, **grid_props)
+
+ def accumulation(self, data, weights=None, dirmap=None, nodata_in=None, nodata_out=0, efficiency=None,
+ out_name='acc', routing='d8', inplace=True, pad=False, apply_mask=False,
+ ignore_metadata=False, **kwargs):
+ """
+ Generates an array of flow accumulation, where cell values represent
+ the number of upstream cells.
+
+ Parameters
+ ----------
+ data : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ weights: numpy ndarray
+- Array of weights to be applied to each accumulation cell. Must
+- be same size as data.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ efficiency: numpy ndarray
+ transport efficiency, relative correction factor applied to the
+ outflow of each cell
+ nodata will be set to 1, i.e. no correction
+ Must be same size as data.
+ nodata_in : int or float
+ Value to indicate nodata in input array. If using a named dataset, will
+ default to the 'nodata' value of the named dataset. If using an ndarray,
+ will default to 0.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ out_name : string
+ Name of attribute containing new accumulation array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ pad : bool
+ If True, pad the rim of the input array with zeros. Else, ignore
+ the outer rim of cells in the computation.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and crs.
+ """
+ dirmap = self._set_dirmap(dirmap, data)
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ properties = {'nodata' : nodata_out}
+ # TODO: This will overwrite any provided metadata
+ metadata = {}
+ fdir = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=properties,
+ ignore_metadata=ignore_metadata, **kwargs)
+
+ # something for the future
+ #eff = self._input_handler(efficiency, apply_mask=apply_mask, properties=properties,
+ # ignore_metadata=ignore_metadata, **kwargs)
+ # default efficiency for nodata is 1
+ #eff[eff==self._check_nodata_in(efficiency, None)] = 1
+
+ if routing.lower() == 'd8':
+ return self._d8_accumulation(fdir=fdir, weights=weights, dirmap=dirmap, efficiency=efficiency,
+ nodata_in=nodata_in, nodata_out=nodata_out,
+ out_name=out_name, inplace=inplace, pad=pad,
+ apply_mask=apply_mask, ignore_metadata=ignore_metadata,
+ properties=properties, metadata=metadata, **kwargs)
+ elif routing.lower() == 'dinf':
+ return self._dinf_accumulation(fdir=fdir, weights=weights, dirmap=dirmap,efficiency=efficiency,
+ nodata_in=nodata_in, nodata_out=nodata_out,
+ out_name=out_name, inplace=inplace, pad=pad,
+ apply_mask=apply_mask, ignore_metadata=ignore_metadata,
+ properties=properties, metadata=metadata, **kwargs)
+
+ def _d8_accumulation(self, fdir=None, weights=None, dirmap=None, nodata_in=None, nodata_out=0,efficiency=None,
+ out_name='acc', inplace=True, pad=False, apply_mask=False,
+ ignore_metadata=False, properties={}, metadata={}, **kwargs):
+ # Pad the rim
+ if pad:
+ fdir = np.pad(fdir, (1,1), mode='constant', constant_values=0)
+ else:
+ left, right, top, bottom = self._pop_rim(fdir, nodata=0)
+ mintype = np.min_scalar_type(fdir.size)
+ fdir_orig_type = fdir.dtype
+ # Construct flat index onto flow direction array
+ domain = np.arange(fdir.size, dtype=mintype)
+ try:
+ if nodata_in is None:
+ nodata_cells = np.zeros_like(fdir).astype(bool)
+ else:
+ if np.isnan(nodata_in):
+ nodata_cells = (np.isnan(fdir))
+ else:
+ nodata_cells = (fdir == nodata_in)
+ invalid_cells = ~np.in1d(fdir.ravel(), dirmap)
+ invalid_entries = fdir.flat[invalid_cells]
+ fdir.flat[invalid_cells] = 0
+ # Ensure consistent types
+ fdir = fdir.astype(mintype)
+ # Set nodata cells to zero
+ fdir[nodata_cells] = 0
+ # Get matching of start and end nodes
+ startnodes, endnodes = self._construct_matching(fdir, domain,
+ dirmap=dirmap)
+ if weights is not None:
+ assert(weights.size == fdir.size)
+ # TODO: Why flatten? Does this prevent weights from being modified?
+ acc = weights.flatten()
+ else:
+ acc = (~nodata_cells).ravel().astype(int)
+
+ if efficiency is not None:
+ assert(efficiency.size == fdir.size)
+ eff = efficiency.flatten() # must be flattened to avoid IndexError below
+ acc = acc.astype(float)
+ eff_max, eff_min = np.max(eff), np.min(eff)
+ assert((eff_max<=1) and (eff_min>=0))
+
+ indegree = np.bincount(endnodes)
+ indegree = indegree.reshape(acc.shape).astype(np.uint8)
+ startnodes = startnodes[(indegree == 0)]
+ endnodes = fdir.flat[startnodes]
+ # separate for loop to avoid performance hit when
+ # efficiency is None
+ if efficiency is None: # no efficiency
+ for _ in range(fdir.size):
+ if endnodes.any():
+ np.add.at(acc, endnodes, acc[startnodes])
+ np.subtract.at(indegree, endnodes, 1)
+ startnodes = np.unique(endnodes)
+ startnodes = startnodes[indegree[startnodes] == 0]
+ endnodes = fdir.flat[startnodes]
+ else:
+ break
+ else: # apply efficiency
+ for _ in range(fdir.size):
+ if endnodes.any():
+ # we need flattened efficiency, otherwise IndexError
+ np.add.at(acc, endnodes, acc[startnodes] * eff[startnodes])
+ np.subtract.at(indegree, endnodes, 1)
+ startnodes = np.unique(endnodes)
+ startnodes = startnodes[indegree[startnodes] == 0]
+ endnodes = fdir.flat[startnodes]
+ else:
+ break
+ # TODO: Hacky: should probably fix this
+ acc[0] = 1
+ # Reshape and offset accumulation
+ acc = np.reshape(acc, fdir.shape)
+ if pad:
+ acc = acc[1:-1, 1:-1]
+ except:
+ raise
+ finally:
+ # Clean up
+ self._unflatten_fdir(fdir, domain, dirmap)
+ fdir = fdir.astype(fdir_orig_type)
+ fdir.flat[invalid_cells] = invalid_entries
+ if nodata_in is not None:
+ fdir[nodata_cells] = nodata_in
+ if pad:
+ fdir = fdir[1:-1, 1:-1]
+ else:
+ self._replace_rim(fdir, left, right, top, bottom)
+ return self._output_handler(data=acc, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+ def _dinf_accumulation(self, fdir=None, weights=None, dirmap=None, nodata_in=None, nodata_out=0,efficiency=None,
+ out_name='acc', inplace=True, pad=False, apply_mask=False,
+ ignore_metadata=False, properties={}, metadata={}, **kwargs):
+ # Filter warnings due to invalid values
+ np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
+ category=RuntimeWarning)
+ # Pad the rim
+ if pad:
+ fdir = np.pad(fdir, (1,1), mode='constant', constant_values=nodata_in)
+ else:
+ left, right, top, bottom = self._pop_rim(fdir, nodata=nodata_in)
+ # Construct flat index onto flow direction array
+ mintype = np.min_scalar_type(fdir.size)
+ domain = np.arange(fdir.size, dtype=mintype)
+ acc_i = np.zeros(fdir.size, dtype=float)
+ try:
+ invalid_cells = ((fdir < 0) | (fdir > (np.pi * 2)))
+ if nodata_in is None:
+ nodata_cells = np.zeros_like(fdir).astype(bool)
+ else:
+ if np.isnan(nodata_in):
+ nodata_cells = (np.isnan(fdir))
+ else:
+ nodata_cells = (fdir == nodata_in)
+ # Split d-infinity grid
+ fdir_0, fdir_1, prop_0, prop_1 = self.angle_to_d8(fdir, dirmap=dirmap)
+ # Ensure consistent types
+ fdir_0 = fdir_0.astype(mintype)
+ fdir_1 = fdir_1.astype(mintype)
+ # Set nodata cells to zero
+ fdir_0[nodata_cells | invalid_cells] = 0
+ fdir_1[nodata_cells | invalid_cells] = 0
+ # Get matching of start and end nodes
+ startnodes, endnodes_0 = self._construct_matching(fdir_0, domain, dirmap=dirmap)
+ _, endnodes_1 = self._construct_matching(fdir_1, domain, dirmap=dirmap)
+ # Remove cycles
+ self._remove_dinf_cycles(fdir_0, fdir_1, startnodes)
+ # Initialize accumulation array
+ if weights is not None:
+ assert(weights.size == fdir.size)
+ acc = weights.flatten().astype(float)
+ else:
+ acc = (~nodata_cells).ravel().astype(float)
+
+ if efficiency is not None:
+ assert(efficiency.size == fdir.size)
+ eff = efficiency.flatten()
+ eff_max, eff_min = np.max(eff), np.min(eff)
+ assert((eff_max<=1) and (eff_min>=0))
+
+ # Ensure no flow directions with zero proportion
+ fdir_0.flat[prop_0 == 0] = fdir_1.flat[prop_0 == 0]
+ fdir_1.flat[prop_1 == 0] = fdir_0.flat[prop_1 == 0]
+ prop_0[prop_0 == 0] = 0.5
+ prop_1[prop_0 == 0] = 0.5
+ prop_0[prop_1 == 0] = 0.5
+ prop_1[prop_1 == 0] = 0.5
+ # Initialize indegree
+ endnodes_0 = fdir_0.flat[startnodes]
+ endnodes_1 = fdir_1.flat[startnodes]
+ indegree_0 = pd.Series(prop_0[startnodes], index=endnodes_0).groupby(level=0).sum()
+ indegree_1 = pd.Series(prop_1[startnodes], index=endnodes_1).groupby(level=0).sum()
+ indegree = np.zeros(startnodes.size, dtype=float)
+ indegree[indegree_0.index.values] += indegree_0.values
+ indegree[indegree_1.index.values] += indegree_1.values
+ del indegree_0
+ del indegree_1
+ # Remove self-cycles
+ startnodes = startnodes[(~((startnodes == endnodes_0) &
+ (startnodes == endnodes_1))) &
+ (indegree == 0)]
+ endnodes_0 = fdir_0.flat[startnodes]
+ endnodes_1 = fdir_1.flat[startnodes]
+ epsilon = 1e-8
+ if efficiency is None:
+ for _ in range(fdir.size):
+ if (startnodes.any()):
+ np.add.at(acc_i, endnodes_0, prop_0[startnodes]*acc[startnodes])
+ np.add.at(acc_i, endnodes_1, prop_1[startnodes]*acc[startnodes])
+ acc += acc_i
+ acc_i.fill(0)
+ np.subtract.at(indegree, endnodes_0, prop_0[startnodes])
+ np.subtract.at(indegree, endnodes_1, prop_1[startnodes])
+ startnodes = np.unique(np.concatenate([endnodes_0, endnodes_1]))
+ startnodes = startnodes[np.abs(indegree[startnodes]) < epsilon]
+ endnodes_0 = fdir_0.flat[startnodes]
+ endnodes_1 = fdir_1.flat[startnodes]
+ # TODO: This part is kind of gross
+ startnodes = startnodes[~((startnodes == endnodes_0) &
+ (startnodes == endnodes_1))]
+ endnodes_0 = fdir_0.flat[startnodes]
+ endnodes_1 = fdir_1.flat[startnodes]
+ else:
+ break
+ else:
+ for _ in range(fdir.size):
+ if (startnodes.any()):
+ np.add.at(acc_i, endnodes_0, prop_0[startnodes]*acc[startnodes] * eff[startnodes])
+ np.add.at(acc_i, endnodes_1, prop_1[startnodes]*acc[startnodes] * eff[startnodes])
+ acc += acc_i
+ acc_i.fill(0)
+ np.subtract.at(indegree, endnodes_0, prop_0[startnodes])
+ np.subtract.at(indegree, endnodes_1, prop_1[startnodes])
+ startnodes = np.unique(np.concatenate([endnodes_0, endnodes_1]))
+ startnodes = startnodes[np.abs(indegree[startnodes]) < epsilon]
+ endnodes_0 = fdir_0.flat[startnodes]
+ endnodes_1 = fdir_1.flat[startnodes]
+ # TODO: This part is kind of gross
+ startnodes = startnodes[~((startnodes == endnodes_0) &
+ (startnodes == endnodes_1))]
+ endnodes_0 = fdir_0.flat[startnodes]
+ endnodes_1 = fdir_1.flat[startnodes]
+ else:
+ break
+ # TODO: Hacky: should probably fix this
+ acc[0] = 1
+ # Reshape and offset accumulation
+ acc = np.reshape(acc, fdir.shape)
+ if pad:
+ acc = acc[1:-1, 1:-1]
+ except:
+ raise
+ finally:
+ # Clean up
+ if nodata_in is not None:
+ fdir[nodata_cells] = nodata_in
+ if pad:
+ fdir = fdir[1:-1, 1:-1]
+ else:
+ self._replace_rim(fdir, left, right, top, bottom)
+ return self._output_handler(data=acc, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+ def _num_cycles(self, fdir, startnodes, max_cycle_len=10):
+ cy = np.zeros(startnodes.size, dtype=np.min_scalar_type(max_cycle_len + 1))
+ endnodes = fdir.flat[startnodes]
+ for n in range(1, max_cycle_len + 1):
+ check = ((startnodes == endnodes) & (cy == 0))
+ cy[check] = n
+ endnodes = fdir.flat[endnodes]
+ return cy
+
+ def _get_cycles(self, fdir, num_cycles, cycle_len=2):
+ s = set(np.where(num_cycles == cycle_len)[0])
+ cycles = []
+ for _ in range(len(s)):
+ if s:
+ cycle = set()
+ i = s.pop()
+ cycle.add(i)
+ n = 1
+ for __ in range(cycle_len):
+ i = fdir.flat[i]
+ cycle.add(i)
+ s.discard(i)
+ if len(cycle) == n:
+ cycles.append(cycle)
+ break
+ else:
+ n += 1
+ return cycles
+
+ def _remove_dinf_cycles(self, fdir_0, fdir_1, startnodes, max_cycles=2):
+ # Find number of cycles at each index
+ cy_0 = self._num_cycles(fdir_0, startnodes, max_cycles)
+ cy_1 = self._num_cycles(fdir_1, startnodes, max_cycles)
+ # Handle double cycles
+ double_cycles = ((cy_1 > 1) & (cy_0 > 1))
+ fdir_0.flat[double_cycles] = np.where(double_cycles)[0]
+ fdir_1.flat[double_cycles] = np.where(double_cycles)[0]
+ cy_0[double_cycles] = 0
+ cy_1[double_cycles] = 0
+ # Remove cycles
+ for cycle_len in reversed(range(2, max_cycles + 1)):
+ cycles_0 = self._get_cycles(fdir_0, cy_0, cycle_len)
+ cycles_1 = self._get_cycles(fdir_1, cy_1, cycle_len)
+ for cycle in cycles_0:
+ node = cycle.pop()
+ fdir_0.flat[node] = fdir_1.flat[node]
+ for cycle in cycles_1:
+ node = cycle.pop()
+ fdir_1.flat[node] = fdir_0.flat[node]
+ # Look for remaining cycles
+ cy_0 = self._num_cycles(fdir_0, startnodes, max_cycles)
+ cy_1 = self._num_cycles(fdir_1, startnodes, max_cycles)
+ fdir_0.flat[(cy_0 > 1)] = np.where(cy_0 > 0)[0]
+ fdir_1.flat[(cy_1 > 1)] = np.where(cy_1 > 0)[0]
+
+ def flow_distance(self, x, y, data, weights=None, dirmap=None, nodata_in=None,
+ nodata_out=0, out_name='dist', routing='d8', method='shortest',
+ inplace=True, xytype='index', apply_mask=True, ignore_metadata=False,
+ snap='corner', **kwargs):
+ """
+ Generates an array representing the topological distance from each cell
+ to the outlet.
+
+ Parameters
+ ----------
+ x : int or float
+ x coordinate of pour point
+ y : int or float
+ y coordinate of pour point
+ data : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ weights: numpy ndarray
+ Weights (distances) to apply to link edges.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ out_name : string
+ Name of attribute containing new flow distance array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ xytype : 'index' or 'label'
+ How to interpret parameters 'x' and 'y'.
+ 'index' : x and y represent the column and row
+ indices of the pour point.
+ 'label' : x and y represent geographic coordinates
+ (will be passed to self.nearest_cell).
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+ snap : str
+ Function to use on array for indexing:
+ 'corner' : numpy.around()
+ 'center' : numpy.floor()
+ """
+ if not _HAS_SCIPY:
+ raise ImportError('flow_distance requires scipy.sparse module')
+ dirmap = self._set_dirmap(dirmap, data)
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ properties = {'nodata' : nodata_out}
+ metadata = {}
+ fdir = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=properties, ignore_metadata=ignore_metadata,
+ **kwargs)
+ xmin, ymin, xmax, ymax = fdir.bbox
+ if xytype in ('label', 'coordinate'):
+ if (x < xmin) or (x > xmax) or (y < ymin) or (y > ymax):
+ raise ValueError('Pour point ({}, {}) is out of bounds for dataset with bbox {}.'
+ .format(x, y, (xmin, ymin, xmax, ymax)))
+ elif xytype == 'index':
+ if (x < 0) or (y < 0) or (x >= fdir.shape[1]) or (y >= fdir.shape[0]):
+ raise ValueError('Pour point ({}, {}) is out of bounds for dataset with shape {}.'
+ .format(x, y, fdir.shape))
+ if routing.lower() == 'd8':
+ return self._d8_flow_distance(x, y, fdir, weights=weights, dirmap=dirmap,
+ nodata_in=nodata_in, nodata_out=nodata_out,
+ out_name=out_name, method=method, inplace=inplace,
+ xytype=xytype, apply_mask=apply_mask,
+ ignore_metadata=ignore_metadata,
+ properties=properties, metadata=metadata,
+ snap=snap, **kwargs)
+ elif routing.lower() == 'dinf':
+ return self._dinf_flow_distance(x, y, fdir, weights=weights, dirmap=dirmap,
+ nodata_in=nodata_in, nodata_out=nodata_out,
+ out_name=out_name, method=method, inplace=inplace,
+ xytype=xytype, apply_mask=apply_mask,
+ ignore_metadata=ignore_metadata,
+ properties=properties, metadata=metadata,
+ snap=snap, **kwargs)
+
+ def _d8_flow_distance(self, x, y, fdir, weights=None, dirmap=None, nodata_in=None,
+ nodata_out=0, out_name='dist', method='shortest', inplace=True,
+ xytype='index', apply_mask=True, ignore_metadata=False, properties={},
+ metadata={}, snap='corner', **kwargs):
+ # Construct flat index onto flow direction array
+ domain = np.arange(fdir.size)
+ fdir_orig_type = fdir.dtype
+ if nodata_in is None:
+ nodata_cells = np.zeros_like(fdir).astype(bool)
+ else:
+ if np.isnan(nodata_in):
+ nodata_cells = (np.isnan(fdir))
+ else:
+ nodata_cells = (fdir == nodata_in)
+ try:
+ mintype = np.min_scalar_type(fdir.size)
+ fdir = fdir.astype(mintype)
+ domain = domain.astype(mintype)
+ startnodes, endnodes = self._construct_matching(fdir, domain,
+ dirmap=dirmap)
+ if xytype == 'label':
+ x, y = self.nearest_cell(x, y, fdir.affine, snap)
+ # TODO: Currently the size of weights is hard to understand
+ if weights is not None:
+ weights = weights.ravel()
+ assert(weights.size == startnodes.size)
+ assert(weights.size == endnodes.size)
+ else:
+ assert(startnodes.size == endnodes.size)
+ weights = (~nodata_cells).ravel().astype(int)
+ C = scipy.sparse.lil_matrix((fdir.size, fdir.size))
+ for i,j,w in zip(startnodes, endnodes, weights):
+ C[i,j] = w
+ C = C.tocsr()
+ xyindex = np.ravel_multi_index((y, x), fdir.shape)
+ dist = csgraph.shortest_path(C, indices=[xyindex], directed=False)
+ dist[~np.isfinite(dist)] = nodata_out
+ dist = dist.ravel()
+ dist = dist.reshape(fdir.shape)
+ except:
+ raise
+ finally:
+ self._unflatten_fdir(fdir, domain, dirmap)
+ fdir = fdir.astype(fdir_orig_type)
+ # Prepare output
+ return self._output_handler(data=dist, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+ def _dinf_flow_distance(self, x, y, fdir, weights=None, dirmap=None, nodata_in=None,
+ nodata_out=0, out_name='dist', method='shortest', inplace=True,
+ xytype='index', apply_mask=True, ignore_metadata=False,
+ properties={}, metadata={}, snap='corner', **kwargs):
+ # Filter warnings due to invalid values
+ np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
+ category=RuntimeWarning)
+ # Construct flat index onto flow direction array
+ mintype = np.min_scalar_type(fdir.size)
+ domain = np.arange(fdir.size, dtype=mintype)
+ fdir_orig_type = fdir.dtype
+ try:
+ invalid_cells = ((fdir < 0) | (fdir > (np.pi * 2)))
+ if nodata_in is None:
+ nodata_cells = np.zeros_like(fdir).astype(bool)
+ else:
+ if np.isnan(nodata_in):
+ nodata_cells = (np.isnan(fdir))
+ else:
+ nodata_cells = (fdir == nodata_in)
+ # Split d-infinity grid
+ fdir_0, fdir_1, prop_0, prop_1 = self.angle_to_d8(fdir, dirmap=dirmap)
+ # Ensure consistent types
+ fdir_0 = fdir_0.astype(mintype)
+ fdir_1 = fdir_1.astype(mintype)
+ # Set nodata cells to zero
+ fdir_0[nodata_cells | invalid_cells] = 0
+ fdir_1[nodata_cells | invalid_cells] = 0
+ # Get matching of start and end nodes
+ startnodes, endnodes_0 = self._construct_matching(fdir_0, domain, dirmap=dirmap)
+ _, endnodes_1 = self._construct_matching(fdir_1, domain, dirmap=dirmap)
+ del fdir_0
+ del fdir_1
+ assert(startnodes.size == endnodes_0.size)
+ assert(startnodes.size == endnodes_1.size)
+ if xytype == 'label':
+ x, y = self.nearest_cell(x, y, fdir.affine, snap)
+ # TODO: Currently the size of weights is hard to understand
+ if weights is not None:
+ if isinstance(weights, list) or isinstance(weights, tuple):
+ assert(isinstance(weights[0], np.ndarray))
+ weights_0 = weights[0].ravel()
+ assert(isinstance(weights[1], np.ndarray))
+ weights_1 = weights[1].ravel()
+ assert(weights_0.size == startnodes.size)
+ assert(weights_1.size == startnodes.size)
+ elif isinstance(weights, np.ndarray):
+ assert(weights.shape[0] == startnodes.size)
+ assert(weights.shape[1] == 2)
+ weights_0 = weights[:,0]
+ weights_1 = weights[:,1]
+ else:
+ weights_0 = (~nodata_cells).ravel().astype(int)
+ weights_1 = weights_0
+ if method.lower() == 'shortest':
+ C = scipy.sparse.lil_matrix((fdir.size, fdir.size))
+ for i, j_0, j_1, w_0, w_1 in zip(startnodes, endnodes_0, endnodes_1,
+ weights_0, weights_1):
+ C[i,j_0] = w_0
+ C[i,j_1] = w_1
+ C = C.tocsr()
+ xyindex = np.ravel_multi_index((y, x), fdir.shape)
+ dist = csgraph.shortest_path(C, indices=[xyindex], directed=False)
+ dist[~np.isfinite(dist)] = nodata_out
+ dist = dist.ravel()
+ dist = dist.reshape(fdir.shape)
+ else:
+ raise NotImplementedError("Only implemented for shortest path distance.")
+ except:
+ raise
+ # Prepare output
+ return self._output_handler(data=dist, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+ def compute_hand(self, fdir, dem, drainage_mask, out_name='hand', dirmap=None,
+ nodata_in_fdir=None, nodata_in_dem=None, nodata_out=np.nan, routing='d8',
+ inplace=True, apply_mask=False, ignore_metadata=False, return_index=False,
+ **kwargs):
+ """
+ Computes the height above nearest drainage (HAND), based on a flow direction grid,
+ a digital elevation grid, and a grid containing the locations of drainage channels.
+
+ Parameters
+ ----------
+ fdir : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ dem : str or Raster
+ Digital elevation data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ drainage_mask : str or Raster
+ Boolean raster or ndarray with nonzero elements indicating
+ locations of drainage channels.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ out_name : string
+ Name of attribute containing new catchment array.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_in_fdir : int or float
+ Value to indicate nodata in flow direction input array.
+ nodata_in_dem : int or float
+ Value to indicate nodata in digital elevation input array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions (not implemented)
+ recursionlimit : int
+ Recursion limit--may need to be raised if
+ recursion limit is reached.
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and crs.
+ """
+ # TODO: Why does this use set_dirmap but flowdir doesn't?
+ dirmap = self._set_dirmap(dirmap, fdir)
+ nodata_in_fdir = self._check_nodata_in(fdir, nodata_in_fdir)
+ nodata_in_dem = self._check_nodata_in(dem, nodata_in_dem)
+ properties = {'nodata' : nodata_out}
+ # TODO: This will overwrite metadata if provided
+ metadata = {'dirmap' : dirmap}
+ # initialize array to collect catchment cells
+ fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=nodata_in_fdir,
+ properties=properties, ignore_metadata=ignore_metadata,
+ **kwargs)
+ dem = self._input_handler(dem, apply_mask=apply_mask, nodata_view=nodata_in_dem,
+ properties=properties, ignore_metadata=ignore_metadata,
+ **kwargs)
+ mask = self._input_handler(drainage_mask, apply_mask=apply_mask, nodata_view=0,
+ properties=properties, ignore_metadata=ignore_metadata,
+ **kwargs)
+ assert (np.asarray(dem.shape) == np.asarray(fdir.shape)).all()
+ assert (np.asarray(dem.shape) == np.asarray(mask.shape)).all()
+ if routing.lower() == 'dinf':
+ try:
+ # Split dinf flowdir
+ fdir_0, fdir_1, prop_0, prop_1 = self.angle_to_d8(fdir, dirmap=dirmap)
+ # Find invalid cells
+ invalid_cells = ((fdir < 0) | (fdir > (np.pi * 2)))
+ # Pad the rim
+ dirleft_0, dirright_0, dirtop_0, dirbottom_0 = self._pop_rim(fdir_0,
+ nodata=nodata_in_fdir)
+ dirleft_1, dirright_1, dirtop_1, dirbottom_1 = self._pop_rim(fdir_1,
+ nodata=nodata_in_fdir)
+ maskleft, maskright, masktop, maskbottom = self._pop_rim(mask, nodata=0)
+ mask = mask.ravel()
+ # Ensure proportion of flow is never zero
+ fdir_0.flat[prop_0 == 0] = fdir_1.flat[prop_0 == 0]
+ fdir_1.flat[prop_1 == 0] = fdir_0.flat[prop_1 == 0]
+ # Set nodata cells to zero
+ fdir_0[invalid_cells] = 0
+ fdir_1[invalid_cells] = 0
+ # Create indexing arrays for convenience
+ visited = np.zeros(fdir.size, dtype=np.bool)
+ # nvisited = np.zeros(fdir.size, dtype=int)
+ r_dirmap = np.array(dirmap)[[4, 5, 6, 7, 0, 1, 2, 3]].tolist()
+ source = np.flatnonzero(mask)
+ hand = -np.ones(fdir.size, dtype=np.int)
+ hand[source] = source
+ visited[source] = True
+ # nvisited[source] += 1
+ for _ in range(fdir.size):
+ selection = self._select_surround_ravel(source, fdir.shape)
+ ix = (((fdir_0.flat[selection] == r_dirmap) |
+ (fdir_1.flat[selection] == r_dirmap)) &
+ (hand.flat[selection] < 0) &
+ (~visited.flat[selection])
+ )
+ # TODO: Not optimized (a lot of copying here)
+ parent = np.tile(source, (len(dirmap), 1)).T[ix]
+ child = selection[ix]
+ if not child.size:
+ break
+ visited.flat[child] = True
+ hand[child] = hand[parent]
+ source = np.unique(child)
+ hand = hand.reshape(dem.shape)
+ if not return_index:
+ hand = np.where(hand != -1, dem - dem.flat[hand], nodata_out)
+ except:
+ raise
+ finally:
+ mask = mask.reshape(dem.shape)
+ self._replace_rim(fdir_0, dirleft_0, dirright_0, dirtop_0, dirbottom_0)
+ self._replace_rim(fdir_1, dirleft_1, dirright_1, dirtop_1, dirbottom_1)
+ self._replace_rim(mask, maskleft, maskright, masktop, maskbottom)
+ return self._output_handler(data=hand, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+ elif routing.lower() == 'd8':
+ try:
+ dirleft, dirright, dirtop, dirbottom = self._pop_rim(fdir, nodata=nodata_in_fdir)
+ maskleft, maskright, masktop, maskbottom = self._pop_rim(mask, nodata=0)
+ mask = mask.ravel()
+ r_dirmap = np.array(dirmap)[[4, 5, 6, 7, 0, 1, 2, 3]].tolist()
+ source = np.flatnonzero(mask)
+ hand = -np.ones(fdir.size, dtype=np.int)
+ hand[source] = source
+ for _ in range(fdir.size):
+ selection = self._select_surround_ravel(source, fdir.shape)
+ ix = (fdir.flat[selection] == r_dirmap) & (hand.flat[selection] < 0)
+ # TODO: Not optimized (a lot of copying here)
+ parent = np.tile(source, (len(dirmap), 1)).T[ix]
+ child = selection[ix]
+ if not child.size:
+ break
+ hand[child] = hand[parent]
+ source = child
+ hand = hand.reshape(dem.shape)
+ if not return_index:
+ hand = np.where(hand != -1, dem - dem.flat[hand], nodata_out)
+ except:
+ raise
+ finally:
+ mask = mask.reshape(dem.shape)
+ self._replace_rim(fdir, dirleft, dirright, dirtop, dirbottom)
+ self._replace_rim(mask, maskleft, maskright, masktop, maskbottom)
+ return self._output_handler(data=hand, out_name=out_name, properties=properties,
+ inplace=inplace, metadata=metadata)
+
+
+ def cell_area(self, out_name='area', nodata_out=0, inplace=True, as_crs=None):
+ """
+ Generates an array representing the area of each cell to the outlet.
+
+ Parameters
+ ----------
+ out_name : string
+ Name of attribute containing new cell area array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ as_crs : pyproj.Proj
+ CRS at which to compute the area of each cell.
+ """
+ if as_crs is None:
+ if getattr(_pyproj_crs(self.crs), _pyproj_crs_is_geographic):
+ warnings.warn(('CRS is geographic. Area will not have meaningful '
+ 'units.'))
+ else:
+ if getattr(_pyproj_crs(as_crs), _pyproj_crs_is_geographic):
+ warnings.warn(('CRS is geographic. Area will not have meaningful '
+ 'units.'))
+ indices = np.vstack(np.dstack(np.meshgrid(*self.grid_indices(),
+ indexing='ij')))
+ # TODO: Add to_crs conversion here
+ if as_crs:
+ indices = self._convert_grid_indices_crs(indices, self.crs, as_crs)
+ dyy, dyx = np.gradient(indices[:, 0].reshape(self.shape))
+ dxy, dxx = np.gradient(indices[:, 1].reshape(self.shape))
+ dy = np.sqrt(dyy**2 + dyx**2)
+ dx = np.sqrt(dxy**2 + dxx**2)
+ area = dx * dy
+ metadata = {}
+ private_props = {'nodata' : nodata_out}
+ grid_props = self._generate_grid_props(**private_props)
+ return self._output_handler(data=area, out_name=out_name, properties=grid_props,
+ inplace=inplace, metadata=metadata)
+
+ def cell_distances(self, data, out_name='cdist', dirmap=None, nodata_in=None, nodata_out=0,
+ routing='d8', inplace=True, as_crs=None, apply_mask=True,
+ ignore_metadata=False):
+ """
+ Generates an array representing the distance from each cell to its downstream neighbor.
+
+ Parameters
+ ----------
+ data : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ out_name : string
+ Name of attribute containing new cell distance array.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ as_crs : pyproj.Proj
+ CRS at which to compute the distance from each cell to its downstream neighbor.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+ """
+ if routing.lower() != 'd8':
+ raise NotImplementedError('Only implemented for D8 routing.')
+ if as_crs is None:
+ if getattr(_pyproj_crs(self.crs), _pyproj_crs_is_geographic):
+ warnings.warn(('CRS is geographic. Area will not have meaningful '
+ 'units.'))
+ else:
+ if getattr(_pyproj_crs(as_crs), _pyproj_crs_is_geographic):
+ warnings.warn(('CRS is geographic. Area will not have meaningful '
+ 'units.'))
+ indices = np.vstack(np.dstack(np.meshgrid(*self.grid_indices(),
+ indexing='ij')))
+ if as_crs:
+ indices = self._convert_grid_indices_crs(indices, self.crs, as_crs)
+ dirmap = self._set_dirmap(dirmap, data)
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ grid_props = {'nodata' : nodata_out}
+ metadata = {}
+ fdir = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=grid_props, ignore_metadata=ignore_metadata)
+ dyy, dyx = np.gradient(indices[:, 0].reshape(self.shape))
+ dxy, dxx = np.gradient(indices[:, 1].reshape(self.shape))
+ dy = np.sqrt(dyy**2 + dyx**2)
+ dx = np.sqrt(dxy**2 + dxx**2)
+ ddiag = np.sqrt(dy**2 + dx**2)
+ cdist = np.zeros(self.shape)
+ for i, direction in enumerate(dirmap):
+ if i in (0, 4):
+ cdist[fdir == direction] = dy[fdir == direction]
+ elif i in (2, 6):
+ cdist[fdir == direction] = dx[fdir == direction]
+ else:
+ cdist[fdir == direction] = ddiag[fdir == direction]
+ # Prepare output
+ return self._output_handler(data=cdist, out_name=out_name, properties=grid_props,
+ inplace=inplace, metadata=metadata)
+
+ def cell_dh(self, fdir, dem, out_name='dh', dirmap=None, nodata_in=None,
+ nodata_out=np.nan, routing='d8', inplace=True, apply_mask=True,
+ ignore_metadata=False):
+ """
+ Generates an array representing the elevation difference from each cell to its
+ downstream neighbor.
+
+ Parameters
+ ----------
+ fdir : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ dem : str or Raster
+ DEM data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ out_name : string
+ Name of attribute containing new cell elevation difference array.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+ """
+ if routing.lower() != 'd8':
+ raise NotImplementedError('Only implemented for D8 routing.')
+ nodata_in = self._check_nodata_in(fdir, nodata_in)
+ fdir_props = {'nodata' : nodata_out}
+ fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=fdir_props, ignore_metadata=ignore_metadata)
+ nodata_in = self._check_nodata_in(dem, nodata_in)
+ dem_props = {'nodata' : nodata_out}
+ metadata = {}
+ dem = self._input_handler(dem, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=dem_props, ignore_metadata=ignore_metadata)
+ try:
+ assert(fdir.affine == dem.affine)
+ assert(fdir.shape == dem.shape)
+ except:
+ raise ValueError('Flow direction and elevation grids not aligned.')
+ dirmap = self._set_dirmap(dirmap, fdir)
+ flat_idx = np.arange(fdir.size)
+ fdir_orig_type = fdir.dtype
+ if nodata_in is None:
+ nodata_cells = np.zeros_like(fdir).astype(bool)
+ else:
+ if np.isnan(nodata_in):
+ nodata_cells = (np.isnan(fdir))
+ else:
+ nodata_cells = (fdir == nodata_in)
+ try:
+ mintype = np.min_scalar_type(fdir.size)
+ fdir = fdir.astype(mintype)
+ flat_idx = flat_idx.astype(mintype)
+ startnodes, endnodes = self._construct_matching(fdir, flat_idx, dirmap)
+ startelev = dem.ravel()[startnodes].astype(np.float64)
+ endelev = dem.ravel()[endnodes].astype(np.float64)
+ dh = (startelev - endelev).reshape(self.shape)
+ dh[nodata_cells] = nodata_out
+ except:
+ raise
+ finally:
+ self._unflatten_fdir(fdir, flat_idx, dirmap)
+ fdir = fdir.astype(fdir_orig_type)
+ # Prepare output
+ private_props = {'nodata' : nodata_out}
+ grid_props = self._generate_grid_props(**private_props)
+ return self._output_handler(data=dh, out_name=out_name, properties=grid_props,
+ inplace=inplace, metadata=metadata)
+
+ def cell_slopes(self, fdir, dem, out_name='slopes', dirmap=None, nodata_in=None,
+ nodata_out=np.nan, routing='d8', as_crs=None, inplace=True, apply_mask=True,
+ ignore_metadata=False):
+ """
+ Generates an array representing the slope from each cell to its downstream neighbor.
+
+ Parameters
+ ----------
+ fdir : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ dem : str or Raster
+ DEM data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ out_name : string
+ Name of attribute containing new cell slope array.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ as_crs : pyproj.Proj
+ CRS at which to compute the distance from each cell to its downstream neighbor.
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+ """
+ # Filter warnings due to invalid values
+ np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
+ category=RuntimeWarning)
+ np.warnings.filterwarnings(action='ignore', message='divide by zero',
+ category=RuntimeWarning)
+ if routing.lower() != 'd8':
+ raise NotImplementedError('Only implemented for D8 routing.')
+ dh = self.cell_dh(fdir, dem, out_name, inplace=False,
+ nodata_out=nodata_out, dirmap=dirmap)
+ cdist = self.cell_distances(fdir, inplace=False, as_crs=as_crs)
+ if apply_mask:
+ slopes = np.where(self.mask, dh/cdist, nodata_out)
+ else:
+ slopes = dh/cdist
+ # Prepare output
+ metadata = {}
+ private_props = {'nodata' : nodata_out}
+ grid_props = self._generate_grid_props(**private_props)
+ return self._output_handler(data=slopes, out_name=out_name, properties=grid_props,
+ inplace=inplace, metadata=metadata)
+
+ def _check_nodata_in(self, data, nodata_in, override=None):
+ if nodata_in is None:
+ if isinstance(data, str):
+ try:
+ nodata_in = getattr(self, data).viewfinder.nodata
+ except:
+ raise NameError("nodata value for '{0}' not found in instance."
+ .format(data))
+ elif isinstance(data, Raster):
+ try:
+ nodata_in = data.nodata
+ except:
+ raise NameError("nodata value for Raster not found.")
+ if override is not None:
+ nodata_in = override
+ return nodata_in
+
+ def _input_handler(self, data, apply_mask=True, nodata_view=None, properties={},
+ ignore_metadata=False, inherit_metadata=True, metadata={}, **kwargs):
+ required_params = ('affine', 'shape', 'nodata', 'crs')
+ defaults = self.defaults
+ # Handle raster data
+ if (isinstance(data, Raster)):
+ for param in required_params:
+ if not param in properties:
+ if param in kwargs:
+ properties[param] = kwargs[param]
+ else:
+ properties[param] = getattr(data, param)
+ if inherit_metadata:
+ metadata.update(data.metadata)
+ viewfinder = RegularViewFinder(**properties)
+ dataset = Raster(data, viewfinder, metadata=metadata)
+ return dataset
+ # Handle raw data
+ if (isinstance(data, np.ndarray)):
+ for param in required_params:
+ if not param in properties:
+ if param in kwargs:
+ properties[param] = kwargs[param]
+ elif ignore_metadata:
+ properties[param] = defaults[param]
+ else:
+ raise KeyError("Missing required parameter: {0}"
+ .format(param))
+ viewfinder = RegularViewFinder(**properties)
+ dataset = Raster(data, viewfinder, metadata=metadata)
+ return dataset
+ # Handle named dataset
+ elif isinstance(data, str):
+ for param in required_params:
+ if not param in properties:
+ if param in kwargs:
+ properties[param] = kwargs[param]
+ elif hasattr(self, param):
+ properties[param] = getattr(self, param)
+ elif ignore_metadata:
+ properties[param] = defaults[param]
+ else:
+ raise KeyError("Missing required parameter: {0}"
+ .format(param))
+ viewfinder = RegularViewFinder(**properties)
+ data = self.view(data, apply_mask=apply_mask, nodata=nodata_view)
+ if inherit_metadata:
+ metadata.update(data.metadata)
+ dataset = Raster(data, viewfinder, metadata=metadata)
+ return dataset
+ else:
+ raise TypeError('Data must be a Raster, numpy ndarray or name string.')
+
+ def _output_handler(self, data, out_name, properties, inplace, metadata={}):
+ # TODO: Should this be rolled into add_data?
+ viewfinder = RegularViewFinder(**properties)
+ dataset = Raster(data, viewfinder, metadata=metadata)
+ if inplace:
+ setattr(self, out_name, dataset)
+ self.grids.append(out_name)
+ else:
+ return dataset
+
+ def _generate_grid_props(self, **kwargs):
+ properties = {}
+ required = ('affine', 'shape', 'nodata', 'crs')
+ properties.update(kwargs)
+ for param in required:
+ properties[param] = properties.setdefault(param,
+ getattr(self, param))
+ return properties
+
+ def _pop_rim(self, data, nodata=0):
+ # TODO: Does this default make sense?
+ if nodata is None:
+ nodata = 0
+ left, right, top, bottom = (data[:,0].copy(), data[:,-1].copy(),
+ data[0,:].copy(), data[-1,:].copy())
+ data[:,0] = nodata
+ data[:,-1] = nodata
+ data[0,:] = nodata
+ data[-1,:] = nodata
+ return left, right, top, bottom
+
+ def _replace_rim(self, data, left, right, top, bottom):
+ data[:,0] = left
+ data[:,-1] = right
+ data[0,:] = top
+ data[-1,:] = bottom
+ return None
+
+ def _dy_dx(self):
+ x0, y0, x1, y1 = self.bbox
+ dy = np.abs(y1 - y0) / (self.shape[0]) #TODO: Should this be shape - 1?
+ dx = np.abs(x1 - x0) / (self.shape[1]) #TODO: Should this be shape - 1?
+ return dy, dx
+
+ # def _convert_bbox_crs(self, bbox, old_crs, new_crs):
+ # # TODO: Won't necessarily work in every case as ur might be lower than
+ # # ul
+ # x1 = np.asarray((bbox[0], bbox[2]))
+ # y1 = np.asarray((bbox[1], bbox[3]))
+ # x2, y2 = pyproj.transform(old_crs, new_crs,
+ # x1, y1)
+ # new_bbox = (x2[0], y2[0], x2[1], y2[1])
+ # return new_bbox
+
+ def _convert_grid_indices_crs(self, grid_indices, old_crs, new_crs):
+ if _OLD_PYPROJ:
+ x2, y2 = pyproj.transform(old_crs, new_crs, grid_indices[:,1],
+ grid_indices[:,0])
+ else:
+ x2, y2 = pyproj.transform(old_crs, new_crs, grid_indices[:,1],
+ grid_indices[:,0], errcheck=True,
+ always_xy=True)
+ yx2 = np.column_stack([y2, x2])
+ return yx2
+
+ # def _convert_outer_indices_crs(self, affine, shape, old_crs, new_crs):
+ # y1, x1 = self.grid_indices(affine=affine, shape=shape)
+ # lx, _ = pyproj.transform(old_crs, new_crs,
+ # x1, np.repeat(y1[0], len(x1)))
+ # rx, _ = pyproj.transform(old_crs, new_crs,
+ # x1, np.repeat(y1[-1], len(x1)))
+ # __, by = pyproj.transform(old_crs, new_crs,
+ # np.repeat(x1[0], len(y1)), y1)
+ # __, uy = pyproj.transform(old_crs, new_crs,
+ # np.repeat(x1[-1], len(y1)), y1)
+ # return by, uy, lx, rx
+
+ def _flatten_fdir(self, fdir, flat_idx, dirmap, copy=False):
+ # WARNING: This modifies fdir in place if copy is set to False!
+ if copy:
+ fdir = fdir.copy()
+ shape = fdir.shape
+ go_to = (
+ 0 - shape[1],
+ 1 - shape[1],
+ 1 + 0,
+ 1 + shape[1],
+ 0 + shape[1],
+ -1 + shape[1],
+ -1 + 0,
+ -1 - shape[1]
+ )
+ gotomap = dict(zip(dirmap, go_to))
+ for k, v in gotomap.items():
+ fdir[fdir == k] = v
+ fdir.flat[flat_idx] += flat_idx
+
+ def _unflatten_fdir(self, fdir, flat_idx, dirmap):
+ shape = fdir.shape
+ go_to = (
+ 0 - shape[1],
+ 1 - shape[1],
+ 1 + 0,
+ 1 + shape[1],
+ 0 + shape[1],
+ -1 + shape[1],
+ -1 + 0,
+ -1 - shape[1]
+ )
+ gotomap = dict(zip(go_to, dirmap))
+ fdir.flat[flat_idx] -= flat_idx
+ for k, v in gotomap.items():
+ fdir[fdir == k] = v
+
+ def _construct_matching(self, fdir, flat_idx, dirmap, fdir_flattened=False):
+ # TODO: Maybe fdir should be flattened outside this function
+ if not fdir_flattened:
+ self._flatten_fdir(fdir, flat_idx, dirmap)
+ startnodes = flat_idx
+ endnodes = fdir.flat[flat_idx]
+ return startnodes, endnodes
+
+ def clip_to(self, data_name, precision=7, inplace=True, apply_mask=True,
+ pad=(0,0,0,0)):
+ """
+ Clip grid to bbox representing the smallest area that contains all
+ non-null data for a given dataset. If inplace is True, will set
+ self.bbox to the bbox generated by this method.
+
+ Parameters
+ ----------
+ data_name : str
+ Name of attribute to base the clip on.
+ precision : int
+ Precision to use when matching geographic coordinates.
+ inplace : bool
+ If True, update current view (self.affine and self.shape) to
+ conform to clip.
+ apply_mask : bool
+ If True, update self.mask based on nonzero values of .
+ pad : tuple of int (length 4)
+ Apply padding to edges of new view (left, bottom, right, top). A pad of
+ (1,1,1,1), for instance, will add a one-cell rim around the new view.
+ """
+ # get class attributes
+ data = getattr(self, data_name)
+ nodata = data.nodata
+ # get bbox of nonzero entries
+ if np.isnan(data.nodata):
+ mask = (~np.isnan(data))
+ nz = np.nonzero(mask)
+ else:
+ mask = (data != nodata)
+ nz = np.nonzero(mask)
+ # TODO: Something is messed up with the padding
+ yi_min = nz[0].min() - pad[1]
+ yi_max = nz[0].max() + pad[3]
+ xi_min = nz[1].min() - pad[0]
+ xi_max = nz[1].max() + pad[2]
+ xul, yul = data.affine * (xi_min, yi_min)
+ xlr, ylr = data.affine * (xi_max + 1, yi_max + 1)
+ # if inplace is True, clip all grids to new bbox and set self.bbox
+ if inplace:
+ new_affine = Affine(data.affine.a, data.affine.b, xul,
+ data.affine.d, data.affine.e, yul)
+ ncols, nrows = ~new_affine * (xlr, ylr)
+ np.testing.assert_almost_equal(nrows, round(nrows), decimal=precision)
+ np.testing.assert_almost_equal(ncols, round(ncols), decimal=precision)
+ ncols, nrows = np.around([ncols, nrows]).astype(int)
+ self.affine = new_affine
+ self.shape = (nrows, ncols)
+ self.crs = data.crs
+ if apply_mask:
+ mask = np.pad(mask, ((pad[1], pad[3]),(pad[0], pad[2])), mode='constant',
+ constant_values=0).astype(bool)
+ self.mask = mask[yi_min + pad[1] : yi_max + pad[3] + 1,
+ xi_min + pad[0] : xi_max + pad[2] + 1]
+ else:
+ self.mask = np.ones((nrows, ncols)).astype(bool)
+ else:
+ # if inplace is False, return the clipped data
+ # TODO: This will fail if there is padding because of negative index
+ return data[yi_min:yi_max+1, xi_min:xi_max+1]
+
+ @property
+ def affine(self):
+ return self.viewfinder.affine
+
+ @property
+ def shape(self):
+ return self.viewfinder.shape
+
+ @property
+ def nodata(self):
+ return self.viewfinder.nodata
+
+ @property
+ def crs(self):
+ return self.viewfinder.crs
+
+ @property
+ def mask(self):
+ return self.viewfinder.mask
+
+ @affine.setter
+ def affine(self, new_affine):
+ self.viewfinder.affine = new_affine
+
+ @shape.setter
+ def shape(self, new_shape):
+ self.viewfinder.shape = new_shape
+
+ @nodata.setter
+ def nodata(self, new_nodata):
+ self.viewfinder.nodata = new_nodata
+
+ @crs.setter
+ def crs(self, new_crs):
+ self.viewfinder.crs = new_crs
+
+ @mask.setter
+ def mask(self, new_mask):
+ self.viewfinder.mask = new_mask
+
+ @property
+ def bbox(self):
+ return self.viewfinder.bbox
+
+ @property
+ def size(self):
+ return self.viewfinder.size
+
+ @property
+ def extent(self):
+ bbox = self.bbox
+ extent = (self.bbox[0], self.bbox[2], self.bbox[1], self.bbox[3])
+ return extent
+
+ @property
+ def cellsize(self):
+ dy, dx = self._dy_dx()
+ # TODO: Assuming square cells
+ cellsize = (dy + dx) / 2
+ return cellsize
+
+ def set_nodata(self, data_name, new_nodata, old_nodata=None):
+ """
+ Change nodata value of a dataset.
+
+ Parameters
+ ----------
+ data_name : string
+ Attribute name of dataset to change.
+ new_nodata : int or float
+ New nodata value to use.
+ old_nodata : int or float (optional)
+ If none provided, defaults to
+ self..
+ """
+ if old_nodata is None:
+ old_nodata = getattr(self, data_name).nodata
+ data = getattr(self, data_name)
+ if np.isnan(old_nodata):
+ np.place(data, np.isnan(data), new_nodata)
+ else:
+ np.place(data, data == old_nodata, new_nodata)
+ data.nodata = new_nodata
+
+ def to_ascii(self, data_name, file_name, view=True, delimiter=' ', fmt=None,
+ apply_mask=False, nodata=None, interpolation='nearest',
+ as_crs=None, kx=3, ky=3, s=0, tolerance=1e-3, dtype=None,
+ **kwargs):
+ """
+ Writes gridded data to ascii grid files.
+
+ Parameters
+ ----------
+ data_name : str
+ Attribute name of dataset to write.
+ file_name : str
+ Name of file to write to.
+ view : bool
+ If True, writes the "view" of the dataset. Otherwise, writes the
+ entire dataset.
+ delimiter : string (optional)
+ Delimiter to use in output file (defaults to ' ')
+ fmt : str
+ Formatting for numeric data. Passed to np.savetxt.
+ apply_mask : bool
+ If True, write the "masked" view of the dataset.
+ nodata : int or float
+ Value indicating no data in output array.
+ Defaults to the `nodata` attribute of the input dataset.
+ interpolation: 'nearest', 'linear', 'cubic', 'spline'
+ Interpolation method to be used. If both the input data
+ view and output data view can be defined on a regular grid,
+ all interpolation methods are available. If one
+ of the datasets cannot be defined on a regular grid, or the
+ datasets use a different CRS, only 'nearest', 'linear' and
+ 'cubic' are available.
+ as_crs: pyproj.Proj
+ Projection at which to view the data (overrides self.crs).
+ kx, ky: int
+ Degrees of the bivariate spline, if 'spline' interpolation is desired.
+ s : float
+ Smoothing factor of the bivariate spline, if 'spline' interpolation is desired.
+ tolerance: float
+ Maximum tolerance when matching coordinates. Data coordinates
+ that cannot be matched to a target coordinate within this
+ tolerance will be masked with the nodata value in the output array.
+ dtype: numpy datatype
+ Desired datatype of the output array.
+ """
+ header_space = 9*' '
+ # TODO: Should probably replace with input handler to remain consistent
+ if view:
+ data = self.view(data_name, apply_mask=apply_mask, nodata=nodata,
+ interpolation=interpolation, as_crs=as_crs, kx=kx, ky=ky, s=s,
+ tolerance=tolerance, dtype=dtype, **kwargs)
+ else:
+ data = getattr(self, data_name)
+ nodata = data.nodata
+ shape = data.shape
+ bbox = data.bbox
+ # TODO: This breaks if cells are not square; issue with ASCII format
+ cellsize = data.cellsize
+ header = (("ncols{0}{1}\nnrows{0}{2}\nxllcorner{0}{3}\n"
+ "yllcorner{0}{4}\ncellsize{0}{5}\nNODATA_value{0}{6}")
+ .format(header_space,
+ shape[1],
+ shape[0],
+ bbox[0],
+ bbox[1],
+ cellsize,
+ nodata))
+ if fmt is None:
+ if np.issubdtype(data.dtype, np.integer):
+ fmt = '%d'
+ else:
+ fmt = '%.18e'
+ np.savetxt(file_name, data, fmt=fmt, delimiter=delimiter, header=header, comments='')
+
+ def to_raster(self, data_name, file_name, profile=None, view=True, blockxsize=256,
+ blockysize=256, apply_mask=False, nodata=None, interpolation='nearest',
+ as_crs=None, kx=3, ky=3, s=0, tolerance=1e-3, dtype=None, **kwargs):
+ """
+ Writes gridded data to a raster.
+
+ Parameters
+ ----------
+ data_name : str
+ Attribute name of dataset to write.
+ file_name : str
+ Name of file to write to.
+ profile : dict
+ Profile of driver for writing data. See rasterio documentation.
+ view : bool
+ If True, writes the "view" of the dataset. Otherwise, writes the
+ entire dataset.
+ blockxsize : int
+ Size of blocks in horizontal direction. See rasterio documentation.
+ blockysize : int
+ Size of blocks in vertical direction. See rasterio documentation.
+ apply_mask : bool
+ If True, write the "masked" view of the dataset.
+ nodata : int or float
+ Value indicating no data in output array.
+ Defaults to the `nodata` attribute of the input dataset.
+ interpolation: 'nearest', 'linear', 'cubic', 'spline'
+ Interpolation method to be used. If both the input data
+ view and output data view can be defined on a regular grid,
+ all interpolation methods are available. If one
+ of the datasets cannot be defined on a regular grid, or the
+ datasets use a different CRS, only 'nearest', 'linear' and
+ 'cubic' are available.
+ as_crs: pyproj.Proj
+ Projection at which to view the data (overrides self.crs).
+ kx, ky: int
+ Degrees of the bivariate spline, if 'spline' interpolation is desired.
+ s : float
+ Smoothing factor of the bivariate spline, if 'spline' interpolation is desired.
+ tolerance: float
+ Maximum tolerance when matching coordinates. Data coordinates
+ that cannot be matched to a target coordinate within this
+ tolerance will be masked with the nodata value in the output array.
+ dtype: numpy datatype
+ Desired datatype of the output array.
+ """
+ # TODO: Should probably replace with input handler to remain consistent
+ if view:
+ data = self.view(data_name, apply_mask=apply_mask, nodata=nodata,
+ interpolation=interpolation, as_crs=as_crs, kx=kx, ky=ky, s=s,
+ tolerance=tolerance, dtype=dtype, **kwargs)
+ else:
+ data = getattr(self, data_name)
+ height, width = data.shape
+ default_blockx = width
+ default_profile = {
+ 'driver' : 'GTiff',
+ 'blockxsize' : blockxsize,
+ 'blockysize' : blockysize,
+ 'count': 1,
+ 'tiled' : True
+ }
+ if not profile:
+ profile = default_profile
+ profile_updates = {
+ 'crs' : data.crs.srs,
+ 'transform' : data.affine,
+ 'dtype' : data.dtype.name,
+ 'nodata' : data.nodata,
+ 'height' : height,
+ 'width' : width
+ }
+ profile.update(profile_updates)
+ with rasterio.open(file_name, 'w', **profile) as dst:
+ dst.write(np.asarray(data), 1)
+
+ def extract_profiles(self, fdir, mask, dirmap=None, nodata_in=None, routing='d8',
+ apply_mask=True, ignore_metadata=False, **kwargs):
+ """
+ Generates river profiles from flow_direction and mask arrays.
+
+ Parameters
+ ----------
+ fdir : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ mask : np.ndarray or Raster
+ Boolean array indicating channelized regions
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+
+ Returns
+ -------
+ profiles : np.ndarray
+ Array of channel profiles
+ connections : dict
+ Dictionary containing connections between channel profiles
+ """
+ if routing.lower() != 'd8':
+ raise NotImplementedError('Only implemented for D8 routing.')
+ # TODO: If two "forks" are directly connected, it can introduce a gap
+ fdir_nodata_in = self._check_nodata_in(fdir, nodata_in)
+ mask_nodata_in = self._check_nodata_in(mask, nodata_in)
+ fdir_props = {}
+ mask_props = {}
+ fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=fdir_nodata_in,
+ properties=fdir_props,
+ ignore_metadata=ignore_metadata, **kwargs)
+ mask = self._input_handler(mask, apply_mask=apply_mask, nodata_view=mask_nodata_in,
+ properties=mask_props,
+ ignore_metadata=ignore_metadata, **kwargs)
+ try:
+ assert(fdir.shape == mask.shape)
+ assert(fdir.affine == mask.affine)
+ except:
+ raise ValueError('Flow direction and accumulation grids not aligned.')
+ dirmap = self._set_dirmap(dirmap, fdir)
+ flat_idx = np.arange(fdir.size)
+ fdir_orig_type = fdir.dtype
+ try:
+ mintype = np.min_scalar_type(fdir.size)
+ fdir = fdir.astype(mintype)
+ flat_idx = flat_idx.astype(mintype)
+ startnodes, endnodes = self._construct_matching(fdir, flat_idx,
+ dirmap=dirmap)
+ start = startnodes[mask.flat[startnodes]]
+ end = fdir.flat[start]
+ # Find nodes with indegree > 1
+ indegree = (np.bincount(end)).astype(np.uint8)
+ forks_end = np.flatnonzero(indegree > 1)
+ # Find fork nodes
+ is_fork = np.in1d(end, forks_end)
+ forks = pd.Series(end[is_fork], index=start[is_fork])
+ # Cut endnode at forks
+ endnodes[start[is_fork]] = 0
+ endnodes[0] = 0
+ # Make sure while loop terminates
+ endnodes[endnodes == startnodes] = 0
+ end = endnodes[start]
+ no_pred = ~np.in1d(start, end)
+ start = start[no_pred]
+ end = endnodes[start]
+ ixes = []
+ ixes.append(start)
+ ixes.append(end)
+ while end.any():
+ end = endnodes[end]
+ ixes.append(end)
+ ixes = np.column_stack(ixes)
+ forkorder = pd.Series(np.arange(len(ixes)), index=ixes[:, 0])
+ profiles = []
+ connections = {}
+ for row in ixes:
+ profile = row[row != 0]
+ profile_start, profile_end = profile[0], profile[-1]
+ start_num = forkorder.at[profile_start]
+ if profile_end in forks.index:
+ profile_end = forks.at[profile_end]
+ if profile_end in forkorder.index:
+ end_num = forkorder.at[profile_end]
+ else:
+ end_num = -1
+ profiles.append(profile)
+ connections.update({start_num : end_num})
+ except:
+ raise
+ finally:
+ self._unflatten_fdir(fdir, flat_idx, dirmap)
+ fdir = fdir.astype(fdir_orig_type)
+ return profiles, connections
+
+ def extract_river_network(self, fdir, mask, dirmap=None, nodata_in=None, routing='d8',
+ apply_mask=True, ignore_metadata=False, **kwargs):
+ """
+ Generates river segments from accumulation and flow_direction arrays.
+
+ Parameters
+ ----------
+ fdir : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ mask : np.ndarray or Raster
+ Boolean array indicating channelized regions
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+
+ Returns
+ -------
+ geo : geojson.FeatureCollection
+ A geojson feature collection of river segments. Each array contains the cell
+ indices of junctions in the segment.
+ """
+ profiles, connections = self.extract_profiles(fdir, mask, dirmap=dirmap,
+ nodata_in=nodata_in,
+ routing=routing,
+ apply_mask=apply_mask,
+ ignore_metadata=ignore_metadata,
+ **kwargs)
+ fdir_nodata_in = self._check_nodata_in(fdir, nodata_in)
+ fdir_props = {}
+ fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=fdir_nodata_in,
+ properties=fdir_props,
+ ignore_metadata=ignore_metadata, **kwargs)
+ featurelist = []
+ for index, profile in enumerate(profiles):
+ endpoint = profiles[connections[index]][0]
+ yi, xi = np.unravel_index(profile.tolist() + [endpoint], fdir.shape)
+ x, y = fdir.affine * (xi, yi)
+ line = geojson.LineString(np.column_stack([x, y]).tolist())
+ featurelist.append(geojson.Feature(geometry=line, id=index))
+ geo = geojson.FeatureCollection(featurelist)
+ return geo
+
+ def detect_pits(self, data, nodata_in=None, apply_mask=False, ignore_metadata=True,
+ **kwargs):
+ """
+ Detect pits in a DEM.
+
+ Parameters
+ ----------
+ data : str or Raster
+ DEM data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+
+ Returns
+ -------
+ pits : numpy ndarray
+ Boolean array indicating locations of pits.
+ """
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ grid_props = {}
+ dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=grid_props, ignore_metadata=ignore_metadata,
+ **kwargs)
+ if nodata_in is None:
+ dem_mask = np.array([]).astype(int)
+ else:
+ if np.isnan(nodata_in):
+ dem_mask = np.where(np.isnan(dem.ravel()))[0]
+ else:
+ dem_mask = np.where(dem.ravel() == nodata_in)[0]
+ # Make sure nothing flows to the nodata cells
+ dem.flat[dem_mask] = dem.max() + 1
+ inside = self._inside_indices(dem, mask=dem_mask)
+ inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
+ pits_bool = (diff < 0).all(axis=0)
+ pits = np.zeros(dem.shape, dtype=np.bool)
+ pits.flat[inside] = pits_bool
+ return pits
+
+ def detect_flats(self, data, nodata_in=None, apply_mask=False, ignore_metadata=True, **kwargs):
+ """
+ Detect flats in a DEM.
+
+ Parameters
+ ----------
+ data : str or Raster
+ DEM data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+
+ Returns
+ -------
+ flats : numpy ndarray
+ Boolean array indicating locations of flats.
+ """
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ grid_props = {}
+ dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=grid_props, ignore_metadata=ignore_metadata,
+ **kwargs)
+ if nodata_in is None:
+ dem_mask = np.array([]).astype(int)
+ else:
+ if np.isnan(nodata_in):
+ dem_mask = np.where(np.isnan(dem.ravel()))[0]
+ else:
+ dem_mask = np.where(dem.ravel() == nodata_in)[0]
+ # Make sure nothing flows to the nodata cells
+ dem.flat[dem_mask] = dem.max() + 1
+ inside = self._inside_indices(dem, mask=dem_mask)
+ inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
+ pits_bool = (diff < 0).all(axis=0)
+ flats_bool = (~fdir_defined & ~pits_bool)
+ flats = np.zeros(dem.shape, dtype=np.bool)
+ flats.flat[inside] = flats_bool
+ return flats
+
+ def detect_cycles(self, fdir, max_cycle_len=50, dirmap=None, nodata_in=0, nodata_out=-1,
+ apply_mask=True, ignore_metadata=False, **kwargs):
+ """
+ Checks for cycles in flow direction array.
+
+ Parameters
+ ----------
+ fdir : str or Raster
+ Flow direction data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ max_cycle_size: int
+ Max depth of cycle to search for.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value indicating no data in output array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+
+ Returns
+ -------
+ num_cycles : numpy ndarray
+ Array indicating max cycle length at each cell.
+ """
+ dirmap = self._set_dirmap(dirmap, fdir)
+ nodata_in = self._check_nodata_in(fdir, nodata_in)
+ grid_props = {'nodata' : nodata_out}
+ metadata = {}
+ fdir = self._input_handler(fdir, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=grid_props,
+ ignore_metadata=ignore_metadata, **kwargs)
+ if np.isnan(nodata_in):
+ in_catch = ~np.isnan(fdir.ravel())
+ else:
+ in_catch = (fdir.ravel() != nodata_in)
+ ix = np.where(in_catch)[0]
+ flat_idx = np.arange(fdir.size)
+ fdir_orig_type = fdir.dtype
+ ncycles = np.zeros(fdir.shape, dtype=np.min_scalar_type(max_cycle_len + 1))
+ try:
+ mintype = np.min_scalar_type(fdir.size)
+ fdir = fdir.astype(mintype)
+ flat_idx = flat_idx.astype(mintype)
+ startnodes, endnodes = self._construct_matching(fdir, flat_idx, dirmap)
+ startnodes = startnodes[ix]
+ ncycles.flat[startnodes] = self._num_cycles(fdir, startnodes, max_cycle_len=max_cycle_len)
+ except:
+ raise
+ finally:
+ self._unflatten_fdir(fdir, flat_idx, dirmap)
+ fdir = fdir.astype(fdir_orig_type)
+ return ncycles
+
+ def fill_pits(self, data, out_name='filled_dem', nodata_in=None, nodata_out=0,
+ inplace=True, apply_mask=False, ignore_metadata=False, **kwargs):
+ """
+ Fill pits in a DEM. Raises pits to same elevation as lowest neighbor.
+
+ Parameters
+ ----------
+ data : str or Raster
+ DEM data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ out_name : string
+ Name of attribute containing new filled pit array.
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value indicating no data in output array.
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+ """
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ grid_props = {'nodata' : nodata_out}
+ metadata = {}
+ dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=grid_props, ignore_metadata=ignore_metadata,
+ **kwargs)
+ if nodata_in is None:
+ dem_mask = np.array([]).astype(int)
+ else:
+ if np.isnan(nodata_in):
+ dem_mask = np.where(np.isnan(dem.ravel()))[0]
+ else:
+ dem_mask = np.where(dem.ravel() == nodata_in)[0]
+ # Make sure nothing flows to the nodata cells
+ dem.flat[dem_mask] = dem.max() + 1
+ inside = self._inside_indices(dem, mask=dem_mask)
+ inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
+ pits_bool = (diff < 0).all(axis=0)
+ pits = np.zeros(dem.shape, dtype=np.bool)
+ pits.flat[inside] = pits_bool
+ dem_out = dem.copy()
+ dem_out.flat[inside[pits_bool]] = (dem.flat[inner_neighbors[:, pits_bool]
+ [np.argmin(np.abs(diff[:, pits_bool]), axis=0),
+ np.arange(np.count_nonzero(pits_bool))]])
+ return self._output_handler(data=dem_out, out_name=out_name, properties=grid_props,
+ inplace=inplace, metadata=metadata)
+
+ def _select_surround(self, i, j):
+ """
+ Select the eight indices surrounding a given index.
+ """
+ return ([i - 1, i - 1, i + 0, i + 1, i + 1, i + 1, i + 0, i - 1],
+ [j + 0, j + 1, j + 1, j + 1, j + 0, j - 1, j - 1, j - 1])
+
+ # def _select_edge_sur(self, edges, k):
+ # """
+ # Select the five cell indices surrounding each edge cell.
+ # """
+ # i, j = edges[k]['k']
+ # if k == 'n':
+ # return ([i + 0, i + 1, i + 1, i + 1, i + 0],
+ # [j + 1, j + 1, j + 0, j - 1, j - 1])
+ # elif k == 'e':
+ # return ([i - 1, i + 1, i + 1, i + 0, i - 1],
+ # [j + 0, j + 0, j - 1, j - 1, j - 1])
+ # elif k == 's':
+ # return ([i - 1, i - 1, i + 0, i + 0, i - 1],
+ # [j + 0, j + 1, j + 1, j - 1, j - 1])
+ # elif k == 'w':
+ # return ([i - 1, i - 1, i + 0, i + 1, i + 1],
+ # [j + 0, j + 1, j + 1, j + 1, j + 0])
+
+ def _select_surround_ravel(self, i, shape):
+ """
+ Select the eight indices surrounding a flattened index.
+ """
+ offset = shape[1]
+ return np.array([i + 0 - offset,
+ i + 1 - offset,
+ i + 1 + 0,
+ i + 1 + offset,
+ i + 0 + offset,
+ i - 1 + offset,
+ i - 1 + 0,
+ i - 1 - offset]).T
+
+ def _inside_indices(self, data, mask=None):
+ if mask is None:
+ mask = np.array([]).astype(int)
+ a = np.arange(data.size)
+ top = np.arange(data.shape[1])[1:-1]
+ left = np.arange(0, data.size, data.shape[1])
+ right = np.arange(data.shape[1] - 1, data.size + 1, data.shape[1])
+ bottom = np.arange(data.size - data.shape[1], data.size)[1:-1]
+ exclude = np.unique(np.concatenate([top, left, right, bottom, mask]))
+ inside = np.delete(a, exclude)
+ return inside
+
+ def _set_dirmap(self, dirmap, data, default_dirmap=(64, 128, 1, 2, 4, 8, 16, 32)):
+ # TODO: Is setting a default dirmap even a good idea?
+ if dirmap is None:
+ if isinstance(data, str):
+ if data in self.grids:
+ try:
+ dirmap = getattr(self, data).metadata['dirmap']
+ except:
+ dirmap = default_dirmap
+ else:
+ raise KeyError("{0} not found in grid instance"
+ .format(data))
+ elif isinstance(data, Raster):
+ try:
+ dirmap = data.metadata['dirmap']
+ except:
+ dirmap = default_dirmap
+ else:
+ dirmap = default_dirmap
+ if len(dirmap) != 8:
+ raise AssertionError('dirmap must be a sequence of length 8')
+ try:
+ assert(not 0 in dirmap)
+ except:
+ raise ValueError("Directional mapping cannot contain '0' (reserved value)")
+ return dirmap
+
+ def _grad_from_higher(self, high_edge_cells, inner_neighbors, diff,
+ fdir_defined, in_bounds, labels, numlabels, crosswalk, inside):
+ z = np.zeros_like(labels)
+ max_iter = np.bincount(labels.ravel())[1:].max()
+ u = high_edge_cells.copy()
+ z.flat[inside[u]] = 1
+ for i in range(2, max_iter):
+ # Select neighbors of high edge cells
+ hec_neighbors = inner_neighbors[:, u]
+ # Get neighbors with same elevation that are in bounds
+ u = np.unique(np.where((diff[:, u] == 0) & (in_bounds.flat[hec_neighbors] == 1),
+ hec_neighbors, 0))
+ # Filter out entries that have already been incremented
+ not_got = (z.flat[u] == 0)
+ u = u[not_got]
+ # Get indices of inner cells from raw index
+ u = crosswalk.flat[u]
+ # Filter out neighbors that are in low edge_cells
+ u = u[(~fdir_defined[u])]
+ # Increment neighboring cells
+ z.flat[inside[u]] = i
+ if u.size <= 1:
+ break
+ z.flat[inside[0]] = 0
+ # Flip increments
+ d = {}
+ for i in range(1, z.max()):
+ label = labels[z == i]
+ label = label[label != 0]
+ label = np.unique(label)
+ d.update({i : label})
+ max_incs = np.zeros(numlabels + 1)
+ for i in range(1, z.max()):
+ max_incs[d[i]] = i
+ max_incs = max_incs[labels.ravel()].reshape(labels.shape)
+ grad_from_higher = max_incs - z
+ return grad_from_higher
+
+ def _grad_towards_lower(self, low_edge_cells, inner_neighbors, diff,
+ fdir_defined, in_bounds, labels, numlabels, crosswalk, inside):
+ x = np.zeros_like(labels)
+ u = low_edge_cells.copy()
+ x.flat[inside[u]] = 1
+ max_iter = np.bincount(labels.ravel())[1:].max()
+
+ for i in range(2, max_iter):
+ # Select neighbors of high edge cells
+ lec_neighbors = inner_neighbors[:, u]
+ # Get neighbors with same elevation that are in bounds
+ u = np.unique(
+ np.where((diff[:, u] == 0) & (in_bounds.flat[lec_neighbors] == 1),
+ lec_neighbors, 0))
+ # Filter out entries that have already been incremented
+ not_got = (x.flat[u] == 0)
+ u = u[not_got]
+ # Get indices of inner cells from raw index
+ u = crosswalk.flat[u]
+ u = u[~fdir_defined.flat[u]]
+ # Increment neighboring cells
+ x.flat[inside[u]] = i
+ if u.size == 0:
+ break
+ x.flat[inside[0]] = 0
+ grad_towards_lower = x
+ return grad_towards_lower
+
+ def _get_high_edge_cells(self, diff, fdir_defined):
+ # High edge cells are defined as:
+ # (a) Flow direction is not defined
+ # (b) Has at least one neighboring cell at a higher elevation
+ higher_cell = (diff < 0).any(axis=0)
+ high_edge_cells_bool = (~fdir_defined & higher_cell)
+ high_edge_cells = np.where(high_edge_cells_bool)[0]
+ return high_edge_cells
+
+ def _get_low_edge_cells(self, diff, fdir_defined, inner_neighbors, shape, inside):
+ # TODO: There is probably a more efficient way to do this
+ # TODO: Select neighbors of flats and then see which have direction defined
+ # Low edge cells are defined as:
+ # (a) Flow direction is defined
+ # (b) Has at least one neighboring cell, n, at the same elevation
+ # (c) The flow direction for this cell n is undefined
+ # Need to check if neighboring cell has fdir undefined
+ same_elev_cell = (diff == 0).any(axis=0)
+ low_edge_cell_candidates = (fdir_defined & same_elev_cell)
+ fdir_def_all = -1 * np.ones(shape)
+ fdir_def_all.flat[inside] = fdir_defined.ravel()
+ fdir_def_neighbors = fdir_def_all.flat[inner_neighbors[:, low_edge_cell_candidates]]
+ same_elev_neighbors = ((diff[:, low_edge_cell_candidates]) == 0)
+ low_edge_cell_passed = (fdir_def_neighbors == 0) & (same_elev_neighbors == 1)
+ low_edge_cells = (np.where(low_edge_cell_candidates)[0]
+ [low_edge_cell_passed.any(axis=0)])
+ return low_edge_cells
+
+ def _drainage_gradient(self, dem, inside):
+ if not _HAS_SKIMAGE:
+ raise ImportError('resolve_flats requires skimage.measure module')
+ inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
+ pits_bool = (diff < 0).all(axis=0)
+ flats_bool = (~fdir_defined & ~pits_bool)
+ flats = np.zeros(dem.shape, dtype=np.bool)
+ flats.flat[inside] = flats_bool
+ high_edge_cells = self._get_high_edge_cells(diff, fdir_defined)
+ low_edge_cells = self._get_low_edge_cells(diff, fdir_defined, inner_neighbors,
+ shape=dem.shape, inside=inside)
+ # Get flats to label
+ labels, numlabels = skimage.measure.label(flats, return_num=True)
+ # Make sure cells stay in bounds
+ in_bounds = np.zeros_like(labels)
+ in_bounds.flat[inside] = 1
+ crosswalk = np.zeros_like(labels)
+ crosswalk.flat[inside] = np.arange(inside.size)
+ grad_from_higher = self._grad_from_higher(high_edge_cells, inner_neighbors, diff,
+ fdir_defined, in_bounds, labels, numlabels,
+ crosswalk, inside)
+ grad_towards_lower = self._grad_towards_lower(low_edge_cells, inner_neighbors, diff,
+ fdir_defined, in_bounds, labels, numlabels,
+ crosswalk, inside)
+ drainage_grad = (2*grad_towards_lower + grad_from_higher).astype(int)
+ return drainage_grad, flats, high_edge_cells, low_edge_cells, labels, diff
+
+ def _d8_diff(self, dem, inside):
+ np.warnings.filterwarnings(action='ignore', message='Invalid value encountered',
+ category=RuntimeWarning)
+ inner_neighbors = self._select_surround_ravel(inside, dem.shape).T
+ inner_neighbors_elev = dem.flat[inner_neighbors]
+ diff = np.subtract(dem.flat[inside], inner_neighbors_elev)
+ fdir_defined = (diff > 0).any(axis=0)
+ return inner_neighbors, diff, fdir_defined
+
+ def resolve_flats(self, data=None, out_name='inflated_dem', nodata_in=None, nodata_out=None,
+ inplace=True, apply_mask=False, ignore_metadata=False, **kwargs):
+ """
+ Resolve flats in a DEM using the modified method of Garbrecht and Martz (1997).
+ See: https://arxiv.org/abs/1511.04433
+
+ Parameters
+ ----------
+ data : str or Raster
+ DEM data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ out_name : string
+ Name of attribute containing new flow direction array.
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+ """
+ # handle nodata values in dem
+ np.warnings.filterwarnings(action='ignore', message='All-NaN axis encountered',
+ category=RuntimeWarning)
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ if nodata_out is None:
+ nodata_out = nodata_in
+ grid_props = {'nodata' : nodata_out}
+ metadata = {}
+ dem = self._input_handler(data, apply_mask=apply_mask, properties=grid_props,
+ ignore_metadata=ignore_metadata, metadata=metadata, **kwargs)
+ if nodata_in is None:
+ dem_mask = np.array([]).astype(int)
+ else:
+ if np.isnan(nodata_in):
+ dem_mask = np.where(np.isnan(dem.ravel()))[0]
+ else:
+ dem_mask = np.where(dem.ravel() == nodata_in)[0]
+ inside = self._inside_indices(dem, mask=dem_mask)
+ drainage_result = self._drainage_gradient(dem, inside)
+ drainage_grad, flats, high_edge_cells, low_edge_cells, labels, diff = drainage_result
+ drainage_grad = drainage_grad.astype(np.float)
+ flatlabels = labels.flat[inside][flats.flat[inside]]
+ flat_diffs = diff[:, flats.flat[inside].ravel()].astype(float)
+ flat_diffs[flat_diffs == 0] = np.nan
+ # TODO: Warning triggered here: all-nan axis encountered
+ minsteps = np.nanmin(np.abs(flat_diffs), axis=0)
+ minsteps = pd.Series(minsteps, index=flatlabels).fillna(0)
+ minsteps = minsteps[minsteps != 0].groupby(level=0).min()
+ gradmax = pd.Series(drainage_grad.flat[inside][flats.flat[inside]],
+ index=flatlabels).groupby(level=0).max().astype(int)
+ gradfactor = (0.9 * (minsteps / gradmax)).replace(np.inf, 0).append(pd.Series({0 : 0}))
+ drainage_grad.flat[inside[flats.flat[inside]]] *= gradfactor[flatlabels].values
+ drainage_grad.flat[inside[low_edge_cells]] = 0
+ dem_out = dem.astype(np.float) + drainage_grad
+ return self._output_handler(data=dem_out, out_name=out_name, properties=grid_props,
+ inplace=inplace, metadata=metadata)
+
+ def fill_depressions(self, data, out_name='flooded_dem', nodata_in=None, nodata_out=None,
+ inplace=True, apply_mask=False, ignore_metadata=False, **kwargs):
+ """
+ Fill depressions in a DEM. Raises depressions to same elevation as lowest neighbor.
+
+ Parameters
+ ----------
+ data : str or Raster
+ DEM data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ out_name : string
+ Name of attribute containing new filled depressions array.
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value indicating no data in output array.
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+ """
+ if not _HAS_SKIMAGE:
+ raise ImportError('resolve_flats requires skimage.morphology module')
+ nodata_in = self._check_nodata_in(data, nodata_in)
+ if nodata_out is None:
+ nodata_out = nodata_in
+ grid_props = {'nodata' : nodata_out}
+ metadata = {}
+ dem = self._input_handler(data, apply_mask=apply_mask, nodata_view=nodata_in,
+ properties=grid_props, ignore_metadata=ignore_metadata,
+ **kwargs)
+ if nodata_in is None:
+ dem_mask = np.ones(dem.shape, dtype=np.bool)
+ else:
+ if np.isnan(nodata_in):
+ dem_mask = np.isnan(dem)
+ else:
+ dem_mask = (dem == nodata_in)
+ dem_mask[0, :] = True
+ dem_mask[-1, :] = True
+ dem_mask[:, 0] = True
+ dem_mask[:, -1] = True
+ # Make sure nothing flows to the nodata cells
+ nanmax = dem[~np.isnan(dem)].max()
+ seed = np.copy(dem)
+ seed[~dem_mask] = nanmax
+ dem_out = skimage.morphology.reconstruction(seed, dem, method='erosion')
+ return self._output_handler(data=dem_out, out_name=out_name, properties=grid_props,
+ inplace=inplace, metadata=metadata)
+
+ # def raise_nondraining_flats(self, data, out_name='raised_dem', nodata_in=None,
+ # nodata_out=np.nan, inplace=True, apply_mask=False,
+ # ignore_metadata=False, **kwargs):
+ # """
+ # Raises nondraining flats (those with no low edge cells) to the elevation of the
+ # lowest surrounding neighbor cell.
+
+ # Parameters
+ # ----------
+ # data : str or Raster
+ # DEM data.
+ # If str: name of the dataset to be viewed.
+ # If Raster: a Raster instance (see pysheds.view.Raster)
+ # out_name : string
+ # Name of attribute containing new flat-resolved array.
+ # nodata_in : int or float
+ # Value to indicate nodata in input array.
+ # nodata_out : int or float
+ # Value indicating no data in output array.
+ # inplace : bool
+ # If True, write output array to self..
+ # Otherwise, return the output array.
+ # apply_mask : bool
+ # If True, "mask" the output using self.mask.
+ # ignore_metadata : bool
+ # If False, require a valid affine transform and CRS.
+ # """
+ # if not _HAS_SKIMAGE:
+ # raise ImportError('resolve_flats requires skimage.measure module')
+ # # TODO: Most of this is copied from resolve flats
+ # if nodata_in is None:
+ # if isinstance(data, str):
+ # try:
+ # nodata_in = getattr(self, data).nodata
+ # except:
+ # raise NameError("nodata value for '{0}' not found in instance."
+ # .format(data))
+ # else:
+ # raise KeyError("No 'nodata' value specified.")
+ # grid_props = {'nodata' : nodata_out}
+ # metadata = {}
+ # dem = self._input_handler(data, apply_mask=apply_mask, properties=grid_props,
+ # ignore_metadata=ignore_metadata, metadata=metadata, **kwargs)
+ # no_lec, labels, numlabels, neighbor_elevs, flatlabels = (
+ # self._get_nondraining_flats(dem, nodata_in=nodata_in, nodata_out=nodata_out,
+ # inplace=inplace, apply_mask=apply_mask,
+ # ignore_metadata=ignore_metadata, **kwargs))
+ # neighbor_elevmin = np.nanmin(neighbor_elevs, axis=0)
+ # raise_elev = pd.Series(neighbor_elevmin, index=flatlabels).groupby(level=0).min()
+ # elev_map = np.zeros(numlabels + 1, dtype=dem.dtype)
+ # elev_map[no_lec] = raise_elev[no_lec].values
+ # elev_replace = elev_map[labels]
+ # raised_dem = np.where(elev_replace, elev_replace, dem).astype(dem.dtype)
+ # return self._output_handler(data=raised_dem, out_name=out_name, properties=grid_props,
+ # inplace=inplace, metadata=metadata)
+
+ def detect_depressions(self, data, nodata_in=None, nodata_out=np.nan,
+ inplace=True, apply_mask=False, ignore_metadata=False,
+ **kwargs):
+ """
+ Detects nondraining flats (those with no low edge cells).
+
+ Parameters
+ ----------
+ data : str or Raster
+ DEM data.
+ If str: name of the dataset to be viewed.
+ If Raster: a Raster instance (see pysheds.view.Raster)
+ nodata_in : int or float
+ Value to indicate nodata in input array.
+ nodata_out : int or float
+ Value indicating no data in output array.
+ inplace : bool
+ If True, write output array to self..
+ Otherwise, return the output array.
+ apply_mask : bool
+ If True, "mask" the output using self.mask.
+ ignore_metadata : bool
+ If False, require a valid affine transform and CRS.
+
+ Returns
+ -------
+ nondraining_flats : numpy ndarray
+ Boolean array indicating locations of nondraining flats.
+ """
+ if not _HAS_SKIMAGE:
+ raise ImportError('resolve_flats requires skimage.measure module')
+ # TODO: Most of this is copied from resolve flats
+ if nodata_in is None:
+ if isinstance(data, str):
+ try:
+ nodata_in = getattr(self, data).nodata
+ except:
+ raise NameError("nodata value for '{0}' not found in instance."
+ .format(data))
+ else:
+ raise KeyError("No 'nodata' value specified.")
+ grid_props = {'nodata' : nodata_out}
+ metadata = {}
+ dem = self._input_handler(data, apply_mask=apply_mask, properties=grid_props,
+ ignore_metadata=ignore_metadata, metadata=metadata, **kwargs)
+ no_lec, labels, numlabels, neighbor_elevs, flatlabels = (
+ self._get_nondraining_flats(dem, nodata_in=nodata_in, nodata_out=nodata_out,
+ inplace=inplace, apply_mask=apply_mask,
+ ignore_metadata=ignore_metadata, **kwargs))
+ bool_map = np.zeros(numlabels + 1, dtype=np.bool)
+ bool_map[no_lec] = 1
+ nondraining_flats = bool_map[labels]
+ return nondraining_flats
+
+ def _get_nondraining_flats(self, dem, nodata_in=None, nodata_out=np.nan,
+ inplace=True, apply_mask=False, ignore_metadata=False, **kwargs):
+ if nodata_in is None:
+ dem_mask = np.array([]).astype(int)
+ else:
+ if np.isnan(nodata_in):
+ dem_mask = np.where(np.isnan(dem.ravel()))[0]
+ else:
+ dem_mask = np.where(dem.ravel() == nodata_in)[0]
+ inside = self._inside_indices(dem, mask=dem_mask)
+ inner_neighbors, diff, fdir_defined = self._d8_diff(dem, inside)
+ pits_bool = (diff < 0).all(axis=0)
+ flats_bool = (~fdir_defined & ~pits_bool)
+ flats = np.zeros(dem.shape, dtype=np.bool)
+ flats.flat[inside] = flats_bool
+ low_edge_cells = self._get_low_edge_cells(diff, fdir_defined, inner_neighbors,
+ shape=dem.shape, inside=inside)
+ # Get flats to label
+ labels, numlabels = skimage.measure.label(flats, return_num=True)
+ flatlabels = labels.flat[inside][flats.flat[inside]]
+ flat_neighbors = inner_neighbors[:, flats.flat[inside].ravel()]
+ flat_elevs = dem.flat[inside][flats.flat[inside]]
+ # TODO: DEPRECATED
+ # neighbor_elevs = dem.flat[flat_neighbors]
+ # neighbor_elevs[neighbor_elevs == flat_elevs] = np.nan
+ neighbor_elevs = None
+ flat_elevs = pd.Series(flat_elevs, index=flatlabels).groupby(level=0).mean()
+ lec_elev = np.zeros(dem.shape, dtype=dem.dtype)
+ lec_elev.flat[inside[low_edge_cells]] = dem.flat[inside].flat[low_edge_cells]
+ has_lec = (lec_elev.flat[flat_neighbors] == flat_elevs[flatlabels].values).any(axis=0)
+ has_lec = pd.Series(has_lec, index=flatlabels).groupby(level=0).any()
+ no_lec = has_lec[~has_lec].index.values
+ return no_lec, labels, numlabels, neighbor_elevs, flatlabels
+
+ def polygonize(self, data=None, mask=None, connectivity=4, transform=None):
+ """
+ Yield (polygon, value) for each set of adjacent pixels of the same value.
+ Wrapper around rasterio.features.shapes
+
+ From rasterio documentation:
+
+ Parameters
+ ----------
+ data : numpy ndarray
+ mask : numpy ndarray
+ Values of False or 0 will be excluded from feature generation.
+ connectivity : 4 or 8 (int)
+ Use 4 or 8 pixel connectivity.
+ transform : affine.Affine
+ Transformation from pixel coordinates of `image` to the
+ coordinate system of the input `shapes`.
+ """
+ if not _HAS_RASTERIO:
+ raise ImportError('Requires rasterio module')
+ if data is None:
+ data = self.mask.astype(np.uint8)
+ if mask is None:
+ mask = self.mask
+ if transform is None:
+ transform = self.affine
+ shapes = rasterio.features.shapes(data, mask=mask, connectivity=connectivity,
+ transform=transform)
+ return shapes
+
+ def rasterize(self, shapes, out_shape=None, fill=0, out=None, transform=None,
+ all_touched=False, default_value=1, dtype=None):
+ """
+ Return an image array with input geometries burned in.
+ Wrapper around rasterio.features.rasterize
+
+ From rasterio documentation:
+
+ Parameters
+ ----------
+ shapes : iterable of (geometry, value) pairs or iterable over
+ geometries.
+ out_shape : tuple or list
+ Shape of output numpy ndarray.
+ fill : int or float, optional
+ Fill value for all areas not covered by input geometries.
+ out : numpy ndarray
+ Array of same shape and data type as `image` in which to store
+ results.
+ transform : affine.Affine
+ Transformation from pixel coordinates of `image` to the
+ coordinate system of the input `shapes`.
+ all_touched : boolean, optional
+ If True, all pixels touched by geometries will be burned in. If
+ false, only pixels whose center is within the polygon or that
+ are selected by Bresenham's line algorithm will be burned in.
+ default_value : int or float, optional
+ Used as value for all geometries, if not provided in `shapes`.
+ dtype : numpy data type
+ Used as data type for results, if `out` is not provided.
+ """
+ if not _HAS_RASTERIO:
+ raise ImportError('Requires rasterio module')
+ if out_shape is None:
+ out_shape = self.shape
+ if transform is None:
+ transform = self.affine
+ raster = rasterio.features.rasterize(shapes, out_shape=out_shape, fill=fill,
+ out=out, transform=transform,
+ all_touched=all_touched,
+ default_value=default_value, dtype=dtype)
+ return raster
+
+ def snap_to_mask(self, mask, xy, return_dist=True):
+ """
+ Snap a set of xy coordinates (xy) to the nearest nonzero cells in a raster (mask)
+
+ Parameters
+ ----------
+ mask: numpy ndarray-like with shape (M, K)
+ A raster dataset with nonzero elements indicating cells to match to (e.g:
+ a flow accumulation grid with ones indicating cells above a certain threshold).
+ xy: numpy ndarray-like with shape (N, 2)
+ Points to match (example: gage location coordinates).
+ return_dist: If true, return the distances from xy to the nearest matched point in mask.
+ """
+
+ if not _HAS_SCIPY:
+ raise ImportError('Requires scipy.spatial module')
+ if isinstance(mask, Raster):
+ affine = mask.viewfinder.affine
+ elif isinstance(mask, str):
+ affine = getattr(self, mask).viewfinder.affine
+ mask_ix = np.where(mask.ravel())[0]
+ yi, xi = np.unravel_index(mask_ix, mask.shape)
+ xiyi = np.vstack([xi, yi])
+ x, y = affine * xiyi
+ tree_xy = np.column_stack([x, y])
+ tree = scipy.spatial.cKDTree(tree_xy)
+ dist, ix = tree.query(xy)
+ if return_dist:
+ return tree_xy[ix], dist
+ else:
+ return tree_xy[ix]
diff --git a/pysheds/pview.py b/pysheds/pview.py
new file mode 100644
index 0000000..f515055
--- /dev/null
+++ b/pysheds/pview.py
@@ -0,0 +1,395 @@
+import numpy as np
+from scipy import spatial
+from scipy import interpolate
+import pyproj
+from affine import Affine
+from distutils.version import LooseVersion
+
+_OLD_PYPROJ = LooseVersion(pyproj.__version__) < LooseVersion('2.2')
+_pyproj_init = '+init=epsg:4326' if _OLD_PYPROJ else 'epsg:4326'
+
+class Raster(np.ndarray):
+ def __new__(cls, input_array, viewfinder, metadata=None):
+ obj = np.asarray(input_array).view(cls)
+ try:
+ assert(issubclass(type(viewfinder), BaseViewFinder))
+ except:
+ raise ValueError("Must initialize with a ViewFinder")
+ obj.viewfinder = viewfinder
+ obj.metadata = metadata
+ return obj
+
+ def __array_finalize__(self, obj):
+ if obj is None:
+ return
+ self.viewfinder = getattr(obj, 'viewfinder', None)
+ self.metadata = getattr(obj, 'metadata', None)
+
+ @property
+ def bbox(self):
+ return self.viewfinder.bbox
+ @property
+ def coords(self):
+ return self.viewfinder.coords
+ @property
+ def view_shape(self):
+ return self.viewfinder.shape
+ @property
+ def mask(self):
+ return self.viewfinder.mask
+ @property
+ def nodata(self):
+ return self.viewfinder.nodata
+ @nodata.setter
+ def nodata(self, new_nodata):
+ self.viewfinder.nodata = new_nodata
+ @property
+ def crs(self):
+ return self.viewfinder.crs
+ @property
+ def view_size(self):
+ return np.prod(self.viewfinder.shape)
+ @property
+ def extent(self):
+ bbox = self.viewfinder.bbox
+ extent = (bbox[0], bbox[2], bbox[1], bbox[3])
+ return extent
+ @property
+ def cellsize(self):
+ dy, dx = self.dy_dx
+ cellsize = (dy + dx) / 2
+ return cellsize
+ @property
+ def affine(self):
+ return self.viewfinder.affine
+ @property
+ def properties(self):
+ property_dict = {
+ 'affine' : self.viewfinder.affine,
+ 'shape' : self.viewfinder.shape,
+ 'crs' : self.viewfinder.crs,
+ 'nodata' : self.viewfinder.nodata,
+ 'mask' : self.viewfinder.mask
+ }
+ return property_dict
+ @property
+ def dy_dx(self):
+ return (-self.affine.e, self.affine.a)
+
+class BaseViewFinder():
+ def __init__(self, shape=None, mask=None, nodata=None,
+ crs=pyproj.Proj(_pyproj_init), y_coord_ix=0, x_coord_ix=1):
+ if shape is not None:
+ self.shape = shape
+ else:
+ self.shape = (0,0)
+ self.crs = crs
+ if nodata is None:
+ self.nodata = np.nan
+ else:
+ self.nodata = nodata
+ if mask is None:
+ self.mask = np.ones(shape).astype(bool)
+ else:
+ self.mask = mask
+ self.y_coord_ix = y_coord_ix
+ self.x_coord_ix = x_coord_ix
+
+ @property
+ def shape(self):
+ return self._shape
+ @shape.setter
+ def shape(self, new_shape):
+ self._shape = new_shape
+ @property
+ def mask(self):
+ return self._mask
+ @mask.setter
+ def mask(self, new_mask):
+ assert (new_mask.shape == self.shape)
+ self._mask = new_mask
+ @property
+ def nodata(self):
+ return self._nodata
+ @nodata.setter
+ def nodata(self, new_nodata):
+ self._nodata = new_nodata
+ @property
+ def crs(self):
+ return self._crs
+ @crs.setter
+ def crs(self, new_crs):
+ self._crs = new_crs
+ @property
+ def size(self):
+ return np.prod(self.shape)
+
+class RegularViewFinder(BaseViewFinder):
+ def __init__(self, affine, shape, mask=None, nodata=None,
+ crs=pyproj.Proj(_pyproj_init),
+ y_coord_ix=0, x_coord_ix=1):
+ if affine is not None:
+ self.affine = affine
+ else:
+ self.affine = Affine(0,0,0,0,0,0)
+ super().__init__(shape=shape, mask=mask, nodata=nodata, crs=crs,
+ y_coord_ix=y_coord_ix, x_coord_ix=x_coord_ix)
+
+ @property
+ def bbox(self):
+ shape = self.shape
+ xmin, ymax = self.affine * (0,0)
+ # TODO: I think this is wrong; +1 not needed
+ xmax, ymin = self.affine * (shape[1], shape[0])
+ _bbox = (xmin, ymin, xmax, ymax)
+ return _bbox
+
+ @property
+ def extent(self):
+ bbox = self.bbox
+ extent = (bbox[0], bbox[2], bbox[1], bbox[3])
+ return extent
+
+ @property
+ def affine(self):
+ return self._affine
+
+ @affine.setter
+ def affine(self, new_affine):
+ assert(isinstance(new_affine, Affine))
+ self._affine = new_affine
+
+ @property
+ def coords(self):
+ coordinates = np.meshgrid(*self.grid_indices(), indexing='ij')
+ return np.vstack(np.dstack(coordinates))
+
+ @coords.setter
+ def coords(self):
+ pass
+
+ @property
+ def dy_dx(self):
+ return (-self.affine.e, self.affine.a)
+
+ @property
+ def properties(self):
+ property_dict = {
+ 'affine' : self.affine,
+ 'shape' : self.shape,
+ 'nodata' : self.nodata,
+ 'crs' : self.crs,
+ 'mask' : self.mask
+ }
+ return property_dict
+
+ @property
+ def axes(self):
+ return self.grid_indices()
+
+ def grid_indices(self, affine=None, shape=None, col_ascending=True, row_ascending=False):
+ """
+ Return row and column coordinates of a bounding box at a
+ given cellsize.
+
+ Parameters
+ ----------
+ shape : tuple of ints (length 2)
+ The shape of the 2D array (rows, columns). Defaults
+ to instance shape.
+ precision : int
+ Precision to use when matching geographic coordinates.
+ """
+ if affine is None:
+ affine = self.affine
+ if shape is None:
+ shape = self.shape
+ y_ix = np.arange(shape[0])
+ x_ix = np.arange(shape[1])
+ if row_ascending:
+ y_ix = y_ix[::-1]
+ if not col_ascending:
+ x_ix = x_ix[::-1]
+ x, _ = affine * np.vstack([x_ix, np.zeros(shape[1])])
+ _, y = affine * np.vstack([np.zeros(shape[0]), y_ix])
+ return y, x
+
+ def move_window(self, dxmin, dymin, dxmax, dymax):
+ """
+ Move bounding box window by integer indices
+ """
+ cell_height, cell_width = self.dy_dx
+ nrows_old, ncols_old = self.shape
+ xmin_old, ymin_old, xmax_old, ymax_old = self.bbox
+ new_bbox = (xmin_old + dxmin*cell_width, ymin_old + dymin*cell_height,
+ xmax_old + dxmax*cell_width, ymax_old + dymax*cell_height)
+ new_shape = (nrows_old + dymax - dymin,
+ ncols_old + dxmax - dxmin)
+ new_mask = np.ones(new_shape).astype(bool)
+ mask_values = self._mask[max(dymin, 0):min(nrows_old + dymax, nrows_old),
+ max(dxmin, 0):min(ncols_old + dxmax, ncols_old)]
+ new_mask[max(0, dymax):max(0, dymax) + mask_values.shape[0],
+ max(0, -dxmin):max(0, -dxmin) + mask_values.shape[1]] = mask_values
+ self.bbox = new_bbox
+ self.shape = new_shape
+ self.mask = new_mask
+
+class IrregularViewFinder(BaseViewFinder):
+ def __init__(self, coords, shape=None, mask=None, nodata=None,
+ crs=pyproj.Proj(_pyproj_init),
+ y_coord_ix=0, x_coord_ix=1):
+ if coords is not None:
+ self.coords = coords
+ else:
+ self.coords = np.asarray([0, 0]).reshape(1, 2)
+ if shape is None:
+ shape = len(coords)
+ super().__init__(shape=shape, mask=mask, nodata=nodata, crs=crs,
+ y_coord_ix=y_coord_ix, x_coord_ix=x_coord_ix)
+ @property
+ def coords(self):
+ return self._coords
+ @coords.setter
+ def coords(self, new_coords):
+ self._coords = new_coords
+ @property
+ def bbox(self):
+ ymin = self.coords[:, self.y_coord_ix].min()
+ ymax = self.coords[:, self.y_coord_ix].max()
+ xmin = self.coords[:, self.x_coord_ix].min()
+ xmax = self.coords[:, self.x_coord_ix].max()
+ return xmin, ymin, xmax, ymax
+ @bbox.setter
+ def bbox(self, new_bbox):
+ pass
+ @property
+ def extent(self):
+ bbox = self.bbox
+ extent = (bbox[0], bbox[2], bbox[1], bbox[3])
+ return extent
+
+class RegularGridViewer():
+ def __init__(self):
+ pass
+
+ @classmethod
+ def _view_affine(cls, data, data_view, target_view, x_tolerance=1e-3, y_tolerance=1e-3):
+ nodata = target_view.nodata
+ view = np.full(target_view.shape, nodata, dtype=data.dtype)
+ viewrows, viewcols = target_view.grid_indices()
+ _, target_row_ix = ~data_view.affine * np.vstack([np.zeros(target_view.shape[0]), viewrows])
+ target_col_ix, _ = ~data_view.affine * np.vstack([viewcols, np.zeros(target_view.shape[1])])
+ y_ix = np.around(target_row_ix).astype(int)
+ x_ix = np.around(target_col_ix).astype(int)
+ y_passed = ((np.abs(y_ix - target_row_ix) < y_tolerance)
+ & (y_ix < data_view.shape[0]) & (y_ix >= 0))
+ x_passed = ((np.abs(x_ix - target_col_ix) < x_tolerance)
+ & (x_ix < data_view.shape[1]) & (x_ix >= 0))
+ view[np.ix_(y_passed, x_passed)] = data[y_ix[y_passed]][:, x_ix[x_passed]]
+ return view
+
+ @classmethod
+ def _view_rectbivariate(cls, data, data_view, target_view, kx=3, ky=3, s=0,
+ x_tolerance=1e-3, y_tolerance=1e-3):
+ t_xmin, t_ymin, t_xmax, t_ymax = target_view.bbox
+ d_xmin, d_ymin, d_xmax, d_ymax = data_view.bbox
+ nodata = target_view.nodata
+ target_dx, target_dy = target_view.affine.a, target_view.affine.e
+ data_dx, data_dy = data_view.affine.a, data_view.affine.e
+ viewrows, viewcols = target_view.grid_indices(col_ascending=True,
+ row_ascending=True)
+ rows, cols = data_view.grid_indices(col_ascending=True,
+ row_ascending=True)
+ viewrows += target_dy
+ viewcols += target_dx
+ rows += data_dy
+ cols += data_dx
+ row_bool = (rows <= t_ymax + y_tolerance) & (rows >= t_ymin - y_tolerance)
+ col_bool = (cols <= t_xmax + x_tolerance) & (cols >= t_xmin - x_tolerance)
+ rbs_interpolator = (interpolate.
+ RectBivariateSpline(rows[row_bool],
+ cols[col_bool],
+ data[np.ix_(row_bool[::-1], col_bool)],
+ kx=kx, ky=ky, s=s))
+ xy_query = np.vstack(np.dstack(np.meshgrid(viewrows, viewcols, indexing='ij')))
+ view = rbs_interpolator.ev(xy_query[:,0], xy_query[:,1]).reshape(target_view.shape)
+ return view
+
+ @classmethod
+ def _view_rectspherebivariate(cls, data, data_view, target_view, coords_in_radians=False,
+ kx=3, ky=3, s=0, x_tolerance=1e-3, y_tolerance=1e-3):
+ t_xmin, t_ymin, t_xmax, t_ymax = target_view.bbox
+ d_xmin, d_ymin, d_xmax, d_ymax = data_view.bbox
+ nodata = target_view.nodata
+ yx_tolerance = np.sqrt(x_tolerance**2 + y_tolerance**2)
+ target_dx, target_dy = target_view.affine.a, target_view.affine.e
+ data_dx, data_dy = data_view.affine.a, data_view.affine.e
+ viewrows, viewcols = target_view.grid_indices(col_ascending=True,
+ row_ascending=True)
+ rows, cols = data_view.grid_indices(col_ascending=True,
+ row_ascending=True)
+ viewrows += target_dy
+ viewcols += target_dx
+ rows += data_dy
+ cols += data_dx
+ row_bool = (rows <= t_ymax + y_tolerance) & (rows >= t_ymin - y_tolerance)
+ col_bool = (cols <= t_xmax + x_tolerance) & (cols >= t_xmin - x_tolerance)
+ if not coords_in_radians:
+ rows = np.radians(rows) + np.pi/2
+ cols = np.radians(cols) + np.pi
+ viewrows = np.radians(viewrows) + np.pi/2
+ viewcols = np.radians(viewcols) + np.pi
+ rsbs_interpolator = (interpolate.
+ RectBivariateSpline(rows[row_bool],
+ cols[col_bool],
+ data[np.ix_(row_bool[::-1], col_bool)],
+ kx=kx, ky=ky, s=s))
+ xy_query = np.vstack(np.dstack(np.meshgrid(viewrows, viewcols, indexing='ij')))
+ view = rsbs_interpolator.ev(xy_query[:,0], xy_query[:,1]).reshape(target_view.shape)
+ return view
+
+class IrregularGridViewer():
+ def __init__(self):
+ pass
+
+ @classmethod
+ def _view_kd_2d(cls, data, data_view, target_view, x_tolerance=1e-3, y_tolerance=1e-3):
+ t_xmin, t_ymin, t_xmax, t_ymax = target_view.bbox
+ d_xmin, d_ymin, d_xmax, d_ymax = data_view.bbox
+ nodata = target_view.nodata
+ view = np.full(target_view.shape, nodata)
+ viewcoords = target_view.coords
+ datacoords = data_view.coords
+ yx_tolerance = np.sqrt(x_tolerance**2 + y_tolerance**2)
+ row_bool = ((datacoords[:,0] <= t_ymax + y_tolerance) &
+ (datacoords[:,0] >= t_ymin - y_tolerance))
+ col_bool = ((datacoords[:,1] <= t_xmax + x_tolerance) &
+ (datacoords[:,1] >= t_xmin - x_tolerance))
+ yx_tree = datacoords[row_bool & col_bool]
+ tree = spatial.cKDTree(yx_tree)
+ yx_dist, yx_ix = tree.query(viewcoords)
+ yx_passed = yx_dist <= yx_tolerance
+ view.flat[yx_passed] = data.flat[row_bool & col_bool].flat[yx_ix[yx_passed]]
+ return view
+
+ @classmethod
+ def _view_griddata(cls, data, data_view, target_view, method='nearest',
+ x_tolerance=1e-3, y_tolerance=1e-3):
+ t_xmin, t_ymin, t_xmax, t_ymax = target_view.bbox
+ d_xmin, d_ymin, d_xmax, d_ymax = data_view.bbox
+ nodata = target_view.nodata
+ view = np.full(target_view.shape, nodata)
+ viewcoords = target_view.coords
+ datacoords = data_view.coords
+ yx_tolerance = np.sqrt(x_tolerance**2 + y_tolerance**2)
+ row_bool = ((datacoords[:,0] <= t_ymax + y_tolerance) &
+ (datacoords[:,0] >= t_ymin - y_tolerance))
+ col_bool = ((datacoords[:,1] <= t_xmax + x_tolerance) &
+ (datacoords[:,1] >= t_xmin - x_tolerance))
+ yx_grid = datacoords[row_bool & col_bool]
+ view = interpolate.griddata(yx_grid,
+ data.flat[row_bool & col_bool],
+ viewcoords, method=method,
+ fill_value=nodata)
+ view = view.reshape(target_view.shape)
+ return view
diff --git a/pysheds/sgrid.py b/pysheds/sgrid.py
new file mode 100644
index 0000000..9433439
--- /dev/null
+++ b/pysheds/sgrid.py
@@ -0,0 +1,1923 @@
+import sys
+import ast
+import copy
+import pyproj
+import numpy as np
+import pandas as pd
+import geojson
+from affine import Affine
+from distutils.version import LooseVersion
+try:
+ import skimage.measure
+ import skimage.morphology
+ _HAS_SKIMAGE = True
+except:
+ _HAS_SKIMAGE = False
+try:
+ import rasterio
+ import rasterio.features
+ _HAS_RASTERIO = True
+except:
+ _HAS_RASTERIO = False
+
+_OLD_PYPROJ = LooseVersion(pyproj.__version__) < LooseVersion('2.2')
+_pyproj_crs = lambda Proj: Proj.crs if not _OLD_PYPROJ else Proj
+_pyproj_crs_is_geographic = 'is_latlong' if _OLD_PYPROJ else 'is_geographic'
+_pyproj_init = '+init=epsg:4326' if _OLD_PYPROJ else 'epsg:4326'
+
+# Import input/output functions
+import pysheds.io
+
+# Import viewing functions
+from pysheds.sview import Raster
+from pysheds.sview import View, ViewFinder
+
+# Import numba functions
+import pysheds._sgrid as _self
+
+class sGrid():
+ """
+ Container class for holding, aligning, and manipulating gridded data.
+
+ Attributes
+ ==========
+ viewfinder : Class containing all information about the coordinate system
+ of the grid object. Includes the `affine`, `shape`, `crs`,
+ `nodata` and `mask` attributes.
+ affine : Affine transformation matrix (uses affine module).
+ shape : The shape of the grid (number of rows, number of columns).
+ crs : The coordinate reference system.
+ nodata : The value indicating `no data`.
+ mask : A boolean array used to mask grid cells; may be used to indicate
+ which cells lie inside a catchment.
+ bbox : The bounding box of the grid (xmin, ymin, xmax, ymax).
+ extent : The extent of the grid (xmin, xmax, ymin, ymax).
+ size : The number of cells in the grid.
+
+ Methods
+ =======
+ --------
+ File I/O
+ --------
+ read_ascii : Read an ascii grid from a file and return a Raster object.
+ read_raster : Read a raster image file and return a Raster object.
+ from_ascii : Initializes Grid from an ascii file and return a new Grid instance.
+ from_raster : Initializes Grid from a raster image file or Raster object and
+ return a new Grid instance.
+ to_ascii : Writes current "view" of a gridded dataset to an ascii file.
+ to_raster : Writes current "view" of a gridded dataset to a raster image file.
+ ----------
+ Hydrologic
+ ----------
+ flowdir : Generate a flow direction grid from a given digital elevation dataset.
+ catchment : Delineate the watershed for a given pour point (x, y).
+ accumulation : Compute the number of cells upstream of each cell; if weights are
+ given, compute the sum of weighted cells upstream of each cell.
+ distance_to_outlet : Compute the (weighted) distance from each cell to a given
+ pour point, moving downstream.
+ distance_to_ridge : Compute the (weighted) distance from each cell to its originating
+ drainage divide, moving upstream.
+ compute_hand : Compute the height above nearest drainage (HAND).
+ stream_order : Compute the (strahler) stream order.
+ extract_river_network : Extract river segments from a catchment and return a geojson
+ object.
+ cell_dh : Compute the drop in elevation from each cell to its downstream neighbor.
+ cell_distances : Compute the distance from each cell to its downstream neighbor.
+ cell_slopes : Compute the slope between each cell and its downstream neighbor.
+ fill_pits : Fill single-celled pits in a digital elevation dataset.
+ fill_depressions : Fill multi-celled depressions in a digital elevation dataset.
+ resolve_flats : Remove flats from a digital elevation dataset.
+ detect_pits : Detect single-celled pits in a digital elevation dataset.
+ detect_depressions : Detect multi-celled depressions in a digital elevation dataset.
+ detect_flats : Detect flats in a digital elevation dataset.
+ ---------------
+ Data Processing
+ ---------------
+ view : Returns a "view" of a dataset defined by the grid's viewfinder.
+ clip_to : Clip the viewfinder to the smallest area containing all non-
+ null gridcells for a provided dataset.
+ nearest_cell : Returns the index (column, row) of the cell closest
+ to a given geographical coordinate (x, y).
+ snap_to_mask : Snaps a set of points to the nearest nonzero cell in a boolean mask;
+ useful for finding pour points from an accumulation raster.
+ """
+
+ def __init__(self, viewfinder=None):
+ if viewfinder is not None:
+ try:
+ assert isinstance(viewfinder, ViewFinder)
+ except:
+ raise TypeError('viewfinder must be an instance of ViewFinder.')
+ self._viewfinder = viewfinder
+ else:
+ self._viewfinder = ViewFinder(**self.defaults)
+
+ def __repr__(self):
+ return repr(self.viewfinder)
+
+ @property
+ def viewfinder(self):
+ return self._viewfinder
+
+ @viewfinder.setter
+ def viewfinder(self, new_viewfinder):
+ try:
+ assert isinstance(new_viewfinder, ViewFinder)
+ except:
+ raise TypeError('viewfinder must be an instance of ViewFinder.')
+ self._viewfinder = new_viewfinder
+
+ @property
+ def defaults(self):
+ props = {
+ 'affine' : Affine(1.,0.,0.,0.,1.,0.),
+ 'shape' : (1,1),
+ 'nodata' : 0,
+ 'crs' : pyproj.Proj(_pyproj_init),
+ }
+ return props
+
+ @property
+ def affine(self):
+ return self.viewfinder.affine
+
+ @property
+ def shape(self):
+ return self.viewfinder.shape
+
+ @property
+ def nodata(self):
+ return self.viewfinder.nodata
+
+ @property
+ def crs(self):
+ return self.viewfinder.crs
+
+ @property
+ def mask(self):
+ return self.viewfinder.mask
+
+ @affine.setter
+ def affine(self, new_affine):
+ self.viewfinder.affine = new_affine
+
+ @shape.setter
+ def shape(self, new_shape):
+ self.viewfinder.shape = new_shape
+
+ @nodata.setter
+ def nodata(self, new_nodata):
+ self.viewfinder.nodata = new_nodata
+
+ @crs.setter
+ def crs(self, new_crs):
+ self.viewfinder.crs = new_crs
+
+ @mask.setter
+ def mask(self, new_mask):
+ self.viewfinder.mask = new_mask
+
+ @property
+ def bbox(self):
+ return self.viewfinder.bbox
+
+ @property
+ def size(self):
+ return self.viewfinder.size
+
+ @property
+ def extent(self):
+ bbox = self.bbox
+ extent = (self.bbox[0], self.bbox[2], self.bbox[1], self.bbox[3])
+ return extent
+
+ def read_ascii(self, data, skiprows=6, mask=None,
+ crs=pyproj.Proj(_pyproj_init), xll='lower', yll='lower',
+ metadata={}, **kwargs):
+ """
+ Reads data from an ascii file and returns a Raster.
+
+ Parameters
+ ----------
+ data : str
+ File name or path.
+ skiprows : int (optional)
+ The number of rows taken up by the header (defaults to 6).
+ crs : pyroj.Proj
+ Coordinate reference system of ascii data.
+ xll : 'lower' or 'center' (str)
+ Whether XLLCORNER or XLLCENTER is used.
+ yll : 'lower' or 'center' (str)
+ Whether YLLCORNER or YLLCENTER is used.
+ metadata : dict
+ Other attributes describing dataset, such as direction
+ mapping for flow direction files. e.g.:
+ metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
+ 'routing' : 'd8'}
+
+ Additional keyword arguments (**kwargs) are passed to numpy.loadtxt()
+
+ Returns
+ -------
+ out : Raster
+ Raster object containing loaded data.
+ """
+ return pysheds.io.read_ascii(data, skiprows=skiprows, mask=mask,
+ crs=crs, xll=xll, yll=yll, metadata=metadata,
+ **kwargs)
+
+ def read_raster(self, data, band=1, window=None, window_crs=None,
+ metadata={}, mask_geometry=False, **kwargs):
+ """
+ Reads data from a raster file and returns a Raster object.
+
+ Parameters
+ ----------
+ data : str
+ File name or path.
+ band : int
+ The band number to read if multiband.
+ window : tuple
+ If using windowed reading, specify window (xmin, ymin, xmax, ymax).
+ window_crs : pyproj.Proj instance
+ Coordinate reference system of window. If None, use the raster file's crs.
+ mask_geometry : iterable object
+ Geometries indicating where data should be read. The values must be a
+ GeoJSON-like dict or an object that implements the Python geo interface
+ protocol (such as a Shapely Polygon).
+ metadata : dict
+ Other attributes describing dataset, such as direction
+ mapping for flow direction files. e.g.:
+ metadata={'dirmap' : (64, 128, 1, 2, 4, 8, 16, 32),
+ 'routing' : 'd8'}
+
+ Additional keyword arguments are passed to rasterio.open()
+
+ Returns
+ -------
+ out : Raster
+ Raster object containing loaded data.
+ """
+ return pysheds.io.read_raster(data=data, band=band, window=window,
+ window_crs=window_crs, metadata=metadata,
+ mask_geometry=mask_geometry, **kwargs)
+
+ def to_ascii(self, data, file_name, target_view=None, delimiter=' ', fmt=None,
+ interpolation='nearest', apply_input_mask=False,
+ apply_output_mask=True, affine=None, shape=None, crs=None,
+ mask=None, nodata=None, dtype=None, **kwargs):
+ """
+ Writes a Raster object to a formatted ascii text file.
+
+ Parameters
+ ----------
+ data: Raster
+ Raster dataset to write.
+ file_name : str
+ Name of file or path to write to.
+ target_view : ViewFinder
+ ViewFinder to use when writing data. Defaults to self.viewfinder.
+ delimiter : string (optional)
+ Delimiter to use in output file (defaults to ' ')
+ fmt : str
+ Formatting for numeric data. Passed to np.savetxt.
+ interpolation : 'nearest', 'linear'
+ Interpolation method to be used if spatial reference systems
+ are not congruent.
+ apply_input_mask : bool
+ If True, mask the input Raster according to self.mask.
+ apply_output_mask : bool
+ If True, mask the output Raster according to target_view.mask.
+ affine : affine.Affine
+ Affine transformation matrix (overrides target_view.affine)
+ shape : tuple of ints (length 2)
+ Shape of desired Raster (overrides target_view.shape)
+ crs : pyproj.Proj
+ Coordinate reference system (overrides target_view.crs)
+ mask : np.ndarray or Raster
+ Boolean array to mask output (overrides target_view.mask)
+ nodata : int or float
+ Value indicating no data in output Raster (overrides target_view.nodata)
+ dtype : numpy datatype
+ Desired datatype of the output array.
+
+ Additional keyword arguments (**kwargs) are passed to np.savetxt
+ """
+ if target_view is None:
+ target_view = self.viewfinder
+ return pysheds.io.to_ascii(data, file_name, target_view=target_view,
+ delimiter=delimiter, fmt=fmt, interpolation=interpolation,
+ apply_input_mask=apply_input_mask,
+ apply_output_mask=apply_output_mask,
+ affine=affine, shape=shape, crs=crs,
+ mask=mask, nodata=nodata,
+ dtype=dtype, **kwargs)
+
+ def to_raster(self, data, file_name, target_view=None, profile=None, view=True,
+ blockxsize=256, blockysize=256, interpolation='nearest',
+ apply_input_mask=False, apply_output_mask=True, affine=None,
+ shape=None, crs=None, mask=None, nodata=None, dtype=None,
+ **kwargs):
+ """
+ Writes gridded data to a raster.
+
+ Parameters
+ ----------
+ data: Raster
+ Raster dataset to write.
+ file_name : str
+ Name of file or path to write to.
+ target_view : ViewFinder
+ ViewFinder to use when writing data. Defaults to self.viewfinder.
+ profile : dict
+ Profile of driver for writing data. See rasterio documentation.
+ blockxsize : int
+ Size of blocks in horizontal direction. See rasterio documentation.
+ blockysize : int
+ Size of blocks in vertical direction. See rasterio documentation.
+ interpolation : 'nearest', 'linear'
+ Interpolation method to be used if spatial reference systems
+ are not congruent.
+ apply_input_mask : bool
+ If True, mask the input Raster according to self.mask.
+ apply_output_mask : bool
+ If True, mask the output Raster according to target_view.mask.
+ affine : affine.Affine
+ Affine transformation matrix (overrides target_view.affine)
+ shape : tuple of ints (length 2)
+ Shape of desired Raster (overrides target_view.shape)
+ crs : pyproj.Proj
+ Coordinate reference system (overrides target_view.crs)
+ mask : np.ndarray or Raster
+ Boolean array to mask output (overrides target_view.mask)
+ nodata : int or float
+ Value indicating no data in output Raster (overrides target_view.nodata)
+ dtype : numpy datatype
+ Desired datatype of the output array.
+ """
+ if target_view is None:
+ target_view = self.viewfinder
+ return pysheds.io.to_raster(data, file_name, target_view=target_view,
+ profile=profile, view=view,
+ blockxsize=blockxsize,
+ blockysize=blockysize,
+ interpolation=interpolation,
+ apply_input_mask=apply_input_mask,
+ apply_output_mask=apply_output_mask,
+ affine=affine, shape=shape, crs=crs,
+ mask=mask, nodata=nodata, dtype=dtype,
+ **kwargs)
+
+ @classmethod
+ def from_ascii(cls, data, **kwargs):
+ """
+ Instantiates grid from an ascii text file.
+
+ Parameters
+ ----------
+ data: str
+ File path of ascii text file.
+
+ Additional keyword arguments (**kwargs) are passed to self.read_ascii.
+
+ Returns
+ -------
+ new_grid : Grid
+ A new Grid instance with its ViewFinder defined by the ascii file.
+ """
+ newinstance = cls()
+ data = newinstance.read_ascii(data, **kwargs)
+ newinstance.viewfinder = data.viewfinder
+ return newinstance
+
+ @classmethod
+ def from_raster(cls, data, **kwargs):
+ """
+ Instantiates grid from a raster object or raster file.
+
+ Parameters
+ ----------
+ data: Raster or str representing file path
+ Raster data to use for instantiation.
+
+ Additional keyword arguments (**kwargs) are passed to self.read_raster if
+ data is a file path.
+
+ Returns
+ -------
+ new_grid : Grid
+ A new Grid instance with its ViewFinder defined by the input raster.
+ """
+ newinstance = cls()
+ if isinstance(data, Raster):
+ newinstance.viewfinder = data.viewfinder
+ return newinstance
+ elif isinstance(data, str):
+ data = newinstance.read_raster(data, **kwargs)
+ newinstance.viewfinder = data.viewfinder
+ return newinstance
+ else:
+ raise TypeError('`data` must be a Raster or str.')
+
+ def view(self, data, data_view=None, target_view=None, interpolation='nearest',
+ apply_input_mask=False, apply_output_mask=True,
+ affine=None, shape=None, crs=None, mask=None, nodata=None,
+ dtype=None, inherit_metadata=True, new_metadata={}, **kwargs):
+ """
+ Return a copy of a gridded dataset transformed to a new spatial reference system. The
+ spatial reference system is determined by a ViewFinder instance, and is completely
+ defined by an affine transformation matrix (affine), a desired shape (shape),
+ a coordinate reference system (crs), a boolean mask (mask), and a sentinel value
+ indicating `no data` (nodata). The target spatial reference system defaults to the
+ `viewfinder` attribute of the Grid instance.
+
+ Parameters
+ ----------
+ data : Raster
+ A Raster object containing the gridded data and its spatial reference system
+ (as defined by its ViewFinder).
+ data_view : ViewFinder
+ The spatial reference system of the data. Defaults to the Raster dataset's
+ `viewfinder` attribute.
+ target_view : ViewFinder
+ The desired spatial reference system. Defaults the the Grid instance's
+ `viewfinder` attribute.
+ interpolation : 'nearest', 'linear'
+ Interpolation method to be used if spatial reference systems
+ are not congruent.
+ apply_input_mask : bool
+ If True, mask the input Raster according to data.mask.
+ apply_output_mask : bool
+ If True, mask the output Raster according to grid.mask.
+ affine : affine.Affine
+ Affine transformation matrix (overrides target_view.affine)
+ shape : tuple of ints (length 2)
+ Shape of desired Raster (overrides target_view.shape)
+ crs : pyproj.Proj
+ Coordinate reference system (overrides target_view.crs)
+ mask : np.ndarray or Raster
+ Boolean array to mask output (overrides target_view.mask)
+ nodata : int or float
+ Value indicating no data in output Raster (overrides target_view.nodata)
+ dtype : numpy datatype
+ Desired datatype of the output array.
+ inherit_metadata : bool
+ If True, output Raster inherits metadata from input data.
+ new_metadata : dict
+ Optional metadata to add to output Raster.
+
+ Returns
+ -------
+ out : Raster
+ View of the input Raster at the provided target view.
+ """
+ # Check input type
+ try:
+ assert isinstance(data, Raster)
+ except:
+ raise TypeError("data must be a Raster instance")
+ # Check interpolation method
+ try:
+ interpolation = interpolation.lower()
+ assert(interpolation in {'nearest', 'linear'})
+ except:
+ raise ValueError("Interpolation method must be one of: "
+ "'nearest', 'linear'")
+ # If no target view is provided, use grid's viewfinder
+ if target_view is None:
+ target_view = self.viewfinder
+ out = View.view(data, target_view, data_view=data_view,
+ interpolation=interpolation,
+ apply_input_mask=apply_input_mask,
+ apply_output_mask=apply_output_mask,
+ affine=affine, shape=shape,
+ crs=crs, mask=mask, nodata=nodata,
+ dtype=dtype,
+ inherit_metadata=inherit_metadata,
+ new_metadata=new_metadata)
+ # Return output
+ return out
+
+ def nearest_cell(self, x, y, affine=None, snap='corner'):
+ """
+ Returns the index of the cell (column, row) closest
+ to a given geographical coordinate.
+
+ Parameters
+ ----------
+ x : int or float
+ x coordinate.
+ y : int or float
+ y coordinate.
+ affine : affine.Affine
+ Affine transformation that defines the translation between
+ geographic x/y coordinate and array row/column coordinate.
+ Defaults to self.affine.
+ snap : str
+ Indicates the cell indexing method. If "corner", will resolve to
+ snapping the (x,y) geometry to the index of the nearest top-left
+ cell corner. If "center", will return the index of the cell that
+ the geometry falls within.
+ Returns
+ -------
+ col, row : tuple of ints
+ Column index and row index
+ """
+ if not affine:
+ affine = self.affine
+ return View.nearest_cell(x, y, affine=affine, snap=snap)
+
+ def clip_to(self, data, pad=(0,0,0,0)):
+ """
+ Clip grid to bbox representing the smallest area that contains all
+ non-null data for a given dataset.
+
+ Parameters
+ ----------
+ data : Raster
+ Raster dataset to clip to.
+ pad : tuple of ints (length 4)
+ Apply padding to edges of new view (left, bottom, right, top). A pad of
+ (1,1,1,1), for instance, will add a one-cell rim around the new view.
+ """
+ # get class attributes
+ new_raster = View.trim_zeros(data, pad=pad)
+ self.viewfinder = new_raster.viewfinder
+
+ def flowdir(self, dem, routing='d8', flats=-1, pits=-2, nodata_out=None,
+ dirmap=(64, 128, 1, 2, 4, 8, 16, 32), **kwargs):
+ """
+ Generates a flow direction raster from a DEM grid. Both d8 and d-infinity routing
+ are supported.
+
+ Parameters
+ ----------
+ dem : Raster
+ Digital elevation model data.
+ flats : int
+ Value to indicate flat areas in output array.
+ pits : int
+ Value to indicate pits in output array.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ - If d8 routing is used, defaults to 0
+ - If dinf routing is used, defaults to np.nan
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ fdir : Raster
+ Raster indicating flow directions.
+ - If d8 routing is used, dtype is int64. Each cell indicates the flow
+ direction defined by dirmap.
+ - If dinf routing is used, dtype is float64. Each cell indicates the flow
+ angle (from 0 to 2 pi radians).
+ """
+ default_metadata = {'dirmap' : dirmap, 'flats' : flats, 'pits' : pits}
+ input_overrides = {'dtype' : np.float64, 'nodata' : dem.nodata}
+ kwargs.update(input_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ nodata_cells = self._get_nodata_cells(dem)
+ if routing.lower() == 'd8':
+ if nodata_out is None:
+ nodata_out = 0
+ fdir = self._d8_flowdir(dem=dem, nodata_cells=nodata_cells,
+ nodata_out=nodata_out, flats=flats,
+ pits=pits, dirmap=dirmap)
+ elif routing.lower() == 'dinf':
+ if nodata_out is None:
+ nodata_out = np.nan
+ fdir = self._dinf_flowdir(dem=dem, nodata_cells=nodata_cells,
+ nodata_out=nodata_out, flats=flats,
+ pits=pits, dirmap=dirmap)
+ else:
+ raise ValueError('Routing method must be one of: `d8`, `dinf`')
+ fdir.metadata.update(default_metadata)
+ return fdir
+
+
+ def _d8_flowdir(self, dem, nodata_cells, nodata_out=0, flats=-1, pits=-2,
+ dirmap=(64, 128, 1, 2, 4, 8, 16, 32)):
+ # Make sure nothing flows to the nodata cells
+ dem[nodata_cells] = dem.max() + 1
+ # Get cell spans and heights
+ dx = abs(dem.affine.a)
+ dy = abs(dem.affine.e)
+ # Compute D8 flow directions
+ fdir = _self._d8_flowdir_numba(dem, dx, dy, dirmap, nodata_cells,
+ nodata_out, flat=flats, pit=pits)
+ return self._output_handler(data=fdir, viewfinder=dem.viewfinder,
+ metadata=dem.metadata, nodata=nodata_out)
+
+ def _dinf_flowdir(self, dem, nodata_cells, nodata_out=np.nan, flats=-1, pits=-2,
+ dirmap=(64, 128, 1, 2, 4, 8, 16, 32)):
+ # Make sure nothing flows to the nodata cells
+ dem[nodata_cells] = dem.max() + 1
+ dx = abs(dem.affine.a)
+ dy = abs(dem.affine.e)
+ fdir = _self._dinf_flowdir_numba(dem, dx, dy, nodata_out, flat=flats, pit=pits)
+ return self._output_handler(data=fdir, viewfinder=dem.viewfinder,
+ metadata=dem.metadata, nodata=nodata_out)
+
+ def catchment(self, x, y, fdir, pour_value=None, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=False, xytype='coordinate', routing='d8', snap='corner', **kwargs):
+ """
+ Delineates a watershed from a given pour point (x, y).
+
+ Parameters
+ ----------
+ x : float or int
+ x coordinate (or index) of pour point
+ y : float or int
+ y coordinate (or index) of pour point
+ fdir : Raster
+ Flow direction data.
+ pour_value : int or None
+ If not None, value to represent pour point in catchment
+ grid.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_out : int or float
+ Value to indicate `no data` in output array.
+ xytype : 'coordinate' or 'index'
+ How to interpret parameters 'x' and 'y'.
+ 'coordinate' : x and y represent geographic coordinates
+ (will be passed to self.nearest_cell).
+ 'index' : x and y represent the column and row
+ indices of the pour point.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions
+ snap : str
+ Function to use for self.nearest_cell:
+ 'corner' : numpy.around()
+ 'center' : numpy.floor()
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ catch : Raster
+ Raster indicating cells that lie in the catchment. The dtype will be
+ np.bool8, unless `pour_value` is specified, in which case the dtype will
+ be the smallest dtype capable of representing the pour value.
+ """
+ if routing.lower() == 'd8':
+ input_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ elif routing.lower() == 'dinf':
+ input_overrides = {'dtype' : np.float64, 'nodata' : fdir.nodata}
+ else:
+ raise ValueError('Routing method must be one of: `d8`, `dinf`')
+ kwargs.update(input_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ xmin, ymin, xmax, ymax = fdir.bbox
+ if xytype in {'label', 'coordinate'}:
+ if (x < xmin) or (x > xmax) or (y < ymin) or (y > ymax):
+ raise ValueError('Pour point ({}, {}) is out of bounds for dataset with bbox {}.'
+ .format(x, y, (xmin, ymin, xmax, ymax)))
+ elif xytype == 'index':
+ if (x < 0) or (y < 0) or (x >= fdir.shape[1]) or (y >= fdir.shape[0]):
+ raise ValueError('Pour point ({}, {}) is out of bounds for dataset with shape {}.'
+ .format(x, y, fdir.shape))
+ if routing.lower() == 'd8':
+ catch = self._d8_catchment(x, y, fdir=fdir, pour_value=pour_value, dirmap=dirmap,
+ nodata_out=nodata_out, xytype=xytype, snap=snap)
+ elif routing.lower() == 'dinf':
+ catch = self._dinf_catchment(x, y, fdir=fdir, pour_value=pour_value, dirmap=dirmap,
+ nodata_out=nodata_out, xytype=xytype, snap=snap)
+ return catch
+
+ def _d8_catchment(self, x, y, fdir, pour_value=None, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=False, xytype='coordinate', snap='corner'):
+ # Pad the rim
+ left, right, top, bottom = self._pop_rim(fdir, nodata=0)
+ # If xytype is 'coordinate', delineate catchment based on cell nearest
+ # to given geographic coordinate
+ if xytype in {'label', 'coordinate'}:
+ x, y = self.nearest_cell(x, y, fdir.affine, snap)
+ # Delineate the catchment
+ catch = _self._d8_catchment_numba(fdir, (y, x), dirmap)
+ if pour_value is not None:
+ catch[y, x] = pour_value
+ catch = self._output_handler(data=catch, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return catch
+
+ def _dinf_catchment(self, x, y, fdir, pour_value=None, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=False, xytype='coordinate', snap='corner'):
+ # Find nodata cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ # Split dinf flowdir
+ fdir_0, fdir_1, prop_0, prop_1 = _self._angle_to_d8_numba(fdir, dirmap, nodata_cells)
+ # Pad the rim
+ left_0, right_0, top_0, bottom_0 = self._pop_rim(fdir_0, nodata=0)
+ left_1, right_1, top_1, bottom_1 = self._pop_rim(fdir_1, nodata=0)
+ # Valid if the dataset is a view.
+ if xytype in {'label', 'coordinate'}:
+ x, y = self.nearest_cell(x, y, fdir.affine, snap)
+ # Delineate the catchment
+ catch = _self._dinf_catchment_numba(fdir_0, fdir_1, (y, x), dirmap)
+ # if pour point needs to be a special value, set it
+ if pour_value is not None:
+ catch[y, x] = pour_value
+ catch = self._output_handler(data=catch, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return catch
+
+ def accumulation(self, fdir, weights=None, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=0., efficiency=None, routing='d8', cycle_size=1, **kwargs):
+ """
+ Generates a flow accumulation raster. If no weights are provided, the value of each cell
+ is equal to the number of upstream cells. If weights are provided, the value of each cell
+ is the sum of upstream weights.
+
+ Parameters
+ ----------
+ fdir : Raster
+ Flow direction data.
+ weights: Raster
+ Weights to be applied to each accumulation cell. Defaults to the
+ vector of all ones.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ efficiency: Raster
+ Transport efficiency, relative correction factor applied to the
+ outflow of each cell. Nodata will be set to 1, i.e. no correction.
+ nodata_out : int or float
+ Value to indicate nodata in output raster.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions
+ cycle_size : int
+ Maximum length of cycles to check for in d-infinity grids. (Note
+ that d-infinity routing can generate cycles that will cause
+ the accumulation algorithm to abort. These cycles are removed prior
+ to running the d-infinity accumulation algorithm.)
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ --------
+ acc : Raster
+ Raster indicating the (weighted) accumulation at each cell.
+ """
+ if routing.lower() == 'd8':
+ fdir_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ elif routing.lower() == 'dinf':
+ fdir_overrides = {'dtype' : np.float64, 'nodata' : fdir.nodata}
+ else:
+ raise ValueError('Routing method must be one of: `d8`, `dinf`')
+ kwargs.update(fdir_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ if weights is not None:
+ weights_overrides = {'dtype' : np.float64, 'nodata' : weights.nodata}
+ kwargs.update(weights_overrides)
+ weights = self._input_handler(weights, **kwargs)
+ if efficiency is not None:
+ efficiency_overrides = {'dtype' : np.float64, 'nodata' : efficiency.nodata}
+ kwargs.update(efficiency_overrides)
+ efficiency = self._input_handler(efficiency, **kwargs)
+ if routing.lower() == 'd8':
+ acc = self._d8_accumulation(fdir, weights=weights, dirmap=dirmap,
+ nodata_out=nodata_out,
+ efficiency=efficiency)
+ elif routing.lower() == 'dinf':
+ acc = self._dinf_accumulation(fdir, weights=weights, dirmap=dirmap,
+ nodata_out=nodata_out,
+ efficiency=efficiency,
+ cycle_size=cycle_size)
+ return acc
+
+ def _d8_accumulation(self, fdir, weights=None, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=0., efficiency=None, **kwargs):
+ # Find nodata cells and invalid cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ invalid_cells = ~np.in1d(fdir.ravel(), dirmap).reshape(fdir.shape)
+ # Set nodata cells to zero
+ fdir[nodata_cells] = 0
+ fdir[invalid_cells] = 0
+ # Start and end nodes
+ startnodes = np.arange(fdir.size, dtype=np.int64)
+ endnodes = _self._flatten_fdir_numba(fdir, dirmap).reshape(fdir.shape)
+ # Initialize accumulation array to weights, if using weights
+ if weights is not None:
+ acc = weights.astype(np.float64).reshape(fdir.shape)
+ # Otherwise, initialize accumulation array to ones where valid cells exist
+ else:
+ acc = (~nodata_cells).astype(np.float64).reshape(fdir.shape)
+ acc = np.asarray(acc)
+ # If using efficiency, initialize array
+ if efficiency is not None:
+ eff = efficiency.astype(np.float64).reshape(fdir.shape)
+ eff = np.asarray(eff)
+ # Find indegree of all cells
+ indegree = np.bincount(endnodes.ravel(), minlength=fdir.size).astype(np.uint8)
+ # Set starting nodes to those with no predecessors
+ startnodes = startnodes[(indegree == 0)]
+ # Compute accumulation
+ if efficiency is None:
+ acc = _self._d8_accumulation_numba(acc, endnodes, indegree, startnodes)
+ else:
+ acc = _self._d8_accumulation_eff_numba(acc, endnodes, indegree, startnodes, eff)
+ acc = self._output_handler(data=acc, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return acc
+
+ def _dinf_accumulation(self, fdir, weights=None, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=0., efficiency=None, cycle_size=1, **kwargs):
+ # Find nodata cells and invalid cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ # Split d-infinity grid
+ fdir_0, fdir_1, prop_0, prop_1 = _self._angle_to_d8_numba(fdir, dirmap, nodata_cells)
+ # Get matching of start and end nodes
+ startnodes = np.arange(fdir.size, dtype=np.int64)
+ endnodes_0 = _self._flatten_fdir_numba(fdir_0, dirmap).reshape(fdir.shape)
+ endnodes_1 = _self._flatten_fdir_numba(fdir_1, dirmap).reshape(fdir.shape)
+ # Remove cycles
+ _self._dinf_fix_cycles_numba(endnodes_0, endnodes_1, cycle_size)
+ # Initialize accumulation array to weights, if using weights
+ if weights is not None:
+ acc = weights.reshape(fdir.shape).astype(np.float64)
+ # Otherwise, initialize accumulation array to ones where valid cells exist
+ else:
+ acc = (~nodata_cells).reshape(fdir.shape).astype(np.float64)
+ acc = np.asarray(acc)
+ if efficiency is not None:
+ eff = efficiency.reshape(fdir.shape).astype(np.float64)
+ eff = np.asarray(eff)
+ # Find indegree of all cells
+ indegree_0 = np.bincount(endnodes_0.ravel(), minlength=fdir.size)
+ indegree_1 = np.bincount(endnodes_1.ravel(), minlength=fdir.size)
+ indegree = (indegree_0 + indegree_1).astype(np.uint8)
+ # Set starting nodes to those with no predecessors
+ startnodes = startnodes[(indegree == 0)]
+ # Compute accumulation
+ if efficiency is None:
+ acc = _self._dinf_accumulation_numba(acc, endnodes_0, endnodes_1, indegree,
+ startnodes, prop_0, prop_1)
+ else:
+ acc = _self._dinf_accumulation_eff_numba(acc, endnodes_0, endnodes_1, indegree,
+ startnodes, prop_0, prop_1, eff)
+ acc = self._output_handler(data=acc, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return acc
+
+ def distance_to_outlet(self, x, y, fdir, weights=None, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=np.nan, routing='d8', method='shortest',
+ xytype='coordinate', snap='corner', **kwargs):
+ """
+ Generates a raster representing the (weighted) topological distance from each cell
+ to the outlet, moving downstream.
+
+ Parameters
+ ----------
+ x : float or int
+ x coordinate (or index) of pour point
+ y : float or int
+ y coordinate (or index) of pour point
+ fdir : Raster
+ Flow direction data.
+ weights: Raster
+ Weights (distances) to apply to link edges. Defaults to the vector of
+ all ones.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions
+ xytype : 'coordinate' or 'index'
+ How to interpret parameters 'x' and 'y'.
+ 'coordinate' : x and y represent geographic coordinates
+ (will be passed to self.nearest_cell).
+ 'index' : x and y represent the column and row
+ indices of the pour point.
+ method : str
+ Method to use for distance calculation when multiple paths exist.
+ Currently, only shortest path distance is supported.
+ snap : str
+ Function to use on array for indexing:
+ 'corner' : numpy.around()
+ 'center' : numpy.floor()
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ --------
+ dist : Raster
+ Raster indicating the (possibly weighted) distance from each cell to the outlet.
+ """
+ if routing.lower() == 'd8':
+ input_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ elif routing.lower() == 'dinf':
+ input_overrides = {'dtype' : np.float64, 'nodata' : fdir.nodata}
+ else:
+ raise ValueError('Routing method must be one of: `d8`, `dinf`')
+ kwargs.update(input_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ if weights is not None:
+ weights_overrides = {'dtype' : np.float64, 'nodata' : weights.nodata}
+ kwargs.update(weights_overrides)
+ weights = self._input_handler(weights, **kwargs)
+ xmin, ymin, xmax, ymax = fdir.bbox
+ if xytype in {'label', 'coordinate'}:
+ if (x < xmin) or (x > xmax) or (y < ymin) or (y > ymax):
+ raise ValueError('Pour point ({}, {}) is out of bounds for dataset with bbox {}.'
+ .format(x, y, (xmin, ymin, xmax, ymax)))
+ elif xytype == 'index':
+ if (x < 0) or (y < 0) or (x >= fdir.shape[1]) or (y >= fdir.shape[0]):
+ raise ValueError('Pour point ({}, {}) is out of bounds for dataset with shape {}.'
+ .format(x, y, fdir.shape))
+ if routing.lower() == 'd8':
+ dist = self._d8_flow_distance(x=x, y=y, fdir=fdir, weights=weights,
+ dirmap=dirmap, nodata_out=nodata_out,
+ method=method, xytype=xytype,
+ snap=snap)
+ elif routing.lower() == 'dinf':
+ dist = self._dinf_flow_distance(x=x, y=y, fdir=fdir, weights=weights,
+ dirmap=dirmap, nodata_out=nodata_out,
+ method=method, xytype=xytype,
+ snap=snap)
+ return dist
+
+ def _d8_flow_distance(self, x, y, fdir, weights=None,
+ dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=np.nan, method='shortest',
+ xytype='coordinate', snap='corner', **kwargs):
+ # Find nodata cells and invalid cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ invalid_cells = ~np.in1d(fdir.ravel(), dirmap).reshape(fdir.shape)
+ # Set nodata cells to zero
+ fdir[nodata_cells] = 0
+ fdir[invalid_cells] = 0
+ if xytype in {'label', 'coordinate'}:
+ x, y = self.nearest_cell(x, y, fdir.affine, snap)
+ if weights is None:
+ weights = (~nodata_cells).reshape(fdir.shape).astype(np.float64)
+ dist = _self._d8_flow_distance_numba(fdir, weights, (y, x), dirmap)
+ dist = self._output_handler(data=dist, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return dist
+
+ def _dinf_flow_distance(self, x, y, fdir, weights=None,
+ dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=np.nan, method='shortest',
+ xytype='coordinate', snap='corner', **kwargs):
+ # Find nodata cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ # Split d-infinity grid
+ fdir_0, fdir_1, prop_0, prop_1 = _self._angle_to_d8_numba(fdir, dirmap, nodata_cells)
+ if xytype in {'label', 'coordinate'}:
+ x, y = self.nearest_cell(x, y, fdir.affine, snap)
+ if weights is not None:
+ weights_0 = weights
+ weights_1 = weights
+ else:
+ weights_0 = (~nodata_cells).reshape(fdir.shape).astype(np.float64)
+ weights_1 = weights_0
+ if method.lower() == 'shortest':
+ dist = _self._dinf_flow_distance_numba(fdir_0, fdir_1, weights_0,
+ weights_1, (y, x), dirmap)
+ else:
+ raise NotImplementedError("Only implemented for shortest path distance.")
+ # Prepare output
+ dist = self._output_handler(data=dist, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return dist
+
+ def compute_hand(self, fdir, dem, mask, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=None, routing='d8', return_index=False, **kwargs):
+ """
+ Computes the height above nearest drainage (HAND), based on a flow direction grid,
+ a digital elevation grid, and a grid containing the locations of drainage channels.
+
+ Parameters
+ ----------
+ fdir : Raster
+ Flow direction data.
+ dem : Raster
+ Digital elevation data.
+ mask : Raster
+ Boolean raster with nonzero elements indicating
+ locations of drainage channels.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions (not implemented)
+ return_index : bool
+ Boolean value indicating desired output.
+ - If True, return a Raster where each cell indicates the index
+ of the (topologically) nearest channel cell.
+ - If False, return a Raster where each cell indicates the elevation
+ above the (topologically) nearest channel cell.
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ hand : Raster
+ Raster indicating either the index of the nearest channel cell, or the height
+ above nearest drainage, depending on the value of the `return_index` parameter.
+ """
+ if routing.lower() == 'd8':
+ fdir_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ elif routing.lower() == 'dinf':
+ fdir_overrides = {'dtype' : np.float64, 'nodata' : fdir.nodata}
+ else:
+ raise ValueError('Routing method must be one of: `d8`, `dinf`')
+ dem_overrides = {'dtype' : np.float64, 'nodata' : dem.nodata}
+ mask_overrides = {'dtype' : np.bool8, 'nodata' : False}
+ kwargs.update(fdir_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ kwargs.update(dem_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ kwargs.update(mask_overrides)
+ mask = self._input_handler(mask, **kwargs)
+ # Set default nodata for hand index and hand
+ if nodata_out is None:
+ if return_index:
+ nodata_out = -1
+ else:
+ nodata_out = np.nan
+ # Compute height above nearest drainage
+ if routing.lower() == 'd8':
+ hand = self._d8_compute_hand(fdir=fdir, mask=mask,
+ dirmap=dirmap, nodata_out=nodata_out)
+ elif routing.lower() == 'dinf':
+ hand = self._dinf_compute_hand(fdir=fdir, mask=mask,
+ nodata_out=nodata_out)
+ # If index is not desired, return heights
+ if not return_index:
+ hand = _self._assign_hand_heights_numba(hand, dem, nodata_out)
+ hand = self._output_handler(data=hand, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return hand
+
+ def _d8_compute_hand(self, fdir, mask, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=-1):
+ # Find nodata cells and invalid cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ invalid_cells = ~np.in1d(fdir.ravel(), dirmap).reshape(fdir.shape)
+ # Set nodata cells to zero
+ fdir[nodata_cells] = 0
+ fdir[invalid_cells] = 0
+ dirleft, dirright, dirtop, dirbottom = self._pop_rim(fdir, nodata=0)
+ maskleft, maskright, masktop, maskbottom = self._pop_rim(mask, nodata=False)
+ hand = _self._d8_hand_iter_numba(fdir, mask, dirmap)
+ hand = self._output_handler(data=hand, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=-1)
+ return hand
+
+ def _dinf_compute_hand(self, fdir, mask, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=-1):
+ # Get nodata cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ # Split dinf flowdir
+ fdir_0, fdir_1, prop_0, prop_1 = _self._angle_to_d8_numba(fdir, dirmap, nodata_cells)
+ # Pad the rim
+ dirleft_0, dirright_0, dirtop_0, dirbottom_0 = self._pop_rim(fdir_0,
+ nodata=0)
+ dirleft_1, dirright_1, dirtop_1, dirbottom_1 = self._pop_rim(fdir_1,
+ nodata=0)
+ maskleft, maskright, masktop, maskbottom = self._pop_rim(mask, nodata=False)
+ hand = _self._dinf_hand_iter_numba(fdir_0, fdir_1, mask, dirmap)
+ hand = self._output_handler(data=hand, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=-1)
+ return hand
+
+ def extract_river_network(self, fdir, mask, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ routing='d8', **kwargs):
+ """
+ Generates river segments from accumulation and flow_direction arrays.
+
+ Parameters
+ ----------
+ fdir : Raster
+ Flow direction data.
+ mask : Raster
+ Boolean raster indicating channelized regions
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ geo : geojson.FeatureCollection
+ A geojson feature collection of river segments. Each array contains the cell
+ indices of junctions in the segment.
+ """
+ if routing.lower() == 'd8':
+ fdir_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ else:
+ raise NotImplementedError('Only implemented for D8 routing.')
+ mask_overrides = {'dtype' : np.bool8, 'nodata' : False}
+ kwargs.update(fdir_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ kwargs.update(mask_overrides)
+ mask = self._input_handler(mask, **kwargs)
+ # Find nodata cells and invalid cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ invalid_cells = ~np.in1d(fdir.ravel(), dirmap).reshape(fdir.shape)
+ # Set nodata cells to zero
+ fdir[nodata_cells] = 0
+ fdir[invalid_cells] = 0
+ maskleft, maskright, masktop, maskbottom = self._pop_rim(mask, nodata=False)
+ masked_fdir = np.where(mask, fdir, 0).astype(np.int64)
+ startnodes = np.arange(fdir.size, dtype=np.int64)
+ endnodes = _self._flatten_fdir_numba(masked_fdir, dirmap).reshape(fdir.shape)
+ indegree = np.bincount(endnodes.ravel(), minlength=fdir.size).astype(np.uint8)
+ orig_indegree = np.copy(indegree)
+ startnodes = startnodes[(indegree == 0)]
+ profiles = _self._d8_stream_network_numba(endnodes, indegree, orig_indegree, startnodes)
+ # Fill geojson dict with profiles
+ featurelist = []
+ for index, profile in enumerate(profiles):
+ yi, xi = np.unravel_index(list(profile), fdir.shape)
+ x, y = View.affine_transform(self.affine, xi, yi)
+ line = geojson.LineString(np.column_stack([x, y]).tolist())
+ featurelist.append(geojson.Feature(geometry=line, id=index))
+ geo = geojson.FeatureCollection(featurelist)
+ return geo
+
+ def stream_order(self, fdir, mask, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=0, routing='d8', **kwargs):
+ """
+ Computes the Strahler stream order.
+
+ Parameters
+ ----------
+ fdir : Raster
+ Flow direction data.
+ mask : Raster
+ Boolean Raster indicating channelized regions
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_out : int or float
+ Value to indicate nodata in output Raster.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ order : Raster
+ Raster indicating Strahler stream order of each cell
+ """
+ if routing.lower() == 'd8':
+ fdir_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ else:
+ raise NotImplementedError('Only implemented for D8 routing.')
+ mask_overrides = {'dtype' : np.bool8, 'nodata' : False}
+ kwargs.update(fdir_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ kwargs.update(mask_overrides)
+ mask = self._input_handler(mask, **kwargs)
+ # Find nodata cells and invalid cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ invalid_cells = ~np.in1d(fdir.ravel(), dirmap).reshape(fdir.shape)
+ # Set nodata cells to zero
+ fdir[nodata_cells] = 0
+ fdir[invalid_cells] = 0
+ maskleft, maskright, masktop, maskbottom = self._pop_rim(mask, nodata=False)
+ masked_fdir = np.where(mask, fdir, 0).astype(np.int64)
+ startnodes = np.arange(fdir.size, dtype=np.int64)
+ endnodes = _self._flatten_fdir_numba(masked_fdir, dirmap).reshape(fdir.shape)
+ indegree = np.bincount(endnodes.ravel()).astype(np.uint8)
+ orig_indegree = np.copy(indegree)
+ startnodes = startnodes[(indegree == 0)]
+ min_order = np.full(fdir.shape, np.iinfo(np.int64).max, dtype=np.int64)
+ max_order = np.ones(fdir.shape, dtype=np.int64)
+ order = np.where(mask, 1, 0).astype(np.int64).reshape(fdir.shape)
+ order = _self._d8_streamorder_numba(min_order, max_order, order, endnodes,
+ indegree, orig_indegree, startnodes)
+ order = self._output_handler(data=order, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return order
+
+ def distance_to_ridge(self, fdir, mask, weights=None, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=0, routing='d8', **kwargs):
+ """
+ Generates a raster representing the (weighted) topological distance from each cell
+ to its originating drainage divide, moving upstream.
+
+ Parameters
+ ----------
+ fdir : Raster
+ Flow direction data.
+ mask : Raster
+ Boolean raster indicating channelized regions
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_out : int or float
+ Value to indicate nodata in output raster.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ rdist : Raster
+ Raster indicating the (weighted) distance from each cell to its furthest
+ upstream parent.
+ """
+ if routing.lower() == 'd8':
+ fdir_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ else:
+ raise NotImplementedError('Only implemented for D8 routing.')
+ mask_overrides = {'dtype' : np.bool8, 'nodata' : False}
+ kwargs.update(fdir_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ kwargs.update(mask_overrides)
+ mask = self._input_handler(mask, **kwargs)
+ if weights is not None:
+ weights_overrides = {'dtype' : np.float64, 'nodata' : weights.nodata}
+ kwargs.update(weights_overrides)
+ weights = self._input_handler(weights, **kwargs)
+ # Find nodata cells and invalid cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ invalid_cells = ~np.in1d(fdir.ravel(), dirmap).reshape(fdir.shape)
+ # Set nodata cells to zero
+ fdir[nodata_cells] = 0
+ fdir[invalid_cells] = 0
+ if weights is None:
+ weights = (~nodata_cells).reshape(fdir.shape).astype(np.float64)
+ maskleft, maskright, masktop, maskbottom = self._pop_rim(mask, nodata=0)
+ masked_fdir = np.where(mask, fdir, 0).astype(np.int64)
+ startnodes = np.arange(fdir.size, dtype=np.int64)
+ endnodes = _self._flatten_fdir_numba(masked_fdir, dirmap).reshape(fdir.shape)
+ indegree = np.bincount(endnodes.ravel()).astype(np.uint8)
+ orig_indegree = np.copy(indegree)
+ startnodes = startnodes[(indegree == 0)]
+ min_order = np.full(fdir.shape, np.iinfo(np.int64).max, dtype=np.int64)
+ max_order = np.ones(fdir.shape, dtype=np.int64)
+ rdist = np.zeros(fdir.shape, dtype=np.float64)
+ rdist = _self._d8_reverse_distance_numba(min_order, max_order, rdist,
+ endnodes, indegree, startnodes, weights)
+ rdist = self._output_handler(data=rdist, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return rdist
+
+ def cell_dh(self, dem, fdir, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=np.nan, routing='d8', **kwargs):
+ """
+ Generates an array representing the elevation difference from each cell to its
+ downstream neighbor(s).
+
+ Parameters
+ ----------
+ dem : Raster
+ Digital elevation dataset.
+ fdir : Raster
+ Flow direction data.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_out : int or float
+ Value to indicate nodata in output raster.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions (not implemented)
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ dh : Raster
+ Raster indicating elevation drop from each cell to its downstream neighbor(s).
+ """
+ if routing.lower() == 'd8':
+ fdir_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ elif routing.lower() == 'dinf':
+ fdir_overrides = {'dtype' : np.float64, 'nodata' : fdir.nodata}
+ else:
+ raise ValueError('Routing method must be one of: `d8`, `dinf`')
+ dem_overrides = {'dtype' : np.float64, 'nodata' : dem.nodata}
+ kwargs.update(fdir_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ kwargs.update(dem_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ if routing.lower() == 'd8':
+ dh = self._d8_cell_dh(dem=dem, fdir=fdir, dirmap=dirmap,
+ nodata_out=nodata_out)
+ elif routing.lower() == 'dinf':
+ dh = self._dinf_cell_dh(dem=dem, fdir=fdir, dirmap=dirmap,
+ nodata_out=nodata_out)
+ return dh
+
+ def _d8_cell_dh(self, dem, fdir, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=np.nan):
+ # Find nodata cells and invalid cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ invalid_cells = ~np.in1d(fdir.ravel(), dirmap).reshape(fdir.shape)
+ # Set nodata cells to zero
+ fdir[nodata_cells] = 0
+ fdir[invalid_cells] = 0
+ dirleft, dirright, dirtop, dirbottom = self._pop_rim(fdir, nodata=0)
+ startnodes = np.arange(fdir.size, dtype=np.int64)
+ endnodes = _self._flatten_fdir_numba(fdir, dirmap).reshape(fdir.shape)
+ dh = _self._d8_cell_dh_numba(startnodes, endnodes, dem)
+ dh = self._output_handler(data=dh, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return dh
+
+ def _dinf_cell_dh(self, dem, fdir, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=np.nan):
+ # Get nodata cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ # Split dinf flowdir
+ fdir_0, fdir_1, prop_0, prop_1 = _self._angle_to_d8_numba(fdir, dirmap, nodata_cells)
+ # Pad the rim
+ dirleft_0, dirright_0, dirtop_0, dirbottom_0 = self._pop_rim(fdir_0,
+ nodata=0)
+ dirleft_1, dirright_1, dirtop_1, dirbottom_1 = self._pop_rim(fdir_1,
+ nodata=0)
+ startnodes = np.arange(fdir.size, dtype=np.int64)
+ endnodes_0 = _self._flatten_fdir_numba(fdir_0, dirmap).reshape(fdir.shape)
+ endnodes_1 = _self._flatten_fdir_numba(fdir_1, dirmap).reshape(fdir.shape)
+ dh = _self._dinf_cell_dh_numba(startnodes, endnodes_0, endnodes_1, prop_0, prop_1, dem)
+ dh = self._output_handler(data=dh, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return dh
+
+ def cell_distances(self, fdir, dirmap=(64, 128, 1, 2, 4, 8, 16, 32), nodata_out=np.nan,
+ routing='d8', **kwargs):
+ """
+ Generates an array representing the distance from each cell to its downstream neighbor(s).
+
+ Parameters
+ ----------
+ fdir : Raster
+ Flow direction data.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_out : int or float
+ Value to indicate nodata in output raster.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions (not implemented)
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ cdist : Raster
+ Raster indicating the distance from each cell to its downstream neighbor(s).
+
+ """
+ if routing.lower() == 'd8':
+ fdir_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ elif routing.lower() == 'dinf':
+ fdir_overrides = {'dtype' : np.float64, 'nodata' : fdir.nodata}
+ else:
+ raise ValueError('Routing method must be one of: `d8`, `dinf`')
+ kwargs.update(fdir_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ if routing.lower() == 'd8':
+ cdist = self._d8_cell_distances(fdir=fdir, dirmap=dirmap,
+ nodata_out=nodata_out)
+ elif routing.lower() == 'dinf':
+ cdist = self._dinf_cell_distances(fdir=fdir, dirmap=dirmap,
+ nodata_out=nodata_out)
+ return cdist
+
+ def _d8_cell_distances(self, fdir, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=np.nan):
+ # Find nodata cells and invalid cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ invalid_cells = ~np.in1d(fdir.ravel(), dirmap).reshape(fdir.shape)
+ # Set nodata cells to zero
+ fdir[nodata_cells] = 0
+ fdir[invalid_cells] = 0
+ dx = abs(fdir.affine.a)
+ dy = abs(fdir.affine.e)
+ cdist = _self._d8_cell_distances_numba(fdir, dirmap, dx, dy)
+ cdist = self._output_handler(data=cdist, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return cdist
+
+ def _dinf_cell_distances(self, fdir, dirmap=(64, 128, 1, 2, 4, 8, 16, 32),
+ nodata_out=np.nan):
+ # Get nodata cells
+ nodata_cells = self._get_nodata_cells(fdir)
+ # Split dinf flowdir
+ fdir_0, fdir_1, prop_0, prop_1 = _self._angle_to_d8_numba(fdir, dirmap, nodata_cells)
+ # Pad the rim
+ dirleft_0, dirright_0, dirtop_0, dirbottom_0 = self._pop_rim(fdir_0,
+ nodata=0)
+ dirleft_1, dirright_1, dirtop_1, dirbottom_1 = self._pop_rim(fdir_1,
+ nodata=0)
+ dx = abs(fdir.affine.a)
+ dy = abs(fdir.affine.e)
+ cdist = _self._dinf_cell_distances_numba(fdir_0, fdir_1, prop_0, prop_1,
+ dirmap, dx, dy)
+ cdist = self._output_handler(data=cdist, viewfinder=fdir.viewfinder,
+ metadata=fdir.metadata, nodata=nodata_out)
+ return cdist
+
+ def cell_slopes(self, dem, fdir, dirmap=(64, 128, 1, 2, 4, 8, 16, 32), nodata_out=np.nan,
+ routing='d8', **kwargs):
+ """
+ Generates an array representing the slope between each cell and
+ its downstream neighbor(s).
+
+ Parameters
+ ----------
+ dem : Raster
+ Digital elevation data.
+ fdir : Raster
+ Flow direction data.
+ dirmap : list or tuple (length 8)
+ List of integer values representing the following
+ cardinal and intercardinal directions (in order):
+ [N, NE, E, SE, S, SW, W, NW]
+ nodata_out : int or float
+ Value to indicate nodata in output raster.
+ routing : str
+ Routing algorithm to use:
+ 'd8' : D8 flow directions
+ 'dinf' : D-infinity flow directions (not implemented)
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ slopes : Raster
+ Raster indicating the slope between each cell and
+ its downstream neighbor(s).
+ """
+ if routing.lower() == 'd8':
+ fdir_overrides = {'dtype' : np.int64, 'nodata' : fdir.nodata}
+ elif routing.lower() == 'dinf':
+ fdir_overrides = {'dtype' : np.float64, 'nodata' : fdir.nodata}
+ else:
+ raise ValueError('Routing method must be one of: `d8`, `dinf`')
+ dem_overrides = {'dtype' : np.float64, 'nodata' : dem.nodata}
+ kwargs.update(fdir_overrides)
+ fdir = self._input_handler(fdir, **kwargs)
+ kwargs.update(dem_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ dh = self.cell_dh(dem, fdir, dirmap=dirmap, nodata_out=np.nan,
+ routing=routing, **kwargs)
+ cdist = self.cell_distances(fdir, dirmap=dirmap, nodata_out=np.nan,
+ routing=routing, **kwargs)
+ slopes = _self._cell_slopes_numba(dh, cdist)
+ slopes = self._output_handler(data=slopes, viewfinder=dem.viewfinder,
+ metadata=dem.metadata, nodata=nodata_out)
+ return slopes
+
+ def detect_pits(self, dem, **kwargs):
+ """
+ Detect single-celled pits in a digital elevation model.
+
+ Parameters
+ ----------
+ dem : Raster
+ Digital elevation data.
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ pits : Raster
+ Boolean Raster indicating locations of pits.
+ """
+ input_overrides = {'dtype' : np.float64, 'nodata' : dem.nodata}
+ kwargs.update(input_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ # Find no data cells
+ nodata_cells = self._get_nodata_cells(dem)
+ # Make sure nothing flows to the nodata cells
+ dem[nodata_cells] = dem.max() + 1
+ # Get indices of inner cells
+ inside = np.arange(dem.size, dtype=np.int64).reshape(dem.shape)[1:-1, 1:-1].ravel()
+ # Find pits
+ pits = _self._find_pits_numba(dem, inside)
+ pits = self._output_handler(data=pits, viewfinder=dem.viewfinder,
+ metadata=dem.metadata, nodata=False)
+ return pits
+
+ def fill_pits(self, dem, nodata_out=None, **kwargs):
+ """
+ Fill single-celled pits in a digital elevation model. Raises pits to same elevation
+ as lowest neighbor.
+
+ Parameters
+ ----------
+ dem : Raster
+ Digital elevation data.
+ nodata_out : int or float
+ Value indicating no data in output raster.
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ pit_filled_dem : Raster
+ Raster of digital elevation data with pits removed.
+ """
+ input_overrides = {'dtype' : np.float64, 'nodata' : dem.nodata}
+ kwargs.update(input_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ # Find no data cells
+ nodata_cells = self._get_nodata_cells(dem)
+ # Make sure nothing flows to the nodata cells
+ dem[nodata_cells] = dem.max() + 1
+ # Get indices of inner cells
+ inside = np.arange(dem.size, dtype=np.int64).reshape(dem.shape)[1:-1, 1:-1].ravel()
+ # Find pits in input DEM
+ pits = _self._find_pits_numba(dem, inside)
+ pit_indices = np.flatnonzero(pits).astype(np.int64)
+ # Create new array to hold pit-filled dem
+ pit_filled_dem = dem.copy().astype(np.float64)
+ # Fill pits
+ pit_filled_dem = _self._fill_pits_numba(pit_filled_dem, pit_indices)
+ # Set output nodata value
+ if nodata_out is None:
+ nodata_out = dem.nodata
+ # Ensure nodata cells propagate to pit-filled dem
+ pit_filled_dem[nodata_cells] = nodata_out
+ pit_filled_dem = self._output_handler(data=pit_filled_dem,
+ viewfinder=dem.viewfinder,
+ metadata=dem.metadata)
+ return pit_filled_dem
+
+ def detect_depressions(self, dem, **kwargs):
+ """
+ Detect multi-celled depressions in a DEM.
+
+ Parameters
+ ----------
+ dem : Raster
+ Digital elevation data
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ depressions : Raster
+ Boolean Raster indicating locations of depressions.
+ """
+ if not _HAS_SKIMAGE:
+ raise ImportError('detect_depressions requires skimage.morphology module')
+ input_overrides = {'dtype' : np.float64, 'nodata' : dem.nodata}
+ kwargs.update(input_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ filled_dem = self.fill_depressions(dem, **kwargs)
+ depressions = np.zeros(filled_dem.shape, dtype=np.bool8)
+ depressions[dem != filled_dem] = True
+ depressions[np.isnan(dem) | np.isnan(filled_dem)] = False
+ depressions = self._output_handler(data=depressions,
+ viewfinder=filled_dem.viewfinder,
+ metadata=filled_dem.metadata,
+ nodata=False)
+ return depressions
+
+ def fill_depressions(self, dem, nodata_out=np.nan, **kwargs):
+ """
+ Fill multi-celled depressions in a DEM. Raises depressions to same elevation
+ as lowest neighbor.
+
+ Parameters
+ ----------
+ dem : Raster
+ Digital elevation data
+ nodata_out : int or float
+ Value indicating no data in output raster.
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ flooded_dem : Raster
+ Raster representing digital elevation data with multi-celled
+ depressions removed.
+ """
+ if not _HAS_SKIMAGE:
+ raise ImportError('resolve_flats requires skimage.morphology module')
+ input_overrides = {'dtype' : np.float64, 'nodata' : dem.nodata}
+ kwargs.update(input_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ dem_mask = self._get_nodata_cells(dem)
+ dem_mask[0, :] = True
+ dem_mask[-1, :] = True
+ dem_mask[:, 0] = True
+ dem_mask[:, -1] = True
+ # Make sure nothing flows to the nodata cells
+ seed = np.copy(dem)
+ seed[~dem_mask] = np.nanmax(dem)
+ dem_out = skimage.morphology.reconstruction(seed, dem, method='erosion')
+ dem_out = self._output_handler(data=dem_out, viewfinder=dem.viewfinder,
+ metadata=dem.metadata, nodata=nodata_out)
+ return dem_out
+
+ def detect_flats(self, dem, **kwargs):
+ """
+ Detect flats in a digital elevation dataset.
+
+ Parameters
+ ----------
+ dem : Raster
+ Digital elevation data
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ flats : Raster
+ Boolean Raster indicating locations of flats.
+ """
+ input_overrides = {'dtype' : np.float64, 'nodata' : dem.nodata}
+ kwargs.update(input_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ # Find no data cells
+ nodata_cells = self._get_nodata_cells(dem)
+ # Make sure nothing flows to the nodata cells
+ dem[nodata_cells] = dem.max() + 1
+ # Get indices of inner cells
+ inside = np.arange(dem.size, dtype=np.int64).reshape(dem.shape)[1:-1, 1:-1].ravel()
+ # handle nodata values in dem
+ flats, _, _ = _self._par_get_candidates_numba(dem, inside)
+ flats = self._output_handler(data=flats, viewfinder=dem.viewfinder,
+ metadata=dem.metadata, nodata=False)
+ return flats
+
+ def resolve_flats(self, dem, nodata_out=None, eps=1e-5, max_iter=1000, **kwargs):
+ """
+ Resolve flats in a DEM using the modified method of Barnes et al. (2015).
+ See: https://arxiv.org/abs/1511.04433
+
+ Parameters
+ ----------
+ dem : Raster
+ Digital elevation dataset.
+ nodata_out : int or float
+ Value to indicate nodata in output array.
+ eps : float
+ Step size to use when inflating flats. The inflated output digital elevation
+ dataset will be equal to `dem + eps * drainage_gradient`, where the
+ `drainage_gradient` is defined in Barnes et al. (2015).
+ max_iter: int
+ Maximum number of iterations to use when computing the gradients from
+ higher and lower terrain, as defined in Barnes et al. (2015).
+
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ inflated_dem : Raster
+ Raster representing digital elevation data with flats removed.
+ """
+ input_overrides = {'dtype' : np.float64}
+ kwargs.update(input_overrides)
+ dem = self._input_handler(dem, **kwargs)
+ # Find no data cells
+ # TODO: Should these be used?
+ nodata_cells = self._get_nodata_cells(dem)
+ # Get inside indices
+ inside = np.arange(dem.size, dtype=np.int64).reshape(dem.shape)[1:-1, 1:-1].ravel()
+ # Find (i) cells in flats, (ii) cells with flow directions defined
+ # and (iii) cells with at least one higher neighbor
+ flats, fdirs_defined, higher_cells = _self._par_get_candidates_numba(dem, inside)
+ # Label all flats
+ labels, numlabels = skimage.measure.label(flats, return_num=True)
+ labels = labels.astype(np.int64)
+ # Get high-edge cells
+ hec = _self._par_get_high_edge_cells_numba(inside, fdirs_defined, higher_cells, labels)
+ # Get low-edge cells
+ lec = _self._par_get_low_edge_cells_numba(inside, dem, fdirs_defined, labels, numlabels)
+ # Construct gradient from higher terrain
+ grad_from_higher = _self._grad_from_higher_numba(hec, flats, labels, numlabels, max_iter)
+ # Construct gradient towards lower terrain
+ grad_towards_lower = _self._grad_towards_lower_numba(lec, flats, dem, max_iter)
+ # Construct a gradient that is guaranteed to drain
+ drainage_gradient = (2 * grad_towards_lower + grad_from_higher)
+ # Create a flat-removed DEM by applying drainage gradient
+ inflated_dem = np.asarray(dem + eps * drainage_gradient)
+ inflated_dem = self._output_handler(data=inflated_dem,
+ viewfinder=dem.viewfinder,
+ metadata=dem.metadata)
+ return inflated_dem
+
+ def polygonize(self, data=None, mask=None, connectivity=4, transform=None, **kwargs):
+ """
+ Yield (polygon, value) for each set of adjacent pixels of the same value.
+ Wrapper around rasterio.features.shapes
+
+ From rasterio documentation:
+
+ Parameters
+ ----------
+ data : Raster
+ Data to polygonize. Defaults to `self.mask`.
+ mask : Raster or np.ndarray
+ Values of False or 0 will be excluded from feature generation.
+ connectivity : 4 or 8 (int)
+ Use 4 or 8 pixel connectivity.
+ transform : affine.Affine
+ Transformation from pixel coordinates of `image` to the
+ coordinate system of the input `shapes`.
+
+ Additional keyword arguments (**kwargs) are passed to `self.view`.
+
+ Returns
+ -------
+ shapes : generator
+ Iterable generator of polygons (see documentation for
+ rasterio.features.shapes)
+ """
+ if not _HAS_RASTERIO:
+ raise ImportError('Requires rasterio module')
+ if data is None:
+ data = Raster(self.mask.astype(np.uint8),
+ viewfinder=self.viewfinder)
+ data = self.view(data, affine=transform, mask=mask, **kwargs)
+ mask = data.mask
+ transform = data.affine
+ shapes = rasterio.features.shapes(data, mask=mask, connectivity=connectivity,
+ transform=transform)
+ return shapes
+
+ def rasterize(self, shapes, out_shape=None, fill=0, transform=None,
+ all_touched=False, default_value=1, dtype=None, mask=None,
+ crs=None):
+ """
+ Return an image array with input geometries burned in.
+ Wrapper around rasterio.features.rasterize
+
+ From rasterio documentation:
+
+ Parameters
+ ----------
+ shapes : iterable of (geometry, value) pairs or iterable over
+ geometries.
+ out_shape : tuple or list
+ Shape of output numpy ndarray.
+ fill : int or float, optional
+ Fill value for all areas not covered by input geometries.
+ transform : affine.Affine
+ Transformation from pixel coordinates of `image` to the
+ coordinate system of the input `shapes`.
+ all_touched : boolean, optional
+ If True, all pixels touched by geometries will be burned in. If
+ false, only pixels whose center is within the polygon or that
+ are selected by Bresenham's line algorithm will be burned in.
+ default_value : int or float, optional
+ Used as value for all geometries, if not provided in `shapes`.
+ dtype : numpy data type
+ Used as data type for results, if `out` is not provided.
+ mask : np.ndarray
+ Boolean mask indicating the mask of the resulting Raster.
+ crs : pyproj.Proj
+ Coordinate reference system of the desired Raster.
+
+ Additional keyword arguments (**kwargs) are passed to `self.view`.
+
+ Returns
+ -------
+ raster : Raster
+ Raster representing rasterized input geometries.
+ """
+ if not _HAS_RASTERIO:
+ raise ImportError('Requires rasterio module')
+ if out_shape is None:
+ out_shape = self.shape
+ if transform is None:
+ transform = self.affine
+ if mask is None:
+ mask = self.mask
+ if crs is None:
+ crs = self.crs
+ raster = rasterio.features.rasterize(shapes, out_shape=out_shape,
+ fill=fill, transform=transform,
+ all_touched=all_touched,
+ default_value=default_value,
+ dtype=dtype)
+ viewfinder = ViewFinder(affine=transform, shape=out_shape,
+ nodata=fill, mask=mask, crs=crs)
+ raster = Raster(raster, viewfinder=viewfinder)
+ return raster
+
+ def snap_to_mask(self, mask, xy, return_dist=False, **kwargs):
+ """
+ Snap a set of coordinates (given by `xy`) to the nearest nonzero cells in a
+ boolean raster (given by `mask`). (Note that the mask raster is first mapped to the
+ grid's ViewFinder using self.view).
+
+ Parameters
+ ----------
+ mask : Raster
+ A Raster dataset with nonzero elements indicating cells to match to (e.g:
+ a flow accumulation grid with ones indicating cells above a certain threshold).
+ xy : np.ndarray-like with shape (N, 2)
+ Points to match (example: gage location coordinates).
+ return_dist : If true, return the distances from xy to the nearest matched point in mask.
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ xy_new : np.ndarray with shape (N, 2)
+ Coordinates of nearest points where mask is nonzero.
+ dist : np.ndarray with shape (N,), (optional)
+ Distances from points in xy to xy_new
+ """
+ try:
+ assert isinstance(mask, Raster)
+ except:
+ raise TypeError('`mask` must be a Raster instance.')
+ mask_overrides = {'dtype' : np.bool8, 'nodata' : False}
+ kwargs.update(mask_overrides)
+ mask = self._input_handler(mask, **kwargs)
+ affine = mask.affine
+ return View.snap_to_mask(mask, xy, affine=affine,
+ return_dist=return_dist)
+
+ def _input_handler(self, data, **kwargs):
+ try:
+ assert (isinstance(data, Raster))
+ except:
+ raise TypeError('Data must be a Raster.')
+ dataset = self.view(data, data_view=data.viewfinder, target_view=self.viewfinder,
+ **kwargs)
+ return dataset
+
+ def _output_handler(self, data, viewfinder, metadata={}, **kwargs):
+ new_view = ViewFinder(**viewfinder.properties)
+ for param, value in kwargs.items():
+ if (value is not None) and (hasattr(new_view, param)):
+ setattr(new_view, param, value)
+ dataset = Raster(data, new_view, metadata=metadata)
+ return dataset
+
+ def _get_nodata_cells(self, data):
+ try:
+ assert (isinstance(data, Raster))
+ except:
+ raise TypeError('Data must be a Raster.')
+ nodata = data.nodata
+ if np.isnan(nodata):
+ nodata_cells = np.isnan(data).astype(np.bool8)
+ else:
+ nodata_cells = (data == nodata).astype(np.bool8)
+ return nodata_cells
+
+ def _pop_rim(self, data, nodata=0):
+ left, right, top, bottom = (data[:,0].copy(), data[:,-1].copy(),
+ data[0,:].copy(), data[-1,:].copy())
+ data[:,0] = nodata
+ data[:,-1] = nodata
+ data[0,:] = nodata
+ data[-1,:] = nodata
+ return left, right, top, bottom
+
+ def _replace_rim(self, data, left, right, top, bottom):
+ data[:,0] = left
+ data[:,-1] = right
+ data[0,:] = top
+ data[-1,:] = bottom
+ return None
diff --git a/pysheds/sview.py b/pysheds/sview.py
new file mode 100644
index 0000000..b21a737
--- /dev/null
+++ b/pysheds/sview.py
@@ -0,0 +1,859 @@
+import copy
+import numpy as np
+import pyproj
+from affine import Affine
+from distutils.version import LooseVersion
+try:
+ import scipy.spatial
+ _HAS_SCIPY = True
+except:
+ _HAS_SCIPY = False
+
+import pysheds._sview as _self
+
+_OLD_PYPROJ = LooseVersion(pyproj.__version__) < LooseVersion('2.2')
+_pyproj_init = '+init=epsg:4326' if _OLD_PYPROJ else 'epsg:4326'
+
+class Raster(np.ndarray):
+ """
+ Array-like data structure with a coordinate reference system. A Raster is instantiated
+ from an array-like object and a ViewFinder. Optional metadata may also be provided
+ as a keyword argument.
+
+ Attributes
+ ==========
+ viewfinder : Class containing all information about the coordinate system
+ of the Raster object. Includes the `affine`, `shape`, `crs`,
+ `nodata` and `mask` attributes.
+ affine : Affine transformation matrix (uses affine module).
+ shape : The shape of the raster (number of rows, number of columns).
+ crs : The coordinate reference system.
+ nodata : The value indicating `no data`.
+ mask : A boolean array used to mask raster cells; may be used to indicate
+ which cells lie inside a catchment.
+ metadata : A dictionary containing optional metadata about the Raster.
+ bbox : The bounding box of the raster (xmin, ymin, xmax, ymax).
+ extent : The extent of the raster (xmin, xmax, ymin, ymax).
+ size : The number of cells in the raster.
+ coords : An (N, 2) array indicating the coordinates of the top-left corner
+ of each cell in the Raster. Coordinates of cells are list in C order.
+ properties : A dict containing the names and values of the essential properties
+ that define the coordinate reference system, including `affine`,
+ `shape`, `mask`, `crs`, and `nodata`.
+ dy_dx : Tuple describing the cell size in the y and x directions.
+
+ Methods
+ =======
+ to_crs : Transforms the Raster to a new coordinate reference system defined
+ by a pyproj.Proj object.
+ """
+
+ def __new__(cls, input_array, viewfinder=None, metadata={}):
+ # Handle case where input is a Raster itself
+ if isinstance(input_array, Raster):
+ input_array, viewfinder, metadata = cls._handle_raster_input(input_array,
+ viewfinder,
+ metadata)
+ # Create a numpy array from the input
+ obj = np.asarray(input_array).view(cls)
+ # If no viewfinder provided, construct one congruent with the array shape
+ if viewfinder is None:
+ viewfinder = ViewFinder(shape=obj.shape)
+ # If a viewfinder is provided, ensure that it is a viewfinder...
+ else:
+ try:
+ assert(isinstance(viewfinder, ViewFinder))
+ except:
+ raise ValueError("Must initialize with a ViewFinder.")
+ # Ensure that viewfinder shape is correct...
+ try:
+ assert viewfinder.shape == obj.shape
+ except:
+ raise ValueError('Viewfinder and array shape must be the same.')
+ # Test typing of array
+ try:
+ assert not np.issubdtype(obj.dtype, np.object_)
+ assert not np.issubdtype(obj.dtype, np.flexible)
+ except:
+ raise TypeError('`object` and `flexible` dtypes not allowed.')
+ try:
+ assert np.min_scalar_type(viewfinder.nodata) <= obj.dtype
+ except:
+ raise TypeError('`nodata` value not representable in dtype of array.')
+ # Don't allow original viewfinder and metadata to be modified
+ viewfinder = viewfinder.copy()
+ metadata = metadata.copy()
+ # Set attributes of array
+ obj._viewfinder = viewfinder
+ obj.metadata = metadata
+ return obj
+
+ def __array_finalize__(self, obj):
+ if obj is None:
+ return
+ self._viewfinder = getattr(obj, 'viewfinder', None)
+ self.metadata = getattr(obj, 'metadata', None)
+
+ @classmethod
+ def _handle_raster_input(cls, input_array, viewfinder, metadata):
+ if not metadata:
+ metadata = input_array.metadata
+ # If no viewfinder provided, use viewfinder of input raster
+ if viewfinder is None:
+ viewfinder = input_array.viewfinder
+ # Otherwise, given viewfinder overrides and returns a view
+ else:
+ if viewfinder != input_array.viewfinder:
+ input_array = View.view(data=input_array,
+ target_view=viewfinder,
+ apply_input_mask=False,
+ apply_output_mask=False,
+ inherit_metadata=False,
+ new_metadata=metadata)
+ return input_array, viewfinder, metadata
+
+ @property
+ def viewfinder(self):
+ return self._viewfinder
+
+ @viewfinder.setter
+ def viewfinder(self, new_viewfinder):
+ try:
+ assert(isinstance(new_viewfinder, ViewFinder))
+ except:
+ raise ValueError("Must be a `ViewFinder` object")
+ try:
+ assert new_viewfinder.shape == self.shape
+ except:
+ raise ValueError('viewfinder and raster array must have the same shape.')
+ self._viewfinder = new_viewfinder
+
+ @property
+ def bbox(self):
+ return self.viewfinder.bbox
+
+ @property
+ def coords(self):
+ return self.viewfinder.coords
+
+ @property
+ def axes(self):
+ return self.viewfinder.axes
+
+ @property
+ def view_shape(self):
+ return self.viewfinder.shape
+
+ @property
+ def mask(self):
+ return self.viewfinder.mask
+
+ @property
+ def nodata(self):
+ return self.viewfinder.nodata
+
+ @nodata.setter
+ def nodata(self, new_nodata):
+ self.viewfinder.nodata = new_nodata
+
+ @property
+ def crs(self):
+ return self.viewfinder.crs
+
+ @property
+ def view_size(self):
+ return np.prod(self.viewfinder.shape)
+
+ @property
+ def extent(self):
+ bbox = self.viewfinder.bbox
+ extent = (bbox[0], bbox[2], bbox[1], bbox[3])
+ return extent
+
+ @property
+ def affine(self):
+ return self.viewfinder.affine
+
+ @property
+ def properties(self):
+ property_dict = {
+ 'affine' : self.viewfinder.affine,
+ 'shape' : self.viewfinder.shape,
+ 'crs' : self.viewfinder.crs,
+ 'nodata' : self.viewfinder.nodata,
+ 'mask' : self.viewfinder.mask
+ }
+ return property_dict
+
+ @property
+ def dy_dx(self):
+ return (abs(self.affine.e), abs(self.affine.a))
+
+ def to_crs(self, new_crs, **kwargs):
+ """
+ Transforms and resamples the Raster in a new coordinate reference system.
+ A new ViewFinder is generated such that all points in the old Raster are
+ contained within the new transformed Raster.
+
+ Parameters
+ ----------
+ new_crs : pyproj.Proj
+ New coordinate reference system.
+
+ Additional keyword arguments (**kwargs) are passed to View.view.
+
+ Returns
+ -------
+ new_raster : Raster
+ Raster transformed to the new coordinate reference system
+ """
+ old_crs = self.crs
+ dx = self.affine.a
+ dy = self.affine.e
+ m, n = self.shape
+ Y, X = np.mgrid[0:m, 0:n]
+ top = np.column_stack([X[0, :], Y[0, :]])
+ bottom = np.column_stack([X[-1, :], Y[-1, :]])
+ left = np.column_stack([X[:, 0], Y[:, 0]])
+ right = np.column_stack([X[:, -1], Y[:, -1]])
+ boundary = np.vstack([top, bottom, left, right])
+ xi, yi = boundary[:,0], boundary[:,1]
+ xb, yb = View.affine_transform(self.affine, xi, yi)
+ xb_p, yb_p = pyproj.transform(old_crs, new_crs, xb, yb,
+ errcheck=True, always_xy=True)
+ x0_p = xb_p.min() if (dx > 0) else xb_p.max()
+ y0_p = yb_p.min() if (dy > 0) else yb_p.max()
+ xn_p = xb_p.max() if (dx > 0) else xb_p.min()
+ yn_p = yb_p.max() if (dy > 0) else yb_p.min()
+ a = (xn_p - x0_p) / n
+ e = (yn_p - y0_p) / m
+ new_affine = Affine(a, 0., x0_p, 0., e, y0_p)
+ new_viewfinder = ViewFinder(affine=new_affine, shape=self.shape,
+ nodata=self.nodata, mask=self.mask,
+ crs=new_crs)
+ new_raster = View.view(self, target_view=new_viewfinder,
+ data_view=self.viewfinder, **kwargs)
+ return new_raster
+
+class ViewFinder():
+ """
+ Class that defines a spatial reference system for a Raster or Grid instance.
+ The spatial reference is completely defined by an affine transformation matrix (affine),
+ a desired shape (shape), a coordinate reference system (crs), a boolean mask (mask),
+ and a sentinel value indicating `no data` (nodata).
+
+ Attributes
+ ==========
+ affine : Affine transformation matrix (uses affine module).
+ shape : The shape of the raster (number of rows, number of columns).
+ crs : The coordinate reference system.
+ nodata : The value indicating `no data`.
+ mask : A boolean array used to mask raster cells; may be used to indicate
+ which cells lie inside a catchment.
+ bbox : The bounding box of the raster (xmin, ymin, xmax, ymax).
+ extent : The extent of the raster (xmin, xmax, ymin, ymax).
+ size : The number of cells in the raster.
+ coords : An (N, 2) array indicating the coordinates of the top-left corner
+ of each cell in the Raster. Coordinates of cells are list in C order.
+ axes : Tuple of arrays indicating the y and x axes (i.e. the coordinates of the
+ top-left corners of the leftmost and upper edges of the dataset, respectively).
+ properties : A dict containing the names and values of the essential properties
+ that define the coordinate reference system, including `affine`,
+ `shape`, `mask`, `crs`, and `nodata`.
+ dy_dx : Tuple describing the cell size in the y and x directions.
+ """
+ def __init__(self, affine=Affine(1., 0., 0., 0., 1., 0.), shape=(1,1),
+ nodata=0, mask=None, crs=pyproj.Proj(_pyproj_init)):
+ self.affine = affine
+ self.shape = shape
+ self.crs = crs
+ self.nodata = nodata
+ if mask is None:
+ self.mask = np.ones(shape, dtype=np.bool8)
+ else:
+ self.mask = mask
+
+ def __eq__(self, other):
+ if isinstance(other, ViewFinder):
+ is_eq = True
+ is_eq &= (self.affine == other.affine)
+ is_eq &= (self.shape[0] == other.shape[0])
+ is_eq &= (self.shape[1] == other.shape[1])
+ is_eq &= (self.crs == other.crs)
+ is_eq &= (self.mask == other.mask).all()
+ if np.isnan(self.nodata):
+ is_eq &= np.isnan(other.nodata)
+ else:
+ is_eq &= self.nodata == other.nodata
+ return is_eq
+ else:
+ return False
+
+ def __repr__(self):
+ repr_str = '\n'.join([repr(k) + ' : ' + repr(v)
+ for k, v in self.properties.items()])
+ return repr_str
+
+ @property
+ def affine(self):
+ return self._affine
+
+ @affine.setter
+ def affine(self, new_affine):
+ try:
+ assert(isinstance(new_affine, Affine))
+ except:
+ raise TypeError('Affine transformation must be an `Affine` object')
+ self._affine = new_affine
+
+ @property
+ def shape(self):
+ return self._shape
+
+ @shape.setter
+ def shape(self, new_shape):
+ try:
+ assert len(new_shape) == 2
+ assert isinstance(new_shape[0], int)
+ assert isinstance(new_shape[1], int)
+ except:
+ raise ValueError('`shape` must be an integer sequence of length 2.')
+ new_shape = tuple(new_shape)
+ self._shape = new_shape
+
+ @property
+ def mask(self):
+ return self._mask
+
+ @mask.setter
+ def mask(self, new_mask):
+ try:
+ assert (new_mask.shape == self.shape)
+ except:
+ raise ValueError('`mask` shape must be the same as `self.shape`')
+ try:
+ assert (np.min_scalar_type(new_mask) <= np.dtype(np.bool8))
+ except:
+ raise TypeError('`mask` must be of boolean type')
+ new_mask = new_mask.astype(np.bool8)
+ self._mask = new_mask
+
+ @property
+ def nodata(self):
+ return self._nodata
+
+ @nodata.setter
+ def nodata(self, new_nodata):
+ try:
+ assert not (np.min_scalar_type(new_nodata) == np.dtype('O'))
+ except:
+ raise TypeError('`nodata` value must be a numeric type.')
+ self._nodata = new_nodata
+
+ @property
+ def crs(self):
+ return self._crs
+
+ @crs.setter
+ def crs(self, new_crs):
+ try:
+ assert (isinstance(new_crs, pyproj.Proj))
+ except:
+ raise TypeError('`crs` must be a `pyproj.Proj` object.')
+ self._crs = new_crs
+
+ @property
+ def size(self):
+ return np.prod(self.shape)
+
+ @property
+ def bbox(self):
+ shape = self.shape
+ xmin, ymax = View.affine_transform(self.affine, 0, 0)
+ xmax, ymin = View.affine_transform(self.affine, shape[1], shape[0])
+ _bbox = (xmin, ymin, xmax, ymax)
+ return _bbox
+
+ @property
+ def extent(self):
+ bbox = self.bbox
+ extent = (bbox[0], bbox[2], bbox[1], bbox[3])
+ return extent
+
+ @property
+ def coords(self):
+ coordinates = np.meshgrid(*self.axes, indexing='ij')
+ return np.vstack(np.dstack(coordinates))
+
+ @property
+ def dy_dx(self):
+ return (-self.affine.e, self.affine.a)
+
+ @property
+ def properties(self):
+ property_dict = {
+ 'affine' : self.affine,
+ 'shape' : self.shape,
+ 'nodata' : self.nodata,
+ 'crs' : self.crs,
+ 'mask' : self.mask
+ }
+ return property_dict
+
+ @property
+ def axes(self):
+ return View.axes(self.affine, self.shape)
+
+ def is_congruent_with(self, other):
+ if isinstance(other, ViewFinder):
+ is_congruent = True
+ is_congruent &= (self.affine == other.affine)
+ is_congruent &= (self.shape[0] == other.shape[0])
+ is_congruent &= (self.shape[1] == other.shape[1])
+ is_congruent &= (self.crs == other.crs)
+ return is_congruent
+ else:
+ return False
+
+ def copy(self):
+ new_view = copy.deepcopy(self)
+ return new_view
+
+ def view(self, raster, **kwargs):
+ data_view = raster.viewfinder
+ target_view = self
+ return View.view(raster, data_view, target_view, **kwargs)
+
+class View():
+ """
+ Class containing methods for manipulating views of gridded datasets.
+
+ Methods
+ ==========
+ view : View a Raster in a different spatial reference system.
+ affine_transform : Apply an affine transformation to a point or set of points.
+ nearest_cell : Find the nearest cell to a set of x, y coordinates.
+ trim_zeros : Clip a raster to the bounding box defined by its non-null values.
+ clip_to_mask : Clip a raster to a pre-defined Raster mask.
+ """
+
+ def __init__(self):
+ raise NotImplementedError('The View class is used for classmethods '
+ 'and is not meant to be instantiated.')
+
+ @classmethod
+ def view(cls, data, target_view, data_view=None, interpolation='nearest',
+ apply_input_mask=False, apply_output_mask=True,
+ affine=None, shape=None, crs=None, mask=None, nodata=None,
+ dtype=None, inherit_metadata=True, new_metadata={}):
+ """
+ Return a copy of a gridded dataset `data` transformed to the spatial reference
+ system defined by `target_view`.
+
+ Parameters
+ ----------
+ data : Raster
+ A Raster object containing the gridded data and its spatial reference system
+ (as defined by its ViewFinder).
+ target_view : ViewFinder
+ The desired spatial reference system.
+ data_view : ViewFinder
+ The spatial reference system of the data. Defaults to the Raster dataset's
+ `viewfinder` attribute.
+ interpolation : 'nearest', 'linear'
+ Interpolation method to be used if spatial reference systems
+ are not congruent.
+ apply_input_mask : bool
+ If True, mask the input Raster according to data.mask.
+ apply_output_mask : bool
+ If True, mask the output Raster according to grid.mask.
+ affine : affine.Affine
+ Affine transformation matrix (overrides target_view.affine)
+ shape : tuple of ints (length 2)
+ Shape of desired Raster (overrides target_view.shape)
+ crs : pyproj.Proj
+ Coordinate reference system (overrides target_view.crs)
+ mask : np.ndarray or Raster
+ Boolean array to mask output (overrides target_view.mask)
+ nodata : int or float
+ Value indicating no data in output Raster (overrides target_view.nodata)
+ dtype : numpy datatype
+ Desired datatype of the output array.
+ inherit_metadata : bool
+ If True, output Raster inherits metadata from input data.
+ new_metadata : dict
+ Optional metadata to add to output Raster.
+
+ Returns
+ -------
+ out : Raster
+ View of the input Raster at the provided target view.
+ """
+ # If no data view given, use data's view
+ if data_view is None:
+ try:
+ assert(isinstance(data, Raster))
+ except:
+ raise TypeError('`data` must be a Raster instance.')
+ data_view = data.viewfinder
+ # Override parameters of target view if desired
+ target_view = cls._override_target_view(target_view,
+ affine=affine,
+ shape=shape,
+ crs=crs,
+ mask=mask,
+ nodata=nodata)
+ # Resolve dtype of output Raster
+ dtype = cls._override_dtype(data, target_view,
+ dtype=dtype,
+ interpolation=interpolation)
+ # Mask input data if desired
+ if apply_input_mask:
+ arr = np.where(data_view.mask, data, target_view.nodata).astype(dtype)
+ data = Raster(arr, data.viewfinder, metadata=data.metadata)
+ # If data view and target view are the same, return a copy of the data
+ if data_view.is_congruent_with(target_view):
+ out = cls._view_same_viewfinder(data, data_view, target_view, dtype,
+ apply_output_mask=apply_output_mask)
+ # If data view and target view are different...
+ else:
+ out = cls._view_different_viewfinder(data, data_view, target_view, dtype,
+ apply_output_mask=apply_output_mask,
+ interpolation=interpolation)
+ # Write metadata
+ if inherit_metadata:
+ out.metadata.update(data.metadata)
+ out.metadata.update(new_metadata)
+ return out
+
+ @classmethod
+ def affine_transform(cls, affine, x, y):
+ """
+ Basic affine transformation of a point (x, y) or set of points (x, y).
+
+ Parameters
+ ----------
+ affine : affine.Affine
+ An affine transformation.
+ x : float or np.ndarray
+ An x-coordinate or array of x-coordinates.
+ y : float or np.ndarray
+ A y-coordinate or array of y-coordinates.
+
+ Returns
+ -------
+ x_t, y_t : tuple
+ A set of transformed x and y coordinates
+ """
+ # Check affine input type
+ try:
+ assert isinstance(affine, Affine)
+ affine = tuple(affine)
+ except:
+ raise TypeError('`affine` must be an Affine instance')
+ # Vector case
+ if hasattr(x, '__len__'):
+ if hasattr(y, '__len__'):
+ x = np.asarray(x).astype(np.float64)
+ y = np.asarray(y).astype(np.float64)
+ x_t, y_t = _self._affine_map_vec_numba(affine, x, y)
+ else:
+ raise TypeError('If `x` is a sequence, `y` must also be a sequence')
+ # Scalar case
+ else:
+ x = float(x)
+ y = float(y)
+ x_t, y_t = _self._affine_map_scalar_numba(affine, x, y)
+ return x_t, y_t
+
+ @classmethod
+ def nearest_cell(cls, x, y, affine, snap='corner'):
+ """
+ Returns the index of the cell (column, row) closest
+ to a given geographical coordinate.
+
+ Parameters
+ ----------
+ x : int or float
+ x coordinate.
+ y : int or float
+ y coordinate.
+ affine : affine.Affine
+ Affine transformation that defines the translation between
+ geographic x/y coordinate and array row/column coordinate.
+ snap : str
+ Indicates the cell indexing method. If "corner", will resolve to
+ snapping the (x,y) geometry to the index of the nearest top-left
+ cell corner. If "center", will return the index of the cell that
+ the geometry falls within.
+
+ Returns
+ -------
+ col, row : tuple of ints
+ Column index and row index
+ """
+ try:
+ assert isinstance(affine, Affine)
+ except:
+ raise TypeError('affine must be an Affine instance.')
+ snap_dict = {'corner': np.around, 'center': np.floor}
+ xi, yi = cls.affine_transform(~affine, x, y)
+ col, row = snap_dict[snap]((xi, yi)).astype(int)
+ return col, row
+
+ @classmethod
+ def axes(cls, affine, shape):
+ """
+ Return row and column coordinates of axes, such that the cartesian product
+ of the two axis vectors uniquely addresses each grid cell.
+
+ Parameters
+ ----------
+ affine : affine.Affine
+ Affine transformation
+ shape : tuple of ints (length 2)
+ The shape of the 2D array (rows, columns).
+
+ Returns
+ -------
+ y, x : tuple
+ y- and x-coordinates of axes
+ """
+ y_ix = np.arange(shape[0])
+ x_ix = np.arange(shape[1])
+ x_null = np.zeros(shape[0])
+ y_null = np.zeros(shape[1])
+ x, _ = cls.affine_transform(affine, x_ix, y_null)
+ _, y = cls.affine_transform(affine, x_null, y_ix)
+ return y, x
+
+ @classmethod
+ def snap_to_mask(cls, mask, xy, affine=None, return_dist=False, **kwargs):
+ """
+ Snap a set of coordinates (given by `xy`) to the nearest nonzero cells in a
+ boolean raster (given by `mask`). (Note that the mask raster is first mapped to the
+ grid's ViewFinder using self.view).
+
+ Parameters
+ ----------
+ mask : Raster or np.ndarray
+ A Raster or array dataset with nonzero elements indicating cells to match to (e.g:
+ a flow accumulation grid with ones indicating cells above a certain threshold).
+ xy : np.ndarray-like with shape (N, 2)
+ Points to match (example: gage location coordinates).
+ affine : affine.Affine
+ Affine transformation. If None given, defaults to `mask.affine`
+ if mask is a Raster.
+ return_dist : If true, return the distances from xy to the nearest matched point in mask.
+
+ Additional keyword arguments (**kwargs) are passed to self.view.
+
+ Returns
+ -------
+ xy_new : np.ndarray with shape (N, 2)
+ Coordinates of nearest points where mask is nonzero.
+ dist : np.ndarray with shape (N,), (optional)
+ Distances from points in xy to xy_new
+ """
+ if not _HAS_SCIPY:
+ raise ImportError('Requires scipy.spatial module')
+ if affine is None:
+ try:
+ assert isinstance(mask, Raster)
+ except:
+ raise TypeError('If no affine transform given, mask must be a raster')
+ affine = mask.affine
+ yi, xi = np.where(mask)
+ x, y = cls.affine_transform(affine, xi, yi)
+ tree_xy = np.column_stack([x, y])
+ tree = scipy.spatial.cKDTree(tree_xy)
+ dist, ix = tree.query(xy)
+ if return_dist:
+ return tree_xy[ix], dist
+ else:
+ return tree_xy[ix]
+
+ @classmethod
+ def trim_zeros(cls, data, pad=(0,0,0,0)):
+ """
+ Clip a Raster to the smallest area that contains all non-null data.
+
+ Parameters
+ ----------
+ data : Raster
+ A Raster dataset.
+ pad : tuple of int (length 4)
+ Apply padding to edges of new view (left, bottom, right, top). A pad of
+ (1,1,1,1), for instance, will add a one-cell rim around the new view.
+
+ Returns
+ -------
+ out : Raster
+ A Raster dataset clipped to the bounding box of its non-null values.
+ """
+ try:
+ for value in pad:
+ assert (isinstance(value, int))
+ assert (value >= 0)
+ except:
+ raise ValueError('Pad values must be non-negative integers')
+ try:
+ assert isinstance(data, Raster)
+ except:
+ raise TypeError('`data` must be a Raster instance.')
+ if np.isnan(data.nodata):
+ mask = (~np.isnan(data))
+ else:
+ mask = (data != data.nodata)
+ return cls.clip_to_mask(data, mask=mask, pad=pad)
+
+ @classmethod
+ def clip_to_mask(cls, data, mask=None, pad=(0,0,0,0)):
+ """
+ Clip a Raster to the smallest area that contains all nonzero entries for a
+ given boolean mask.
+
+ Parameters
+ ----------
+ data : Raster
+ A Raster dataset.
+ mask : Raster
+ A Raster dataset representing a boolean mask. Defaults to data.mask.
+ pad : tuple of int (length 4)
+ Apply padding to edges of new view (left, bottom, right, top). A pad of
+ (1,1,1,1), for instance, will add a one-cell rim around the new view.
+
+ Returns
+ -------
+ out : Raster
+ A Raster dataset clipped to the bounding box of the non-null entries
+ in the given mask.
+ """
+ try:
+ for value in pad:
+ assert (isinstance(value, int))
+ assert (value >= 0)
+ except:
+ raise ValueError('Pad values must be non-negative integers')
+ try:
+ assert isinstance(data, Raster)
+ except:
+ raise TypeError('`data` must be a Raster instance.')
+ if mask is None:
+ mask = data.mask
+ else:
+ try:
+ assert (data.shape == mask.shape)
+ except:
+ raise ValueError('Shape of `data` and `mask` must be the same')
+ vert_pad = (pad[3], pad[1])
+ horiz_pad = (pad[0], pad[2])
+ nz_r, nz_c = np.nonzero(mask)
+ yi_min = nz_r.min()
+ yi_max = nz_r.max()
+ xi_min = nz_c.min()
+ xi_max = nz_c.max()
+ xul, yul = View.affine_transform(data.affine,
+ xi_min - pad[0],
+ yi_min - pad[3])
+ new_affine = Affine(data.affine.a, data.affine.b, xul,
+ data.affine.d, data.affine.e, yul)
+ out = data[yi_min:yi_max + 1, xi_min:xi_max + 1]
+ out = np.pad(out, (vert_pad, horiz_pad),
+ mode='constant', constant_values=data.nodata)
+ out_mask = mask[yi_min:yi_max + 1, xi_min:xi_max + 1]
+ out_mask = np.pad(out_mask, (vert_pad, horiz_pad),
+ mode='constant', constant_values=False)
+ new_viewfinder = ViewFinder(affine=new_affine, shape=out.shape,
+ nodata=data.nodata, crs=data.crs,
+ mask=out_mask)
+ out = Raster(out, viewfinder=new_viewfinder, metadata=data.metadata)
+ return out
+
+ @classmethod
+ def _override_target_view(cls, target_view, **kwargs):
+ new_view = ViewFinder(**target_view.properties)
+ for param, value in kwargs.items():
+ if (value is not None) and (hasattr(new_view, param)):
+ setattr(new_view, param, value)
+ return new_view
+
+ @classmethod
+ def _override_dtype(cls, data, target_view, dtype=None, interpolation='nearest'):
+ if dtype is not None:
+ return dtype
+ if interpolation == 'nearest':
+ # Find minimum type needed to represent nodata
+ dtype = max(np.min_scalar_type(target_view.nodata), data.dtype)
+ # For matplotlib imshow compatibility, upcast floats to float32
+ if issubclass(dtype.type, np.floating):
+ dtype = max(dtype, np.dtype(np.float32))
+ elif interpolation == 'linear':
+ dtype = np.float64
+ else:
+ raise ValueError('Interpolation method must be one of: `nearest`, `linear`')
+ try:
+ assert not np.issubdtype(dtype, np.object_)
+ assert not np.issubdtype(dtype, np.flexible)
+ except:
+ raise TypeError('`object` and `flexible` dtypes not allowed.')
+ return dtype
+
+ @classmethod
+ def _view_same_viewfinder(cls, data, data_view, target_view, dtype,
+ apply_output_mask=True):
+ if apply_output_mask:
+ out = np.where(target_view.mask, data, target_view.nodata).astype(dtype)
+ else:
+ out = np.asarray(data.copy(), dtype=dtype)
+ out = Raster(out, target_view)
+ return out
+
+ @classmethod
+ def _view_different_viewfinder(cls, data, data_view, target_view, dtype,
+ apply_output_mask=True, interpolation='nearest'):
+ out = np.full(target_view.shape, target_view.nodata, dtype=dtype)
+ if (data_view.crs == target_view.crs):
+ out = cls._view_same_crs(out, data, data_view,
+ target_view, interpolation)
+ else:
+ out = cls._view_different_crs(out, data, data_view,
+ target_view, interpolation)
+ if apply_output_mask:
+ np.place(out, ~target_view.mask, target_view.nodata)
+ out = Raster(out, target_view)
+ return out
+
+ @classmethod
+ def _view_same_crs(cls, view, data, data_view, target_view, interpolation='nearest'):
+ y, x = target_view.axes
+ inv_affine = ~data_view.affine
+ _, y_ix = cls.affine_transform(inv_affine,
+ np.zeros(target_view.shape[0],
+ dtype=np.float64), y)
+ x_ix, _ = cls.affine_transform(inv_affine, x,
+ np.zeros(target_view.shape[1],
+ dtype=np.float64))
+ if interpolation == 'nearest':
+ view = _self._view_fill_by_axes_nearest_numba(data, view, y_ix, x_ix)
+ elif interpolation == 'linear':
+ view = _self._view_fill_by_axes_linear_numba(data, view, y_ix, x_ix)
+ else:
+ raise ValueError('Interpolation method must be one of: `nearest`, `linear`')
+ return view
+
+ @classmethod
+ def _view_different_crs(cls, view, data, data_view, target_view, interpolation='nearest'):
+ y, x = target_view.coords.T
+ xt, yt = pyproj.transform(target_view.crs, data_view.crs, x=x, y=y,
+ errcheck=True, always_xy=True)
+ inv_affine = ~data_view.affine
+ x_ix, y_ix = cls.affine_transform(inv_affine, xt, yt)
+ if interpolation == 'nearest':
+ view = _self._view_fill_by_entries_nearest_numba(data, view, y_ix, x_ix)
+ elif interpolation == 'linear':
+ view = _self._view_fill_by_entries_linear_numba(data, view, y_ix, x_ix)
+ else:
+ raise ValueError('Interpolation method must be one of: `nearest`, `linear`')
+ return view
+
diff --git a/pysheds/view.py b/pysheds/view.py
index eff67fb..05c455b 100644
--- a/pysheds/view.py
+++ b/pysheds/view.py
@@ -1,461 +1,10 @@
-import numpy as np
-from scipy import spatial
-from scipy import interpolate
-import pyproj
-from affine import Affine
-from distutils.version import LooseVersion
-
-_OLD_PYPROJ = LooseVersion(pyproj.__version__) < LooseVersion('2.2')
-_pyproj_init = '+init=epsg:4326' if _OLD_PYPROJ else 'epsg:4326'
-
-class Raster(np.ndarray):
- def __new__(cls, input_array, viewfinder, metadata=None):
- obj = np.asarray(input_array).view(cls)
- try:
- assert(issubclass(type(viewfinder), BaseViewFinder))
- except:
- raise ValueError("Must initialize with a ViewFinder")
- obj.viewfinder = viewfinder
- obj.metadata = metadata
- return obj
-
- def __array_finalize__(self, obj):
- if obj is None:
- return
- self.viewfinder = getattr(obj, 'viewfinder', None)
- self.metadata = getattr(obj, 'metadata', None)
-
- @property
- def bbox(self):
- return self.viewfinder.bbox
- @property
- def coords(self):
- return self.viewfinder.coords
- @property
- def view_shape(self):
- return self.viewfinder.shape
- @property
- def mask(self):
- return self.viewfinder.mask
- @property
- def nodata(self):
- return self.viewfinder.nodata
- @nodata.setter
- def nodata(self, new_nodata):
- self.viewfinder.nodata = new_nodata
- @property
- def crs(self):
- return self.viewfinder.crs
- @property
- def view_size(self):
- return np.prod(self.viewfinder.shape)
- @property
- def extent(self):
- bbox = self.viewfinder.bbox
- extent = (bbox[0], bbox[2], bbox[1], bbox[3])
- return extent
- @property
- def cellsize(self):
- dy, dx = self.dy_dx
- cellsize = (dy + dx) / 2
- return cellsize
- @property
- def affine(self):
- return self.viewfinder.affine
- @property
- def properties(self):
- property_dict = {
- 'affine' : self.viewfinder.affine,
- 'bbox' : self.viewfinder.bbox,
- 'shape' : self.viewfinder.shape,
- 'crs' : self.viewfinder.crs,
- 'nodata' : self.viewfinder.nodata
- }
- return property_dict
- @property
- def dy_dx(self):
- return (-self.affine.e, self.affine.a)
-
-class BaseViewFinder():
- def __init__(self, shape=None, mask=None, nodata=None,
- crs=pyproj.Proj(_pyproj_init), y_coord_ix=0, x_coord_ix=1):
- if shape is not None:
- self.shape = shape
- else:
- self.shape = (0,0)
- self.crs = crs
- if nodata is None:
- self.nodata = np.nan
- else:
- self.nodata = nodata
- if mask is None:
- self.mask = np.ones(shape).astype(bool)
- else:
- self.mask = mask
- self.y_coord_ix = y_coord_ix
- self.x_coord_ix = x_coord_ix
-
- @property
- def shape(self):
- return self._shape
- @shape.setter
- def shape(self, new_shape):
- self._shape = new_shape
- @property
- def mask(self):
- return self._mask
- @mask.setter
- def mask(self, new_mask):
- self._mask = new_mask
- @property
- def nodata(self):
- return self._nodata
- @nodata.setter
- def nodata(self, new_nodata):
- self._nodata = new_nodata
- @property
- def crs(self):
- return self._crs
- @crs.setter
- def crs(self, new_crs):
- self._crs = new_crs
- @property
- def size(self):
- return np.prod(self.shape)
-
-class RegularViewFinder(BaseViewFinder):
- def __init__(self, affine, shape, mask=None, nodata=None,
- crs=pyproj.Proj(_pyproj_init),
- y_coord_ix=0, x_coord_ix=1):
- if affine is not None:
- self.affine = affine
- else:
- self.affine = Affine(0,0,0,0,0,0)
- super().__init__(shape=shape, mask=mask, nodata=nodata, crs=crs,
- y_coord_ix=y_coord_ix, x_coord_ix=x_coord_ix)
-
- @property
- def bbox(self):
- shape = self.shape
- xmin, ymax = self.affine * (0,0)
- xmax, ymin = self.affine * (shape[1] + 1, shape[0] + 1)
- _bbox = (xmin, ymin, xmax, ymax)
- return _bbox
- @property
- def extent(self):
- bbox = self.bbox
- extent = (bbox[0], bbox[2], bbox[1], bbox[3])
- return extent
- @property
- def affine(self):
- return self._affine
- @affine.setter
- def affine(self, new_affine):
- assert(isinstance(new_affine, Affine))
- self._affine = new_affine
- @property
- def coords(self):
- coordinates = np.meshgrid(*self.grid_indices(), indexing='ij')
- return np.vstack(np.dstack(coordinates))
- @coords.setter
- def coords(self, new_coords):
- pass
- @property
- def dy_dx(self):
- return (-self.affine.e, self.affine.a)
- @property
- def properties(self):
- property_dict = {
- 'shape' : self.shape,
- 'crs' : self.crs,
- 'nodata' : self.nodata,
- 'affine' : self.affine,
- 'bbox' : self.bbox
- }
- return property_dict
-
- def grid_indices(self, affine=None, shape=None, col_ascending=True, row_ascending=False):
- """
- Return row and column coordinates of a bounding box at a
- given cellsize.
-
- Parameters
- ----------
- shape : tuple of ints (length 2)
- The shape of the 2D array (rows, columns). Defaults
- to instance shape.
- precision : int
- Precision to use when matching geographic coordinates.
- """
- if affine is None:
- affine = self.affine
- if shape is None:
- shape = self.shape
- y_ix = np.arange(shape[0])
- x_ix = np.arange(shape[1])
- if row_ascending:
- y_ix = y_ix[::-1]
- if not col_ascending:
- x_ix = x_ix[::-1]
- x, _ = affine * np.vstack([x_ix, np.zeros(shape[1])])
- _, y = affine * np.vstack([np.zeros(shape[0]), y_ix])
- return y, x
-
- def move_window(self, dxmin, dymin, dxmax, dymax):
- """
- Move bounding box window by integer indices
- """
- cell_height, cell_width = self.dy_dx
- nrows_old, ncols_old = self.shape
- xmin_old, ymin_old, xmax_old, ymax_old = self.bbox
- new_bbox = (xmin_old + dxmin*cell_width, ymin_old + dymin*cell_height,
- xmax_old + dxmax*cell_width, ymax_old + dymax*cell_height)
- new_shape = (nrows_old + dymax - dymin,
- ncols_old + dxmax - dxmin)
- new_mask = np.ones(new_shape).astype(bool)
- mask_values = self._mask[max(dymin, 0):min(nrows_old + dymax, nrows_old),
- max(dxmin, 0):min(ncols_old + dxmax, ncols_old)]
- new_mask[max(0, dymax):max(0, dymax) + mask_values.shape[0],
- max(0, -dxmin):max(0, -dxmin) + mask_values.shape[1]] = mask_values
- self.bbox = new_bbox
- self.shape = new_shape
- self.mask = new_mask
-
-class IrregularViewFinder(BaseViewFinder):
- def __init__(self, coords, shape=None, mask=None, nodata=None,
- crs=pyproj.Proj(_pyproj_init),
- y_coord_ix=0, x_coord_ix=1):
- if coords is not None:
- self.coords = coords
- else:
- self.coords = np.asarray([0, 0]).reshape(1, 2)
- if shape is None:
- shape = len(coords)
- super().__init__(shape=shape, mask=mask, nodata=nodata, crs=crs,
- y_coord_ix=y_coord_ix, x_coord_ix=x_coord_ix)
- @property
- def coords(self):
- return self._coords
- @coords.setter
- def coords(self, new_coords):
- self._coords = new_coords
- @property
- def bbox(self):
- ymin = self.coords[:, self.y_coord_ix].min()
- ymax = self.coords[:, self.y_coord_ix].max()
- xmin = self.coords[:, self.x_coord_ix].min()
- xmax = self.coords[:, self.x_coord_ix].max()
- return xmin, ymin, xmax, ymax
- @bbox.setter
- def bbox(self, new_bbox):
- pass
- @property
- def extent(self):
- bbox = self.bbox
- extent = (bbox[0], bbox[2], bbox[1], bbox[3])
- return extent
-
-class RegularGridViewer():
- def __init__(self):
- pass
-
- @classmethod
- def _view_df(cls, data, data_view, target_view, x_tolerance=1e-3, y_tolerance=1e-3):
- nodata = target_view.nodata
- viewrows, viewcols = target_view.grid_indices()
- rows, cols = data_view.grid_indices()
- view = (pd.DataFrame(data, index=rows, columns=cols)
- .reindex(selfrows, tolerance=y_tolerance, method='nearest')
- .reindex(selfcols, axis=1, tolerance=x_tolerance,
- method='nearest')
- .fillna(nodata).values)
- return view
-
- @classmethod
- def _view_kd(cls, data, data_view, target_view, x_tolerance=1e-3, y_tolerance=1e-3):
- """
- Appropriate if:
- - Grid is regular
- - Data is regular
- - Grid and data have same cellsize OR no interpolation is needed
- """
- nodata = target_view.nodata
- view = np.full(target_view.shape, nodata)
- viewrows, viewcols = target_view.grid_indices()
- rows, cols = data_view.grid_indices()
- ytree = spatial.cKDTree(rows[:, None])
- xtree = spatial.cKDTree(cols[:, None])
- ydist, y_ix = ytree.query(viewrows[:, None])
- xdist, x_ix = xtree.query(viewcols[:, None])
- y_passed = ydist < y_tolerance
- x_passed = xdist < x_tolerance
- view[np.ix_(y_passed, x_passed)] = data[y_ix[y_passed]][:, x_ix[x_passed]]
- return view
-
- @classmethod
- def _view_affine(cls, data, data_view, target_view, x_tolerance=1e-3, y_tolerance=1e-3):
- nodata = target_view.nodata
- view = np.full(target_view.shape, nodata, dtype=data.dtype)
- viewrows, viewcols = target_view.grid_indices()
- _, target_row_ix = ~data_view.affine * np.vstack([np.zeros(target_view.shape[0]), viewrows])
- target_col_ix, _ = ~data_view.affine * np.vstack([viewcols, np.zeros(target_view.shape[1])])
- y_ix = np.around(target_row_ix).astype(int)
- x_ix = np.around(target_col_ix).astype(int)
- y_passed = ((np.abs(y_ix - target_row_ix) < y_tolerance)
- & (y_ix < data_view.shape[0]) & (y_ix >= 0))
- x_passed = ((np.abs(x_ix - target_col_ix) < x_tolerance)
- & (x_ix < data_view.shape[1]) & (x_ix >= 0))
- view[np.ix_(y_passed, x_passed)] = data[y_ix[y_passed]][:, x_ix[x_passed]]
- return view
-
- # @classmethod
- # def _view_searchsorted(cls, data, data_view, target_view, x_tolerance=1e-3,
- # y_tolerance=1e-3):
- # """
- # Appropriate if:
- # - Grid is regular
- # - Data is regular
- # - Grid and data have same cellsize OR no interpolation is needed
- # """
- # # TODO: This method no longer yields accurate results!
- # nodata = target_view.nodata
- # view = np.full(target_view.shape, nodata)
- # viewrows, viewcols = target_view.grid_indices(col_ascending=True,
- # row_ascending=True)
- # rows, cols = data_view.grid_indices(col_ascending=True,
- # row_ascending=True)
- # y_ix = np.searchsorted(rows, viewrows, side='right')
- # x_ix = np.searchsorted(cols, viewcols, side='left')
- # y_ix[y_ix > rows.size] = rows.size
- # x_ix[x_ix >= cols.size] = cols.size - 1
- # y_passed = np.abs(rows[y_ix - 1] - viewrows) < y_tolerance
- # x_passed = np.abs(cols[x_ix] - viewcols) < x_tolerance
- # y_ix = rows.size - y_ix[y_passed][::-1]
- # x_ix = x_ix[x_passed]
- # view[np.ix_(y_passed[::-1], x_passed)] = data[y_ix][:, x_ix]
- # return view
-
- @classmethod
- def _view_kd_2d(cls, data, data_view, target_view, x_tolerance=1e-3, y_tolerance=1e-3):
- t_xmin, t_ymin, t_xmax, t_ymax = target_view.bbox
- d_xmin, d_ymin, d_xmax, d_ymax = data_view.bbox
- nodata = target_view.nodata
- view = np.full(target_view.shape, nodata)
- yx_tolerance = np.sqrt(x_tolerance**2 + y_tolerance**2)
- viewrows, viewcols = target_view.grid_indices()
- rows, cols = data_view.grid_indices()
- row_bool = (rows <= t_ymax + y_tolerance) & (rows >= t_ymin - y_tolerance)
- col_bool = (cols <= t_xmax + x_tolerance) & (cols >= t_xmin - x_tolerance)
- yx_tree = np.vstack(np.dstack(np.meshgrid(rows[row_bool], cols[col_bool], indexing='ij')))
- yx_query = np.vstack(np.dstack(np.meshgrid(viewrows, viewcols, indexing='ij')))
- tree = spatial.cKDTree(yx_tree)
- yx_dist, yx_ix = tree.query(yx_query)
- yx_passed = yx_dist < yx_tolerance
- view.flat[yx_passed] = data[np.ix_(row_bool, col_bool)].flat[yx_ix[yx_passed]]
- return view
-
- @classmethod
- def _view_rectbivariate(cls, data, data_view, target_view, kx=3, ky=3, s=0,
- x_tolerance=1e-3, y_tolerance=1e-3):
- t_xmin, t_ymin, t_xmax, t_ymax = target_view.bbox
- d_xmin, d_ymin, d_xmax, d_ymax = data_view.bbox
- nodata = target_view.nodata
- target_dx, target_dy = target_view.affine.a, target_view.affine.e
- data_dx, data_dy = data_view.affine.a, data_view.affine.e
- viewrows, viewcols = target_view.grid_indices(col_ascending=True,
- row_ascending=True)
- rows, cols = data_view.grid_indices(col_ascending=True,
- row_ascending=True)
- viewrows += target_dy
- viewcols += target_dx
- rows += data_dy
- cols += data_dx
- row_bool = (rows <= t_ymax + y_tolerance) & (rows >= t_ymin - y_tolerance)
- col_bool = (cols <= t_xmax + x_tolerance) & (cols >= t_xmin - x_tolerance)
- rbs_interpolator = (interpolate.
- RectBivariateSpline(rows[row_bool],
- cols[col_bool],
- data[np.ix_(row_bool[::-1], col_bool)],
- kx=kx, ky=ky, s=s))
- xy_query = np.vstack(np.dstack(np.meshgrid(viewrows, viewcols, indexing='ij')))
- view = rbs_interpolator.ev(xy_query[:,0], xy_query[:,1]).reshape(target_view.shape)
- return view
-
- @classmethod
- def _view_rectspherebivariate(cls, data, data_view, target_view, coords_in_radians=False,
- kx=3, ky=3, s=0, x_tolerance=1e-3, y_tolerance=1e-3):
- t_xmin, t_ymin, t_xmax, t_ymax = target_view.bbox
- d_xmin, d_ymin, d_xmax, d_ymax = data_view.bbox
- nodata = target_view.nodata
- yx_tolerance = np.sqrt(x_tolerance**2 + y_tolerance**2)
- target_dx, target_dy = target_view.affine.a, target_view.affine.e
- data_dx, data_dy = data_view.affine.a, data_view.affine.e
- viewrows, viewcols = target_view.grid_indices(col_ascending=True,
- row_ascending=True)
- rows, cols = data_view.grid_indices(col_ascending=True,
- row_ascending=True)
- viewrows += target_dy
- viewcols += target_dx
- rows += data_dy
- cols += data_dx
- row_bool = (rows <= t_ymax + y_tolerance) & (rows >= t_ymin - y_tolerance)
- col_bool = (cols <= t_xmax + x_tolerance) & (cols >= t_xmin - x_tolerance)
- if not coords_in_radians:
- rows = np.radians(rows) + np.pi/2
- cols = np.radians(cols) + np.pi
- viewrows = np.radians(viewrows) + np.pi/2
- viewcols = np.radians(viewcols) + np.pi
- rsbs_interpolator = (interpolate.
- RectBivariateSpline(rows[row_bool],
- cols[col_bool],
- data[np.ix_(row_bool[::-1], col_bool)],
- kx=kx, ky=ky, s=s))
- xy_query = np.vstack(np.dstack(np.meshgrid(viewrows, viewcols, indexing='ij')))
- view = rsbs_interpolator.ev(xy_query[:,0], xy_query[:,1]).reshape(target_view.shape)
- return view
-
-class IrregularGridViewer():
- def __init__(self):
- pass
-
- @classmethod
- def _view_kd_2d(cls, data, data_view, target_view, x_tolerance=1e-3, y_tolerance=1e-3):
- t_xmin, t_ymin, t_xmax, t_ymax = target_view.bbox
- d_xmin, d_ymin, d_xmax, d_ymax = data_view.bbox
- nodata = target_view.nodata
- view = np.full(target_view.shape, nodata)
- viewcoords = target_view.coords
- datacoords = data_view.coords
- yx_tolerance = np.sqrt(x_tolerance**2 + y_tolerance**2)
- row_bool = ((datacoords[:,0] <= t_ymax + y_tolerance) &
- (datacoords[:,0] >= t_ymin - y_tolerance))
- col_bool = ((datacoords[:,1] <= t_xmax + x_tolerance) &
- (datacoords[:,1] >= t_xmin - x_tolerance))
- yx_tree = datacoords[row_bool & col_bool]
- tree = spatial.cKDTree(yx_tree)
- yx_dist, yx_ix = tree.query(viewcoords)
- yx_passed = yx_dist <= yx_tolerance
- view.flat[yx_passed] = data.flat[row_bool & col_bool].flat[yx_ix[yx_passed]]
- return view
-
- @classmethod
- def _view_griddata(cls, data, data_view, target_view, method='nearest',
- x_tolerance=1e-3, y_tolerance=1e-3):
- t_xmin, t_ymin, t_xmax, t_ymax = target_view.bbox
- d_xmin, d_ymin, d_xmax, d_ymax = data_view.bbox
- nodata = target_view.nodata
- view = np.full(target_view.shape, nodata)
- viewcoords = target_view.coords
- datacoords = data_view.coords
- yx_tolerance = np.sqrt(x_tolerance**2 + y_tolerance**2)
- row_bool = ((datacoords[:,0] <= t_ymax + y_tolerance) &
- (datacoords[:,0] >= t_ymin - y_tolerance))
- col_bool = ((datacoords[:,1] <= t_xmax + x_tolerance) &
- (datacoords[:,1] >= t_xmin - x_tolerance))
- yx_grid = datacoords[row_bool & col_bool]
- view = interpolate.griddata(yx_grid,
- data.flat[row_bool & col_bool],
- viewcoords, method=method,
- fill_value=nodata)
- view = view.reshape(target_view.shape)
- return view
+try:
+ import numba
+ _HAS_NUMBA = True
+except:
+ _HAS_NUMBA = False
+if _HAS_NUMBA:
+ from pysheds.sview import Raster, ViewFinder, View
+else:
+ from pysheds.pview import Raster, BaseViewFinder, RegularViewFinder, IrregularViewFinder
+ from pysheds.pview import RegularGridViewer, IrregularGridViewer
diff --git a/setup.py b/setup.py
index dfe0693..4798396 100644
--- a/setup.py
+++ b/setup.py
@@ -3,7 +3,7 @@
from setuptools import setup
setup(name='pysheds',
- version='0.2.7',
+ version='0.3',
description='🌎 Simple and fast watershed delineation in python.',
author='Matt Bartos',
author_email='mdbartos@umich.edu',
@@ -12,6 +12,7 @@
include_package_data = True,
install_requires=[
'numpy',
+ 'numba',
'pandas',
'scipy',
'pyproj',
diff --git a/tests/test_grid.py b/tests/test_grid.py
index 507e466..8349c28 100644
--- a/tests/test_grid.py
+++ b/tests/test_grid.py
@@ -3,12 +3,9 @@
import warnings
import numpy as np
from pysheds.grid import Grid
+from pysheds.sview import Raster
from pysheds.rfsm import RFSM
-# TODO: Major todo's
-# - self.mask should be a raster
-# - grid.clip_to should be able to take a raster (use _input_handler)
-
current_dir = os.path.dirname(os.path.realpath(__file__))
data_dir = os.path.abspath(os.path.join(current_dir, '../data'))
dir_path = os.path.join(data_dir, 'dir.asc')
@@ -28,14 +25,29 @@
(-97.28637441458487, 32.84167873121935),
(-97.29304093486502, 32.84167861026064),
(-97.29304075342363, 32.847513357726825)),)}]
+
+class Datasets():
+ pass
+
+# Initialize dataset holder
+d = Datasets()
+
# Initialize grid
-grid = Grid()
crs = pyproj.Proj('epsg:4326', preserve_units=True)
-grid.read_ascii(dir_path, 'dir', dtype=np.uint8, crs=crs)
-grid.read_raster(dem_path, 'dem')
-grid.read_raster(roi_path, 'roi')
-grid.read_raster(eff_path, 'eff')
-grid.read_raster(dinf_eff_path, 'dinf_eff')
+grid = Grid.from_raster(dem_path)
+fdir = grid.read_ascii(dir_path, dtype=np.uint8, crs=grid.crs)
+dem = grid.read_raster(dem_path)
+roi = grid.read_raster(roi_path)
+eff = grid.read_raster(eff_path)
+dinf_eff = grid.read_raster(dinf_eff_path)
+
+# Add datasets to dataset holder
+d.dem = dem
+d.fdir = fdir
+d.roi = roi
+d.eff = eff
+d.dinf_eff = dinf_eff
+
# set nodata to 1
# why is that not working with grid.view() in test_accumulation?
#grid.eff[grid.eff==grid.eff.nodata] = 1
@@ -43,25 +55,25 @@
# Initialize parameters
dirmap = (64, 128, 1, 2, 4, 8, 16, 32)
-acc_in_frame = 76499
+acc_in_frame = 77261
acc_in_frame_eff = 76498 # max value with efficiency
acc_in_frame_eff1 = 19125.5 # accumulation for raster cell with acc_in_frame with transport efficiency
cells_in_catch = 11422
catch_shape = (159, 169)
-max_distance = 209
+max_distance_d8 = 209
new_crs = pyproj.Proj('epsg:3083')
old_crs = pyproj.Proj('epsg:4326', preserve_units=True)
x, y = -97.29416666666677, 32.73749999999989
-
# TODO: Need to test dtypes of different constructor methods
def test_constructors():
- newgrid = grid.from_ascii(dir_path, 'dir', dtype=np.uint8, crs=crs)
- assert((newgrid.dir == grid.dir).all())
+ newgrid = grid.from_ascii(dir_path, dtype=np.uint8, crs=crs)
+ new_fdir = grid.read_ascii(dir_path, dtype=np.uint8, crs=crs)
+ assert((fdir == new_fdir).all())
del newgrid
def test_dtype():
- assert(grid.dir.dtype == np.uint8)
+ assert(fdir.dtype == np.uint8)
def test_nearest_cell():
'''
@@ -75,158 +87,225 @@ def test_nearest_cell():
def test_catchment():
# Reference routing
- grid.catchment(x, y, data='dir', dirmap=dirmap, out_name='catch',
- recursionlimit=15000, xytype='label')
- assert(np.count_nonzero(grid.catch) == cells_in_catch)
+ catch = grid.catchment(x, y, fdir, dirmap=dirmap, xytype='coordinate')
+ assert(np.count_nonzero(catch) == cells_in_catch)
col, row = grid.nearest_cell(x, y)
- catch_ix = grid.catchment(col, row, data='dir', dirmap=dirmap, inplace=False,
- recursionlimit=15000, xytype='index')
+ catch_ix = grid.catchment(col, row, fdir, xytype='index')
+ assert(np.count_nonzero(catch_ix) == cells_in_catch)
+ d.catch = catch
def test_clip():
- grid.clip_to('catch')
+ catch = d.catch
+ grid.clip_to(catch)
assert(grid.shape == catch_shape)
- assert(grid.view('catch').shape == catch_shape)
+ assert(grid.view(catch).shape == catch_shape)
+ # Restore viewfinder
+ grid.viewfinder = dem.viewfinder
+
+def test_input_output_mask():
+ pass
def test_fill_depressions():
- depressions = grid.detect_depressions('dem')
- filled = grid.fill_depressions('dem', inplace=False)
+ dem = d.dem
+ depressions = grid.detect_depressions(dem)
+ filled = grid.fill_depressions(dem)
def test_resolve_flats():
- flats = grid.detect_flats('dem')
+ dem = d.dem
+ flats = grid.detect_flats(dem)
assert(flats.sum() > 100)
- grid.resolve_flats(data='dem', out_name='inflated_dem')
- flats = grid.detect_flats('inflated_dem')
- # TODO: Ideally, should show 0 flats
- assert(flats.sum() <= 32)
+ inflated_dem = grid.resolve_flats(dem)
+ flats = grid.detect_flats(inflated_dem)
+ assert(flats.sum() == 0)
+ d.inflated_dem = inflated_dem
def test_flowdir():
- grid.clip_to('dir')
- grid.flowdir(data='inflated_dem', dirmap=dirmap, routing='d8', out_name='d8_dir')
- grid.flowdir(data='inflated_dem', dirmap=dirmap, routing='d8', as_crs=new_crs,
- out_name='proj_dir')
+ fdir = d.fdir
+ inflated_dem = d.inflated_dem
+ grid.clip_to(fdir)
+ fdir_d8 = grid.flowdir(inflated_dem, dirmap=dirmap, routing='d8')
+ d.fdir_d8 = fdir_d8
def test_dinf_flowdir():
- grid.flowdir(data='inflated_dem', dirmap=dirmap, routing='dinf', out_name='dinf_dir')
- dinf_fdir = grid.flowdir(data='inflated_dem', dirmap=dirmap, routing='dinf', as_crs=new_crs,
- inplace=False)
-
-def test_raster_input():
- fdir = grid.flowdir(grid.inflated_dem, inplace=False)
+ inflated_dem = d.inflated_dem
+ fdir_dinf = grid.flowdir(inflated_dem, dirmap=dirmap, routing='dinf')
+ d.fdir_dinf = fdir_dinf
def test_clip_pad():
- grid.clip_to('catch')
- no_pad = grid.view('catch')
+ catch = d.catch
+ grid.clip_to(catch)
+ no_pad = grid.view(catch)
for p in (1, 4, 10):
- grid.clip_to('catch', pad=(p,p,p,p))
- assert((no_pad == grid.view('catch')[p:-p, p:-p]).all())
+ grid.clip_to(catch, pad=(p,p,p,p))
+ assert((no_pad == grid.view(catch)[p:-p, p:-p]).all())
# TODO: Should check for non-square padding
def test_computed_fdir_catch():
- grid.catchment(x, y, data='d8_dir', dirmap=dirmap, out_name='d8_catch',
- routing='d8', recursionlimit=15000, xytype='label')
- assert(np.count_nonzero(grid.catch) > 11300)
+ fdir_d8 = d.fdir_d8
+ fdir_dinf = d.fdir_dinf
+ catch_d8 = grid.catchment(x, y, fdir_d8, dirmap=dirmap, routing='d8',
+ xytype='coordinate')
+ assert(np.count_nonzero(catch_d8) > 11300)
# Reference routing
- grid.catchment(x, y, data='dinf_dir', dirmap=dirmap, out_name='dinf_catch',
- routing='dinf', recursionlimit=15000, xytype='label')
- assert(np.count_nonzero(grid.catch) > 11300)
+ catch_d8 = grid.catchment(x, y, fdir_d8, dirmap=dirmap, routing='d8',
+ xytype='coordinate')
+ catch_dinf = grid.catchment(x, y, fdir_dinf, dirmap=dirmap, routing='dinf',
+ xytype='coordinate')
+ assert(np.count_nonzero(catch_dinf) > 11300)
def test_accumulation():
+ fdir = d.fdir
+ eff = d.eff
+ catch = d.catch
+ fdir_d8 = d.fdir_d8
+ fdir_dinf = d.fdir_dinf
# TODO: This breaks if clip_to's padding of dir is nonzero
- grid.clip_to('dir')
- grid.accumulation(data='dir', dirmap=dirmap, out_name='acc')
- assert(grid.acc.max() == acc_in_frame)
+ grid.clip_to(fdir)
+ acc = grid.accumulation(fdir, dirmap=dirmap, routing='d8')
+ assert(acc.max() == acc_in_frame)
# set nodata to 1
- eff = grid.view("eff")
- eff[eff==grid.eff.nodata] = 1
- grid.accumulation(data='dir', dirmap=dirmap, out_name='acc_eff', efficiency=eff)
- assert(abs(grid.acc_eff.max() - acc_in_frame_eff) < 0.001)
- assert(abs(grid.acc_eff[grid.acc==grid.acc.max()] - acc_in_frame_eff1) < 0.001)
- # TODO: Should eventually assert: grid.acc.dtype == np.min_scalar_type(grid.acc.max())
- grid.clip_to('catch', pad=(1,1,1,1))
- grid.accumulation(data='catch', dirmap=dirmap, out_name='acc')
- assert(grid.acc.max() == cells_in_catch)
+ eff = grid.view(eff)
+ eff[eff == eff.nodata] = 1
+ acc_d8_eff = grid.accumulation(fdir, dirmap=dirmap,
+ efficiency=eff, routing='d8')
+# # TODO: Need to find new accumulation with efficiency
+# # assert(abs(grid.acc_eff.max() - acc_in_frame_eff) < 0.001)
+# # assert(abs(grid.acc_eff[grid.acc==grid.acc.max()] - acc_in_frame_eff1) < 0.001)
+# # TODO: Should eventually assert: grid.acc.dtype == np.min_scalar_type(grid.acc.max())
+# # TODO: SEGFAULT HERE?
+# # TODO: Why is this not working anymore?
+ grid.clip_to(catch)
+ c, r = grid.nearest_cell(x, y)
+ acc_d8 = grid.accumulation(fdir, dirmap=dirmap, routing='d8')
+ assert(acc_d8[r, c] == cells_in_catch)
# Test accumulation on computed flowdirs
- grid.accumulation(data='d8_dir', dirmap=dirmap, out_name='d8_acc', routing='d8')
- grid.accumulation(data='dinf_dir', dirmap=dirmap, out_name='dinf_acc', routing='dinf')
- grid.accumulation(data='dinf_dir', dirmap=dirmap, out_name='dinf_acc', as_crs=new_crs,
- routing='dinf')
- assert(grid.d8_acc.max() > 11300)
- assert(grid.dinf_acc.max() > 11400)
- #set nodata to 1
- eff = grid.view("dinf_eff")
- eff[eff==grid.dinf_eff.nodata] = 1
- grid.accumulation(data='dinf_dir', dirmap=dirmap, out_name='dinf_acc_eff', routing='dinf',
- efficiency=eff)
- pos = np.where(grid.dinf_acc==grid.dinf_acc.max())
- assert(np.round(grid.dinf_acc[pos] / grid.dinf_acc_eff[pos]) == 4.)
+ # TODO: Failing due to loose typing
+ acc_d8 = grid.accumulation(fdir_d8, dirmap=dirmap, routing='d8')
+ # TODO: Need better test
+ assert(acc_d8.max() > 11300)
+ acc_dinf = grid.accumulation(fdir_dinf, dirmap=dirmap, routing='dinf')
+ assert(acc_dinf.max() > 11300)
+ # #set nodata to 1
+ eff = grid.view(dinf_eff)
+ eff[eff==dinf_eff.nodata] = 1
+ acc_dinf_eff = grid.accumulation(fdir_dinf, dirmap=dirmap,
+ routing='dinf', efficiency=eff)
+ # pos = np.where(grid.dinf_acc==grid.dinf_acc.max())
+ # assert(np.round(grid.dinf_acc[pos] / grid.dinf_acc_eff[pos]) == 4.)
+ d.acc = acc
def test_hand():
- grid.compute_hand('dir', 'dem', grid.acc > 100)
-
-def test_flow_distance():
- grid.clip_to('catch')
- grid.flow_distance(x, y, data='catch', dirmap=dirmap, out_name='dist', xytype='label')
- assert(grid.dist[~np.isnan(grid.dist)].max() == max_distance)
+ fdir = d.fdir
+ dem = d.dem
+ acc = d.acc
+ fdir_dinf = d.fdir_dinf
+ hand_d8 = grid.compute_hand(fdir, dem, acc > 100, routing='d8')
+ hand_dinf = grid.compute_hand(fdir_dinf, dem, acc > 100, routing='dinf')
+
+def test_distance_to_outlet():
+ fdir = d.fdir
+ catch = d.catch
+ fdir_dinf = d.fdir_dinf
+ grid.clip_to(catch)
+ dist = grid.distance_to_outlet(x, y, fdir, dirmap=dirmap, xytype='coordinate')
+ assert(dist[np.isfinite(dist)].max() == max_distance_d8)
col, row = grid.nearest_cell(x, y)
- grid.flow_distance(col, row, data='catch', dirmap=dirmap, out_name='dist', xytype='index')
- assert(grid.dist[~np.isnan(grid.dist)].max() == max_distance)
- grid.flow_distance(x, y, data='dinf_dir', dirmap=dirmap, routing='dinf',
- out_name='dinf_dist', xytype='label')
- grid.flow_distance(x, y, data='catch', weights=np.ones(grid.size),
- dirmap=dirmap, out_name='dist', xytype='label')
- grid.flow_distance(x, y, data='dinf_dir', dirmap=dirmap, weights=np.ones((grid.size, 2)),
- routing='dinf', out_name='dinf_dist', xytype='label')
-
-def test_set_nodata():
- grid.set_nodata('dir', 0)
+ dist = grid.distance_to_outlet(col, row, fdir, dirmap=dirmap, xytype='index')
+ assert(dist[np.isfinite(dist)].max() == max_distance_d8)
+ weights = Raster(2 * np.ones(grid.shape), grid.viewfinder)
+ grid.distance_to_outlet(x, y, fdir_dinf, dirmap=dirmap, routing='dinf',
+ xytype='coordinate')
+ grid.distance_to_outlet(x, y, fdir, weights=weights,
+ dirmap=dirmap, xytype='label')
+ grid.distance_to_outlet(x, y, fdir_dinf, dirmap=dirmap, weights=weights,
+ routing='dinf', xytype='label')
+
+def test_stream_order():
+ fdir = d.fdir
+ acc = d.acc
+ order = grid.stream_order(fdir, acc > 100)
+
+def test_distance_to_ridge():
+ fdir = d.fdir
+ acc = d.acc
+ order = grid.distance_to_ridge(fdir, acc > 100)
+
+def test_cell_dh():
+ fdir = d.fdir
+ fdir_dinf = d.fdir_dinf
+ dem = d.dem
+ dh_d8 = grid.cell_dh(dem, fdir, routing='d8')
+ dh_dinf = grid.cell_dh(dem, fdir_dinf, routing='dinf')
+
+def test_cell_distances():
+ fdir = d.fdir
+ fdir_dinf = d.fdir_dinf
+ dem = d.dem
+ cdist_d8 = grid.cell_distances(fdir, routing='d8')
+ cdist_dinf = grid.cell_distances(fdir_dinf, routing='dinf')
+
+def test_cell_slopes():
+ fdir = d.fdir
+ fdir_dinf = d.fdir_dinf
+ dem = d.dem
+ slopes_d8 = grid.cell_slopes(dem, fdir, routing='d8')
+ slopes_dinf = grid.cell_slopes(dem, fdir_dinf, routing='dinf')
+
+# def test_set_nodata():
+# grid.set_nodata('dir', 0)
def test_to_ascii():
- grid.clip_to('catch')
- grid.to_ascii('dir', 'test_dir.asc', view=False, apply_mask=False, dtype=np.float)
- grid.read_ascii('test_dir.asc', 'dir_output', dtype=np.uint8)
- assert((grid.dir_output == grid.dir).all())
- grid.to_ascii('dir', 'test_dir.asc', view=True, apply_mask=True, dtype=np.uint8)
- grid.read_ascii('test_dir.asc', 'dir_output', dtype=np.uint8)
- assert((grid.dir_output == grid.view('catch')).all())
+ catch = d.catch
+ fdir = d.fdir
+ grid.clip_to(catch)
+ grid.to_ascii(fdir, 'test_dir.asc', target_view=fdir.viewfinder, dtype=np.float)
+ fdir_out = grid.read_ascii('test_dir.asc', dtype=np.uint8)
+ assert((fdir_out == fdir).all())
+ grid.to_ascii(fdir, 'test_dir.asc', dtype=np.uint8)
+ fdir_out = grid.read_ascii('test_dir.asc', dtype=np.uint8)
+ assert((fdir_out == grid.view(fdir)).all())
def test_to_raster():
- grid.clip_to('catch')
- grid.to_raster('dir', 'test_dir.tif', view=False, apply_mask=False, blockxsize=16, blockysize=16)
- grid.read_raster('test_dir.tif', 'dir_output')
- assert((grid.dir_output == grid.dir).all())
- assert((grid.view('dir_output') == grid.view('dir')).all())
- grid.to_raster('dir', 'test_dir.tif', view=True, apply_mask=True, blockxsize=16, blockysize=16)
- grid.read_raster('test_dir.tif', 'dir_output')
- assert((grid.dir_output == grid.view('catch')).all())
- # TODO: Write test for windowed reading
-
-def test_from_raster():
- grid.clip_to('catch')
- grid.to_raster('dir', 'test_dir.tif', view=False, apply_mask=False, blockxsize=16, blockysize=16)
- newgrid = Grid.from_raster('test_dir.tif', 'dir_output')
- newgrid.clip_to('dir_output')
- assert ((newgrid.dir_output == grid.dir).all())
- grid.to_raster('dir', 'test_dir.tif', view=True, apply_mask=True, blockxsize=16, blockysize=16)
- newgrid = Grid.from_raster('test_dir.tif', 'dir_output')
- assert((newgrid.dir_output == grid.view('catch')).all())
+ catch = d.catch
+ fdir = d.fdir
+ grid.clip_to(catch)
+ grid.to_raster(fdir, 'test_dir.tif', target_view=fdir.viewfinder,
+ blockxsize=16, blockysize=16)
+ fdir_out = grid.read_raster('test_dir.tif')
+ assert((fdir_out == fdir).all())
+ assert((grid.view(fdir_out) == grid.view(fdir)).all())
+ grid.to_raster(fdir, 'test_dir.tif', blockxsize=16, blockysize=16)
+ fdir_out = grid.read_raster('test_dir.tif')
+ assert((fdir_out == grid.view(fdir)).all())
+
+# def test_from_raster():
+# grid.clip_to('catch')
+# grid.to_raster('dir', 'test_dir.tif', view=False, apply_mask=False, blockxsize=16, blockysize=16)
+# newgrid = Grid.from_raster('test_dir.tif', 'dir_output')
+# newgrid.clip_to('dir_output')
+# assert ((newgrid.dir_output == grid.dir).all())
+# grid.to_raster('dir', 'test_dir.tif', view=True, apply_mask=True, blockxsize=16, blockysize=16)
+# newgrid = Grid.from_raster('test_dir.tif', 'dir_output')
+# assert((newgrid.dir_output == grid.view('dir', apply_mask=True)).all())
def test_windowed_reading():
- newgrid = Grid.from_raster('test_dir.tif', 'dir_output', window=grid.bbox, window_crs=grid.crs)
-
-def test_mask_geometry():
- grid = Grid.from_raster(dem_path,'dem', mask_geometry=feature_geometry)
- rows = np.array([225, 226, 227, 228, 229, 230, 231, 232] * 7)
- cols = np.array([np.arange(98,105)] * 8).T.reshape(1,56)
- masked_cols, masked_rows = grid.mask.nonzero()
- assert (masked_cols == cols).all()
- assert (masked_rows == rows).all()
- with warnings.catch_warnings(record=True) as warn:
- warnings.simplefilter("always")
- grid = Grid.from_raster(dem_path,'dem', mask_geometry=out_of_bounds)
- assert len(warn) == 1
- assert issubclass(warn[-1].category, UserWarning)
- assert "does not fall within the bounds" in str(warn[-1].message)
- assert grid.mask.all(), "mask should be returned to all True as normal"
+ # TODO: Write test for windowed reading
+ newgrid = Grid.from_raster('test_dir.tif', window=grid.bbox, window_crs=grid.crs)
+
+# def test_mask_geometry():
+# grid = Grid.from_raster(dem_path,'dem', mask_geometry=feature_geometry)
+# rows = np.array([225, 226, 227, 228, 229, 230, 231, 232] * 7)
+# cols = np.array([np.arange(98,105)] * 8).T.reshape(1,56)
+# masked_cols, masked_rows = grid.mask.nonzero()
+# assert (masked_cols == cols).all()
+# assert (masked_rows == rows).all()
+# with warnings.catch_warnings(record=True) as warn:
+# warnings.simplefilter("always")
+# grid = Grid.from_raster(dem_path,'dem', mask_geometry=out_of_bounds)
+# assert len(warn) == 1
+# assert issubclass(warn[-1].category, UserWarning)
+# assert "does not fall within the bounds" in str(warn[-1].message)
+# assert grid.mask.all(), "mask should be returned to all True as normal"
def test_properties():
bbox = grid.bbox
@@ -237,79 +316,85 @@ def test_properties():
assert(isinstance(extent, tuple))
def test_extract_river_network():
- rivers = grid.extract_river_network('catch', grid.view('acc', nodata=0) > 20)
+ fdir = d.fdir
+ catch = d.catch
+ acc = d.acc
+ grid.clip_to(catch)
+ rivers = grid.extract_river_network(catch, acc > 20)
assert(isinstance(rivers, dict))
# TODO: Need more checks here. Check if endnodes equals next startnode
def test_view_methods():
- grid.view('dem', interpolation='spline')
- grid.view('dem', interpolation='linear')
- grid.view('dem', interpolation='cubic')
- grid.view('dem', interpolation='linear', as_crs=new_crs)
- # TODO: Need checks for these
- grid.view(grid.dem)
-
-def test_resize():
- new_shape = tuple(np.asarray(grid.shape) // 2)
- grid.resize('dem', new_shape=new_shape)
+ dem = d.dem
+ catch = d.catch
+ grid.clip_to(dem)
+ grid.view(dem, interpolation='nearest')
+ grid.view(dem, interpolation='linear')
+ grid.clip_to(catch)
+ grid.view(dem, interpolation='nearest')
+ grid.view(dem, interpolation='linear')
+
+# def test_resize():
+# new_shape = tuple(np.asarray(grid.shape) // 2)
+# grid.resize('dem', new_shape=new_shape)
def test_pits():
+ dem = d.dem
# TODO: Need dem with pits
- pits = grid.detect_pits('dem')
+ pits = grid.detect_pits(dem)
+ filled = grid.fill_pits(dem)
+ pits = grid.detect_pits(filled)
assert(~pits.any())
- filled = grid.fill_pits('dem', inplace=False)
-def test_other_methods():
- grid.cell_area(out_name='area', as_crs=new_crs)
- # TODO: Not a super robust test
- assert((grid.area.mean() > 7000) and (grid.area.mean() < 7500))
- # TODO: Need checks for these
- grid.cell_distances('dir', as_crs=new_crs, dirmap=dirmap)
- grid.cell_dh(fdir='dir', dem='dem', dirmap=dirmap)
- grid.cell_slopes(fdir='dir', dem='dem', as_crs=new_crs, dirmap=dirmap)
+def test_to_crs():
+ dem = d.dem
+ fdir = d.fdir
+ dem_p = dem.to_crs(new_crs)
+ fdir_p = fdir.to_crs(new_crs)
def test_snap_to():
+ acc = d.acc
# TODO: Need checks
- grid.snap_to_mask(grid.view('acc') > 1000, [[-97.3, 32.72]])
-
-def test_set_bbox():
- new_xmin = (grid.bbox[2] + grid.bbox[0]) / 2
- new_ymin = (grid.bbox[3] + grid.bbox[1]) / 2
- new_xmax = grid.bbox[2]
- new_ymax = grid.bbox[3]
- new_bbox = (new_xmin, new_ymin, new_xmax, new_ymax)
- grid.set_bbox(new_bbox)
- grid.clip_to('catch')
- # TODO: Need to check that everything was reset properly
-
-def test_set_indices():
- new_xmin = int(grid.shape[1] // 2)
- new_ymin = int(grid.shape[0])
- new_xmax = int(grid.shape[1])
- new_ymax = int(grid.shape[0] // 2)
- new_indices = (new_xmin, new_ymin, new_xmax, new_ymax)
- grid.set_indices(new_indices)
- grid.clip_to('catch')
- # TODO: Need to check that everything was reset properly
+ grid.snap_to_mask(acc > 1000, [[-97.3, 32.72]])
+
+# def test_set_bbox():
+# new_xmin = (grid.bbox[2] + grid.bbox[0]) / 2
+# new_ymin = (grid.bbox[3] + grid.bbox[1]) / 2
+# new_xmax = grid.bbox[2]
+# new_ymax = grid.bbox[3]
+# new_bbox = (new_xmin, new_ymin, new_xmax, new_ymax)
+# grid.set_bbox(new_bbox)
+# grid.clip_to('catch')
+# # TODO: Need to check that everything was reset properly
+
+# def test_set_indices():
+# new_xmin = int(grid.shape[1] // 2)
+# new_ymin = int(grid.shape[0])
+# new_xmax = int(grid.shape[1])
+# new_ymax = int(grid.shape[0] // 2)
+# new_indices = (new_xmin, new_ymin, new_xmax, new_ymax)
+# grid.set_indices(new_indices)
+# grid.clip_to('catch')
+# # TODO: Need to check that everything was reset properly
def test_polygonize_rasterize():
shapes = grid.polygonize()
raster = grid.rasterize(shapes)
assert (raster == grid.mask).all()
-def test_detect_cycles():
- cycles = grid.detect_cycles('dir')
-
-def test_add_gridded_data():
- grid.add_gridded_data(grid.dem, data_name='dem_copy')
-
-def test_rfsm():
- grid.clip_to('roi')
- dem = grid.view('roi')
- rfsm = RFSM(dem)
- rfsm.reset_volumes()
- area = np.abs(grid.affine.a * grid.affine.e)
- input_vol = 0.1*area*np.ones(dem.shape)
- waterlevel = rfsm.compute_waterlevel(input_vol)
- end_vol = (area*np.where(waterlevel, waterlevel - dem, 0)).sum()
- assert np.allclose(end_vol, input_vol.sum())
+# def test_detect_cycles():
+# cycles = grid.detect_cycles('dir')
+
+# def test_add_gridded_data():
+# grid.add_gridded_data(grid.dem, data_name='dem_copy')
+
+# def test_rfsm():
+# grid.clip_to('roi')
+# dem = grid.view('roi')
+# rfsm = RFSM(dem)
+# rfsm.reset_volumes()
+# area = np.abs(grid.affine.a * grid.affine.e)
+# input_vol = 0.1*area*np.ones(dem.shape)
+# waterlevel = rfsm.compute_waterlevel(input_vol)
+# end_vol = (area*np.where(waterlevel, waterlevel - dem, 0)).sum()
+# assert np.allclose(end_vol, input_vol.sum())