This repository contains all the file for simulation of navigation stack of AMR.
First, clone the repository in src folder for ROS2 workspace
launch the main.launch.py for launching the simulation
ros2 launch amr_sim_ros2 main.launch.py
1.this video shows the rqt graph of final project

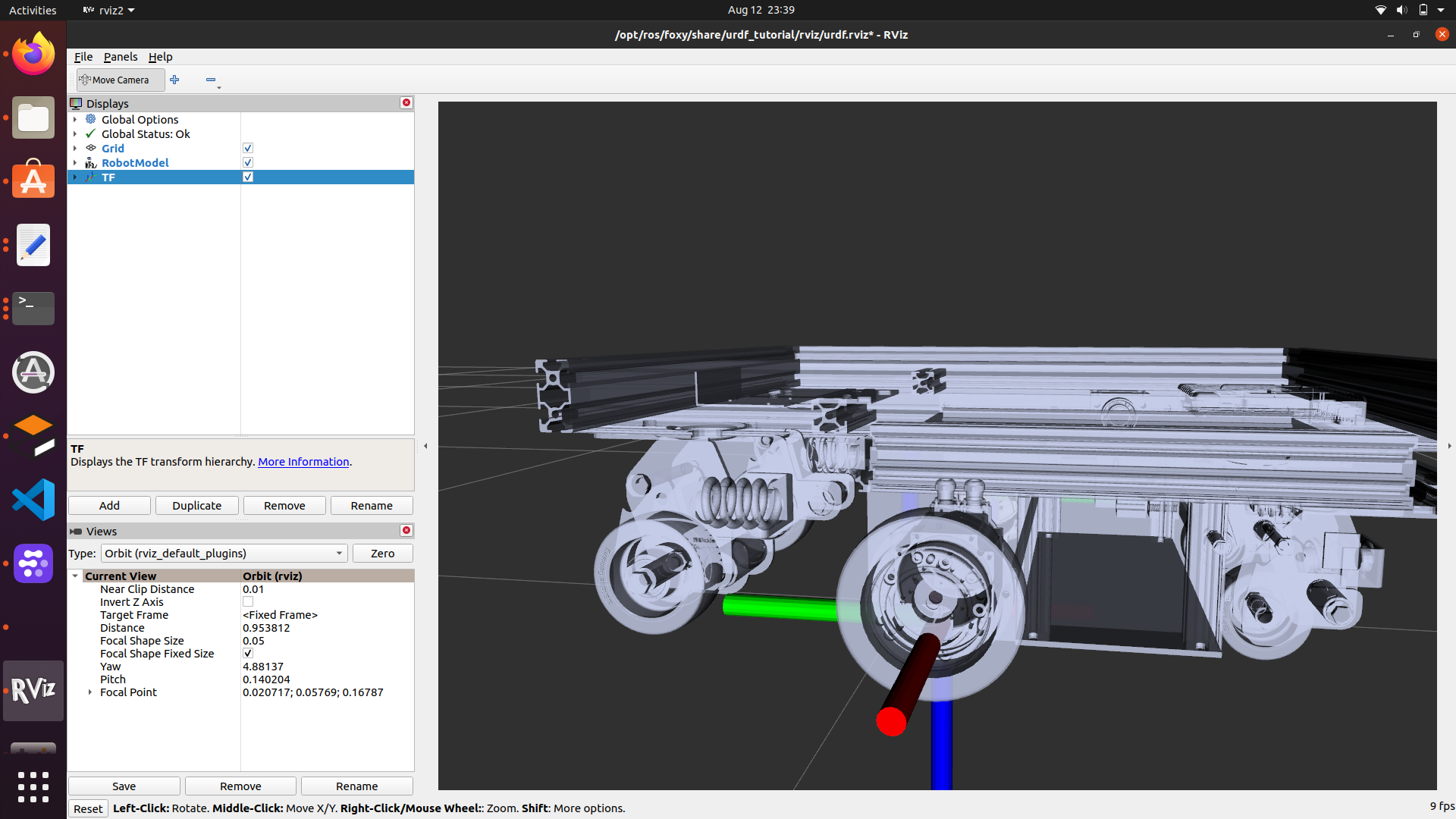
- CAD model of the AMR in GAZEBO and RViz

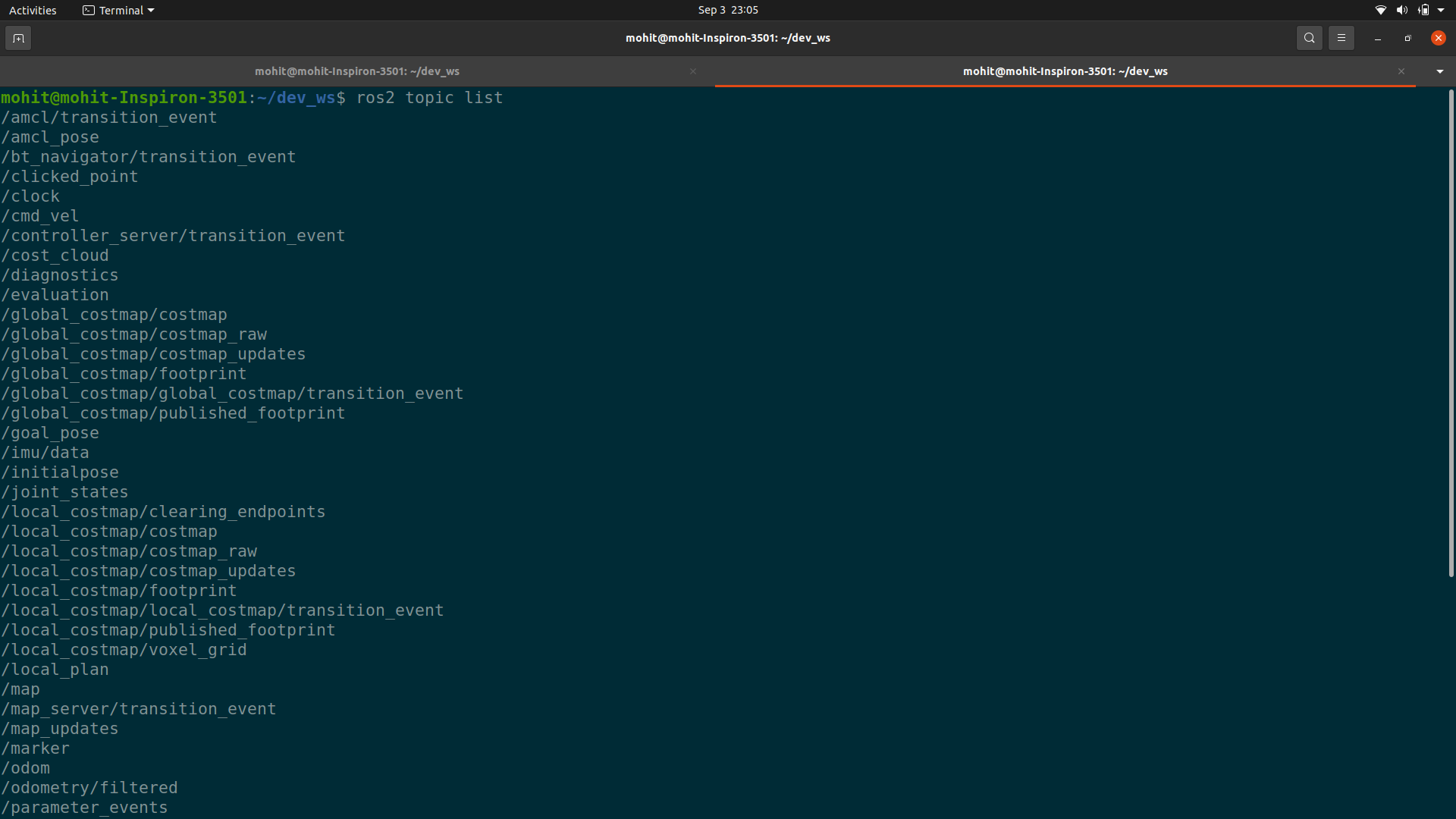
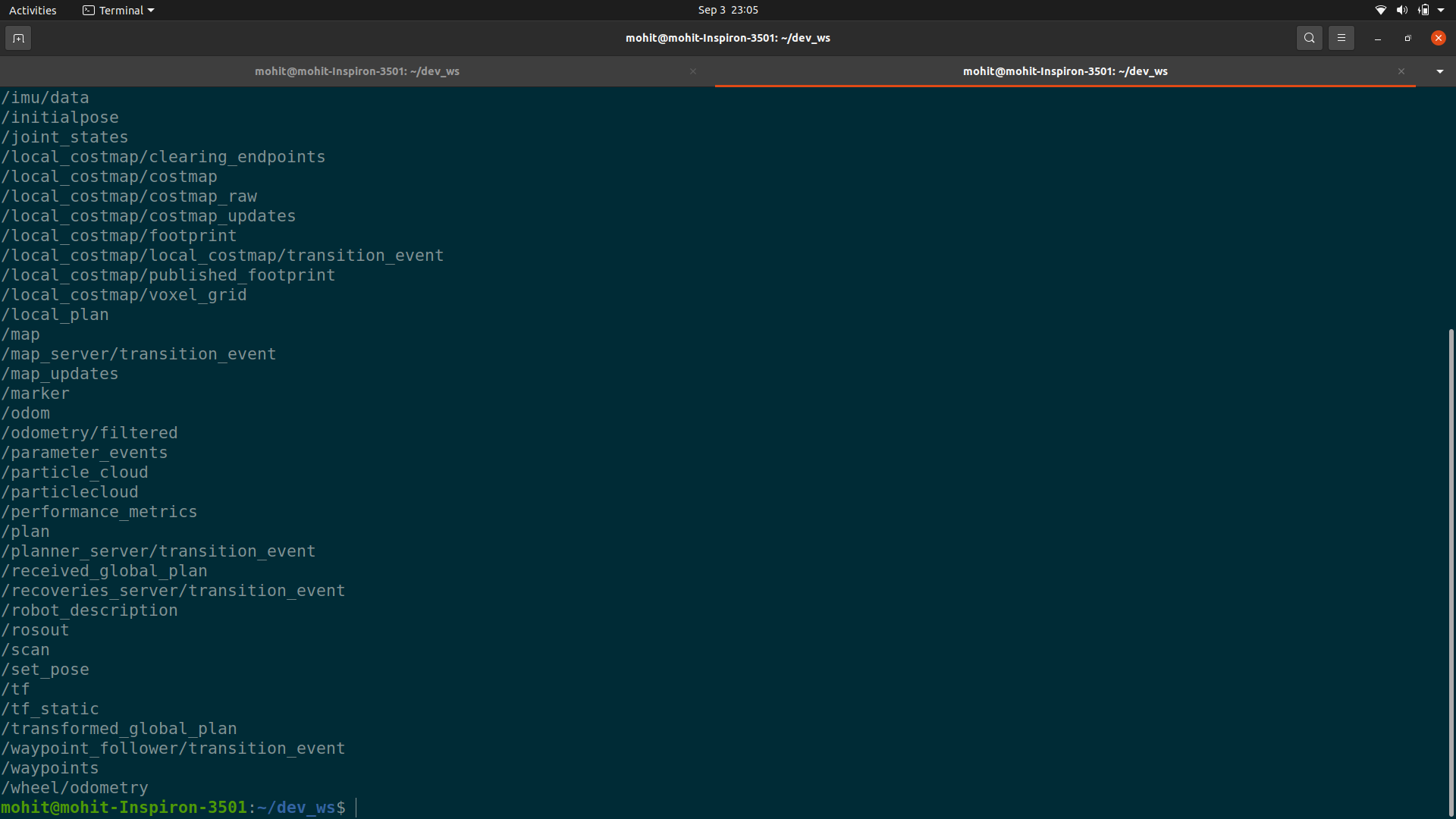
- The topics published after sensor integration and plugins
-
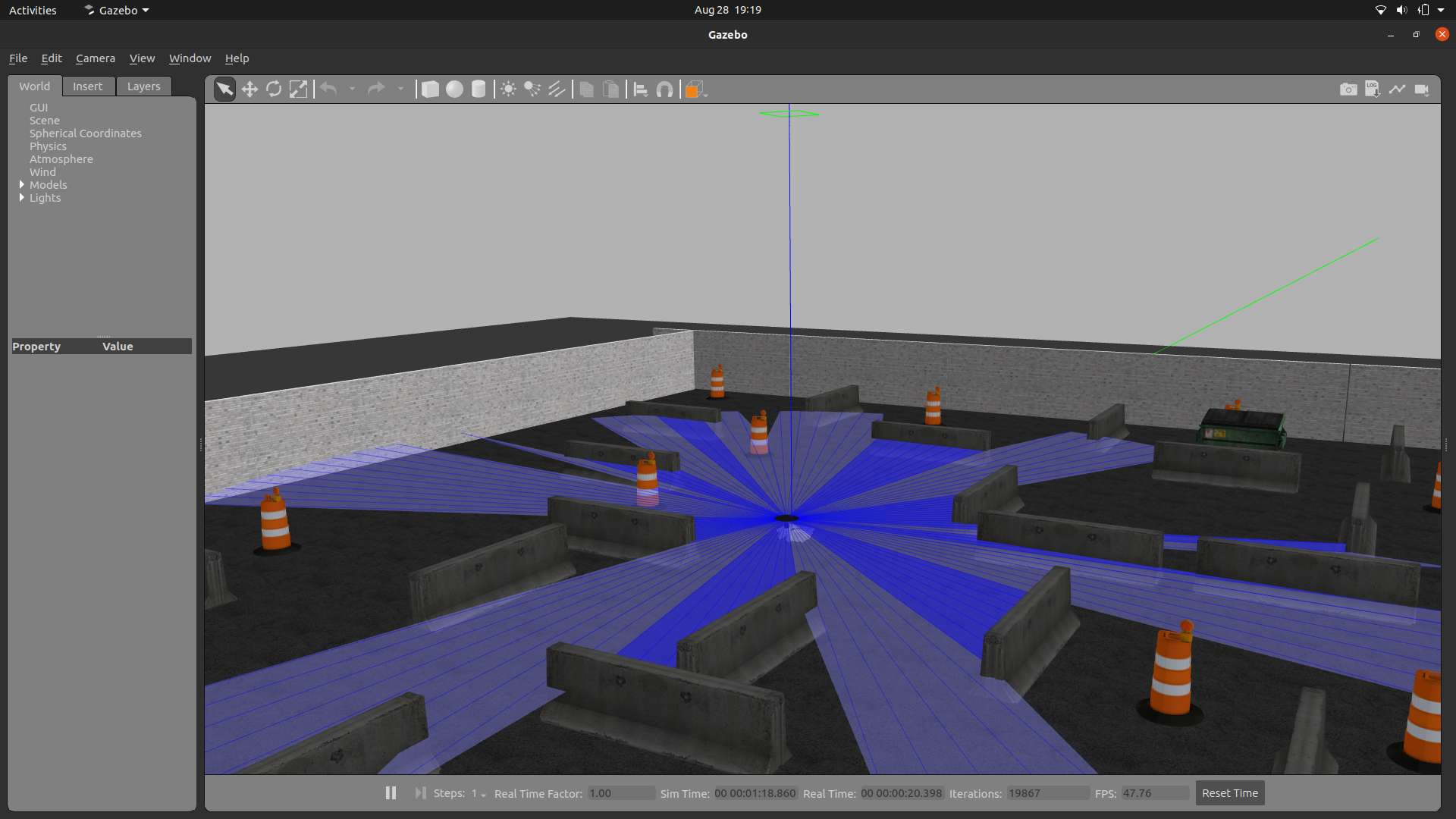
Laser scan
-
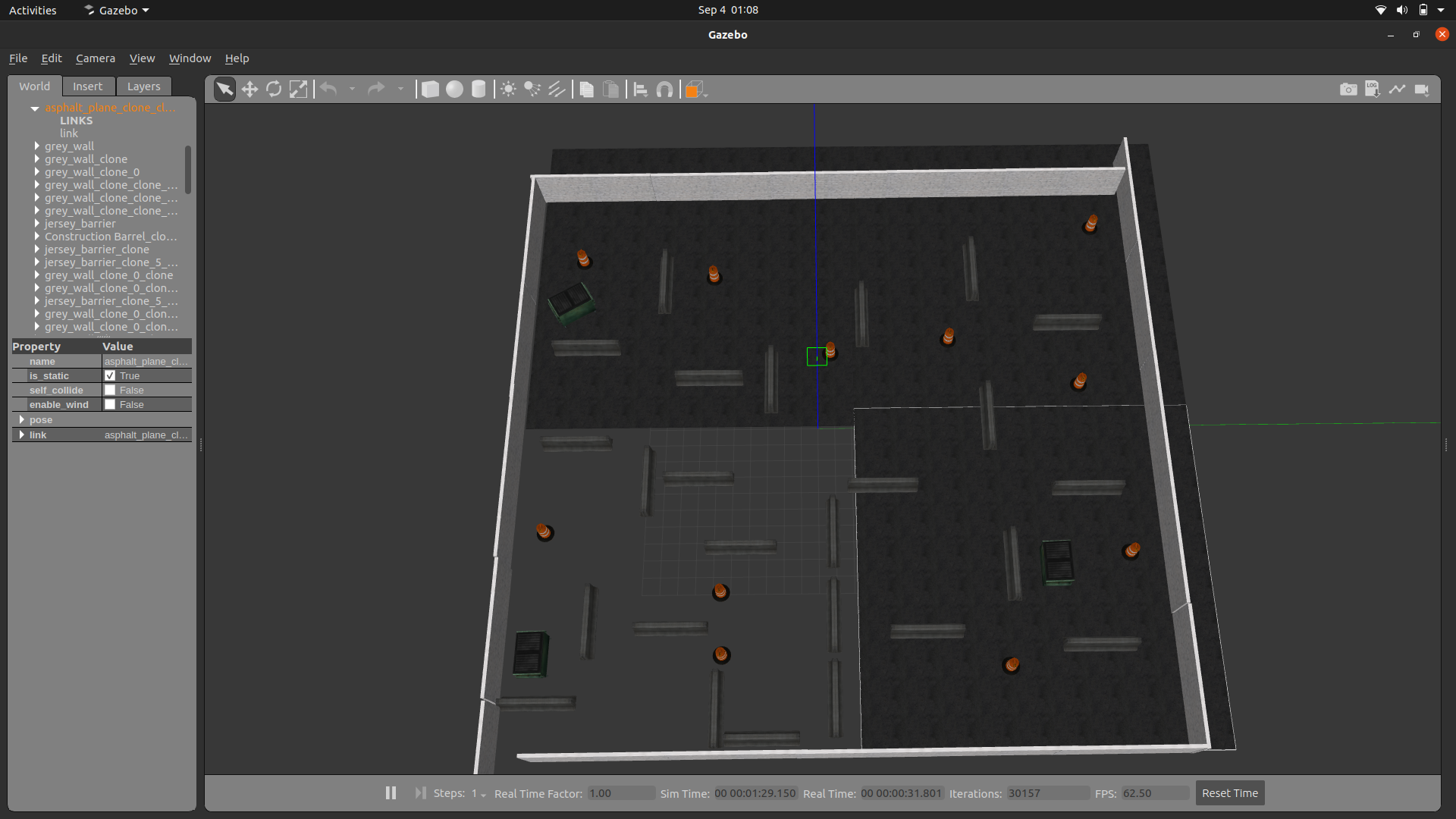
I made a world in the Gazebo
-
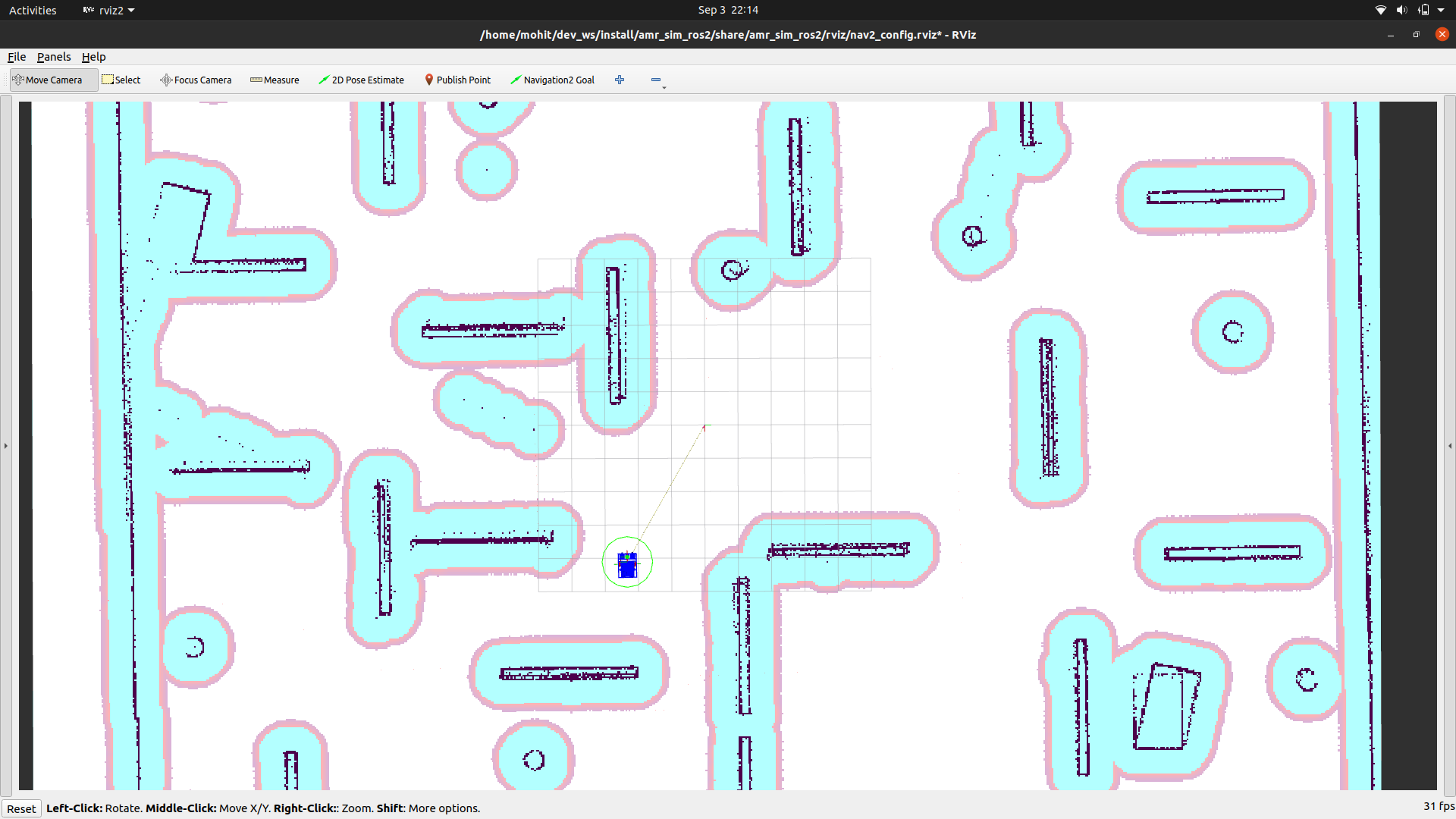
Map file generated using SLAM package
-
The tf tree


-
Autonomous Navigation https://youtu.be/hazH6x8AE20
-
Obstacle Avoidance https://youtu.be/PkttxPBsasU
Thanks , May the ROS force be with you!