diff --git a/docs/cspell.json b/docs/cspell.json
index 3d8494ea388e..9bc9e15152ce 100644
--- a/docs/cspell.json
+++ b/docs/cspell.json
@@ -210,6 +210,7 @@
"Nikhila",
"nohash",
"noqa",
+ "nuScenes",
"numpy",
"nyud",
"obbs",
diff --git a/examples/manifest.yml b/examples/manifest.yml
index fd5d7c5b371e..87f1fe7d4086 100644
--- a/examples/manifest.yml
+++ b/examples/manifest.yml
@@ -72,12 +72,18 @@ root:
- name: human-pose-tracking
python: python/human_pose_tracking
+ - name: lidar
+ python: python/lidar
+
- name: live-camera-edge-detection
python: python/live_camera_edge_detection
- name: live-depth-sensor
python: python/live_depth_sensor
+ - name: nuscenes
+ python: python/nuscenes
+
- name: objectron
python: python/objectron
rust: rust/objectron
diff --git a/examples/python/lidar/.gitignore b/examples/python/lidar/.gitignore
new file mode 100644
index 000000000000..d1ac3a94954e
--- /dev/null
+++ b/examples/python/lidar/.gitignore
@@ -0,0 +1 @@
+dataset/**
diff --git a/examples/python/lidar/README.md b/examples/python/lidar/README.md
new file mode 100644
index 000000000000..35c363c7988e
--- /dev/null
+++ b/examples/python/lidar/README.md
@@ -0,0 +1,23 @@
+---
+title: Lidar
+python: https://github.com/rerun-io/rerun/blob/latest/examples/python/lidar/main.py?speculative-link
+tags: [lidar, 3D]
+description: "Visualize the lidar data from the nuScenes dataset."
+thumbnail: https://static.rerun.io/lidar/bcea9337044919c1524429bd26bc51a3c4db8ccb/480w.png
+thumbnail_dimensions: [480, 286]
+---
+
+
+  +
+
+
+
+
+
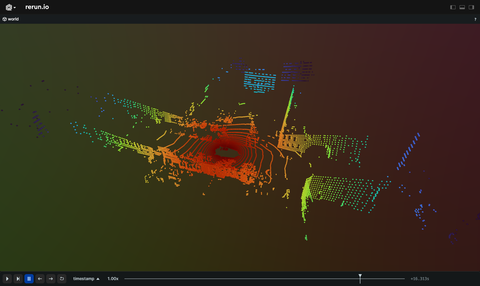
+This example visualizes only the lidar data from the [nuScenes dataset](https://www.nuscenes.org/) using Rerun. For a moe extensive example including other sensors and annotations check out the [nuScenes example](https://www.rerun.io/examples/real-data/nuscenes?speculative-link).
+
+```bash
+pip install -r examples/python/lidar/requirements.txt
+python examples/python/lidar/main.py
+```
diff --git a/examples/python/lidar/dataset b/examples/python/lidar/dataset
new file mode 120000
index 000000000000..407167dd09c5
--- /dev/null
+++ b/examples/python/lidar/dataset
@@ -0,0 +1 @@
+../nuscenes/dataset
\ No newline at end of file
diff --git a/examples/python/lidar/download_dataset.py b/examples/python/lidar/download_dataset.py
new file mode 100644
index 000000000000..fbb384643ffe
--- /dev/null
+++ b/examples/python/lidar/download_dataset.py
@@ -0,0 +1,65 @@
+"""Module to download nuScenes minisplit."""
+from __future__ import annotations
+
+import os
+import pathlib
+import tarfile
+
+import requests
+import tqdm
+
+MINISPLIT_SCENES = [
+ "scene-0061",
+ "scene-0103",
+ "scene-0553",
+ "scene-0655",
+ "scene-0757",
+ "scene-0796",
+ "scene-0916",
+ "scene-1077",
+ "scene-1094",
+ "scene-1100",
+]
+MINISPLIT_URL = "https://www.nuscenes.org/data/v1.0-mini.tgz"
+
+
+def download_file(url: str, dst_file_path: pathlib.Path) -> None:
+ """Download file from url to dst_fpath."""
+ dst_file_path.parent.mkdir(parents=True, exist_ok=True)
+ print(f"Downloading {url} to {dst_file_path}")
+ response = requests.get(url, stream=True)
+ with tqdm.tqdm.wrapattr(
+ open(dst_file_path, "wb"),
+ "write",
+ miniters=1,
+ total=int(response.headers.get("content-length", 0)),
+ desc=f"Downloading {dst_file_path.name}",
+ ) as f:
+ for chunk in response.iter_content(chunk_size=4096):
+ f.write(chunk)
+
+
+def untar_file(tar_file_path: pathlib.Path, dst_path: pathlib.Path, keep_tar: bool = True) -> bool:
+ """Untar tar file at tar_file_path to dst."""
+ print(f"Untar file {tar_file_path}")
+ try:
+ with tarfile.open(tar_file_path, "r") as tf:
+ tf.extractall(dst_path)
+ except Exception as error:
+ print(f"Error unzipping {tar_file_path}, error: {error}")
+ return False
+ if not keep_tar:
+ os.remove(tar_file_path)
+ return True
+
+
+def download_minisplit(root_dir: pathlib.Path) -> None:
+ """
+ Download nuScenes minisplit.
+
+ Adopted from https://colab.research.google.com/github/nutonomy/nuscenes-devkit/blob/master/python-sdk/tutorials/nuscenes_tutorial.ipynb
+ """
+ zip_file_path = pathlib.Path("./v1.0-mini.tgz")
+ if not zip_file_path.is_file():
+ download_file(MINISPLIT_URL, zip_file_path)
+ untar_file(zip_file_path, root_dir, keep_tar=True)
diff --git a/examples/python/lidar/main.py b/examples/python/lidar/main.py
new file mode 100755
index 000000000000..17751652f700
--- /dev/null
+++ b/examples/python/lidar/main.py
@@ -0,0 +1,102 @@
+#!/usr/bin/env python3
+from __future__ import annotations
+
+import argparse
+import os
+import pathlib
+from typing import Final
+
+import matplotlib
+import numpy as np
+import rerun as rr
+from download_dataset import MINISPLIT_SCENES, download_minisplit
+from nuscenes import nuscenes
+
+EXAMPLE_DIR: Final = pathlib.Path(os.path.dirname(__file__))
+DATASET_DIR: Final = EXAMPLE_DIR / "dataset"
+
+# currently need to calculate the color manually
+# see https://github.com/rerun-io/rerun/issues/4409
+cmap = matplotlib.colormaps["turbo_r"]
+norm = matplotlib.colors.Normalize(
+ vmin=3.0,
+ vmax=75.0,
+)
+
+
+def ensure_scene_available(root_dir: pathlib.Path, dataset_version: str, scene_name: str) -> None:
+ """
+ Ensure that the specified scene is available.
+
+ Downloads minisplit into root_dir if scene_name is part of it and root_dir is empty.
+
+ Raises ValueError if scene is not available and cannot be downloaded.
+ """
+ try:
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+ except AssertionError: # dataset initialization failed
+ if dataset_version == "v1.0-mini" and scene_name in MINISPLIT_SCENES:
+ download_minisplit(root_dir)
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+ else:
+ print(f"Could not find dataset at {root_dir} and could not automatically download specified scene.")
+ exit()
+
+ scene_names = [s["name"] for s in nusc.scene]
+ if scene_name not in scene_names:
+ raise ValueError(f"{scene_name=} not found in dataset")
+
+
+def log_nuscenes_lidar(root_dir: pathlib.Path, dataset_version: str, scene_name: str) -> None:
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+
+ scene = next(s for s in nusc.scene if s["name"] == scene_name)
+
+ rr.log("world", rr.ViewCoordinates.RIGHT_HAND_Z_UP, timeless=True)
+
+ first_sample = nusc.get("sample", scene["first_sample_token"])
+ current_lidar_token = first_sample["data"]["LIDAR_TOP"]
+ while current_lidar_token != "":
+ sample_data = nusc.get("sample_data", current_lidar_token)
+
+ data_file_path = nusc.dataroot / sample_data["filename"]
+ pointcloud = nuscenes.LidarPointCloud.from_file(str(data_file_path))
+ points = pointcloud.points[:3].T # shape after transposing: (num_points, 3)
+ point_distances = np.linalg.norm(points, axis=1)
+ point_colors = cmap(norm(point_distances))
+
+ # timestamps are in microseconds
+ rr.set_time_seconds("timestamp", sample_data["timestamp"] * 1e-6)
+ rr.log("world/lidar", rr.Points3D(points, colors=point_colors))
+
+ current_lidar_token = sample_data["next"]
+
+
+def main() -> None:
+ parser = argparse.ArgumentParser(description="Visualizes lidar scans using the Rerun SDK.")
+ parser.add_argument(
+ "--root_dir",
+ type=pathlib.Path,
+ default=DATASET_DIR,
+ help="Root directory of nuScenes dataset",
+ )
+ parser.add_argument(
+ "--scene_name",
+ type=str,
+ default="scene-0061",
+ help="Scene name to visualize (typically of form 'scene-xxxx')",
+ )
+ parser.add_argument("--dataset_version", type=str, default="v1.0-mini", help="Scene id to visualize")
+ rr.script_add_args(parser)
+ args = parser.parse_args()
+
+ ensure_scene_available(args.root_dir, args.dataset_version, args.scene_name)
+
+ rr.script_setup(args, "rerun_example_lidar")
+ log_nuscenes_lidar(args.root_dir, args.dataset_version, args.scene_name)
+
+ rr.script_teardown(args)
+
+
+if __name__ == "__main__":
+ main()
diff --git a/examples/python/lidar/requirements.txt b/examples/python/lidar/requirements.txt
new file mode 100644
index 000000000000..9ddcccf2ce52
--- /dev/null
+++ b/examples/python/lidar/requirements.txt
@@ -0,0 +1,4 @@
+matplotlib
+numpy
+nuscenes-devkit
+rerun-sdk
diff --git a/examples/python/nuscenes/.gitignore b/examples/python/nuscenes/.gitignore
new file mode 100644
index 000000000000..d1ac3a94954e
--- /dev/null
+++ b/examples/python/nuscenes/.gitignore
@@ -0,0 +1 @@
+dataset/**
diff --git a/examples/python/nuscenes/README.md b/examples/python/nuscenes/README.md
new file mode 100644
index 000000000000..ad1a7b6d4e5c
--- /dev/null
+++ b/examples/python/nuscenes/README.md
@@ -0,0 +1,24 @@
+---
+title: nuScenes
+python: https://github.com/rerun-io/rerun/blob/latest/examples/python/nuscenes/main.py?speculative-link
+tags: [lidar, 3D, 2D, object-detection, pinhole-camera]
+description: "Visualize the nuScenes dataset including lidar, radar, images, and bounding boxes."
+thumbnail: https://static.rerun.io/nuscenes/64a50a9d67cbb69ae872551989ee807b195f6b5d/480w.png
+thumbnail_dimensions: [480, 282]
+---
+
+
+
+
+
+
+
+
+
+This example visualizes only the lidar data from the [nuScenes dataset](https://www.nuscenes.org/) using Rerun. For a moe extensive example including other sensors and annotations check out the [nuScenes example](https://www.rerun.io/examples/real-data/nuscenes?speculative-link).
+
+```bash
+pip install -r examples/python/lidar/requirements.txt
+python examples/python/lidar/main.py
+```
diff --git a/examples/python/lidar/dataset b/examples/python/lidar/dataset
new file mode 120000
index 000000000000..407167dd09c5
--- /dev/null
+++ b/examples/python/lidar/dataset
@@ -0,0 +1 @@
+../nuscenes/dataset
\ No newline at end of file
diff --git a/examples/python/lidar/download_dataset.py b/examples/python/lidar/download_dataset.py
new file mode 100644
index 000000000000..fbb384643ffe
--- /dev/null
+++ b/examples/python/lidar/download_dataset.py
@@ -0,0 +1,65 @@
+"""Module to download nuScenes minisplit."""
+from __future__ import annotations
+
+import os
+import pathlib
+import tarfile
+
+import requests
+import tqdm
+
+MINISPLIT_SCENES = [
+ "scene-0061",
+ "scene-0103",
+ "scene-0553",
+ "scene-0655",
+ "scene-0757",
+ "scene-0796",
+ "scene-0916",
+ "scene-1077",
+ "scene-1094",
+ "scene-1100",
+]
+MINISPLIT_URL = "https://www.nuscenes.org/data/v1.0-mini.tgz"
+
+
+def download_file(url: str, dst_file_path: pathlib.Path) -> None:
+ """Download file from url to dst_fpath."""
+ dst_file_path.parent.mkdir(parents=True, exist_ok=True)
+ print(f"Downloading {url} to {dst_file_path}")
+ response = requests.get(url, stream=True)
+ with tqdm.tqdm.wrapattr(
+ open(dst_file_path, "wb"),
+ "write",
+ miniters=1,
+ total=int(response.headers.get("content-length", 0)),
+ desc=f"Downloading {dst_file_path.name}",
+ ) as f:
+ for chunk in response.iter_content(chunk_size=4096):
+ f.write(chunk)
+
+
+def untar_file(tar_file_path: pathlib.Path, dst_path: pathlib.Path, keep_tar: bool = True) -> bool:
+ """Untar tar file at tar_file_path to dst."""
+ print(f"Untar file {tar_file_path}")
+ try:
+ with tarfile.open(tar_file_path, "r") as tf:
+ tf.extractall(dst_path)
+ except Exception as error:
+ print(f"Error unzipping {tar_file_path}, error: {error}")
+ return False
+ if not keep_tar:
+ os.remove(tar_file_path)
+ return True
+
+
+def download_minisplit(root_dir: pathlib.Path) -> None:
+ """
+ Download nuScenes minisplit.
+
+ Adopted from https://colab.research.google.com/github/nutonomy/nuscenes-devkit/blob/master/python-sdk/tutorials/nuscenes_tutorial.ipynb
+ """
+ zip_file_path = pathlib.Path("./v1.0-mini.tgz")
+ if not zip_file_path.is_file():
+ download_file(MINISPLIT_URL, zip_file_path)
+ untar_file(zip_file_path, root_dir, keep_tar=True)
diff --git a/examples/python/lidar/main.py b/examples/python/lidar/main.py
new file mode 100755
index 000000000000..17751652f700
--- /dev/null
+++ b/examples/python/lidar/main.py
@@ -0,0 +1,102 @@
+#!/usr/bin/env python3
+from __future__ import annotations
+
+import argparse
+import os
+import pathlib
+from typing import Final
+
+import matplotlib
+import numpy as np
+import rerun as rr
+from download_dataset import MINISPLIT_SCENES, download_minisplit
+from nuscenes import nuscenes
+
+EXAMPLE_DIR: Final = pathlib.Path(os.path.dirname(__file__))
+DATASET_DIR: Final = EXAMPLE_DIR / "dataset"
+
+# currently need to calculate the color manually
+# see https://github.com/rerun-io/rerun/issues/4409
+cmap = matplotlib.colormaps["turbo_r"]
+norm = matplotlib.colors.Normalize(
+ vmin=3.0,
+ vmax=75.0,
+)
+
+
+def ensure_scene_available(root_dir: pathlib.Path, dataset_version: str, scene_name: str) -> None:
+ """
+ Ensure that the specified scene is available.
+
+ Downloads minisplit into root_dir if scene_name is part of it and root_dir is empty.
+
+ Raises ValueError if scene is not available and cannot be downloaded.
+ """
+ try:
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+ except AssertionError: # dataset initialization failed
+ if dataset_version == "v1.0-mini" and scene_name in MINISPLIT_SCENES:
+ download_minisplit(root_dir)
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+ else:
+ print(f"Could not find dataset at {root_dir} and could not automatically download specified scene.")
+ exit()
+
+ scene_names = [s["name"] for s in nusc.scene]
+ if scene_name not in scene_names:
+ raise ValueError(f"{scene_name=} not found in dataset")
+
+
+def log_nuscenes_lidar(root_dir: pathlib.Path, dataset_version: str, scene_name: str) -> None:
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+
+ scene = next(s for s in nusc.scene if s["name"] == scene_name)
+
+ rr.log("world", rr.ViewCoordinates.RIGHT_HAND_Z_UP, timeless=True)
+
+ first_sample = nusc.get("sample", scene["first_sample_token"])
+ current_lidar_token = first_sample["data"]["LIDAR_TOP"]
+ while current_lidar_token != "":
+ sample_data = nusc.get("sample_data", current_lidar_token)
+
+ data_file_path = nusc.dataroot / sample_data["filename"]
+ pointcloud = nuscenes.LidarPointCloud.from_file(str(data_file_path))
+ points = pointcloud.points[:3].T # shape after transposing: (num_points, 3)
+ point_distances = np.linalg.norm(points, axis=1)
+ point_colors = cmap(norm(point_distances))
+
+ # timestamps are in microseconds
+ rr.set_time_seconds("timestamp", sample_data["timestamp"] * 1e-6)
+ rr.log("world/lidar", rr.Points3D(points, colors=point_colors))
+
+ current_lidar_token = sample_data["next"]
+
+
+def main() -> None:
+ parser = argparse.ArgumentParser(description="Visualizes lidar scans using the Rerun SDK.")
+ parser.add_argument(
+ "--root_dir",
+ type=pathlib.Path,
+ default=DATASET_DIR,
+ help="Root directory of nuScenes dataset",
+ )
+ parser.add_argument(
+ "--scene_name",
+ type=str,
+ default="scene-0061",
+ help="Scene name to visualize (typically of form 'scene-xxxx')",
+ )
+ parser.add_argument("--dataset_version", type=str, default="v1.0-mini", help="Scene id to visualize")
+ rr.script_add_args(parser)
+ args = parser.parse_args()
+
+ ensure_scene_available(args.root_dir, args.dataset_version, args.scene_name)
+
+ rr.script_setup(args, "rerun_example_lidar")
+ log_nuscenes_lidar(args.root_dir, args.dataset_version, args.scene_name)
+
+ rr.script_teardown(args)
+
+
+if __name__ == "__main__":
+ main()
diff --git a/examples/python/lidar/requirements.txt b/examples/python/lidar/requirements.txt
new file mode 100644
index 000000000000..9ddcccf2ce52
--- /dev/null
+++ b/examples/python/lidar/requirements.txt
@@ -0,0 +1,4 @@
+matplotlib
+numpy
+nuscenes-devkit
+rerun-sdk
diff --git a/examples/python/nuscenes/.gitignore b/examples/python/nuscenes/.gitignore
new file mode 100644
index 000000000000..d1ac3a94954e
--- /dev/null
+++ b/examples/python/nuscenes/.gitignore
@@ -0,0 +1 @@
+dataset/**
diff --git a/examples/python/nuscenes/README.md b/examples/python/nuscenes/README.md
new file mode 100644
index 000000000000..ad1a7b6d4e5c
--- /dev/null
+++ b/examples/python/nuscenes/README.md
@@ -0,0 +1,24 @@
+---
+title: nuScenes
+python: https://github.com/rerun-io/rerun/blob/latest/examples/python/nuscenes/main.py?speculative-link
+tags: [lidar, 3D, 2D, object-detection, pinhole-camera]
+description: "Visualize the nuScenes dataset including lidar, radar, images, and bounding boxes."
+thumbnail: https://static.rerun.io/nuscenes/64a50a9d67cbb69ae872551989ee807b195f6b5d/480w.png
+thumbnail_dimensions: [480, 282]
+---
+
+
+  +
+
+
+
+
+
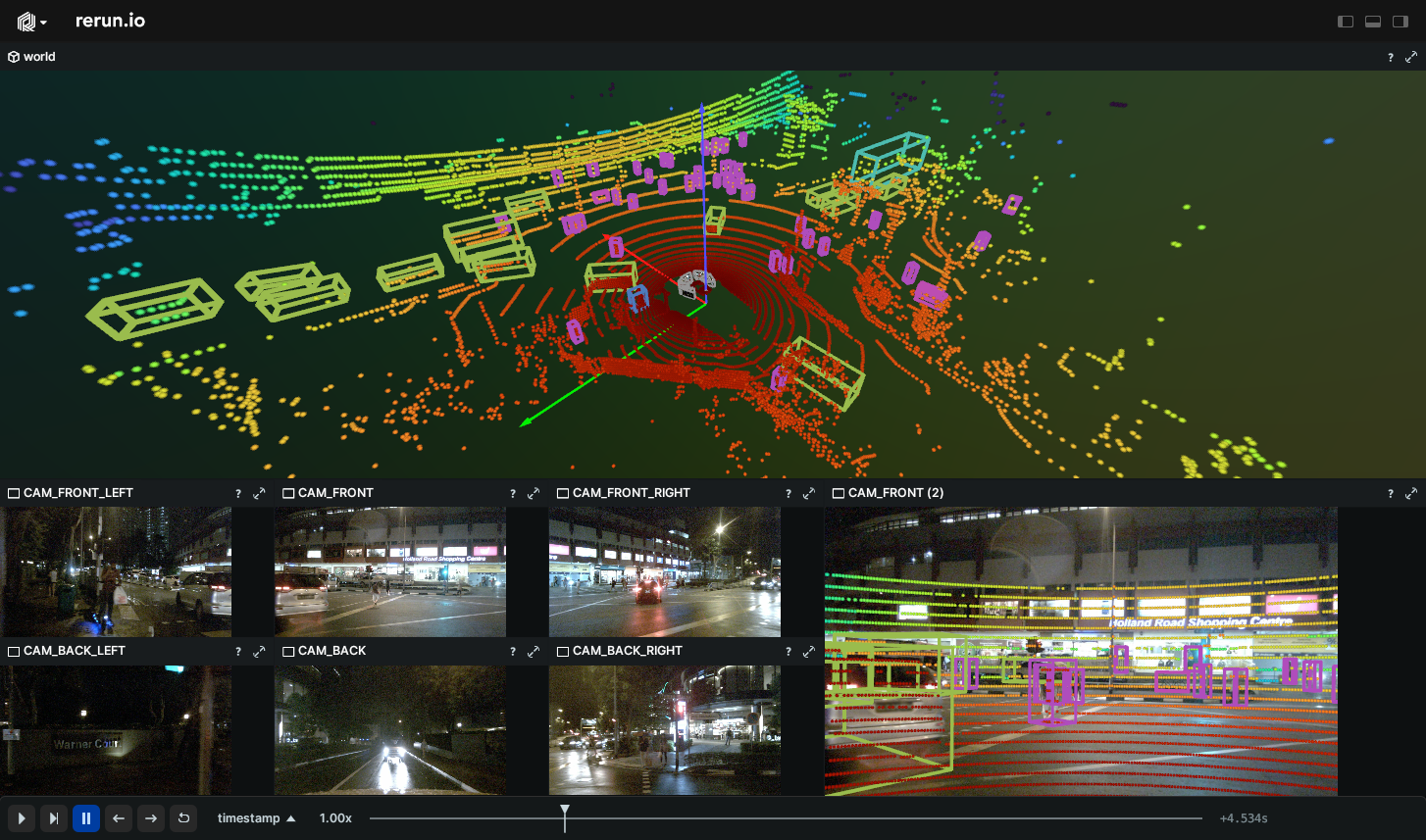
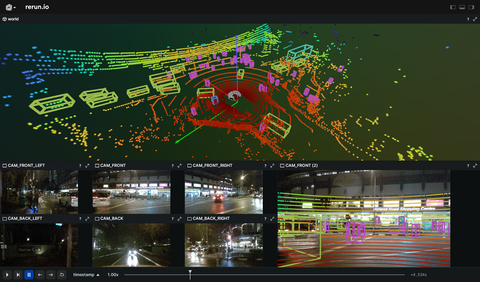
+This example visualizes the [nuScenes dataset](https://www.nuscenes.org/) using Rerun. The dataset
+contains lidar data, radar data, color images, and labeled bounding boxes.
+
+```bash
+pip install -r examples/python/nuscenes/requirements.txt
+python examples/python/nuscenes/main.py
+```
diff --git a/examples/python/nuscenes/download_dataset.py b/examples/python/nuscenes/download_dataset.py
new file mode 100644
index 000000000000..fbb384643ffe
--- /dev/null
+++ b/examples/python/nuscenes/download_dataset.py
@@ -0,0 +1,65 @@
+"""Module to download nuScenes minisplit."""
+from __future__ import annotations
+
+import os
+import pathlib
+import tarfile
+
+import requests
+import tqdm
+
+MINISPLIT_SCENES = [
+ "scene-0061",
+ "scene-0103",
+ "scene-0553",
+ "scene-0655",
+ "scene-0757",
+ "scene-0796",
+ "scene-0916",
+ "scene-1077",
+ "scene-1094",
+ "scene-1100",
+]
+MINISPLIT_URL = "https://www.nuscenes.org/data/v1.0-mini.tgz"
+
+
+def download_file(url: str, dst_file_path: pathlib.Path) -> None:
+ """Download file from url to dst_fpath."""
+ dst_file_path.parent.mkdir(parents=True, exist_ok=True)
+ print(f"Downloading {url} to {dst_file_path}")
+ response = requests.get(url, stream=True)
+ with tqdm.tqdm.wrapattr(
+ open(dst_file_path, "wb"),
+ "write",
+ miniters=1,
+ total=int(response.headers.get("content-length", 0)),
+ desc=f"Downloading {dst_file_path.name}",
+ ) as f:
+ for chunk in response.iter_content(chunk_size=4096):
+ f.write(chunk)
+
+
+def untar_file(tar_file_path: pathlib.Path, dst_path: pathlib.Path, keep_tar: bool = True) -> bool:
+ """Untar tar file at tar_file_path to dst."""
+ print(f"Untar file {tar_file_path}")
+ try:
+ with tarfile.open(tar_file_path, "r") as tf:
+ tf.extractall(dst_path)
+ except Exception as error:
+ print(f"Error unzipping {tar_file_path}, error: {error}")
+ return False
+ if not keep_tar:
+ os.remove(tar_file_path)
+ return True
+
+
+def download_minisplit(root_dir: pathlib.Path) -> None:
+ """
+ Download nuScenes minisplit.
+
+ Adopted from https://colab.research.google.com/github/nutonomy/nuscenes-devkit/blob/master/python-sdk/tutorials/nuscenes_tutorial.ipynb
+ """
+ zip_file_path = pathlib.Path("./v1.0-mini.tgz")
+ if not zip_file_path.is_file():
+ download_file(MINISPLIT_URL, zip_file_path)
+ untar_file(zip_file_path, root_dir, keep_tar=True)
diff --git a/examples/python/nuscenes/main.py b/examples/python/nuscenes/main.py
new file mode 100755
index 000000000000..d8e489358979
--- /dev/null
+++ b/examples/python/nuscenes/main.py
@@ -0,0 +1,228 @@
+#!/usr/bin/env python3
+from __future__ import annotations
+
+import argparse
+import os
+import pathlib
+from typing import Any, Final
+
+import matplotlib
+import numpy as np
+import rerun as rr
+from download_dataset import MINISPLIT_SCENES, download_minisplit
+from nuscenes import nuscenes
+
+EXAMPLE_DIR: Final = pathlib.Path(os.path.dirname(__file__))
+DATASET_DIR: Final = EXAMPLE_DIR / "dataset"
+
+# currently need to calculate the color manually
+# see https://github.com/rerun-io/rerun/issues/4409
+cmap = matplotlib.colormaps["turbo_r"]
+norm = matplotlib.colors.Normalize(
+ vmin=3.0,
+ vmax=75.0,
+)
+
+
+def ensure_scene_available(root_dir: pathlib.Path, dataset_version: str, scene_name: str) -> None:
+ """
+ Ensure that the specified scene is available.
+
+ Downloads minisplit into root_dir if scene_name is part of it and root_dir is empty.
+
+ Raises ValueError if scene is not available and cannot be downloaded.
+ """
+ try:
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+ except AssertionError: # dataset initialization failed
+ if dataset_version == "v1.0-mini" and scene_name in MINISPLIT_SCENES:
+ download_minisplit(root_dir)
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+ else:
+ print(f"Could not find dataset at {root_dir} and could not automatically download specified scene.")
+ exit()
+
+ scene_names = [s["name"] for s in nusc.scene]
+ if scene_name not in scene_names:
+ raise ValueError(f"{scene_name=} not found in dataset")
+
+
+def log_nuscenes(root_dir: pathlib.Path, dataset_version: str, scene_name: str) -> None:
+ """Log nuScenes scene."""
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+
+ scene = next(s for s in nusc.scene if s["name"] == scene_name)
+
+ rr.log("world", rr.ViewCoordinates.RIGHT_HAND_Z_UP, timeless=True)
+
+ first_sample_token = scene["first_sample_token"]
+ first_sample = nusc.get("sample", scene["first_sample_token"])
+
+ first_lidar_token = ""
+ first_radar_tokens = []
+ first_camera_tokens = []
+ for sample_data_token in first_sample["data"].values():
+ sample_data = nusc.get("sample_data", sample_data_token)
+ log_sensor_calibration(sample_data, nusc)
+
+ if sample_data["sensor_modality"] == "lidar":
+ first_lidar_token = sample_data_token
+ elif sample_data["sensor_modality"] == "radar":
+ first_radar_tokens.append(sample_data_token)
+ elif sample_data["sensor_modality"] == "camera":
+ first_camera_tokens.append(sample_data_token)
+
+ log_lidar_and_ego_pose(first_lidar_token, nusc)
+ log_cameras(first_camera_tokens, nusc)
+ log_radars(first_radar_tokens, nusc)
+ log_annotations(first_sample_token, nusc)
+
+
+def log_lidar_and_ego_pose(first_lidar_token: str, nusc: nuscenes.NuScenes) -> None:
+ """Log lidar data and vehicle pose."""
+ current_lidar_token = first_lidar_token
+
+ while current_lidar_token != "":
+ sample_data = nusc.get("sample_data", current_lidar_token)
+ sensor_name = sample_data["channel"]
+
+ # timestamps are in microseconds
+ rr.set_time_seconds("timestamp", sample_data["timestamp"] * 1e-6)
+
+ ego_pose = nusc.get("ego_pose", sample_data["ego_pose_token"])
+ rotation_xyzw = np.roll(ego_pose["rotation"], shift=-1) # go from wxyz to xyzw
+ rr.log(
+ "world/ego_vehicle",
+ rr.Transform3D(
+ translation=ego_pose["translation"],
+ rotation=rr.Quaternion(xyzw=rotation_xyzw),
+ from_parent=False,
+ ),
+ )
+ current_lidar_token = sample_data["next"]
+
+ data_file_path = nusc.dataroot / sample_data["filename"]
+ pointcloud = nuscenes.LidarPointCloud.from_file(str(data_file_path))
+ points = pointcloud.points[:3].T # shape after transposing: (num_points, 3)
+ point_distances = np.linalg.norm(points, axis=1)
+ point_colors = cmap(norm(point_distances))
+ rr.log(f"world/ego_vehicle/{sensor_name}", rr.Points3D(points, colors=point_colors))
+
+
+def log_cameras(first_camera_tokens: list[str], nusc: nuscenes.NuScenes) -> None:
+ """Log camera data."""
+ for first_camera_token in first_camera_tokens:
+ current_camera_token = first_camera_token
+ while current_camera_token != "":
+ sample_data = nusc.get("sample_data", current_camera_token)
+ sensor_name = sample_data["channel"]
+ rr.set_time_seconds("timestamp", sample_data["timestamp"] * 1e-6)
+ data_file_path = nusc.dataroot / sample_data["filename"]
+ rr.log(f"world/ego_vehicle/{sensor_name}", rr.ImageEncoded(path=data_file_path))
+ current_camera_token = sample_data["next"]
+
+
+def log_radars(first_radar_tokens: list[str], nusc: nuscenes.NuScenes) -> None:
+ """Log radar data."""
+ for first_radar_token in first_radar_tokens:
+ current_camera_token = first_radar_token
+ while current_camera_token != "":
+ sample_data = nusc.get("sample_data", current_camera_token)
+ sensor_name = sample_data["channel"]
+ rr.set_time_seconds("timestamp", sample_data["timestamp"] * 1e-6)
+ data_file_path = nusc.dataroot / sample_data["filename"]
+ pointcloud = nuscenes.RadarPointCloud.from_file(str(data_file_path))
+ points = pointcloud.points[:3].T # shape after transposing: (num_points, 3)
+ point_distances = np.linalg.norm(points, axis=1)
+ point_colors = cmap(norm(point_distances))
+ rr.log(f"world/ego_vehicle/{sensor_name}", rr.Points3D(points, colors=point_colors))
+ current_camera_token = sample_data["next"]
+
+
+def log_annotations(first_sample_token: str, nusc: nuscenes.NuScenes) -> None:
+ """Log 3D bounding boxes."""
+ label2id: dict[str, int] = {}
+ current_sample_token = first_sample_token
+ while current_sample_token != "":
+ sample = nusc.get("sample", current_sample_token)
+ rr.set_time_seconds("timestamp", sample["timestamp"] * 1e-6)
+ ann_tokens = sample["anns"]
+ sizes = []
+ centers = []
+ rotations = []
+ class_ids = []
+ for ann_token in ann_tokens:
+ ann = nusc.get("sample_annotation", ann_token)
+
+ rotation_xyzw = np.roll(ann["rotation"], shift=-1) # go from wxyz to xyzw
+ width, length, height = ann["size"]
+ sizes.append((length, width, height)) # x, y, z sizes
+ centers.append(ann["translation"])
+ rotations.append(rr.Quaternion(xyzw=rotation_xyzw))
+ if ann["category_name"] not in label2id:
+ label2id[ann["category_name"]] = len(label2id)
+ class_ids.append(label2id[ann["category_name"]])
+
+ rr.log("world/anns", rr.Boxes3D(sizes=sizes, centers=centers, rotations=rotations, class_ids=class_ids))
+ current_sample_token = sample["next"]
+
+ # skipping for now since labels take too much space in 3D view (see https://github.com/rerun-io/rerun/issues/4451)
+ # annotation_context = [(i, label) for label, i in label2id.items()]
+ # rr.log("world/anns", rr.AnnotationContext(annotation_context), timeless=True)
+
+
+def log_sensor_calibration(sample_data: dict[str, Any], nusc: nuscenes.NuScenes) -> None:
+ """Log sensor calibration (pinhole camera, sensor poses, etc.)."""
+ sensor_name = sample_data["channel"]
+ calibrated_sensor_token = sample_data["calibrated_sensor_token"]
+ calibrated_sensor = nusc.get("calibrated_sensor", calibrated_sensor_token)
+ rotation_xyzw = np.roll(calibrated_sensor["rotation"], shift=-1) # go from wxyz to xyzw
+ rr.log(
+ f"world/ego_vehicle/{sensor_name}",
+ rr.Transform3D(
+ translation=calibrated_sensor["translation"],
+ rotation=rr.Quaternion(xyzw=rotation_xyzw),
+ from_parent=False,
+ ),
+ timeless=True,
+ )
+ if len(calibrated_sensor["camera_intrinsic"]) != 0:
+ rr.log(
+ f"world/ego_vehicle/{sensor_name}",
+ rr.Pinhole(
+ image_from_camera=calibrated_sensor["camera_intrinsic"],
+ width=sample_data["width"],
+ height=sample_data["height"],
+ ),
+ timeless=True,
+ )
+
+
+def main() -> None:
+ parser = argparse.ArgumentParser(description="Visualizes the nuScenes dataset using the Rerun SDK.")
+ parser.add_argument(
+ "--root_dir",
+ type=pathlib.Path,
+ default=DATASET_DIR,
+ help="Root directory of nuScenes dataset",
+ )
+ parser.add_argument(
+ "--scene_name",
+ type=str,
+ default="scene-0061",
+ help="Scene name to visualize (typically of form 'scene-xxxx')",
+ )
+ parser.add_argument("--dataset_version", type=str, default="v1.0-mini", help="Scene id to visualize")
+ rr.script_add_args(parser)
+ args = parser.parse_args()
+
+ ensure_scene_available(args.root_dir, args.dataset_version, args.scene_name)
+
+ rr.script_setup(args, "rerun_example_nuscenes")
+ log_nuscenes(args.root_dir, args.dataset_version, args.scene_name)
+
+ rr.script_teardown(args)
+
+
+if __name__ == "__main__":
+ main()
diff --git a/examples/python/nuscenes/requirements.txt b/examples/python/nuscenes/requirements.txt
new file mode 100644
index 000000000000..9ddcccf2ce52
--- /dev/null
+++ b/examples/python/nuscenes/requirements.txt
@@ -0,0 +1,4 @@
+matplotlib
+numpy
+nuscenes-devkit
+rerun-sdk
diff --git a/examples/python/requirements.txt b/examples/python/requirements.txt
index 278767cbce1d..5be4a3853cc8 100644
--- a/examples/python/requirements.txt
+++ b/examples/python/requirements.txt
@@ -9,6 +9,7 @@
-r dna/requirements.txt
-r face_tracking/requirements.txt
-r human_pose_tracking/requirements.txt
+-r lidar/requirements.txt
-r live_camera_edge_detection/requirements.txt
-r live_depth_sensor/requirements.txt
-r minimal/requirements.txt
@@ -16,6 +17,7 @@
-r multiprocessing/requirements.txt
-r multithreading/requirements.txt
-r notebook/requirements.txt
+-r nuscenes/requirements.txt
-r nv12/requirements.txt
-r objectron/requirements.txt
-r open_photogrammetry_format/requirements.txt
+
+
+
+
+
+
+This example visualizes the [nuScenes dataset](https://www.nuscenes.org/) using Rerun. The dataset
+contains lidar data, radar data, color images, and labeled bounding boxes.
+
+```bash
+pip install -r examples/python/nuscenes/requirements.txt
+python examples/python/nuscenes/main.py
+```
diff --git a/examples/python/nuscenes/download_dataset.py b/examples/python/nuscenes/download_dataset.py
new file mode 100644
index 000000000000..fbb384643ffe
--- /dev/null
+++ b/examples/python/nuscenes/download_dataset.py
@@ -0,0 +1,65 @@
+"""Module to download nuScenes minisplit."""
+from __future__ import annotations
+
+import os
+import pathlib
+import tarfile
+
+import requests
+import tqdm
+
+MINISPLIT_SCENES = [
+ "scene-0061",
+ "scene-0103",
+ "scene-0553",
+ "scene-0655",
+ "scene-0757",
+ "scene-0796",
+ "scene-0916",
+ "scene-1077",
+ "scene-1094",
+ "scene-1100",
+]
+MINISPLIT_URL = "https://www.nuscenes.org/data/v1.0-mini.tgz"
+
+
+def download_file(url: str, dst_file_path: pathlib.Path) -> None:
+ """Download file from url to dst_fpath."""
+ dst_file_path.parent.mkdir(parents=True, exist_ok=True)
+ print(f"Downloading {url} to {dst_file_path}")
+ response = requests.get(url, stream=True)
+ with tqdm.tqdm.wrapattr(
+ open(dst_file_path, "wb"),
+ "write",
+ miniters=1,
+ total=int(response.headers.get("content-length", 0)),
+ desc=f"Downloading {dst_file_path.name}",
+ ) as f:
+ for chunk in response.iter_content(chunk_size=4096):
+ f.write(chunk)
+
+
+def untar_file(tar_file_path: pathlib.Path, dst_path: pathlib.Path, keep_tar: bool = True) -> bool:
+ """Untar tar file at tar_file_path to dst."""
+ print(f"Untar file {tar_file_path}")
+ try:
+ with tarfile.open(tar_file_path, "r") as tf:
+ tf.extractall(dst_path)
+ except Exception as error:
+ print(f"Error unzipping {tar_file_path}, error: {error}")
+ return False
+ if not keep_tar:
+ os.remove(tar_file_path)
+ return True
+
+
+def download_minisplit(root_dir: pathlib.Path) -> None:
+ """
+ Download nuScenes minisplit.
+
+ Adopted from https://colab.research.google.com/github/nutonomy/nuscenes-devkit/blob/master/python-sdk/tutorials/nuscenes_tutorial.ipynb
+ """
+ zip_file_path = pathlib.Path("./v1.0-mini.tgz")
+ if not zip_file_path.is_file():
+ download_file(MINISPLIT_URL, zip_file_path)
+ untar_file(zip_file_path, root_dir, keep_tar=True)
diff --git a/examples/python/nuscenes/main.py b/examples/python/nuscenes/main.py
new file mode 100755
index 000000000000..d8e489358979
--- /dev/null
+++ b/examples/python/nuscenes/main.py
@@ -0,0 +1,228 @@
+#!/usr/bin/env python3
+from __future__ import annotations
+
+import argparse
+import os
+import pathlib
+from typing import Any, Final
+
+import matplotlib
+import numpy as np
+import rerun as rr
+from download_dataset import MINISPLIT_SCENES, download_minisplit
+from nuscenes import nuscenes
+
+EXAMPLE_DIR: Final = pathlib.Path(os.path.dirname(__file__))
+DATASET_DIR: Final = EXAMPLE_DIR / "dataset"
+
+# currently need to calculate the color manually
+# see https://github.com/rerun-io/rerun/issues/4409
+cmap = matplotlib.colormaps["turbo_r"]
+norm = matplotlib.colors.Normalize(
+ vmin=3.0,
+ vmax=75.0,
+)
+
+
+def ensure_scene_available(root_dir: pathlib.Path, dataset_version: str, scene_name: str) -> None:
+ """
+ Ensure that the specified scene is available.
+
+ Downloads minisplit into root_dir if scene_name is part of it and root_dir is empty.
+
+ Raises ValueError if scene is not available and cannot be downloaded.
+ """
+ try:
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+ except AssertionError: # dataset initialization failed
+ if dataset_version == "v1.0-mini" and scene_name in MINISPLIT_SCENES:
+ download_minisplit(root_dir)
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+ else:
+ print(f"Could not find dataset at {root_dir} and could not automatically download specified scene.")
+ exit()
+
+ scene_names = [s["name"] for s in nusc.scene]
+ if scene_name not in scene_names:
+ raise ValueError(f"{scene_name=} not found in dataset")
+
+
+def log_nuscenes(root_dir: pathlib.Path, dataset_version: str, scene_name: str) -> None:
+ """Log nuScenes scene."""
+ nusc = nuscenes.NuScenes(version=dataset_version, dataroot=root_dir, verbose=True)
+
+ scene = next(s for s in nusc.scene if s["name"] == scene_name)
+
+ rr.log("world", rr.ViewCoordinates.RIGHT_HAND_Z_UP, timeless=True)
+
+ first_sample_token = scene["first_sample_token"]
+ first_sample = nusc.get("sample", scene["first_sample_token"])
+
+ first_lidar_token = ""
+ first_radar_tokens = []
+ first_camera_tokens = []
+ for sample_data_token in first_sample["data"].values():
+ sample_data = nusc.get("sample_data", sample_data_token)
+ log_sensor_calibration(sample_data, nusc)
+
+ if sample_data["sensor_modality"] == "lidar":
+ first_lidar_token = sample_data_token
+ elif sample_data["sensor_modality"] == "radar":
+ first_radar_tokens.append(sample_data_token)
+ elif sample_data["sensor_modality"] == "camera":
+ first_camera_tokens.append(sample_data_token)
+
+ log_lidar_and_ego_pose(first_lidar_token, nusc)
+ log_cameras(first_camera_tokens, nusc)
+ log_radars(first_radar_tokens, nusc)
+ log_annotations(first_sample_token, nusc)
+
+
+def log_lidar_and_ego_pose(first_lidar_token: str, nusc: nuscenes.NuScenes) -> None:
+ """Log lidar data and vehicle pose."""
+ current_lidar_token = first_lidar_token
+
+ while current_lidar_token != "":
+ sample_data = nusc.get("sample_data", current_lidar_token)
+ sensor_name = sample_data["channel"]
+
+ # timestamps are in microseconds
+ rr.set_time_seconds("timestamp", sample_data["timestamp"] * 1e-6)
+
+ ego_pose = nusc.get("ego_pose", sample_data["ego_pose_token"])
+ rotation_xyzw = np.roll(ego_pose["rotation"], shift=-1) # go from wxyz to xyzw
+ rr.log(
+ "world/ego_vehicle",
+ rr.Transform3D(
+ translation=ego_pose["translation"],
+ rotation=rr.Quaternion(xyzw=rotation_xyzw),
+ from_parent=False,
+ ),
+ )
+ current_lidar_token = sample_data["next"]
+
+ data_file_path = nusc.dataroot / sample_data["filename"]
+ pointcloud = nuscenes.LidarPointCloud.from_file(str(data_file_path))
+ points = pointcloud.points[:3].T # shape after transposing: (num_points, 3)
+ point_distances = np.linalg.norm(points, axis=1)
+ point_colors = cmap(norm(point_distances))
+ rr.log(f"world/ego_vehicle/{sensor_name}", rr.Points3D(points, colors=point_colors))
+
+
+def log_cameras(first_camera_tokens: list[str], nusc: nuscenes.NuScenes) -> None:
+ """Log camera data."""
+ for first_camera_token in first_camera_tokens:
+ current_camera_token = first_camera_token
+ while current_camera_token != "":
+ sample_data = nusc.get("sample_data", current_camera_token)
+ sensor_name = sample_data["channel"]
+ rr.set_time_seconds("timestamp", sample_data["timestamp"] * 1e-6)
+ data_file_path = nusc.dataroot / sample_data["filename"]
+ rr.log(f"world/ego_vehicle/{sensor_name}", rr.ImageEncoded(path=data_file_path))
+ current_camera_token = sample_data["next"]
+
+
+def log_radars(first_radar_tokens: list[str], nusc: nuscenes.NuScenes) -> None:
+ """Log radar data."""
+ for first_radar_token in first_radar_tokens:
+ current_camera_token = first_radar_token
+ while current_camera_token != "":
+ sample_data = nusc.get("sample_data", current_camera_token)
+ sensor_name = sample_data["channel"]
+ rr.set_time_seconds("timestamp", sample_data["timestamp"] * 1e-6)
+ data_file_path = nusc.dataroot / sample_data["filename"]
+ pointcloud = nuscenes.RadarPointCloud.from_file(str(data_file_path))
+ points = pointcloud.points[:3].T # shape after transposing: (num_points, 3)
+ point_distances = np.linalg.norm(points, axis=1)
+ point_colors = cmap(norm(point_distances))
+ rr.log(f"world/ego_vehicle/{sensor_name}", rr.Points3D(points, colors=point_colors))
+ current_camera_token = sample_data["next"]
+
+
+def log_annotations(first_sample_token: str, nusc: nuscenes.NuScenes) -> None:
+ """Log 3D bounding boxes."""
+ label2id: dict[str, int] = {}
+ current_sample_token = first_sample_token
+ while current_sample_token != "":
+ sample = nusc.get("sample", current_sample_token)
+ rr.set_time_seconds("timestamp", sample["timestamp"] * 1e-6)
+ ann_tokens = sample["anns"]
+ sizes = []
+ centers = []
+ rotations = []
+ class_ids = []
+ for ann_token in ann_tokens:
+ ann = nusc.get("sample_annotation", ann_token)
+
+ rotation_xyzw = np.roll(ann["rotation"], shift=-1) # go from wxyz to xyzw
+ width, length, height = ann["size"]
+ sizes.append((length, width, height)) # x, y, z sizes
+ centers.append(ann["translation"])
+ rotations.append(rr.Quaternion(xyzw=rotation_xyzw))
+ if ann["category_name"] not in label2id:
+ label2id[ann["category_name"]] = len(label2id)
+ class_ids.append(label2id[ann["category_name"]])
+
+ rr.log("world/anns", rr.Boxes3D(sizes=sizes, centers=centers, rotations=rotations, class_ids=class_ids))
+ current_sample_token = sample["next"]
+
+ # skipping for now since labels take too much space in 3D view (see https://github.com/rerun-io/rerun/issues/4451)
+ # annotation_context = [(i, label) for label, i in label2id.items()]
+ # rr.log("world/anns", rr.AnnotationContext(annotation_context), timeless=True)
+
+
+def log_sensor_calibration(sample_data: dict[str, Any], nusc: nuscenes.NuScenes) -> None:
+ """Log sensor calibration (pinhole camera, sensor poses, etc.)."""
+ sensor_name = sample_data["channel"]
+ calibrated_sensor_token = sample_data["calibrated_sensor_token"]
+ calibrated_sensor = nusc.get("calibrated_sensor", calibrated_sensor_token)
+ rotation_xyzw = np.roll(calibrated_sensor["rotation"], shift=-1) # go from wxyz to xyzw
+ rr.log(
+ f"world/ego_vehicle/{sensor_name}",
+ rr.Transform3D(
+ translation=calibrated_sensor["translation"],
+ rotation=rr.Quaternion(xyzw=rotation_xyzw),
+ from_parent=False,
+ ),
+ timeless=True,
+ )
+ if len(calibrated_sensor["camera_intrinsic"]) != 0:
+ rr.log(
+ f"world/ego_vehicle/{sensor_name}",
+ rr.Pinhole(
+ image_from_camera=calibrated_sensor["camera_intrinsic"],
+ width=sample_data["width"],
+ height=sample_data["height"],
+ ),
+ timeless=True,
+ )
+
+
+def main() -> None:
+ parser = argparse.ArgumentParser(description="Visualizes the nuScenes dataset using the Rerun SDK.")
+ parser.add_argument(
+ "--root_dir",
+ type=pathlib.Path,
+ default=DATASET_DIR,
+ help="Root directory of nuScenes dataset",
+ )
+ parser.add_argument(
+ "--scene_name",
+ type=str,
+ default="scene-0061",
+ help="Scene name to visualize (typically of form 'scene-xxxx')",
+ )
+ parser.add_argument("--dataset_version", type=str, default="v1.0-mini", help="Scene id to visualize")
+ rr.script_add_args(parser)
+ args = parser.parse_args()
+
+ ensure_scene_available(args.root_dir, args.dataset_version, args.scene_name)
+
+ rr.script_setup(args, "rerun_example_nuscenes")
+ log_nuscenes(args.root_dir, args.dataset_version, args.scene_name)
+
+ rr.script_teardown(args)
+
+
+if __name__ == "__main__":
+ main()
diff --git a/examples/python/nuscenes/requirements.txt b/examples/python/nuscenes/requirements.txt
new file mode 100644
index 000000000000..9ddcccf2ce52
--- /dev/null
+++ b/examples/python/nuscenes/requirements.txt
@@ -0,0 +1,4 @@
+matplotlib
+numpy
+nuscenes-devkit
+rerun-sdk
diff --git a/examples/python/requirements.txt b/examples/python/requirements.txt
index 278767cbce1d..5be4a3853cc8 100644
--- a/examples/python/requirements.txt
+++ b/examples/python/requirements.txt
@@ -9,6 +9,7 @@
-r dna/requirements.txt
-r face_tracking/requirements.txt
-r human_pose_tracking/requirements.txt
+-r lidar/requirements.txt
-r live_camera_edge_detection/requirements.txt
-r live_depth_sensor/requirements.txt
-r minimal/requirements.txt
@@ -16,6 +17,7 @@
-r multiprocessing/requirements.txt
-r multithreading/requirements.txt
-r notebook/requirements.txt
+-r nuscenes/requirements.txt
-r nv12/requirements.txt
-r objectron/requirements.txt
-r open_photogrammetry_format/requirements.txt
 +
+  +
+