diff --git a/robot/quadruped/go2.md b/robot/quadruped/go2.md
index 2215ad7..cfffd7d 100644
--- a/robot/quadruped/go2.md
+++ b/robot/quadruped/go2.md
@@ -46,6 +46,7 @@ Go2 Edu has 1 built-in computer and 1 onboard computer (expansion dock module):
* **Go2 App, Robot Features, Tutorial Videos, Manuals**: [Go2 Features](https://www.unitree.com/app/go2)
* **Other Information**: [URDF/CAD](https://support.unitree.com/home/en/developer/Obtain%20SDK)
* **Tutorials Page**: [Diagnostic Guide](/tutorial/intro)
+* **Simultaneous Localization and Mapping Guide**: [Unitree SLAM Guide](/software/slam/go2_slam)
## 4. FAQ
diff --git a/sidebars-software.ts b/sidebars-software.ts
index 6fdc681..648af31 100644
--- a/sidebars-software.ts
+++ b/sidebars-software.ts
@@ -17,7 +17,14 @@ const sidebarsSoftware: SidebarsConfig = {
'toolbox/assisted_driving_toolbox',
],
},
+ {
+ type: 'category',
+ label: 'Unitree Slam Guide',
+ items: [
+ 'slam/go2_slam',
+ ],
+ },
],
};
-export default sidebarsSoftware;
\ No newline at end of file
+export default sidebarsSoftware;
diff --git a/software/slam/go2_slam.md b/software/slam/go2_slam.md
new file mode 100644
index 0000000..f98fa3e
--- /dev/null
+++ b/software/slam/go2_slam.md
@@ -0,0 +1,144 @@
+---
+sidebar_position: 1
+---
+
+# Go2 & Go2-W
+
+## 1. Setup
+
+Before jumping into SLAM, ensure that all required configurations are set up on the developer PC.
+
+### 1.1 What You Need
+
+- **User PC** running Ubuntu 20.04 or 22.04
+ - Ubuntu 22.04 is recommended.
+ - A laptop is recommended.
+ - You may refer to the [Ubuntu Installation Guide](https://ubuntu.com/tutorials/install-ubuntu-desktop).
+- **ROS2 Foxy or Humble** installed
+ - Humble is recommended.
+ - You may refer to the [ROS2 Humble Installation Guide](https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html).
+ - After installing ROS2, in the terminal, run **`export ROS_DOMAIN_ID=0`**.
+- **Unitree Software Development Kit** installed and set up
+ - You may refer to the [Unitree_SDK_Go2 Installation Guide](https://support.unitree.com/home/en/developer/Quick_start) or the [Unitree_SDK_Go2-W Installation Guide](https://support.unitree.com/home/en/Go2-W_developer/Quick_Start).
+- **Unitree ROS2 Services Interface** installed
+ - You may refer to the [ROS2 Services Interface Installation Guide](https://support.unitree.com/home/en/developer/ROS2_service).
+- **Ethernet cable**
+ - Used to connect the laptop to the Go2/Go2-W PC.
+ - A cable longer than 5 meters is recommended.
+
+### 1.2 Additional Preparation
+
+- **Payload Installation**
+ - You may refer to the [Payload Installation Guide](https://support.unitree.com/home/en/developer/Payload).
+ - Make sure the Expansion Dock, depth camera, and LiDAR (XT16 or MID-360) are installed properly.
+- **Expansion Dock Configuration**
+ - You may refer to the [Expansion Dock Configuration Guide](https://support.unitree.com/home/en/developer/module_update).
+
+### 1.3 Notes
+
+- The RViz configuration files can be found in the **Expansion Dock Module Update Package** installed in the previous steps.
+- **Go2/Go2-W PC details:**
+ - Username: `unitree`
+ - Password: `123`
+ - IP address: `192.168.123.18`
+- Secure Shell into the robot PC by running **`ssh unitree@192.168.123.18`** in the terminal.
+ - When prompted, enter the password above.
+ - Select **1** when prompted for the ROS version.
+- If you encounter issues when running commands in the terminal, try adding **`sudo`** at the front (e.g. **`sudo nano /etc/default/grub`**).
+- If you are using **ROS2 Humble** instead of **ROS2 Foxy**, replace any references to *Foxy* with *Humble* when following the steps above.
+
+---
+
+## 2. Configuration
+
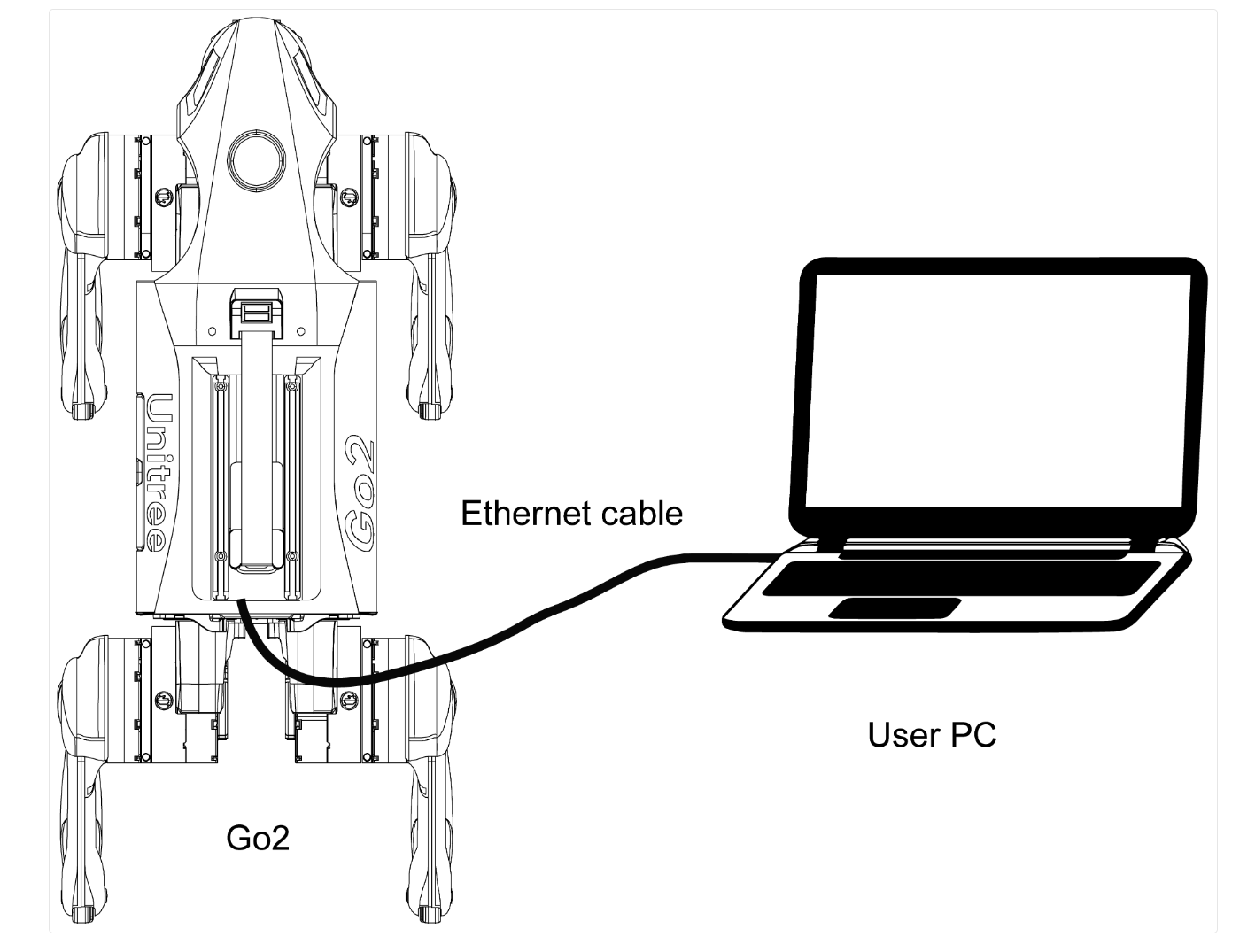
+### 2.1 Wired Connection
+
+- Make sure the User PC is connected to the Expansion Dock on the Go2/Go2-W as shown below.
+
+
+- Ensure that the network interface connected to the robot is configured with the following settings.
+
+
+- In the terminal:
+ - Verify the connection by running:
+ - **`ping 192.168.123.18`** for the Go2/Go2-W PC
+ - **`ping 192.168.123.20`** for the LiDAR
+ - **`ping 192.168.123.161`** for the Motion Control PC
+ - Verify the ROS2 setup by running:
+ - **`source unitree_ros2/setup.sh`**
+ - **`ros2 topic list`**
+ - Expected output:
+ 
+
+---
+
+### 2.2 SLAM Usage
+
+> The following steps are performed on the Go2/Go2-W PC via [Secure Shell](#13-notes).
+
+#### Run SLAM
+- Open a terminal (Terminal 1).
+- **`cd /unitree/module/unitree_slam/bin`**
+- **`sudo ./unitree_slam`** to start the SLAM service.
+- Keep this terminal open.
+
+#### Run the LiDAR Driver
+- Open a new terminal (Terminal 2).
+- **`cd /unitree/module/unitree_slam/bin`**
+- Run the appropriate driver based on the installed LiDAR:
+ - **`sudo ./mid360_driver`** or
+ - **`sudo ./xt16_driver`**
+- Keep this terminal open.
+
+#### Run keyDemo
+- Open a new terminal (Terminal 3).
+- **`cd /unitree/module/unitree_slam/bin`**
+- **`sudo ./keyDemo eth0`**
+- The terminal should display the following output:
+
+
+---
+
+> The following steps are performed on the **User PC**.
+
+#### Run RViz
+- Open a terminal.
+- **`source unitree_ros2/setup.sh`**
+- **`cd /unitree/module/unitree_slam/rviz2/`**
+- **`rviz2 -d mapping.rviz`**
+- This allows monitoring of the mapping process.
+- You may also run **`rviz2 -d relocation.rviz`** to monitor the relocation process.
+
+---
+
+> The following steps involve robot manipulation using the RC (remote controller) and interaction with Terminal 3.
+
+#### Mapping
+- Press **Q** to start mapping.
+- Make sure the robot is at the exact intended start location and is standing.
+- Move the robot around the area slowly and thoroughly. Repeat this process twice to achieve a more detailed and accurate map.
+- On Terminal 3, press **W** to stop mapping.
+- Return the robot to the exact position and orientation of the original start location.
+
+#### Relocation and Positioning
+- On Terminal 3, press **A** to start relocation and positioning initialization.
+- Press **S** to add the first node (checkpoint), which should always be the start location.
+- Move the robot to desired checkpoints using the RC and save each position by pressing **S**.
+- **Note:**
+ - The distance between the target point and the current position must not exceed 10 meters.
+ - The minimum distance between each node is recommended to be less than 1.5 meters.
+ - The robot moves in a straight line.
+ - Due to the LiDAR field of view, obstacles should be at least 20 cm high.
+ - Avoid sharp turns.
+ - Turn off the obstacle avoidance mode that comes with the robot, and the head light will turn blue.
+- After saving all desired nodes, press any other key in Terminal 3 to exit SLAM navigation mode.
+
+#### Localization
+- Return the robot to the exact position and orientation of the original start location.
+- Review the map and relocation process on the User PC.
+- On Terminal 3, press **A** to localize.
+- Press **D** to start the navigation loop.
+- After completing all saved nodes, the robot will return to the original start location.
+- **Note:**
+ - To pause navigation, press **Z** on Terminal 3, then press **CTRL+C** on all terminals.
+ - Using the RC will immediately stop SLAM navigation and takes precedence.
diff --git a/software/slam/img/terminal_output.png b/software/slam/img/terminal_output.png
new file mode 100644
index 0000000..fccefc3
Binary files /dev/null and b/software/slam/img/terminal_output.png differ
diff --git a/software/slam/img/wired_connection.png b/software/slam/img/wired_connection.png
new file mode 100644
index 0000000..1d59d14
Binary files /dev/null and b/software/slam/img/wired_connection.png differ
diff --git a/tutorial/intro.md b/tutorial/intro.md
index 8fdfca6..9cee8d5 100644
--- a/tutorial/intro.md
+++ b/tutorial/intro.md
@@ -20,3 +20,4 @@ In addition to the resource provided on the product pages, we also prepare more
* [Go2 Diagnostics Guide](unitree/go2_diag_guide)
* [B2 Diagnostics Guide](unitree/b2_diag_guide)
+* [Go2 & Go2-W Unitree SLAM Guide](/software/slam/go2_slam)