



RF-DETR is a real-time, transformer-based object detection model architecture developed by Roboflow and released under the Apache 2.0 license.
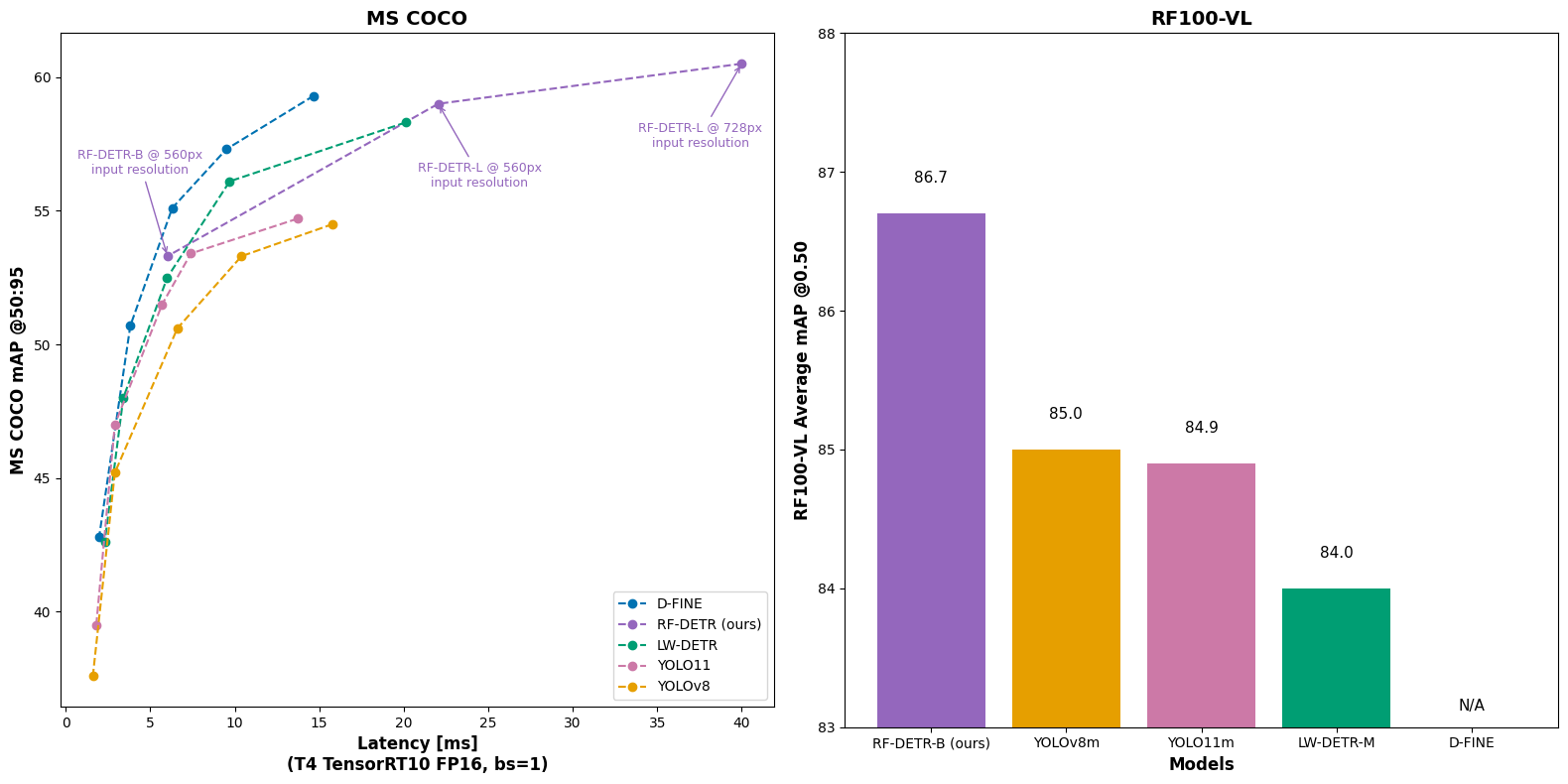
RF-DETR is the first real-time model to exceed 60 AP on the Microsoft COCO benchmark alongside competitive performance at base sizes. It also achieves state-of-the-art performance on RF100-VL, an object detection benchmark that measures model domain adaptability to real world problems. RF-DETR is comparable speed to current real-time objection models.
RF-DETR is small enough to run on the edge, making it an ideal model for deployments that need both strong accuracy and real-time performance.
We validated the performance of RF-DETR on both Microsoft COCO and the RF100-VL benchmarks.
| Model | mAPCOCO val @0.50:0.95 |
mAPRF100-VL Average @0.50 |
Total Latency T4 bs=1 (ms) |
|---|---|---|---|
| D-FINE-M | 55.1 | N/A | 6.3 |
| LW-DETR-M | 52.5 | 84.0 | 6.0 |
| YOLO11m | 51.5 | 84.9 | 5.7 |
| YOLOv8m | 50.6 | 85.0 | 6.3 |
| RF-DETR-B | 53.3 | 86.7 | 6.0 |
Benchmark notes
The "Total Latency" reported here is measured on a T4 GPU using TensorRT10 FP16 (ms/img) and was introduced by LW-DETR. Unlike transformer-based models, YOLO models perform Non-Maximum Suppression (NMS) after generating predictions to refine bounding box candidates. While NMS boosts accuracy, it also slightly reduces speed due to the additional computation required, which varies with the number of objects in an image. Notably, many YOLO benchmarks include NMS in accuracy measurements but exclude it from speed metrics. By contrast, our benchmarking—following LW-DETR’s approach—factors in NMS latency to provide a uniform measure of the total time needed to obtain a final result across all models on the same hardware.
D-FINE’s fine-tuning capability is currently unavailable, making its domain adaptability performance inaccessible. The authors caution that “if your categories are very simple, it might lead to overfitting and suboptimal performance.” Furthermore, several open issues (#108, #146, #169, #214) currently prevent successful fine-tuning. We have opened an additional issue in hopes of ultimately benchmarking D-FINE with RF100-VL.
2025/03/20: We release RF-DETR real-time object detection model. Code and checkpoint for RF-DETR-large and RF-DETR-base are available.
pip install rfdetrRF-DETR comes out of the box with a checkpoint trained from the Microsoft COCO dataset.
import io
import requests
import supervision as sv
from PIL import Image
from rfdetr import RFDETRBase
from rfdetr.util.coco_classes import COCO_CLASSES
model = RFDETRBase()
url = "https://media.roboflow.com/notebooks/examples/dog-2.jpeg"
image = Image.open(io.BytesIO(requests.get(url).content))
detections = model.predict(image, threshold=0.5)
labels = [
f"{COCO_CLASSES[class_id]} {confidence:.2f}"
for class_id, confidence
in zip(detections.class_id, detections.confidence)
]
annotated_image = image.copy()
annotated_image = sv.BoxAnnotator().annotate(annotated_image, detections)
annotated_image = sv.LabelAnnotator().annotate(annotated_image, detections, labels)
sv.plot_image(annotated_image)
RF-DETR expects the dataset to be in COCO format. Divide your dataset into three subdirectories: train, valid, and test. Each subdirectory should contain its own _annotations.coco.json file that holds the annotations for that particular split, along with the corresponding image files. Below is an example of the directory structure:
dataset/
├── train/
│ ├── _annotations.coco.json
│ ├── image1.jpg
│ ├── image2.jpg
│ └── ... (other image files)
├── valid/
│ ├── _annotations.coco.json
│ ├── image1.jpg
│ ├── image2.jpg
│ └── ... (other image files)
└── test/
├── _annotations.coco.json
├── image1.jpg
├── image2.jpg
└── ... (other image files)
Roboflow allows you to create object detection datasets from scratch or convert existing datasets from formats like YOLO, and then export them in COCO JSON format for training. You can also explore Roboflow Universe to find pre-labeled datasets for a range of use cases.
You can fine-tune RF-DETR from pre-trained COCO checkpoints. By default, the RF-DETR-B checkpoint will be used. To get started quickly, please refer to our fine-tuning Google Colab notebook.
from rfdetr import RFDETRBase
model = RFDETRBase()
model.train(dataset_dir=<DATASET_PATH>, epochs=10, batch_size=4, grad_accum_steps=4, lr=1e-4)During training, two model checkpoints (the regular weights and an EMA-based set of weights) will be saved in the specified output directory. The EMA (Exponential Moving Average) file is a smoothed version of the model’s weights over time, often yielding better stability and generalization.
from rfdetr import RFDETRBase
model = RFDETRBase(pretrain_weights=<CHECKPOINT_PATH>)
detections = model.predict(<IMAGE_PATH>)Both the code and the weights pretrained on the COCO dataset are released under the Apache 2.0 license.
Our work is built upon LW-DETR, DINOv2, and Deformable DETR. Thanks to their authors for their excellent work!
If you find our work helpful for your research, please consider citing the following BibTeX entry.
@software{rf-detr,
author = {Robinson, Isaac and Robicheaux, Peter and Popov, Matvei},
license = {Apache-2.0},
title = {RF-DETR},
howpublished = {\url{https://github.com/roboflow/rf-detr}},
year = {2025},
note = {SOTA Real-Time Object Detection Model}
}We welcome and appreciate all contributions! If you notice any issues or bugs, have questions, or would like to suggest new features, please open an issue or pull request. By sharing your ideas and improvements, you help make RF-DETR better for everyone.