- Updated from PyEphem to skyfield (same author, same purpose, complete rebuild)
- will add the ability to calculate the magnetic declination based on the location of the observer
- will add support for a compass (magnometer) to allow the pointer to not need to be aligned north.
- Updated for avalon framework 1.6.x.
- Added main controller
- Fixed motor controller
- Project Imported
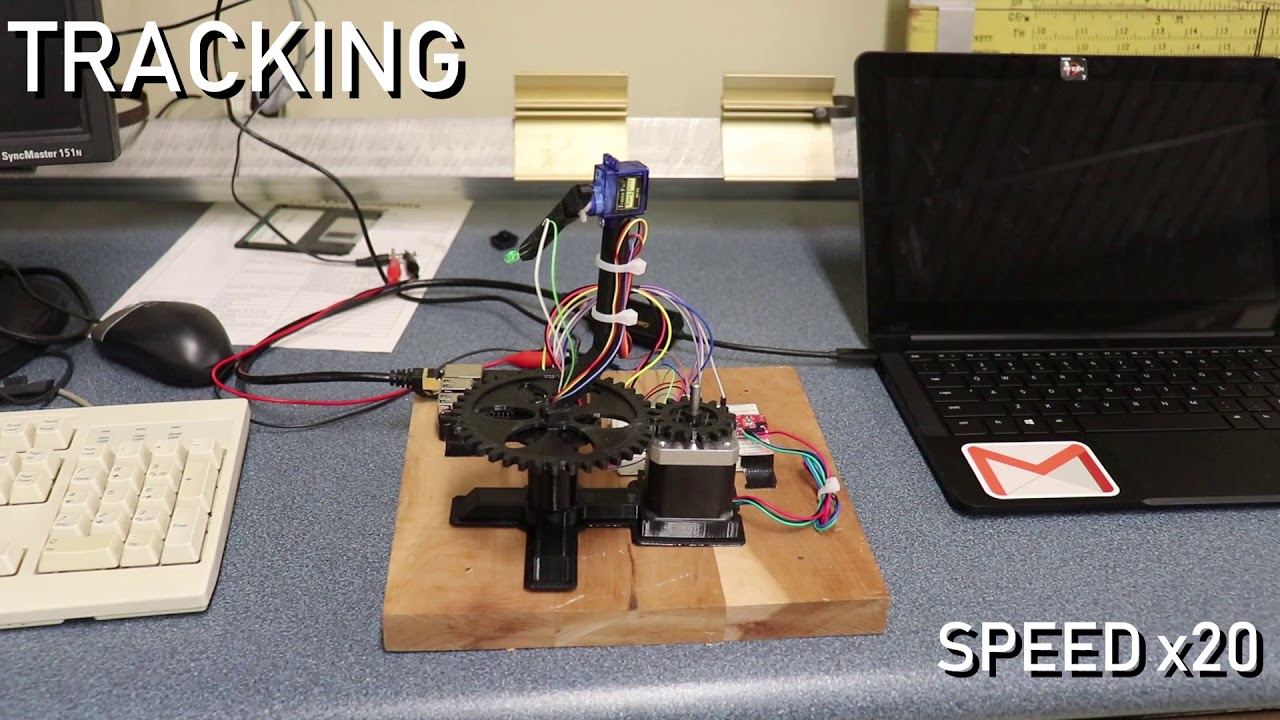
The raspberry pi ISS Pointer is a simple device that will always point to the current location of the International Space Station (ISS). This project is initialized as an ISU project.
{kind=link}
You can watch the demo video at HERE. If that link doesn't work, here's a manual one: https://www.youtube.com/watch?v=6hxp3M6DFm8
First, you'll have to have hardware as shown in the image above, and then you'll have to connect controllers to the RPi GPIO headers. Different hardware will require different setups. Our configuration is shown below in the GPIO Header section.
After setting up the hardware, you can just clone and run the python script.
$ git clone https://github.com/K4YT3X/iss-pointer.git
$ cd iss-pointer/bin
$ sudo python3 isspointer.py

It's important to note to always reset these pins back to the input mode to avoid frying them.