Python Decimation Filter with Aligning Frames #2356
Comments
|
Since 2.16 there is a simpler way to do this. The idea is to have single |
|
So I finally had a chance to try it on a realsense device after upgrading to 2.16. But currently this does not seem to work with python: AttributeError: 'pyrealsense2.composite_frame' object has no attribute 'apply_filter'. Is there any other way to apply the decimation filter before applying align? Or possibly another way to rebuild the frameset manually? |
|
[Realsense Customer Engineering Team Comment] If the decimation filter applied before align, that means the image size is reduce to 1/4. So far, it's not like the current implementation. |
|
Thanks for your reply @RealSense-Customer-Engineering . Here in this Issue, evp-mp #1207 (comment) explains in point 3 that he recommends applying filters before aligning.
That is why I wanted to do it that way. I also wanted to avoid having to rescale the aligned depth or color image myself to get it aligned again. |
|
[Realsense Customer Engineering Team Comment] Do you have more suggestions about the implementation in Python? |
|
@ev-mp #1207 (comment) explains in point 3 that he recommends applying filters before aligning. A python example code is required to have the correct the filters before align. |
Hi |
|
[Realsense Customer Engineering Team Comment] |
|
I would also like to see a working python example of alignment and post-processing together. This issue was closed without one being provided. The suggest |
|
This worked for me when i modified the align-dept2color.py example. both frames come out 640x480 decimate = rs.decimation_filter(8)
align_to = rs.stream.color
align = rs.align(align_to)
# Streaming loop
try:
while True:
# Get frameset of color and depth
frames = pipeline.wait_for_frames()
decimated = decimate.process(frames).as_frameset()
# Align the depth frame to color frame
aligned_frames = align.process(decimated) |
|
A reference python snippet was provided by @darrell-rg |
This script does work. So the size of frames doesn't change after the decimation filter, is that correct? How about " the Decimation Filter will reduce spatial resolution preserving z-accuracy and performing some rudamentary hole-filling." |
Is there any update on this aspect? I am trying to use the decimation filter specifically to reduce the resolution of the frame - and that seems like the most intuitive use of the filter. But, I am not getting a reduced frame size, I'm just getting the voxels in little grids of 3x3, 4x4, 5x5, etc. As per #10716 (comment), the last line of that opening post says that the frame size should be reduced if the decimation filter is applied AFTER alignment - but I can't get that to work on my system. I get errors a few lines later, in the open3d.geometry.RGBDImage.create_from_color_and_depth() function. |
|
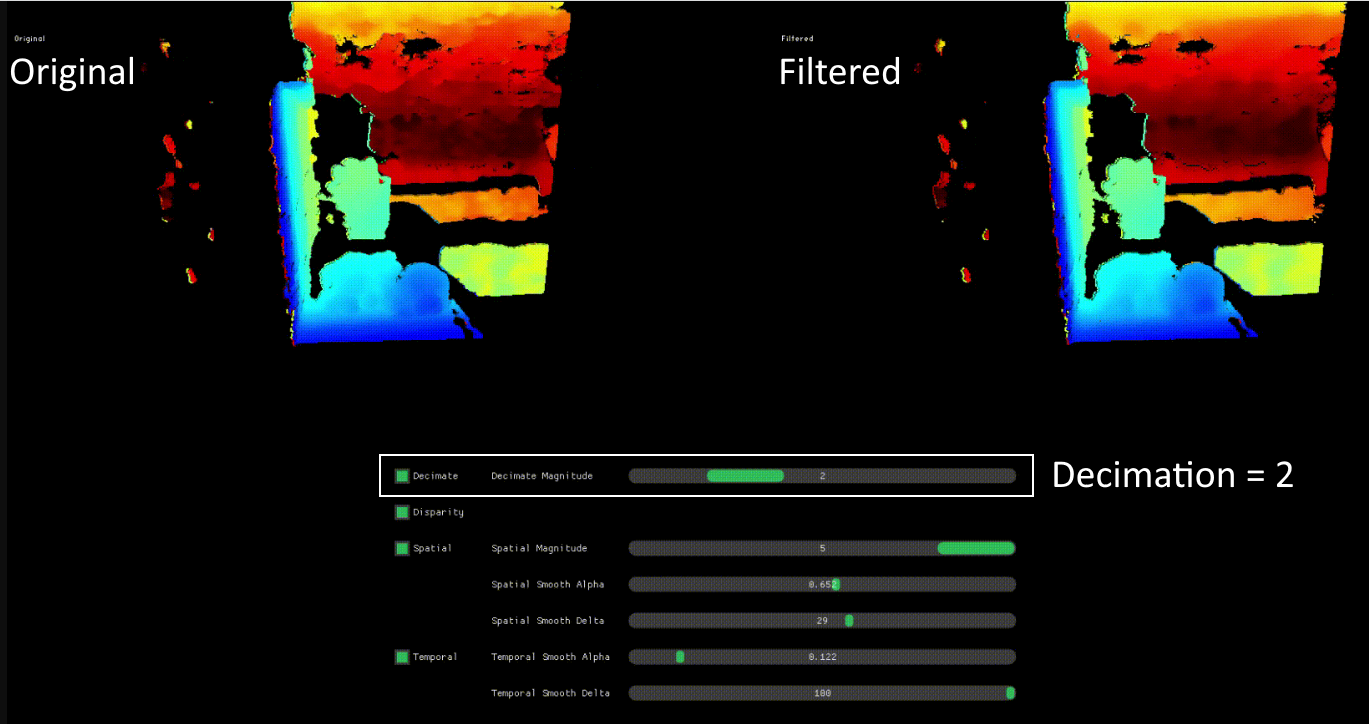
Can anyone please show me the result(image) after this(applying filter)? |
|
Hi @Bash226 An animated image in Intel's post-processing guide at the link below shows before (original) and after (post-processing) when applying filters such as Decimation. https://dev.intelrealsense.com/docs/rs-post-processing
|
Issue Description
I am trying to get the decimation filter combined with aligning frames to run, but could not make it work. I did not find any python documentation/issues/examples regarding this. As per this issue #1207 I wanted to first post-process before aligning.
Here is my current code. Everything works fine without using the filter.
I thought I figured out a way that could work, but currently the binding is bugged so I don't know if that would work:
Which gives me this:
TypeError: pyrealsense2.frame_source: No constructor defined!
So my question is: Am I on the right track? Or even better, Is there a way to do it without using allocate_composite_frame?
The text was updated successfully, but these errors were encountered: