About the stage1 training #20
Comments
|
Our query proposal network employs LMSCNet, which takes depth as input and produces 3D occupancy as output. The input depth is obtained from a readily available monocular or binocular depth model. Please refer to Section 3.4 for more details. |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
According to your paper:
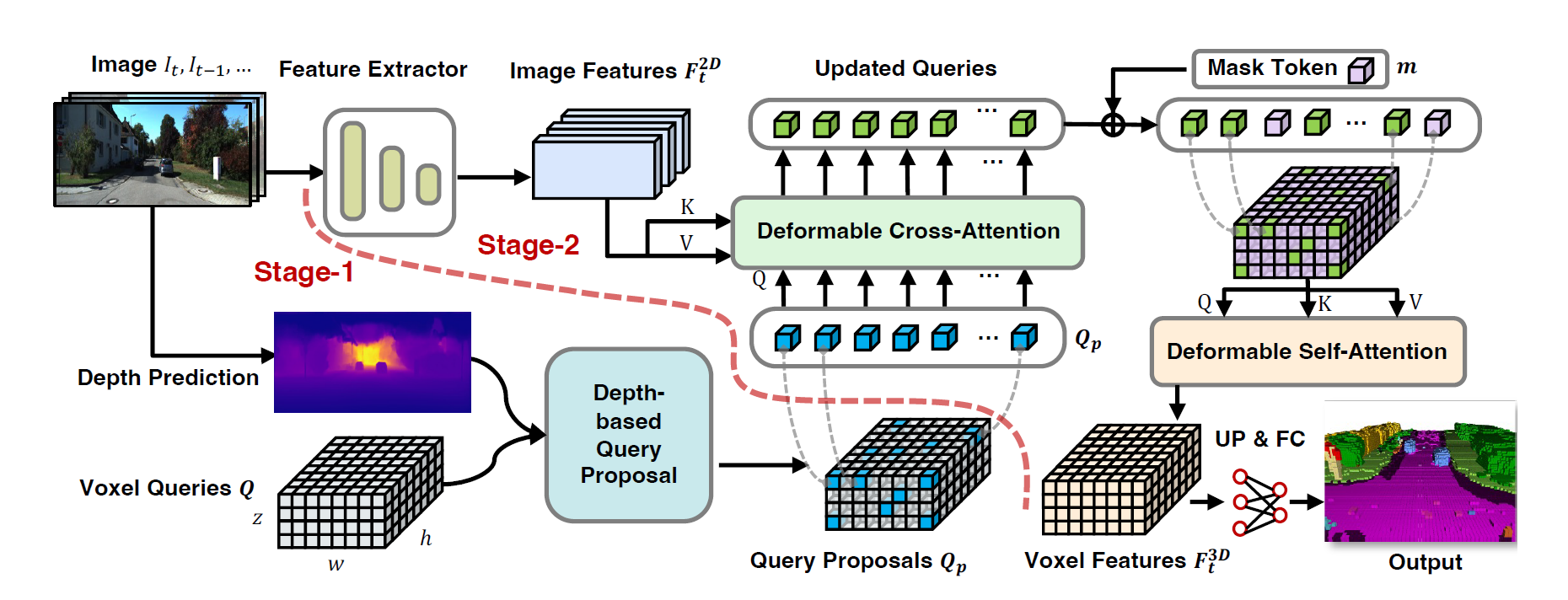
You output the query proposal based on the depth prediction, however I saw in your released code that you used
LMSCNetto generate the proposal, is it a misalignment? It seems thatLMSCNetdidn't generate a depth prediction, but got lidar input and output the class-specified results. Look forward to your reply!The text was updated successfully, but these errors were encountered: