近几年,随着自动驾驶、车路协同等概念的日益火热,地图厂商、传统汽车厂商以及有互联网背景的“造车新势力”纷纷加入了智能升级的探索之路。为了使智能驾驶更安全更可靠,实现高精度、实时感知周围环境的技术至关重要,该技术不仅可以精准快速地识别车道线、行驶区域、行人、车辆等,而且将车辆行驶路线“画”在地面,为驾驶人员提供车距监测、行人预警、车道偏离提醒和红绿灯提醒等一系列安全辅助功能,助力驾驶系统进行高效的决策。

但在真实产业中,要实现高精度的驾驶环境感知不是一件容易的事,在实际的路况中存在着各种各样的问题:
- 摄像头采集到的图像会受到树木、建筑遮挡以及车辆移动的影响;
- 天气多种多样,要适应白天、黑夜、雾天和雨天等;
- 车道线磨损程度不一,且不同区域的车道线新旧对识别也有很大的影响。
针对上述场景,本次飞桨产业实践范例库基于真实场景中的车载影像数据,推出了目标检测和车道线分割多任务处理的智能驾驶感知实践示例,提供从数据准备、技术方案、模型训练优化,到模型部署的全流程可复用方案,有效解决了不同光照、不同天气等室外复杂环境下的目标识别问题,适用于AR地图导航、机器人教育、厂区自动巡检、自动驾驶等多个产业应用。
方案难点:
- 多任务运算: 交通目标检测与车道线分割同时进行,相对于单一任务来说需要更多的算力和后处理方法;
- 精度与速度的均衡: 原有的解决方案在V100上进行处理,本项目要将方案部署到手机端,需要在尽可能少减低精度的同时保证实时性;
- 跨平台迁移: 将PaddleDetection和PaddleSeg中的模型转换到PaddleLite中,并部署到Android手机端,涉及到Python向C++与JAVA结合的工程落地;
- 端侧运行: 成果最终以app的形式在手机中进行展示,并能够调用手机摄像头进行检测与分割,是一个完整的应用软件。
环境要求
PaddlePaddle == 2.2.1
Python == 3.7
PaddleDetection == 2.1
PaddleSeg == 2.1
首先从gitee或者github上下载PaddleDetection和PaddleSeg
git clone https://gitee.com/PaddlePaddle/PaddleDetection.git -b release/2.1
git clone https://gitee.com/paddlepaddle/PaddleSeg.git -b release/2.1
安装相关依赖
pip install paddledet==2.1.0 -i https://mirror.baidu.com/pypi/simple
pip install paddleseg -i https://mirror.baidu.com/pypi/simple
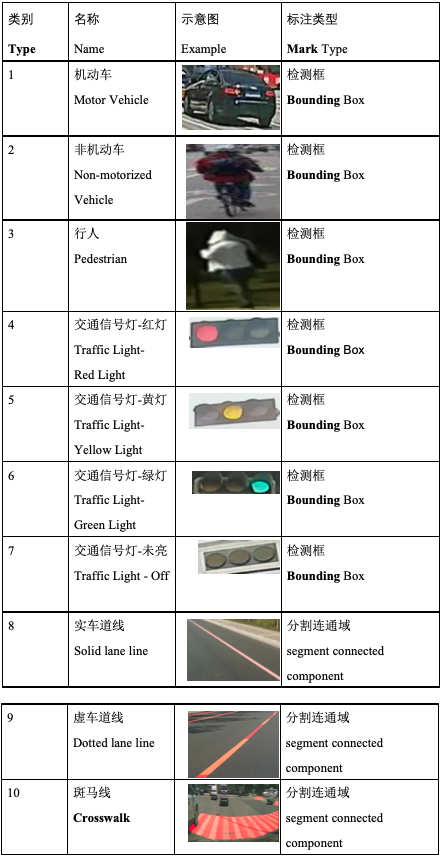
本范例使用数据集为2021大数据竞赛全部训练集,是百度地图提供的真实业务场景数据,共有16000张图片,使用json格式进行了标注:其中17类采用矩形检测框标注方法,810类采用分割连通域标注方法.
具体分类标准如下
数据存储说明
每个图像文件均对应一个同名的JSON文件,全部数据集格式为:
train,全部数据文件夹
- image,存放全部图片
00001.jpg 00002.jpg ...... 16000.jpg - label,存放全部JSON文件
00001.json 00002.json ...... 16000.json
JSON文件格式说明
JSON文件以字典的形式保存每个检测目标或分割区域的信息,示例如下:
[
{
"type": 1, 类别
"x": 766, bbox左上角点x
"y": 384, bbox左上角点y
"width": 53, bbox宽度
"height": 45, bbox高度
"segmentation": [] 多边形点信息,检测目标为空
},
{
"type": 8,
"x": -1,
"y": -1,
"width": -1,
"height": -1,
"segmentation": [ 多边形点信息,每两个数字组成一个点的位置,顺序为x,y
[
380.311,
623.614,
358.423,
638.089,
390.173,
634.197,
389.122,
633.179
]
]
}
]
本项目不仅仅是提供一个完整的开发过程,也将对模型选择、优化思路进行说明。
模型上选择的几个思考点
-
场景真:本项目中数据为真实交通场景,所以模型特征提取能力和泛化能力要强
-
任务多:同时解决检测和分割两个任务,选模型和优化时要权衡精度与速度两方面。
-
效率高:模型要尽量小、训练与预测速度要尽量快、且能够在平台上稳定运行
检测模型的选择
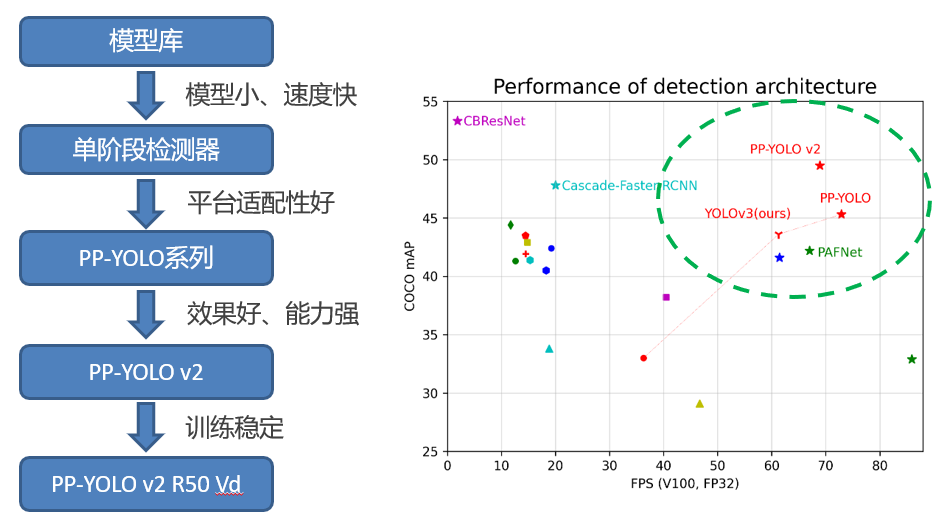
如上图所示,第一阶段先选择PPYOLOV2-R50vd来作为检测基准模型。
分割模型的选择
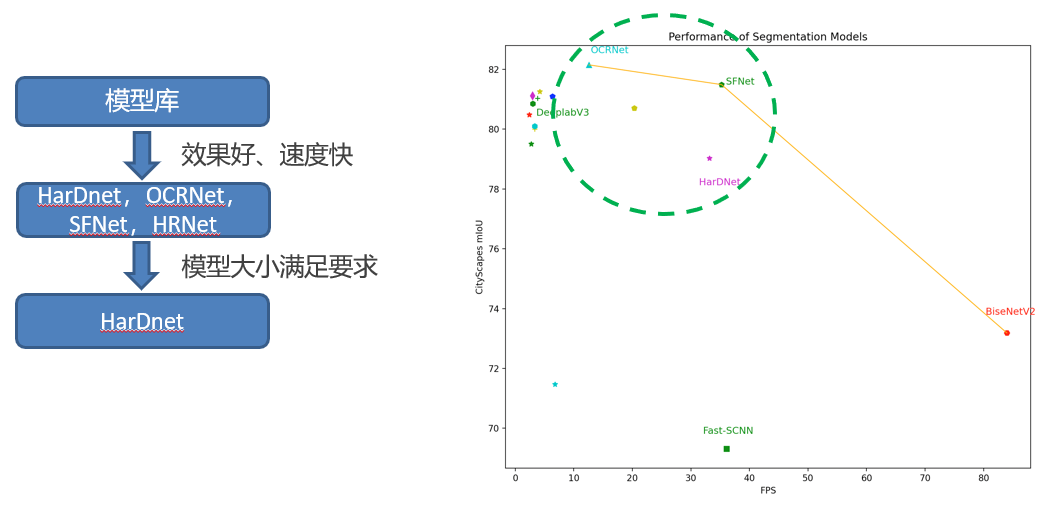
如上图所示,第一阶段先选择HarDNet来作为检测基准模型。
608 (w) * 608(h) -> 480(w) * 480(h),训练采用多尺度
8卡V100 32GB BS12 Lr0.01 -> 1卡V100 32GB BS 6 Lr0.002
COCO 80类,训练365轮 -> BIGDATA 7类,先验性强,训练40轮
RandomDistort – hue、saturation、contrast、brightness范围缩小到[0.8, 1.2]
RandomExpand – ratio从4.0降到1.5
RandomCrop – aspect_ratio调整到[0.8, 1.3],scaling[0.7, 1.0]
RandomResize – [384, 384] 到 [544, 544],随机缩放算法
Mixup – 训练第36轮后取消Mixup用于提高检出结果的可靠性
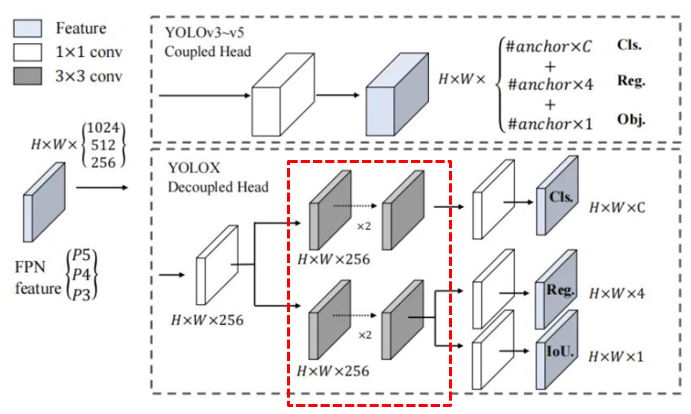
Note: 在复现过程中,考虑到性能问题,删除了图中红色框部分的卷积层,可以将模型有效的缩小
| 模型及方法 | MAP @0.5 | 服务器预测帧率 FPS | 模型占用空间大小 |
|---|---|---|---|
| PPYOLOV2-R50 | 0.81 | 52 | 240MB |
| + 分辨率480 * 480 | 0.72 (-0.09) | 78 | 239MB |
| + 先验性数据增强 | 0.73 (+0.01) | 78 | 239MB |
| + DCN位置调整 | 0.75 (+0.02) | 75 | 242MB |
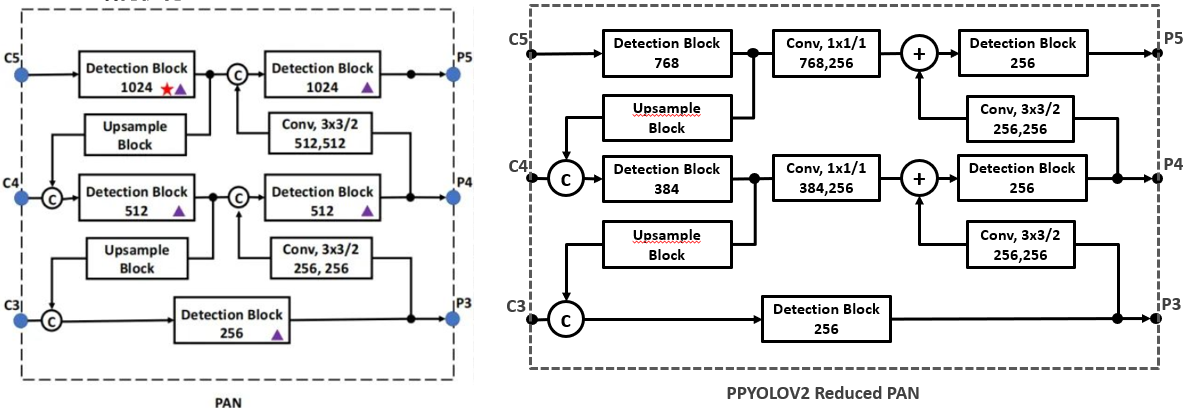
| + Reduced PAN | 0.75 (+0.00) | 86 | 188MB |
| + Decoupled Head | 0.77 (+0.02) | 83 | 195MB |
- 调整模型分辨率:
1024 (w) * 1024(h) -> 480(w) * 480(h),训练采用多尺度(保持跟检测模型一样的分辨率) - 调整训练超参数:
1卡V100 32GB BS 4 Lr0.002 BIGDATA 3类,先验性强,训练10轮 - 数据增强调整:
RandomBlur – prob 0.4 RandomHrizontalFlip – prob 0.5 RandomCrop – aspect_ratio调整到[0.8, 1.3],scaling[0.7, 1.0] RandomDistort – hue、saturation、contrast、brightness范围缩小到[0.8, 1.2]
【基础版】Pipeline部署推理
为了尽可能简单实现全流程,首先使用串行的流程进行处理:

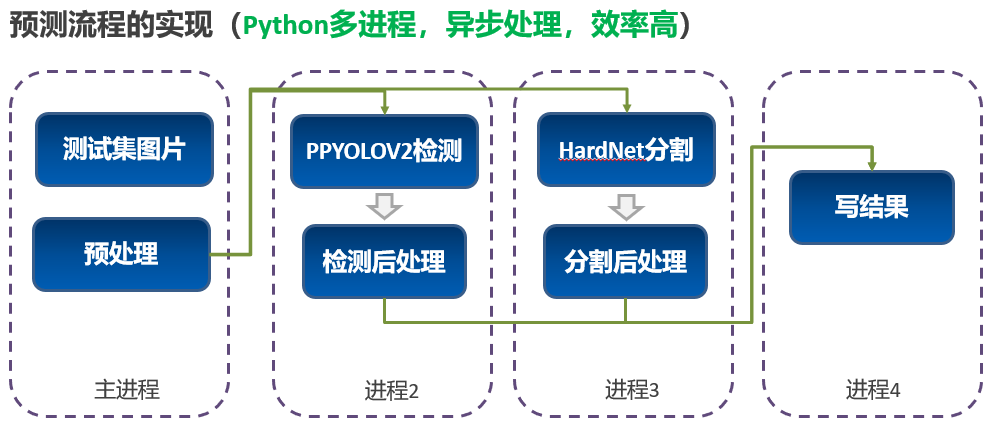
【优化版】Pipeline部署推理
为了让两个任务能够尽可能达到最好的效率,做了如下多进程异步的设计:
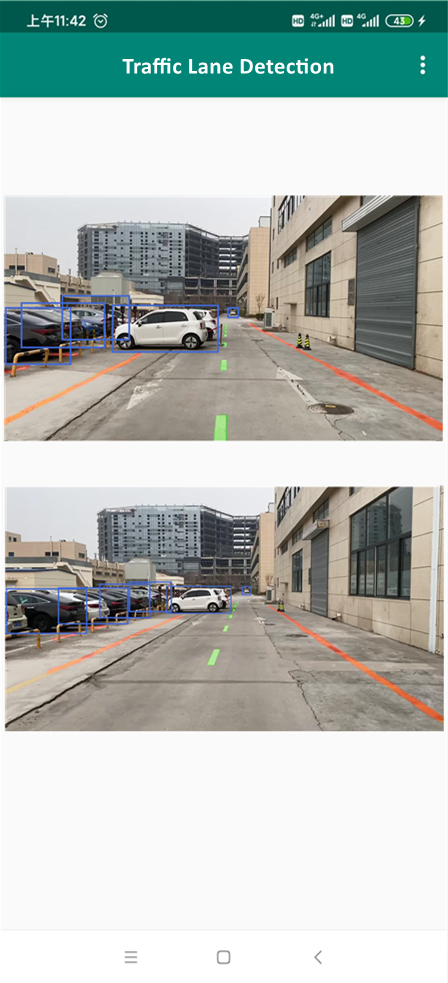
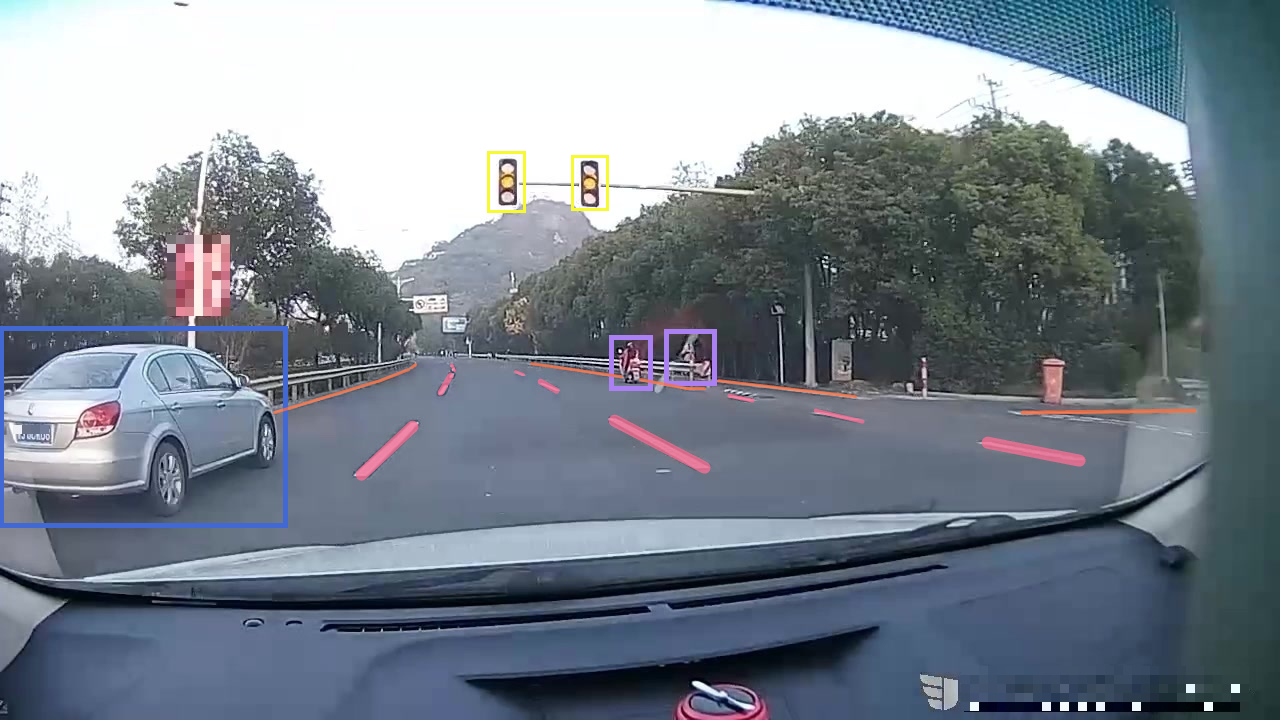
【推理结果】结果示例
示例1:

示例2:
# 安装paddle_lite_opt工具
!pip install paddlelite
# 基于前面export model的步骤,对模型再一次进行PaddleLite格式的转化
!cd /home/aistudio/work/model/
# 首先转换检测模型
!paddle_lite_opt --model_file=ppyolov2_r50vd_dcn_optimize/model.pdmodel --param_file=ppyolov2_r50vd_dcn_optimize/model.pdiparams --optimize_out=ppyolov2_r50vd_dcn_optimize
# 然后转换语义分割模型
!paddle_lite_opt --model_file=hardnet/model.pdmodel --param_file=hardnet/model.pdiparams --optimize_out=hardnet【1】准备一台arm8的安卓手机,这里我使用了一台性能中上等的国产安卓手机
【2】电脑上安装ADB工具,用于调试。 ADB安装方式如下:
2.1. MAC电脑安装ADB:
```shell
brew cask install android-platform-tools
```
2.2. Linux安装ADB
```shell
sudo apt update
sudo apt install -y wget adb
```
2.3. Window安装ADB
win上安装需要去谷歌的安卓平台下载ADB软件包进行安装:[链接](https://developer.android.com/studio)
【3】手机连接电脑后,开启手机USB调试选项,选择文件传输模式,在电脑终端中输入:
adb devices如果有device输出,则表示安装成功,如下所示:
List of devices attached
744be294 device
- 准备优化后的模型、预测库文件、测试图像和类别映射文件。
cd /home/aistudio/work/PaddleDetection/
cd deploy/lite/
# 将预测库文件、测试图像和使用的类别字典文件放置在预测库中的demo/cxx/detection文件夹下
inference_lite_path=/home/aistudio/work/PaddleDetection/deploy/lite/inference_lite_lib.android.armv8.clang.c++_static.with_extra/
mkdir -p $inference_lite_path/demo/cxx/detection/debug/
cp /home/aistudio/work/model/ppyolov2_r50vd_dcn_optimize.nb $inference_lite_path/demo/cxx/detection/debug/
cp ./yidaiyilu_label_list.txt $inference_lite_path/demo/cxx/detection/debug/
cp Makefile run_detection.cc $inference_lite_path/demo/cxx/detection/
cp ./config_ppyolov2_optimize.txt $inference_lite_path/demo/cxx/detection/debug/
cp ../../demo/000000014439.jpg $inference_lite_path/demo/cxx/detection/debug/
cp $inference_lite_path/cxx/lib/libpaddle_light_api_shared.so $inference_lite_path/demo/cxx/detection/debug/
执行完成后,detection文件夹下将有如下文件格式:
demo/cxx/detection/
|-- debug/
| |--ppyolov2_r50vd_dcn_optimize.nb 优化后的检测器模型文件
| |--000000014439.jpg 待测试图像
| |--yidaiyilu_label_list.txt 类别映射文件
| |--libpaddle_light_api_shared.so C++预测库文件
| |--config_ppyolov2_optimize.txt 检测模型预测超参数配置
|-- run_detection.cc 目标检测代码文件
|-- Makefile 编译文件
- 启动调试,上述步骤完成后就可以使用ADB将文件夹
debug/push到手机上运行,步骤如下:
# 执行编译,得到可执行文件detect_system
# 如果是编译armv7的执行程序,需要使用 Makefile_armv7 替换 Makefile 文件
make
# 将编译得到的可执行文件移动到debug文件夹中
mv detect_system ./debug/
# 将上述debug文件夹push到手机上
adb push debug /data/local/tmp/
adb shell
cd /data/local/tmp/debug
export LD_LIBRARY_PATH=/data/local/tmp/debug:$LD_LIBRARY_PATH
# detect_system可执行文件的使用方式为:
# ./detect_system 配置文件路径 测试图像路径
./detect_system ./config_ppyolov2_optimize.txt ./000000014439.jpg【目的】:
将基于 Paddle Lite 预测库的 Android APP 部署到手机,实现物体检测
【需要的环境】:
Android Studio、Android 手机(开启 USB 调试模式)、下载到本地的 Paddle Lite Demo 工程
【预先要求】:
如果您的 Android Studio 尚未配置 NDK ,请根据 Android Studio 用户指南中的安装及配置 NDK 和 CMake 内容,预先配置好 NDK 。您可以选择最新的 NDK 版本,或者与 Linux x86 环境下编译适用于 Android 的库、macOS 环境下编译适用于 Android 的库 两个章节中的 NDK 版本保持一致。
【部署代码结构介绍】:
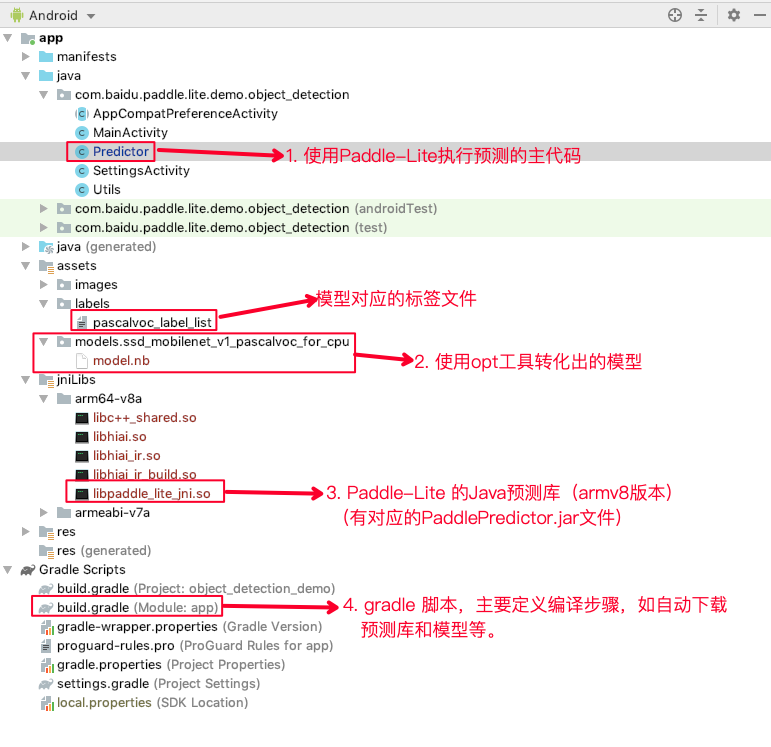
【Android Studio使用说明及编译方法】
Android Studio使用说明及编译方法参见官方提供的样例
【APK安装】
APK已经编译完成,可以下载工程中的lanedetection.apk进行安装。安装方法有:
1. 使用Android Studio安装
2. 使用adb install安装
【运行效果】