How to implement a multiobjective TSP? #142
Comments
|
|
Hi David, thank for responding so quickly on my three questions! About Q1: How can I minimise the carbon objective by referring to the matrix given above?I still have trouble obtaining a result. Here is my code: And I get this error message: About Q3: How would you propose to implement a multiobjective TSP in Platypus?Thanks for the recommendation on the 2-opt operator, will try it out definitely. But I was more asking on how write the multiobjective TSP in Platypus. I am not a very experienced programmer as you can probably tell. Therefore, I would be very thankful if you could give me some inspiration by providing a rough outline on how to setup the code for a multiobjective TSP in Platypus. I have another matrix with the traveling times between the 6 exemplary cities. I suppose I need to write another function which calculates the total traveling time for a given tour. The Am I thinking in the right direction here? In the documentation I didn't find much about implementing multiple objective functions unfortunately. |
and just set |
|
Hi David, thanks for all the help so far! I managed to implement the multiobjective function. Now, I am trying to use local search operators like two_opt which you recommended. I guess having to rely only on random permutatations is not quite efficient. I have implemented the two_opt function in the normal TSP first. It works for me but it's taking quite some time to complete the function evaluations. Could you please take a look and tell me what could be improved? Also, I was wondering: Did you ever achieve to get the optimal route for PR76 with Platypus? Thanks again |
|
This is the version of 2-opt that I wrote in Java - https://github.com/MOEAFramework/MOEAFramework/blob/master/examples/org/moeaframework/examples/ga/tsplib/TSP2OptHeuristic.java. It's been a few years since I wrote that so I forget the details, but one difference I see is that you don't need to compute the full route each time, you can just compute the distance between the four cities (i, i+1, j, j+1). I don't think I've ever seen the optimal result for PR76 without 2-opt, but that's not surprising. There are 76! = 1.88 x 10^111 different permutations. Without some local search, it's really, really hard to find the optimum. With 2-opt, you can find the optimum in 10-20 iterations. The MOEAFramework, the Java library I wrote that Platypus is based on, has all this implemented. |
|
Adding to ☝️ , it also can plot the search, showing the best route found so far (red), and the current population (gray lines) - http://moeaframework.org/images/screenshot-5.png |
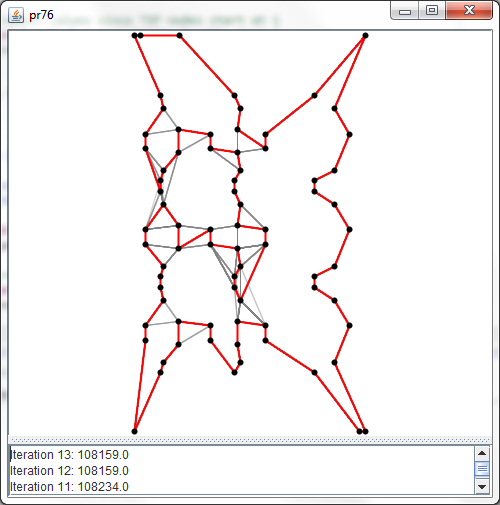{kind=link}
|
Hi David, I implemented your version of two_opt which really seems to work better. Now, I have some problem with the distance matrix which is needed for the two_opt operator. The Error: The code runs fine when I feed the function a predefined route tough. Where is this error coming from? Thanks again for the help! |
|
Have it return |
|
It works, thanks! The two_opt is quite fast and is getting me good results. But the I get a result like this: When I plug this route into the |
|
This issue is stale and will be closed soon. If you feel this issue is still relevant, please comment to keep it active. Please also consider working on a fix and submitting a PR. |
Hi everyone,
This question is a rather long one. It is referring to this example code: https://github.com/Project-Platypus/Platypus/blob/master/examples/tsp.py
I am working on a multiobjective TSP model where the salesman can choose between bus or flight to go from city i to j. The two conflicting objectives are to minimise travelling time and carbon emissions. This would be applicable to a tourist doing a citytrip, the tourist has the choice whether to go by plane (fast but carbon intensive) or by bus (slow but green).
I created my own "distance matrices" for carbon emissions and traveling time for 6 cities. This dataset I would like to feed the NSGA-II algorithm to find out the non-dominated solutions. Below is just the carbon emission matrix:
I tried writing my emissions function based on the tsp()-function from the example code (https://github.com/Project-Platypus/Platypus/blob/master/examples/tsp.py):
I tried to feed this function into the solver but failed to get a reasonable solution:
Questions:
tour=x[0]which I have taken from the tsp()-function. Is this referring to the decision variable x_ij?Thanks in advance
Kevin
For more information on my model you can refer to my question in OR-Stackexchange: https://or.stackexchange.com/q/3933/3385
The text was updated successfully, but these errors were encountered: