Distributed Delay Equation conversion to ODEs #45
Comments
|
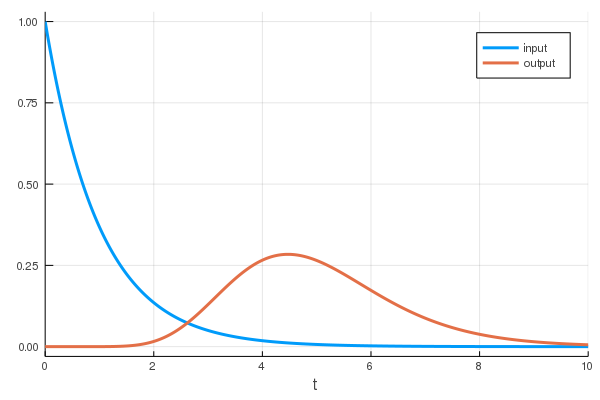
I have been thinking about this in the context of DiffEqBiological.jl but I quickly put that on the shelf since it seemed impractical. How should this be implemented here? A naive way of achieving this result would be something like: using ModelingToolkit
using DifferentialEquations
using Plots
function distributed_delay!(eqs, input, output, n, r)
internals = [Variable(:internal, i)(t) for i in 1:n-1]
vars = vcat(input, internals)
append!(eqs, [D(vars[i]) ~ r * (vars[i-1] - vars[i]) for i in 2:n])
push!(eqs, D(output) ~ r * ( vars[end] - output))
return internals
end
@parameters t r
n = 12
@derivatives D'~t
@variables x(t) z(t)
eqs = [D(x) ~ - x]
internals = distributed_delay!(eqs, x, z, n, r)
de = ODESystem(eqs)
f = ODEFunction(de, vcat(x, internals, z), [r])
tspan = (0., 10.)
p = [3]
u0 = fill(0., length(de.dvs))
u0[1] = 1
prob = ODEProblem(f, u0, tspan, p)
### Hide all the internal variables that we used
mask = @. !occursin("internal", String(Symbol(de.dvs)))
sol = solve(prob; save_idxs = mask)
plot(sol; label = ["input", "output"])
This may be better that nothing, but it still has a problem in that the I consider this implementation to have four issues which should be addressed:
Thoughts? Edit: |
|
I was thinking of it completely differently. Instead, a distributed delay is like D(x(t)) ~ x(t-Gamma(lambda))so the delay time is a random variable, and we need to interpret that and transform it to the set of ODEs. |
|
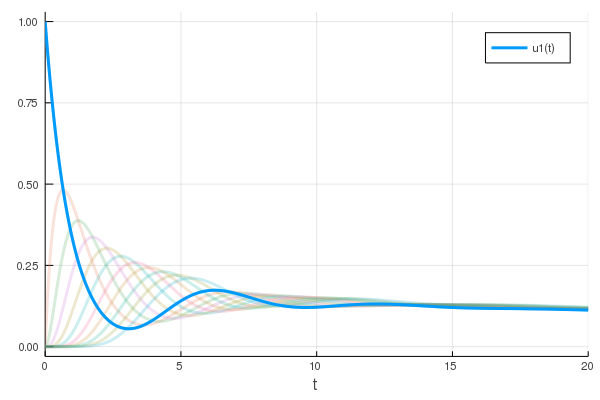
I recently wrote a paper on how gamma-distributed delays are often good for simplifying arbitrary linear signalling pathways and I now find myself craving an easy way to use them in more complicated models. I'm thus returning to this issue, initially to gauge how much work the implementation would take and whether it is wise to implement this during the little time I have left of my PhD. I just spent some time familiarizing myself with ModelingToolkit but I can't claim to grok it yet. I like the proposed notation except that the gamma distribution takes two parameters D(x(t)) ~ x(t - Gamma(α, β))At first glance, I don't think that it looks too hard to accommodate this API, what I'm more worried about are the next steps. I would much prefer the parameter For an ODE, I would like D(x(t)) ~ x(t - Gamma(α, β)) - d_x * x(t)to generate a function: (du, u, p, t)->begin
## Sort out the parameters first since they are used in the next step
let (α, β, d_x) = (Int(p[1]), p[2], p[3])
## Make nice handles for derivatives and variables
let (dx, dx_internals, x, x_internals) = (@view(du[1]), @view(du[2:1+α]), u[1], @view(u[2:1+α]))
## The gamma distrubuted delay (with some bounds checks lest we error for low α values)
if length(dx_internals) >= 1
dx_internals[1] = β * (x - x_internals[1])
if length(dx_internals) >= 2
@. dx_internals[2:end] = β * (x_internals[1:end-1] - x_internals[2:end])
end
else
x_internals = [x]
end
## The "normal" mathematics
dx[1] = x_internals[end] - d_x * x
end
end
endSimulating this (after assigning the function to the variable using DifferentialEquations
using Plots
p = [10, 2, 1.1]
tspan = (0., 20.)
u0 = vcat(1., fill(0., Int(p[1])))
prob = ODEProblem(model, u0, tspan, p)
sol = solve(prob)
plot(sol, alpha=0.2, label="")
plot!(sol, vars=[1], color=1)
The interface could be tidied up a bit by allowing automatic expansion of the However, I currently don't see how to nicely implement this since I don't see a simple way of making this work with the calculation of the Jacobian, etc. A simpler, but less appealing alternativeA less appealing alternative would be to not allow eqs = [D(x(t)) ~ x(t - Gamma(3, β)) - d_x * x(t)]and created some internal variables and then spat out eqs = [
D(x(t)) ~ x_internal[3] - d_x * x(t),
D(x_internal[1]) ~ β * (x(t) - x_internal[1]),
D(x_internal[2]) ~ β * (x_internal[1] - x_internal[2]),
D(x_internal[3]) ~ β * (x_internal[2] - x_internal[3]),
]Here, all the downstream calculations would be given for free, but one would have to create a whole new object every time one wished to change the Does anyone have a better idea of how to implement this? And if not, which of the two would be preferred? |
|
I kind of like the second, since then it would work in general and all acceleration would work. But I understand the issue there. Maybe there can be DistributedDelaySystem for defining these equations, and the transformation function can then take in the parameters required to convert to an ODESystem, or if you compile it directly you get your first version? |
|
A distributed delay approach would be really handy right now - is there any progress on this? |
|
Not on my end. But I like what @korsbo created here, so I would be happy to get it added to the library. |
|
Are 'standard' fixed delays (x(t-\tau)) implemented (or on the timeline)? For distributed delays, I'll see what I can do with @korsbo's suggestion. Have you seen this discrete time implementation that does bookkeeping of time spent in a certain state? |
|
Not quite yet: we need to make a DDESystem that lowers properly. It's planned to be done, but not finished yet. There's a few tricks that need to be worked out in the function generation. That said, everything on the DifferentialEquations.jl side is already ready of course: it's just an MTK thing. |
|
Hi, just following up - not on the distributed delay, which I understand needs more work on the symbolic side, but on the fixed delay side (x(t-\tau)). Feel free to assign me something if I can help - I just need a pointer. Here's a simple example DDE model: https://github.com/epirecipes/sir-julia/blob/master/markdown/dde/dde.md |
|
DDEs are fairly difficult. To illustrate this, I wrote down exactly what needs to be done: If you want to take a crack at it, see if you can get a good automatic detector for delay terms in the RHS, along with an |
https://link.springer.com/article/10.1007/s10928-018-9570-4
The text was updated successfully, but these errors were encountered: