Calibration.flip()函数的原理 #23
Comments
|
|
我使用了一个更简单的函数实现了这一功能(直接对内参进行操作,1.翻转后,0号相机与2号相机的相对位置刚好掉转,因此偏移量乘以-1;2.翻转时成像面也翻转了,因此相机的cu相对于图像中轴线也镜像翻转): def flip_simple(self, img_size):
img_w = img_size[0]
_cu = img_w - self.cu
self.cu = _cu
self.P2[0, 2] = _cu
self.tx *= -1
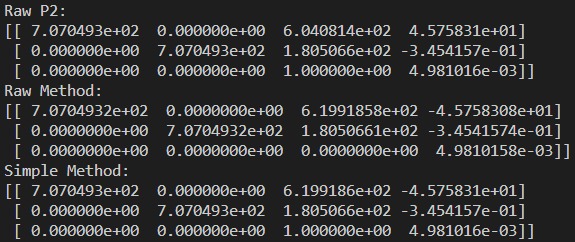
self.P2[0, 3] *= -1最终算出来的结果与您的原函数有很小的误差,我感觉应该也是对的?: calib_1 = Calibration('./kitti/training/calib/000000.txt')
calib_2 = Calibration('./kitti/training/calib/000000.txt')
print("Raw P2:")
print(calib_1.P2)
calib_1.flip([1224, 370])
calib_2.flip_simple([1224, 370])
print("Raw Method:")
print(calib_1.P2)
print("Simple Method:")
print(calib_2.P2)结果: |
|
正确的 |
|
你是对的,mmdet里也有类似的实现,这就是我说的更容易的那种实现,完全正确。
… 在 2022年7月2日,00:08,kwong292521 ***@***.***> 写道:
我使用了一个更简单的函数实现了这一功能(直接对内参进行操作,1.翻转后,0号相机与2号相机的相对位置刚好掉转,因此偏移量乘以-1;2.翻转时成像面也翻转了,因此相机的cu相对于图像中轴线也镜像翻转):
def flip_simple(self, img_size):
img_w = img_size[0]
_cu = img_w - self.cu
self.cu = _cu
self.P2[0, 2] = _cu
self.tx *= -1
self.P2[0, 3] *= -1
最终算出来的结果与您的原函数有很小的误差,我感觉应该也是对的?:
calib_1 = Calibration('./kitti/training/calib/000000.txt')
calib_2 = Calibration('./kitti/training/calib/000000.txt')
print("Raw P2:")
print(calib_1.P2)
calib_1.flip([1224, 370])
calib_2.flip_simple([1224, 370])
print("Raw Method:")
print(calib_1.P2)
print("Simple Method:")
print(calib_2.P2)
结果:
—
Reply to this email directly, view it on GitHub, or unsubscribe.
You are receiving this because you commented.
|
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
作者你好,在数据增强的水平翻转操作中,若图像进行了翻转,那么相机的相关标定信息会发生变化。在您的代码中体现在kitti.py中的calib.flip(img_size)这一操作,但是我不是很理解函数中为什么要构造cos_matrix这个矩阵以及用奇异值分解来求解相关系数,因此想向您请教一下该函数的相关数学原理出处,期待回复,非常感谢!!!
The text was updated successfully, but these errors were encountered: