Create 8_Puzzle_Problem.py #1183
Labels
invalid
This doesn't seem right
Comments
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
mport copy
from prettytable import PrettyTable
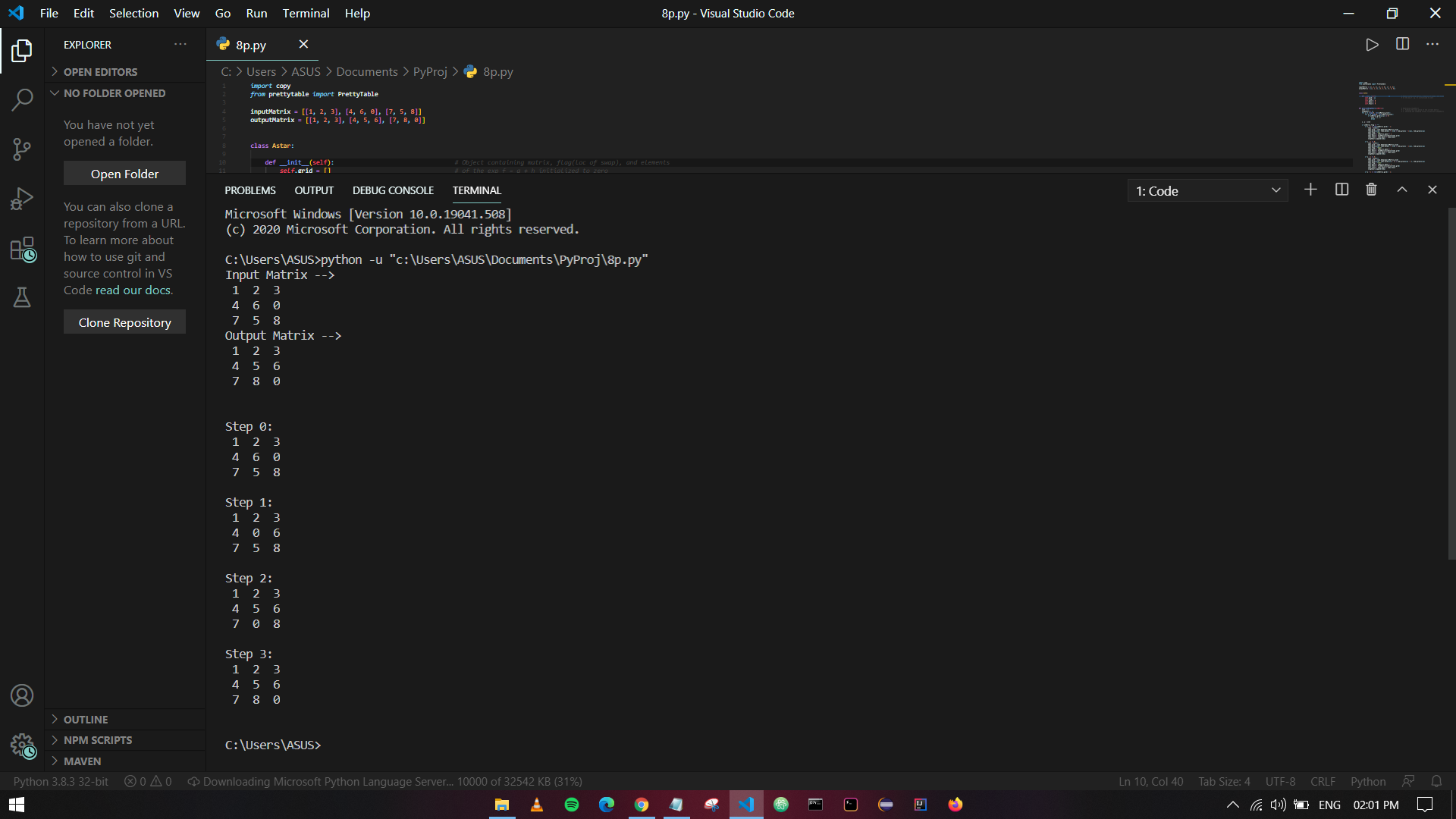
inputMatrix = [[1, 2, 3], [4, 6, 0], [7, 5, 8]]
outputMatrix = [[1, 2, 3], [4, 5, 6], [7, 8, 0]]
class Astar:
def init(self): # Object containing matrix, flag(loc of swap), and elements
self.grid = [] # of the exp f = g + h initialized to zero
self.flag = ""
self.gCost = 0
self.hCost = 0
self.fCost = 0
def generateNeighbours(inMatrix): # Generating neighbours
slot = () # 1. Finding the void place of the current matrix
neighbours = [] # 2. Checking and swapping values to generate neighbours
for i in range(0, len(inMatrix.grid)):
for j in range(0, len(inMatrix.grid)):
if inMatrix.grid[i][j] == 0:
slot = (i, j)
break
x, y = slot
if inMatrix.flag == "":
if x + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x + 1][y] = tobj.grid[x + 1][y], tobj.grid[x][y]
tobj.flag = "up"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if inMatrix.flag == "up":
if x + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x + 1][y] = tobj.grid[x + 1][y], tobj.grid[x][y]
tobj.flag = "up"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if inMatrix.flag == "down":
if x - 1 >= 0:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x - 1][y] = tobj.grid[x - 1][y], tobj.grid[x][y]
tobj.flag = "down"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if inMatrix.flag == "left":
if x + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x + 1][y] = tobj.grid[x + 1][y], tobj.grid[x][y]
tobj.flag = "up"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if inMatrix.flag == "right":
if x + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x + 1][y] = tobj.grid[x + 1][y], tobj.grid[x][y]
tobj.flag = "up"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
return neighbours
def findHeuristicValue(inMatrix): # Comparing position of values of current matrix to the ones of desired matrix
h = 0
for i in range(0, len(inMatrix)):
for j in range(0, len(inMatrix)):
if inMatrix[i][j] != outputMatrix[i][j]:
h += 1
return h
def findBestMatrix(openList): # Select best matrix from open list and return it
bestmatrix = Astar()
mincost = float("inf")
for matrix in openList:
if matrix.fCost <= mincost:
mincost = matrix.fCost
bestmatrix = matrix
return bestmatrix
def printMatrix(matrix): # Formatting matrices
p = PrettyTable()
for row in matrix:
p.add_row(row)
return p.get_string(header=False, border=False)
def pathFinder():
openList = []
closedList = []
current = Astar()
current.grid = inputMatrix
openList.append(current)
steps = 0
print("Input Matrix -->") # Printing Input Matrix
print(printMatrix(current.grid))
print("Output Matrix -->") # Printing Output Matrix
print(printMatrix(outputMatrix))
print()
print()
while True:
current = findBestMatrix(openList)
openList.remove(current)
closedList.append(current)
pathFinder()
The text was updated successfully, but these errors were encountered: