Automatic detection of tsunami inundation lines from videos and bore speed computation
##Project: NEES tsunami project in Oregon State University in 2013 and 2014.
The image processing codes are developed using MATLAB by Yongqian Yang as part of Ph.D. research in Coastal Engineering. The codes analyze the videos of experimental tsunami inundation frame by frame, and automatically detact the inundation boundaries (i.e., bore fronts) in each instantaneous frame. The codes also compute the speed of tsunami inundation from the videos.
"Bore_track_YY_2014_debug" is the main algorithm for bore-front detection and tsunami speed computation, while the other files are functions called in the main algorithm.
##The main steps are: 1. Synchronize all videos frames to the same start 2. Substract background from each instantaneous frame, then detect the bore fronts in the difference frame 3. Smooth bore fronts to elimiate spikes 4. Calculate speed from orthogonal distances between each two bore fronts. Each pixel along a bore front can obtain a bore speed from computation, resulting in high-resolution field of velocity
This animation briefly shows how the image processing algorithm works. From left
to right are raw difference frame, after noise elimination and projection to
video.

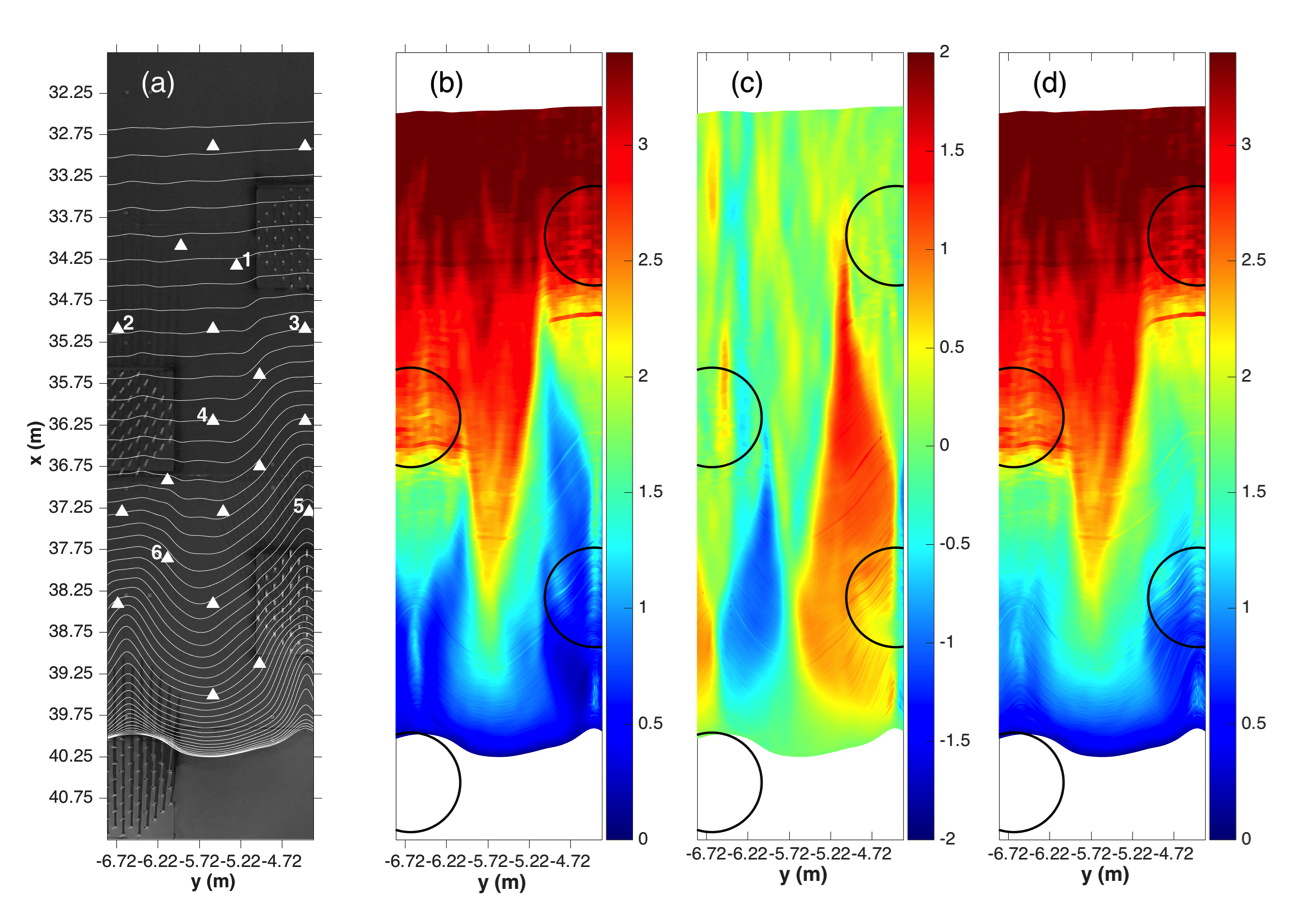
This figure below shows the detected bore fronts (a), cross-shore velocity (b), alongshore velocity (c) and velocity speed fields, generated by the image processing algorithm.