Python library for reading data from UNI-T UT61E DMM.
If you have raw data from your UT61E using Arduino or some other µP, check ut61e_parser_example.py file in src folder to see how it works.
This library was written as a weekend project. Its main goal was to learn the UNI-T UT61E data protocol.
The project uses the IR RS-232 adapter which is supplied with the DMM and Python pyserial library to read the data.
Serial port settings are 19200bps, 7 data bits, odd parity, 1 stop bit. The supplied adapter also requires DTR=1 and RTS=0.
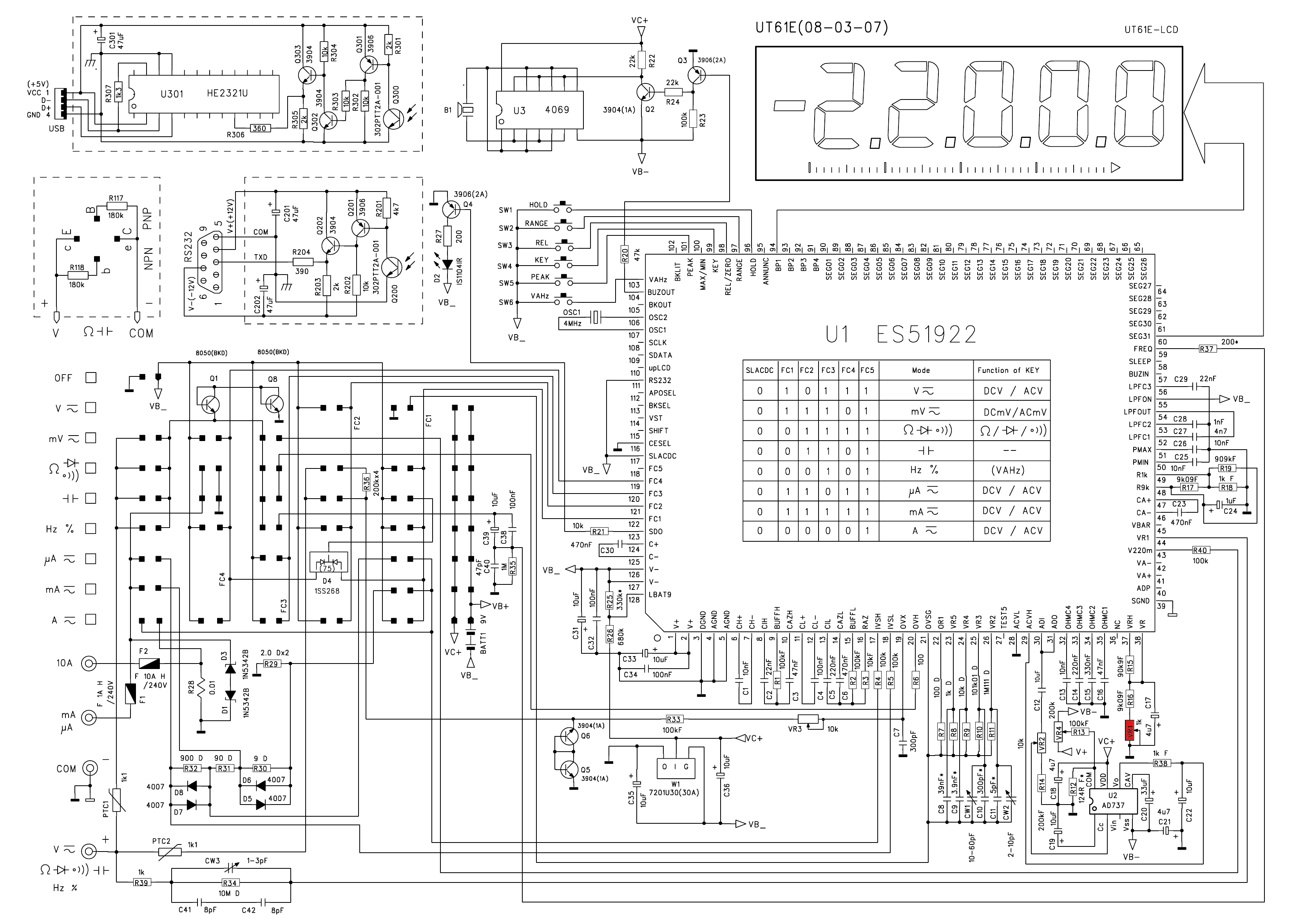
The DMM uses Cyrustek ES51922 chipset which is also used in other digital multimeters. My main source of information about its protocol was the UT61E data log in DMM.exe project by Henrik Haftmann.
Cyrustek ES51922 chipset has more features than are implemented in this project. This program implements only the features used by UT61E.
Each data packet contains 14 bytes.
Byte Meaning
==== =======
0x00 Measurement range
bit 6-3: always 0110
bit 2-0: measurement range. See byte 6 for details.
0x01 Digit 1
bit 6-4: always 011
bit 3-0
0000: 0
0001: 1
0010: 2
0011: 3
0100: 4
0101: 5
0110: 6
0111: 7
1000: 8
1001: 9
0x02 Digit 2
bit 6-4: always 011
bit 3-0: See byte 0x01
0x03 Digit 3
bit 6-4: always 011
bit 3-0: See byte 0x01
0x04 Digit 4
bit 6-4: always 011
bit 3-0: See byte 0x01
0x05 Digit 5
bit 6-4: always 011
bit 3-0: See byte 0x01
0x06 DMM mode
bit 6-4: always 011
bit 3-0: Measurement mode
Byte 6: 0xB 0x3 0x6 0x2 0xD 0xF 0x0 0x2
Byte 0: V, mV Ohm F Hz uA mA A %
0 2.2000 220.00 22.000n 220.00 220.00u 22.000m 10.000 100.0
1 22.000 2.2000k 220.00n 2200.0 2200.0u 220.00m - 100.0
2 220.00 22.000k 2.2000u - - - - -
3 1000.0 220.00k 22.000u 22.000k - - - 100.0
4 220.00m 2.200M 220.00u 220.00k - - - 100.0
5 - 22.000M 2.2000m 2.2000M - - - 100.0
6 - 220.00M 22.000m 22.000M - - - 100.0
7 - - 220.00m 220.00M - - - 100.0
0x07 Info flags
bit 6-4: always 011
bit 3: percent mode
bit 2: minus (negative value)
bit 1: low battery
bit 0: OL (overload)
0x08 Relative mode flags
bit 6-4: always 011
bit 3: MAX (unused in this project)
bit 2: MIN (unused in this project)
bit 1: relative mode (delta)
bit 0: [RMR] (unused in this project)
0x09 Limit flags
bit 6-4: always 011
bit 3: UL (underload)
bit 2: Peak max
bit 1: Peak min
bit 0: always 0
0x0A Voltage and auto range flags
bit 6-4: always 011
bit 3: DC measurement
bit 2: AC measurement
bit 1: auto range
bit 0: frequency measurement (Hz)
0x0B Hold
bit 6-4: always 011
bit 3: always 0
bit 2: VBAR (unused in this project)
bit 1: data hold
bit 0: LPF (unused in this project)
0x0C Footer, always 0x0D (\r)
0x0D Footer, always 0x0A (\n)
Each measurement value is encoded by 5 bytes which represent display digits.
Class constructor requires serial port name only. all other settings are defined by the following constants.
BAUD_RATE, BITS, PARITY, STOP_BITS: serial port settings (always 19200, 7 bits, odd parity, 1 stop bit).
TIMEOUT: serial port read timeout.
EOL: footer bytes of valid data packet. Always 0x0D 0x0D (CR, LF or \r\n).
RAW_DATA_LENGTH: data packet size.
READ_RETRIES: packet reading attempts. This value shows how many attempts to receive a valid packet should be made before returning an error.
The UT61E class contains the following functions:
read_raw_data(self): reads raw data packet from serial port as array of byte values.
is_data_valid(self, raw_data): returns True if the received packet is valid.
read_hex_str_data(self): returns string with hexadecimal byte values of the received packet.
get_meas(self): parses the received packet and returns the data as dicitonary (explained later).
normalize_val(self, val, units): normalizes the measured value to standard units (voltage to Volt, current to Ampere, resistance to Ohm, capacity to Farad, frequency to Herz, other values are not changed).
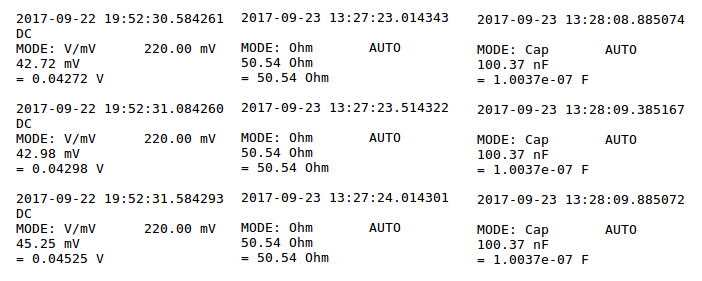
pretty_print(self, disp_norm_val = False): prints the received measurement in human readable form.
The received data is returned by get_meas() function as a dictionary with the following fields:
mode [string]: measurement mode,
range [string]: measurement range,
val [float]: displayed value,
units [string]: displayed units,
norm_val [float]: displayed value, normalized to standard units (Volt, Ampere, Ohm, Farad, Herz),
norm_units [string]: units of normalized value,
percent [boolean]: duty cycle (%) measurement,
minus [boolean]: negative value is displayed,
low_bat [boolean]: low battery indicator,
ovl [boolean]: OL is displayed,
delta [boolean]: relative measurement (delta),
ul [boolean]: UL is displayed,
max [boolean]: peak max value,
min [boolean]: peak min value,
dc [boolean]: DC voltage is measured,
ac [boolean]: AC voltage is measured,
auto [boolean]: auto range,
hz [boolean]: frequency measurement,
hold [boolean]: data hold active,
data_valid [bool]: True if data in the dictionary is valid.
PORT: default serial port which will be used if it is not specified in command line.
SLEEP_TIME: time between reading measurements.
The ut61e_monitor.py script is run from command line using the following command:
python ut61e_monitor.py [com_port_name]
where [com_port_name] is the name of serial port where your IR receiver is connected. In Windows it will be COM1, COM2 or another COM port. In Linux the will usually be /dev/ttyUSB0, /dev/ttyUSB1 etc. If not specified, the script will use port name stored in PORT constant.
- DMM.exe project by Henrik Haftmann
- UT61E data log by Henrik Haftmann
- UNI-T UT61E schematic
- Multimeter ICs/Cyrustek ES519xx in sigrok Wiki
- UT61E Protocol Description in GuShH's DevBlog
- Cyrustek ES51922 datasheet
- Uni-T UT60E RS-232 Data Logging
{kind=link}
You are more than welcome to contact me with any questions, suggestions or propositions regarding this project. You can:
- Visit my QRZ.COM page
- Visit my Facebook profile
- Write me an email to iosaaris =at= gmail dot com
73 de 4X1MD