This repository contains the code and documentation for a mobile Bluetooth-controlled robot car built using Arduino. The car can be remotely operated via a smartphone app, allowing users to control direction, speed, and other features wirelessly.
- Bluetooth Control: Operate the car from any distance within range of the Bluetooth signal.
- Directional Controls: Change the direction of the car using simple commands sent over Bluetooth.
- Speed Adjustment: Adjust the speed of the car to suit different terrains and driving conditions.
- Stability Enhancements: Includes features to improve stability during operation.
- An Arduino board (Uno, Mega, etc.)
- A Bluetooth module compatible with Arduino (HC-05/06)
- Additional components as listed in the hardware requirements section below
- A smartphone with Bluetooth capabilities
- Arduino Uno/Mega
- HC-05/06 Bluetooth Module
- DC Motor
- Motor Driver
- Wheels
- Battery
- Chassis
- Arduino IDE installed on your computer
- Smartphone app for controlling the car (details provided in the documentation)
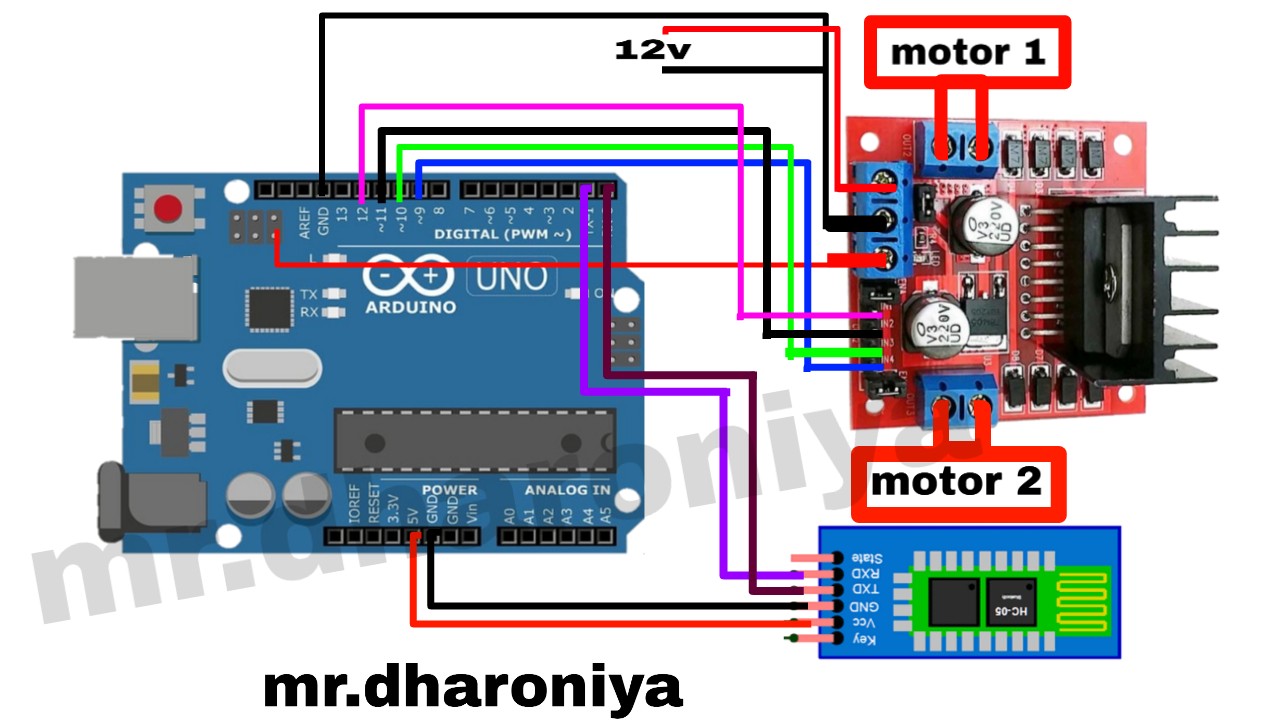
- Connect the Components: Follow the wiring diagram provided in the documentation to connect all the components together.
- Upload the Code: Open the Arduino IDE, select the correct board and port, then upload the provided code to your Arduino board.
- Pair Your Phone: Use your phone's Bluetooth settings to pair with the Bluetooth module connected to the Arduino.
- Install the App: Download and install the smartphone app used for controlling the car. Follow the app's instructions to connect to the Bluetooth module.
- Power On: Turn on the power supply to the Arduino and the motors.
- Open the App: Launch the smartphone app and ensure it's connected to the Bluetooth module.
- Control the Car: Use the app's interface to send commands to the car. This typically involves selecting a direction and adjusting the speed.
Contributions to this project are welcome. Please feel free to submit pull requests or report issues.