No good initial image pair found #1490
Comments
|
Pure forward motion is problematic for structure-from-motion as it leads to instable (and degenerate) configurations. There is a parameter ( You will probably get better results though if you also have turning in your dataset. |
Thanks for your kindly reply.Even if i set init_max_forward_motion=1,i still get the above error.If you need,i can send a mini-datasets to you to find out the reason. |
|
As I mentioned, forward motion is problematic for structure-from-motion (same for SLAM) as it leads to unstable results. |
|
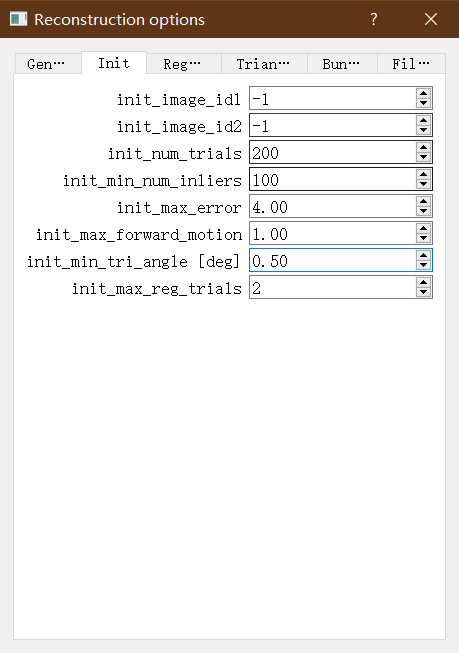
@lfxx Here is the setting of my test. The sparse reconstrction Forwar motion means that the z value of relative pose is larger, the triangulation angle is smaller. So the key to process images in such scene is to change the two thresholds. |



Is that saying i need to use multi-camera to get more pictures around car?or use one camera to get more pictures around car? |
I use your setting get pretty good results.Thanks! |
Hello.Now i want to use deep learning based method such as manydepth to predict depth since the default method in colmap is not good enough.How can i apply this depth to colmap? |
hi,i have the same problem as yours. I try to do 3D reconstruction on several kitti images which is alse the pure forward motion. I would like to know how you solve the problem at last. Appreciate for your help. |
Why are we setting it to 1.0? |
Because that is the maximum value. |
|
Oh. Because everything is on a relative scale? |
|
Hi,thanks for your excellent work.I use your repo to do reconstruction.But i get error above during feature matching.Some pictures in datasets are below:




These pictures are from camera which are installed on car.Could you give me some advice about how to do reconstruction on these pictures which are forward motion condition?
Any advice will be appreciated.I have struggled with this several days.
The text was updated successfully, but these errors were encountered: