This repository hosts, in a version controlled location, a snapshot of the research and development effort of the ACES Virtual Working Group on Gamut Mapping - 2020.
The Virtual Working Group proposal can be read in this document.
A Dropbox Workspace is available as the central location for sharing resources.
In order to make the ACES 1.3 Reference Gamut Compression available prior to its wider native implementation in DCCs, a set of implementations in various forms is available in the reference folder of this repo.
These implementations are intended only as a stop-gap, and should be considered deprecated once the algorithm is either implemented natively in a particular DCC, or OCIO 2.1+ is supported.
$ git clone https://github.com/colour-science/aces-vwg-gamut-mapping-2020.git
$ cd aces-vwg-gamut-mapping-2020
$ git submodule update --init --recursiveThe gamut mapping model selected by the Virtual Working Group is based on Smith (2020) - RGB Saturation Study Model.
The following implementations are available in the model directory:
- BlinkScript Kernel for The Foundry Nuke
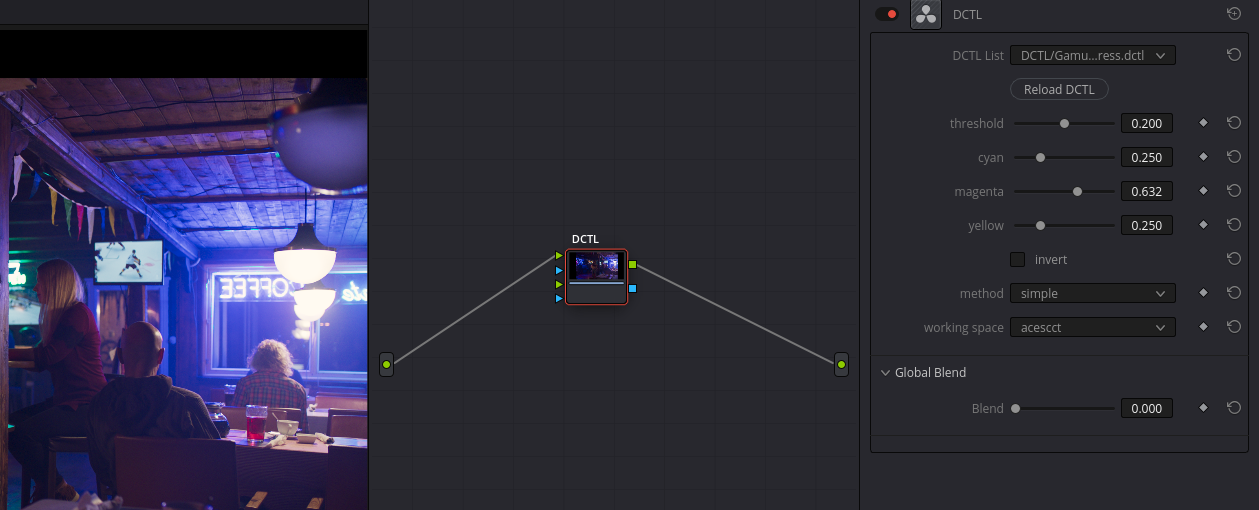
- DCTL for Davinci Resolve
- Fuse for Fusion Studio
- Matchbox GLSL for Autodesk Flame & Smoke
- Nuke Script for The Foundry Nuke
- Python Script for Numpy
This Google Colab notebook shows calculations for the threshold values needed to protect the colors of the ColorChecker24, as defined in table D.1 of SMPTE 2065-1, and the distance limits needed to map the entirety of a set of common camera encoding gamuts into AP1.
The research directory contains a mix of useful resources pertaining to research, experimentation and analysis conducted by the Virtual Working Group.
To review the gamut mapping model objectively, the Virtual Working Group has extended the OpenColorIO ACES Configuration and added the following views:
- ARRI ALF-2 (Rec.709)
- ARRI K1S1 (Rec.709)
- RED IPP2 (Rec.709)
- Filmlight TCAM (Rec.709)
Because of its size, the complete configuration is only available from an external repository branch, however, the required LUTs and diff for the config.ocio file are archived and under version control in this repository along with the original Filmlight Baselight grade display rendering transforms.
Discussions pertaining to the configuration can be read in the dedicated thread.
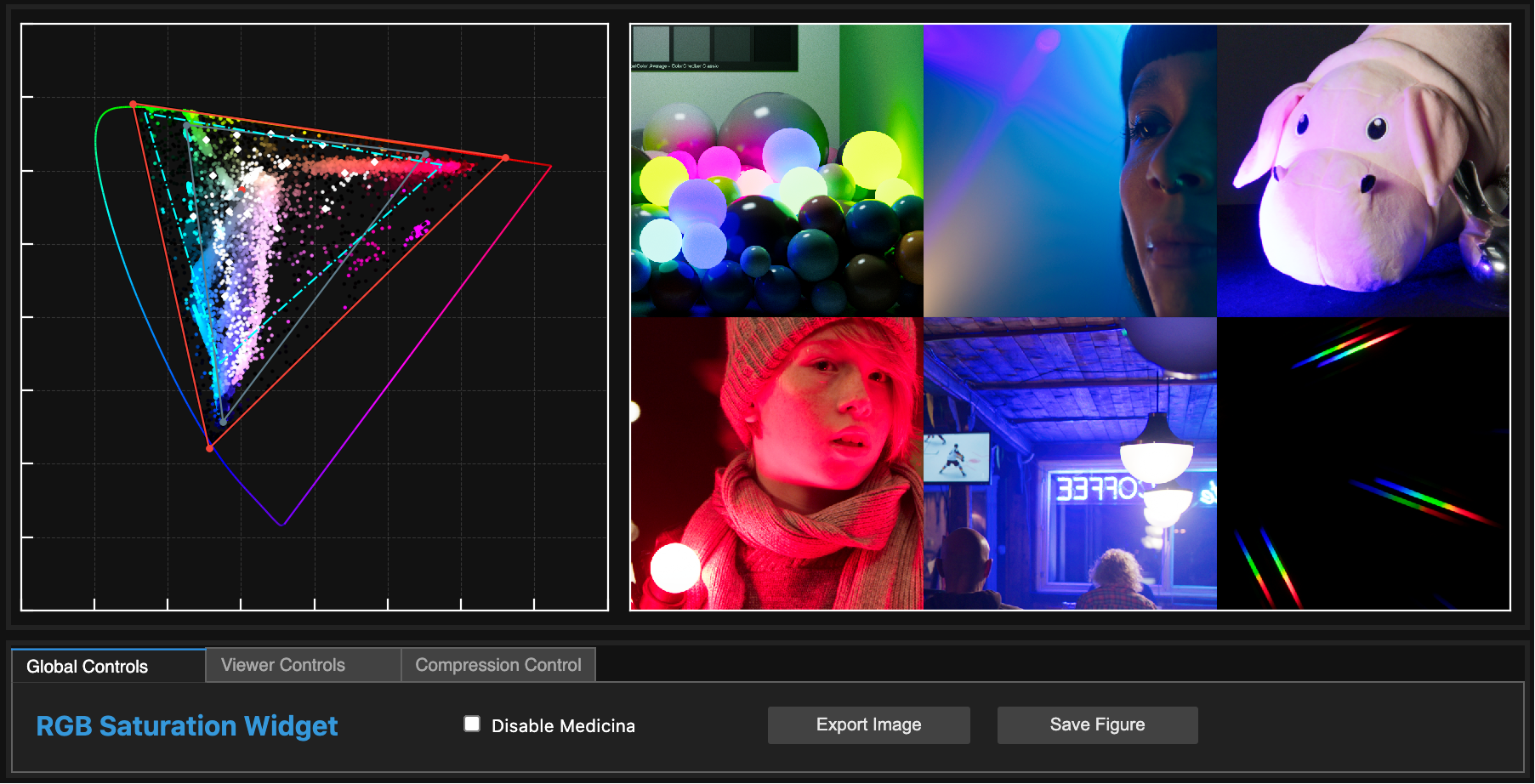
Smith (2020) - RGB Saturation Study Model is built on top of the RGB colourspace with the following approach:
- An achromatic axis is computed for the scene-referred RGB exposure values.
- The pseudo-distance between the individual 𝑅, 𝐺 and 𝐵 components and the achromatic axis is compressed with a cherry-picked compression function.
The model is extremely simple and elegant while offering good computational speed.
The following implementations are available:
Provides DCC implementation for :
Please refer to the repository README.md file for more information.

Provides Python implementation via Jupyter Notebooks.
Please refer to the repository README.rst file for more information.
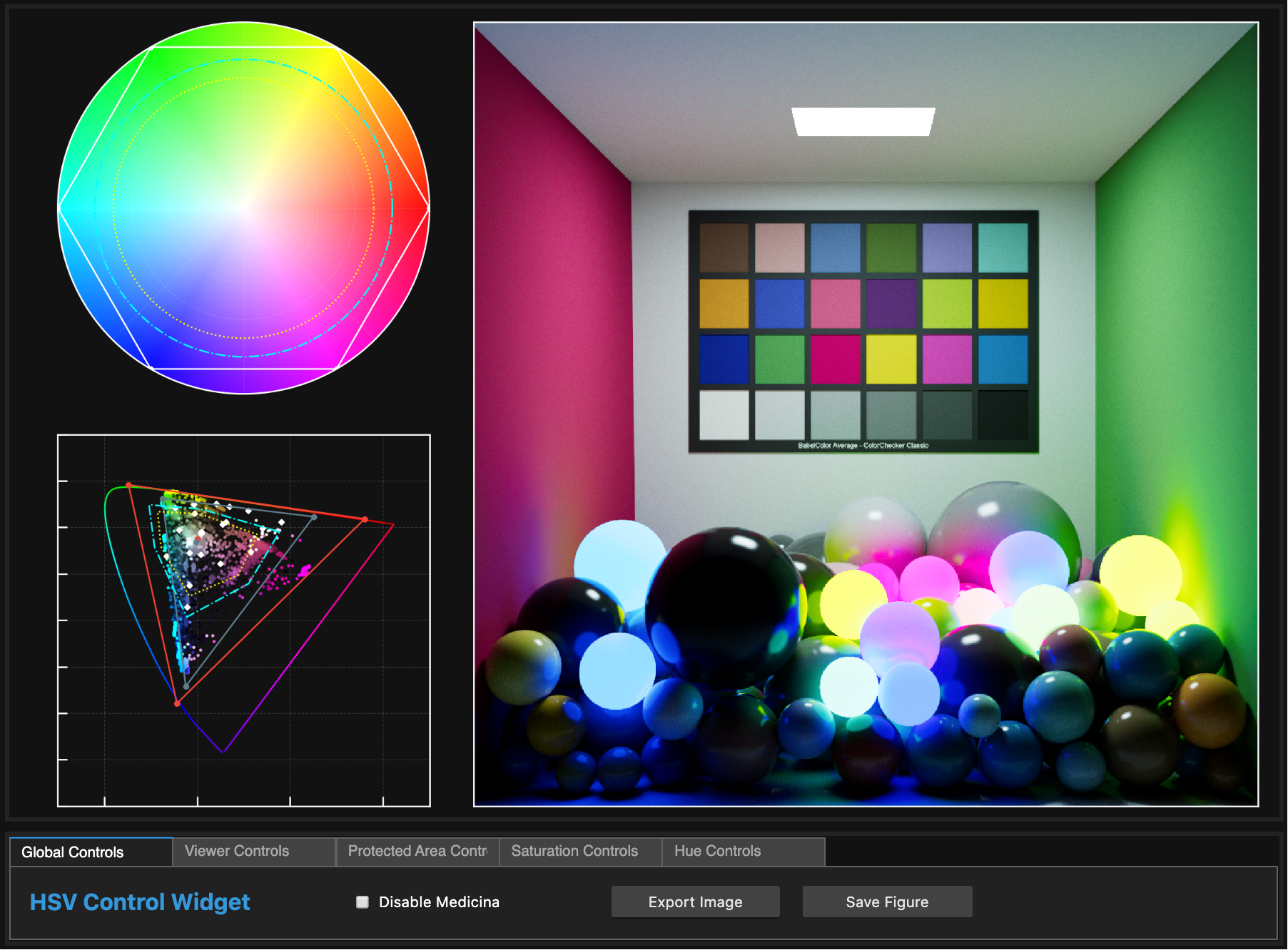
Mansencal and Scharfenberg (2020) HSV Control Based Study Model is built on top of the HSV colourspace with the following approach:
- Scene-referred RGB exposure values are converted to HSV.
- The saturation component 𝑆 is compressed with a cherry-picked compression function.
- The hue component 𝐻 is warped according to user defined control values.
- The HSV values are converted back to scene-referred RGB exposure values and then blended with the original scene-referred RGB exposure values function through a smoothstep function.
The model is much more complex and slower but offers direct controls over hue.
The following implementations are available:
Provides Python implementation via Jupyter Notebooks.
Please refer to the repository README.rst file for more information.
Johnson (2020) ARRI Gamut Mapping Study Model is focusing on ARRI colourspaces while adopting some principles from Smith (2020) model.
The following implementations are available:
Provides DCC implementation for The Foundry Nuke.
Please refer to the repository README.md file for more information.
A The Foundry Nuke script illustrating some examples of simplistic approaches to the gamut mapping problem by Matthias Scharfenberg.
A The Foundry Nuke script showcasing how the gamut mapping model can be represented by a 1D Shaper + 3D LUT combination.
A The Foundry Nuke script comparing gamut mapped hue lines by Matthias Scharfenberg.
A Jupyter Notebook exploring the concept of camera-referred "hue lines" by Sean Cooper.

The notebook is directly viewable at this url and an online Google Colab implementation is also available.
An online Google Colab showcasing the distortions of camera spectral sensitivities upon projection in the CIE 1931 Chromaticity Diagram by Troy Sobotka.
The notebook is also archived and under version control in this repository.
An assortment of Google Colab notebooks produced for the Virtual Working Group.
- Camera to Observer Mapping
- Compressiong Limits
- DCP Profile Primaries & Distance Limits
- Confidence Gamut
- Maximum Representable Value
- Mitsuba Spectral Image Rendering
- Mitsuba Image Processing
- Spectral Images Generation
- Spectral Images Processing
The notebooks are also archived and under version control in this repository along with the DCP_Profiles_Data.json file generated by the DCP Profile Primaries & Distance Limits notebook.
Some notebooks have companion hosted pages:
- https://academy-vwg-gm-hyper-spectral-images.imfast.io/
- https://academy-vwg-gm-mitsuba-spectral-images.imfast.io/
- https://academy-vwg-gm-spectral-spheres.imfast.io/
For Third Party license details see THIRD_PARTY.
The ACES - Virtual Working Group - Gamut Mapping - 2020 Repository is provided by the Academy under the following terms and conditions:
Copyright © 2020 Academy of Motion Picture Arts and Sciences ("A.M.P.A.S."). Portions contributed by others as indicated. All rights reserved.
A worldwide, royalty-free, non-exclusive right to copy, modify, create derivatives, and use, in source and binary forms, is hereby granted, subject to acceptance of this license. Performance of any of the aforementioned acts indicates acceptance to be bound by the following terms and conditions:
Copies of source code, in whole or in part, must retain the above copyright notice, this list of conditions and the Disclaimer of Warranty.
Use in binary form must retain the above copyright notice, this list of conditions and the Disclaimer of Warranty in the documentation and/or other materials provided with the distribution.
Nothing in this license shall be deemed to grant any rights to trademarks, copyrights, patents, trade secrets or any other intellectual property of A.M.P.A.S. or any contributors, except as expressly stated herein.
Neither the name "A.M.P.A.S." nor the name of any other contributors to this software may be used to endorse or promote products derivative of or based on this software without express prior written permission of A.M.P.A.S. or the contributors, as appropriate.
This license shall be construed pursuant to the laws of the State of California, and any disputes related thereto shall be subject to the jurisdiction of the courts therein.
Disclaimer of Warranty: THIS SOFTWARE IS PROVIDED BY A.M.P.A.S. AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, AND NON-INFRINGEMENT ARE DISCLAIMED. IN NO EVENT SHALL A.M.P.A.S., OR ANY CONTRIBUTORS OR DISTRIBUTORS, BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, RESITUTIONARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
WITHOUT LIMITING THE GENERALITY OF THE FOREGOING, THE ACADEMY SPECIFICALLY DISCLAIMS ANY REPRESENTATIONS OR WARRANTIES WHATSOEVER RELATED TO PATENT OR OTHER INTELLECTUAL PROPERTY RIGHTS IN THE RAW TO ACES UTILITY REFERENCE IMPLEMENTATION, OR APPLICATIONS THEREOF, HELD BY PARTIES OTHER THAN A.M.P.A.S., WHETHER DISCLOSED OR UNDISCLOSED.