Use VoxelNext to training custom dataset #4
Comments
|
Hi Yibo, Thanks for your interest in our work. After carefully reading your issue, I suggest that there are two choices to try. 1. Disable IoU branch And remove 2. Try VoxelNeXt backbone with other head. In addition, I am very happy for more discussion via WeChat. I will contact you latter. Regards, |
|
Hi @luoxiaoliaolan, @yukang2017 I have problem in training custom dataset. My dataset has only Lidar (x, y, z), and it works normally with Second, Pointpillar, PVRCNN config, but with VoxelNext It wont work. I tried and have the same errors as you. Would you guide me abit to fix it. Thank you both! |
Hello Yukangchen, thank you for your excellent work in the field of 3D detection and tracking. I carefully studied this repo project as soon as it was released, and I am very interested in the new backbone network VoxelNext. The network structure is concise and similar to VoxelRCNN. I tried to use VoxelNext to train my own dataset and see how it performs. My dataset is in a format similar to KITTI, with four dimensions for each point cloud frame: x, y, z, intensity, and annotation files divided into 11 classes. I have completed the related modules for the custom dataloader, and I can load the data for training normally and generate the corresponding pkl files after preprocessing. However, I encountered the following problem at the beginning of training:
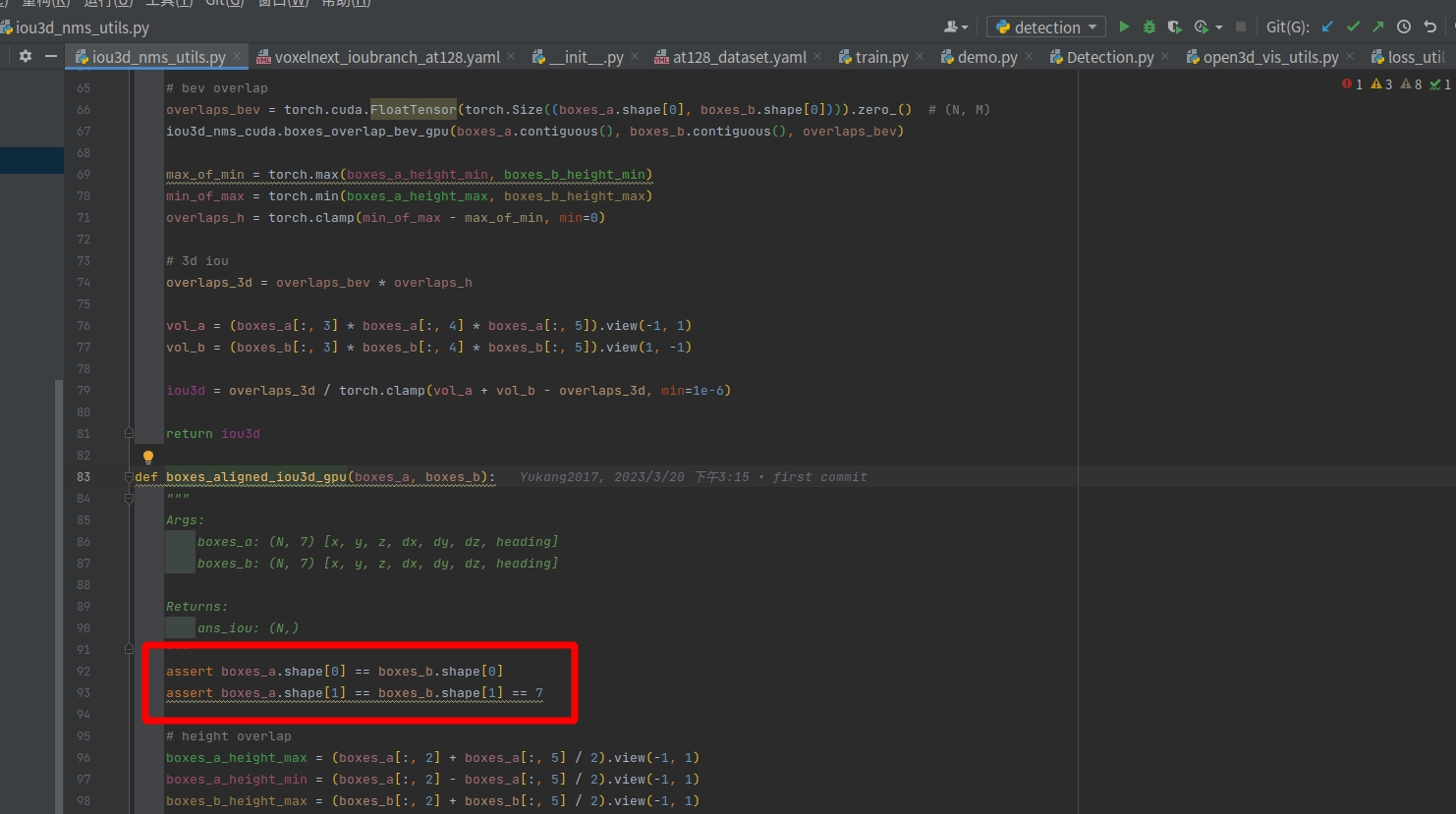
assert boxes_a.shape[0] == boxes_b.shape[0]
I have checked the progress of training my own data, and the error did not occur at the beginning but when running a certain frame, where boxes_a.shape[0] is 142 and boxes_b.shape[0] is 143. This caused an error and abnormal calculation of the IOU loss. Then I considered that this might be a data issue, but it only occurred in a very small number of data. I wonder if it is possible to ignore these data and set the loss to 0 when encountering such cases, without affecting the loss calculation of other normal data.
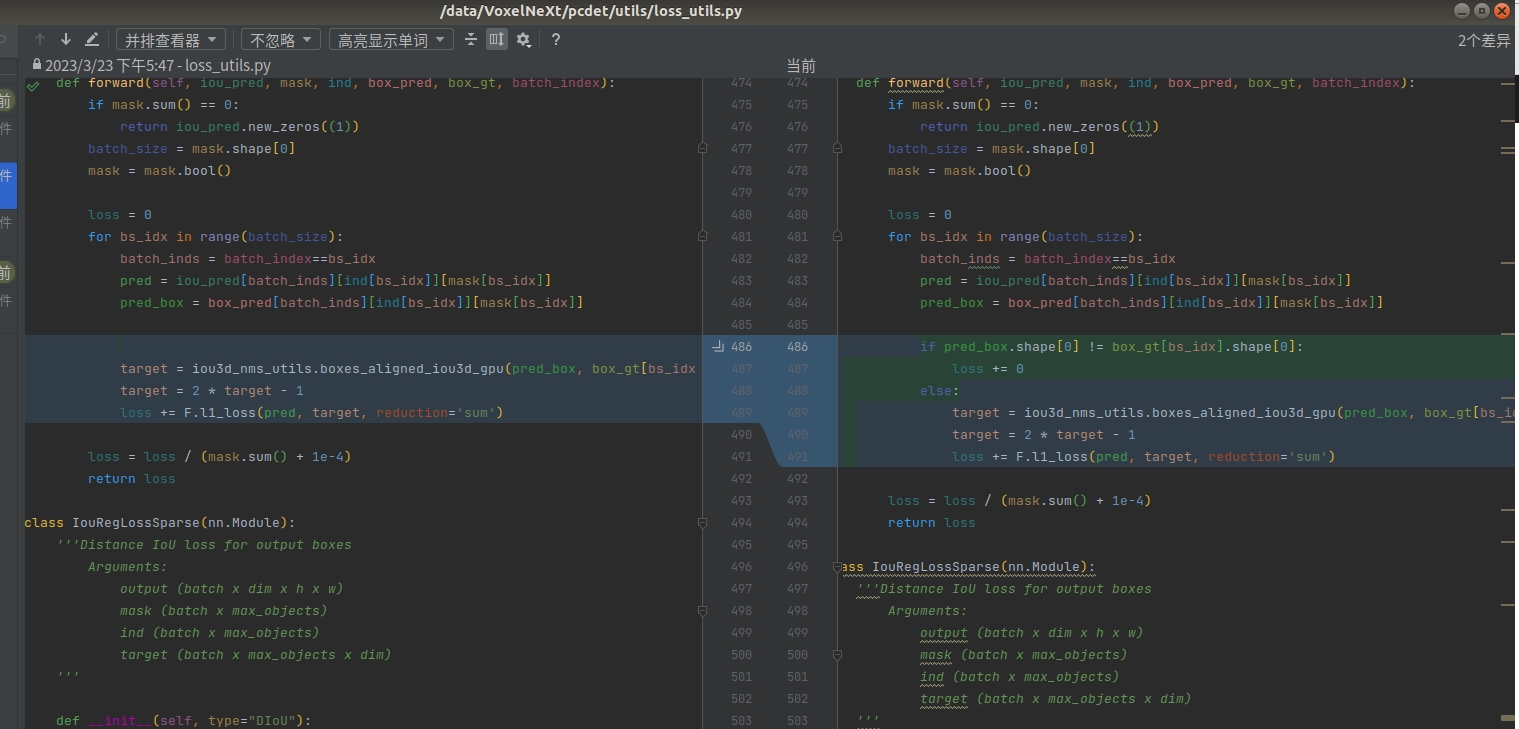
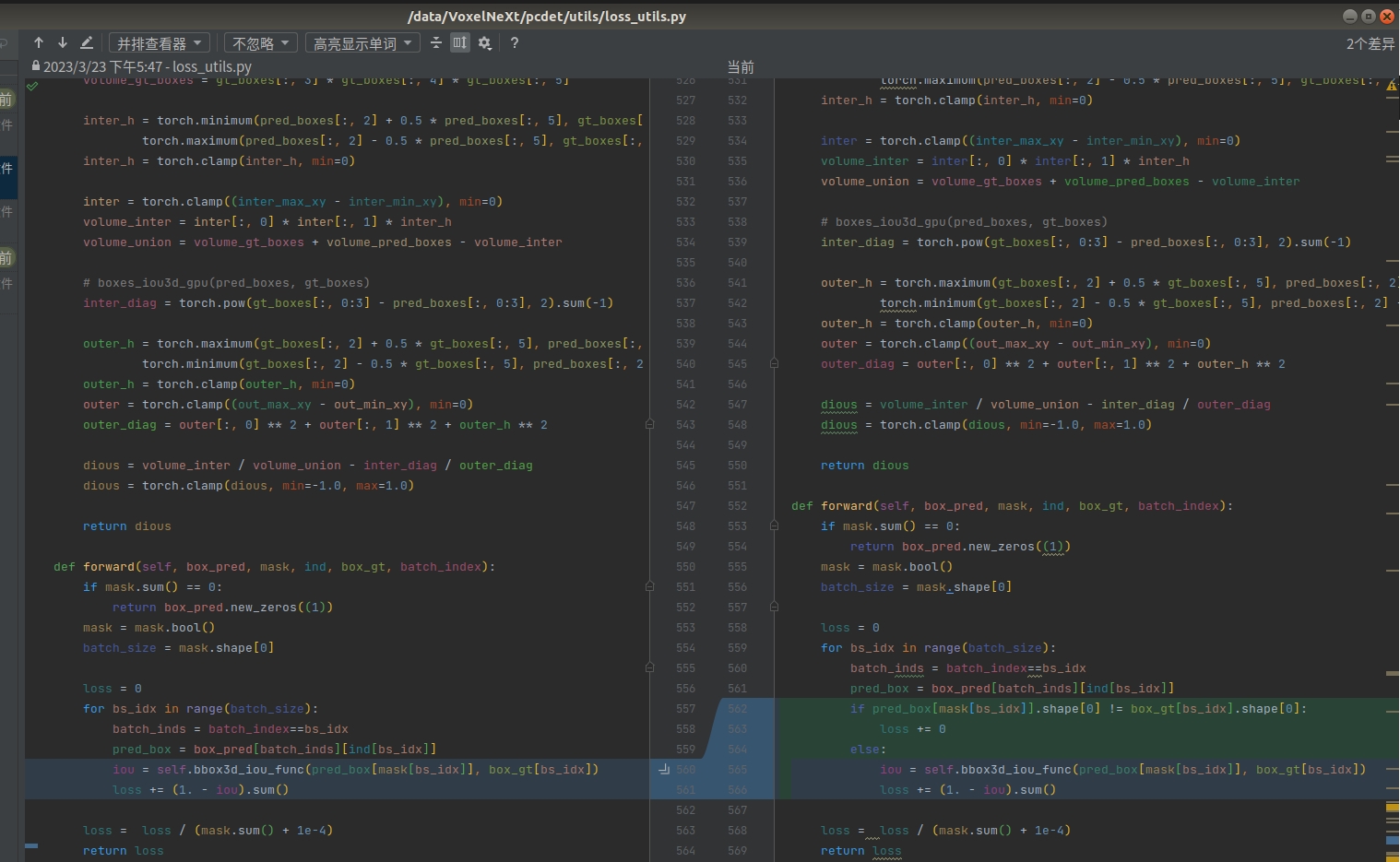
So I modified the code to the following form:
After I made the modifications, the training was able to proceed normally. I don't know if these changes could have introduced any errors. After training a batch of data today, I obtained the trained model. However, when I tried to load the trained model for inference, I encountered a problem where the scores of the detection boxes were extremely low, less than 0.1. As a result, when I set the input score threshold for post-processing to be greater than 0.1, no detection results were outputted. I'm not sure what the reason for this is, so I was wondering if you could help me analyze it.
I will continue to follow up on your project and hope to have more discussions with you. Below are my data and model configuration files:
voxelnext_ioubranch.yaml:
`CLASS_NAMES: ['car', 'pedestrian', 'cyclist', 'tricyclist', 'bus', 'truck', 'special_vehicle', 'traffic_cone',
'small_obstacle', 'traffic_facilities', 'other']
DATA_CONFIG:
BASE_CONFIG: cfgs/dataset_configs/at128_dataset.yaml
OUTPUT_PATH: '/lpai/output/models'
MODEL:
NAME: VoxelNeXt
NMS_THRESH: [0.8, 0.55, 0.55] #0.7
NMS_PRE_MAXSIZE: [2048, 1024, 1024] #[4096]
NMS_POST_MAXSIZE: [200, 150, 150] #500
OPTIMIZATION:
BATCH_SIZE_PER_GPU: 26
NUM_EPOCHS: 50
custom_dataset.yaml:DATASET: 'At128Dataset'DATA_PATH: '/lpai/volumes/lpai-autopilot-root/autopilot-cloud/lidar_at128_dataset_1W/autopilot-cloud/lidar_at128_dataset_1W'
POINT_CLOUD_RANGE: [0.0, -40, -2, 150.4, 40, 4]
DATA_SPLIT: {
'train': train,
'test': val
}
INFO_PATH: {
'train': [at128_infos_train.pkl],
'test': [at128_infos_val.pkl],
}
BALANCED_RESAMPLING: True
GET_ITEM_LIST: ["points"]
DATA_AUGMENTOR:
DISABLE_AUG_LIST: ['placeholder']
AUG_CONFIG_LIST:
- NAME: gt_sampling
DB_INFO_PATH:
- at128_dbinfos_train.pkl
USE_SHARED_MEMORY: False
PREPARE: {
filter_by_min_points: ['car:12', 'pedestrian:8', 'cyclist:10', 'tricyclist:15', 'bus:40', 'truck:30', 'special_vehicle:35',
'traffic_cone:10', 'small_obstacle:7', 'traffic_facilities:11', 'other:16']
}
POINT_FEATURE_ENCODING: {
encoding_type: absolute_coordinates_encoding,
used_feature_list: ['x', 'y', 'z', 'intensity'],
src_feature_list: ['x', 'y', 'z', 'intensity'],
}
DATA_PROCESSOR:
- NAME: mask_points_and_boxes_outside_range
REMOVE_OUTSIDE_BOXES: True
If possible, feel free to add me on WeChat or contact me through email. Let's discuss together.
Wechat: lyb543918165
Email: lybluoxiao@163.com
The text was updated successfully, but these errors were encountered: