Different acceleration of mocap welded body joints between MuJoCo 2.3.7 and MuJoCo 3 #1483
Comments
|
Hi, I tried loading your model but I only see the robot arm? Anyway, do you have contacts in your example? If so, can you repeat the test without the Also, I can't see your videos. |
|
Hi, thank you for looking into my issue! Indeed, in the minimal model I've provided there is just the robot arm because the rest of the objects (like the table / cube etc) that are present in the real environment aren't actually needed to demonstrate the issue, so I removed them in accordance with the issue submission guidelines. However it was faster for me to take screenshots and record video in the real environment hence that discrepancy. But the issue is with the hand control itself, which is demonstrated by the minimal model and script. Regarding the videos, my apologies. I am using Safari where they load fine but you are right that on Chrome they seem to not load. Here is a second attempt after re-encoding to .webm: Thank you for pointing my attention to the geom |
|
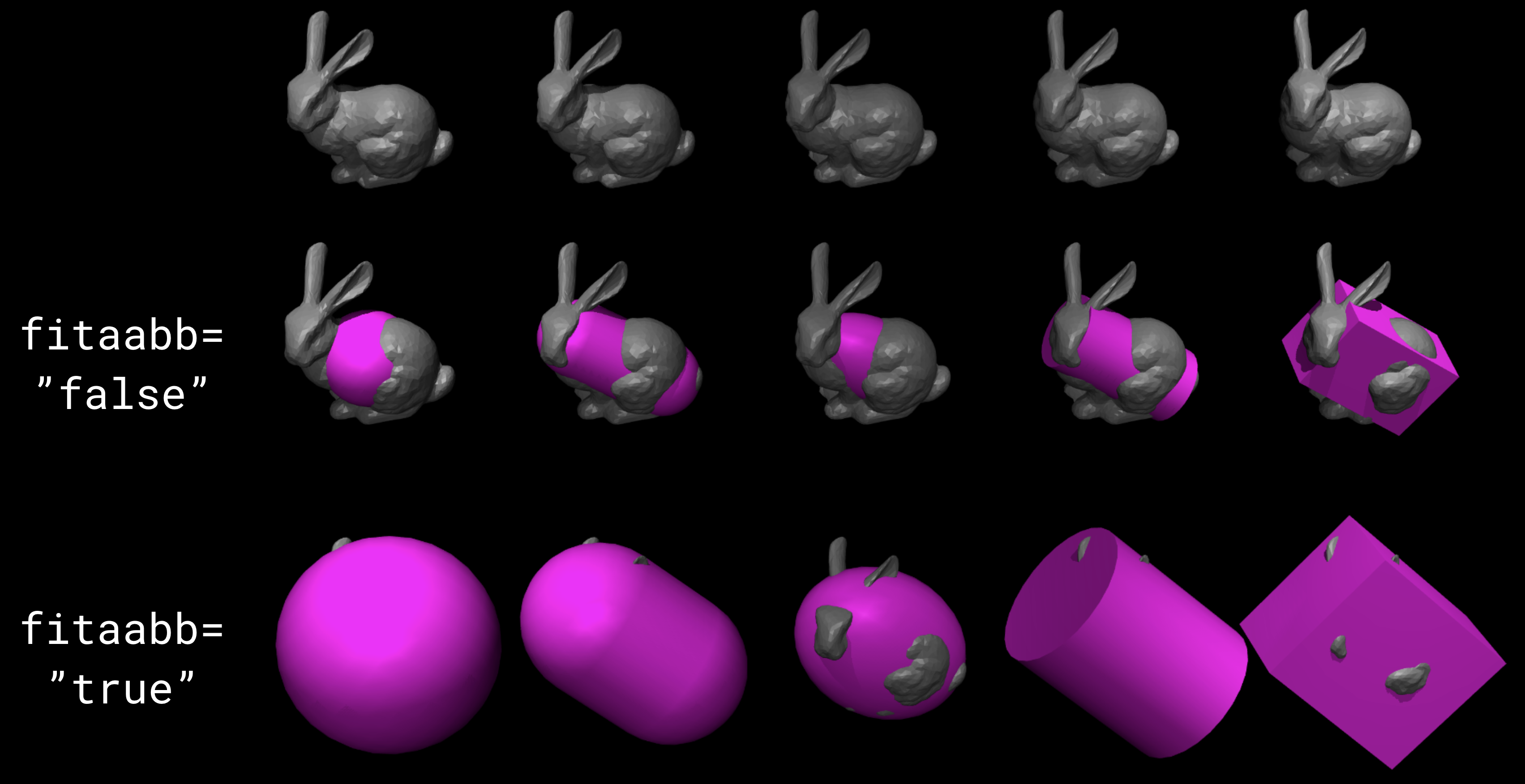
I now suspect this might be the result of bug fix 12 in 3.1.0. Could you please compare 3.0.1 and 3.1.0 to help us narrow it down? Can you please make a minimal model (ideally with no meshes, you can ask MuJoCo to approximate meshes as primitives and save the XML), and also without any required Python code? You can add keyframes to you model which set the state. Such that you can say: load this model in these two versions, load keyframe 0 and see large differences in the trajectory. Another reason to approximate the meshes as primitives, besides making our life a bit easier, is that is would disambiguate my hypothesis above that the change is due to changed inertias computed from meshes. If the hypothesis is true then after conversion to primitives the difference will disappear. |
As per your suggestion I did just re-run the reproduction script on both 3.0.1 and 3.1.0 (versions I hadn't tested before) and their output in terms of This was no surprise, as I initially discovered the issue trying to upgrade from 2.3.7 -> 3.1.2. The reason I went down from 3.1.2 to 3.0.0 when testing was precisely to help with narrowing down which version exactly causes the difference in behaviour. Which seems to indeed be 3.0.0.
I am keen to attempt this but I am not sure how to ask MuJoCo to approximate the meshes? I looked through MuJoCo's API but I can't find any options for loadXML or similar functions that would do that, and neither can I see anything in the Simulate utility. |
|
Corresponding image from the changelog: https://mujoco.readthedocs.io/en/latest/_images/meshfit.png |
{kind=link}
|
Thank you for linking those resources, very informative! I didn't think to look into the XML for options regarding this. Taking a closer look at the model trying to implement this "mesh fitting" and remove meshes, I realised that actually in this instance meshes are purely cosmetic for video rendering: they have no collision and really the relevant physics are done by hidden primitives. So, I simply removed all the meshes (and also other assets like textures), and the issue still seems to be the same. This is the new "minimal" model<mujoco>
<option timestep='0.0025' iterations="50" tolerance="1e-10" solver="Newton" jacobian="dense" cone="elliptic"/>
<compiler angle="radian" inertiafromgeom="auto" inertiagrouprange="4 5"/>
<keyframe>
<key name="issue_0" mpos="0 0.6 0.2" mquat="1 0 1 0"/>
<key name="issue_1" mpos="0 0.6 0.2" mquat="1 0 1 0" time="0.125"/>
</keyframe>
<asset>
<texture type="skybox" builtin="gradient" rgb1=".50 .495 .48" rgb2=".50 .495 .48" width="32" height="32"/>
<material name="xyz_col" rgba="0.3 0.3 1.0 0.5" shininess="0" specular="0.5"/>
</asset>
<default>
<default class="xyz_base">
<joint armature="0.001" damping="2" limited="true"/>
<position ctrllimited="true" ctrlrange="0 1.57"/>
<default class="base_col">
<geom conaffinity="1" condim="4" contype="1" group="4" material="xyz_col" solimp=".8 .9 .01" solref=".02 1"/>
</default>
</default>
</default>
<worldbody>
<light castshadow="false" directional='true' diffuse='.3 .3 .3' specular='0.3 0.3 0.3' pos='-1 -1 1'
dir='1 1 -1'/>
<light directional='true' diffuse='.3 .3 .3' specular='0.3 0.3 0.3' pos='1 -1 1' dir='-1 1 -1'/>
<light castshadow="false" directional='true' diffuse='.3 .3 .3' specular='0.3 0.3 0.3' pos='0 1 1'
dir='0 -1 -1'/>
<geom name="floor" size="4 4 .1" pos="0 0 -.913" conaffinity="1" contype="1" type="plane"
condim="3"/>
<!-- Arm -->
<body name="base" childclass="xyz_base" pos="0 0 0">
<site name="basesite" pos="0 0 0" size="0.01" />
<inertial pos="0 0 0" mass="0" diaginertia="0 0 0" />
<body name="controller_box" pos="0 0 0">
<inertial pos="-0.325 0 -0.38" mass="46.64" diaginertia="1.71363 1.27988 0.809981" />
<geom size="0.11 0.2 0.265" pos="-0.325 0 -0.38" type="box" rgba="0.2 0.2 0.2 1"/>
</body>
<body name="pedestal_feet" pos="0 0 0">
<inertial pos="-0.1225 0 -0.758" mass="167.09" diaginertia="8.16095 9.59375 15.0785" />
<geom size="0.385 0.35 0.155" pos="-0.1225 0 -0.758" type="box" rgba="0.2 0.2 0.2 1"
contype="0"
conaffinity="0"
/>
</body>
<body name="torso" pos="0 0 0">
<inertial pos="0 0 0" mass="0.0001" diaginertia="1e-08 1e-08 1e-08" />
<geom size="0.05 0.05 0.05" type="box" contype="0" conaffinity="0" group="1" rgba="0.2 0.2 0.2 1" />
</body>
<body name="pedestal" pos="0 0 0">
<inertial pos="0 0 0" quat="0.659267 -0.259505 -0.260945 0.655692" mass="60.864" diaginertia="6.0869 5.81635 4.20915" />
<geom size="0.18 0.31" pos="-0.02 0 -0.29" type="cylinder" rgba="0.2 0.2 0.2 1" />
</body>
<body name="right_arm_base_link" pos="0 0 0">
<inertial pos="-0.0006241 -2.8025e-05 0.065404" quat="-0.209285 0.674441 0.227335 0.670558" mass="2.0687" diaginertia="0.00740351 0.00681776 0.00672942" />
<geom size="0.08 0.12" pos="0 0 0.12" type="cylinder" rgba="0.5 0.1 0.1 1" />
<body name="right_l0" pos="0 0 0.08">
<inertial pos="0.024366 0.010969 0.14363" quat="0.894823 0.00899958 -0.170275 0.412573" mass="5.3213" diaginertia="0.0651588 0.0510944 0.0186218" />
<joint name="right_j0" pos="0 0 0" axis="0 0 1" limited="true" range="-3.0503 3.0503" damping="10"/>
<body name="head" pos="0 0 0.2965">
<inertial pos="0.0053207 -2.6549e-05 0.1021" quat="0.999993 7.08405e-05 -0.00359857 -0.000626247" mass="1.5795" diaginertia="0.0118334 0.00827089 0.00496574" />
<body name="screen" pos="0.03 0 0.105" quat="0.5 0.5 0.5 0.5">
<inertial pos="0 0 0" mass="0.0001" diaginertia="1e-08 1e-08 1e-08" />
<geom size="0.12 0.07 0.001" type="box" contype="0" conaffinity="0" group="1" rgba="0.2 0.2 0.2 1" />
</body>
</body>
<body name="right_torso_itb" pos="-0.055 0 0.22" quat="0.707107 0 -0.707107 0">
<inertial pos="0 0 0" mass="0.0001" diaginertia="1e-08 1e-08 1e-08" />
</body>
<body name="right_l1" pos="0.081 0.05 0.237" quat="0.5 -0.5 0.5 0.5">
<inertial pos="-0.0030849 -0.026811 0.092521" quat="0.424888 0.891987 0.132364 -0.0794296" mass="4.505" diaginertia="0.0224339 0.0221624 0.0097097" />
<joint name="right_j1" pos="0 0 0" axis="0 0 1"
limited="true" range="-3.8 -0.5"
damping="10"/>
<body name="right_l2" pos="0 -0.14 0.1425" quat="0.707107 0.707107 0 0">
<inertial pos="-0.00016044 -0.014967 0.13582" quat="0.707831 -0.0524761 0.0516007 0.702537" mass="1.745" diaginertia="0.0257928 0.025506 0.00292515" />
<joint name="right_j2" pos="0 0 0" axis="0 0 1" limited="true" range="-3.0426 3.0426" damping="10"/>
<geom size="0.06 0.17" pos="0 0 0.08" type="cylinder" rgba="0.5 0.1 0.1 1" />
<body name="right_l3" pos="0 -0.042 0.26" quat="0.707107 -0.707107 0 0">
<site name="armsite" pos="0 0 0" size="0.01" />
<inertial pos="-0.0048135 -0.0281 -0.084154" quat="0.902999 0.385391 -0.0880901 0.168247" mass="2.5097" diaginertia="0.0102404 0.0096997 0.00369622" />
<joint name="right_j3" pos="0 0 0" axis="0 0 1" limited="true" range="-3.0439 3.0439" damping="10"/>
<body name="right_l4" pos="0 -0.125 -0.1265" quat="0.707107 0.707107 0 0">
<inertial pos="-0.0018844 0.0069001 0.1341" quat="0.803612 0.031257 -0.0298334 0.593582" mass="1.1136" diaginertia="0.0136549 0.0135493 0.00127353" />
<joint name="right_j4" pos="0 0 0" axis="0 0 1" limited="true" range="-2.9761 2.9761" damping="10" />
<geom size="0.045 0.15" pos="0 0 0.11" type="cylinder" rgba="0.5 0.1 0.1 1" />
<body name="right_arm_itb" pos="-0.055 0 0.075" quat="0.707107 0 -0.707107 0">
<inertial pos="0 0 0" mass="0.0001" diaginertia="1e-08 1e-08 1e-08" />
</body>
<body name="right_l5" pos="0 0.031 0.275" quat="0.707107 -0.707107 0 0">
<inertial pos="0.0061133 -0.023697 0.076416" quat="0.404076 0.9135 0.0473125 0.00158335" mass="1.5625" diaginertia="0.00474131 0.00422857 0.00190672" />
<joint name="right_j5" pos="0 0 0" axis="0 0 1" limited="true" range="-2.9761 2.9761" damping="10"/>
<body name="right_wrist" pos="0 0 0.10541" quat="0.707107 0.707107 0 0">
<inertial pos="0 0 0.10541" quat="0.707107 0.707107 0 0" mass="0" diaginertia="0 0 0" />
</body>
<body name="right_l6" pos="0 -0.11 0.1053" quat="0.0616248 0.06163 -0.704416 0.704416">
<inertial pos="-8.0726e-06 0.0085838 -0.0049566" quat="0.479044 0.515636 -0.513069 0.491322" mass="0.3292" diaginertia="0.000360258 0.000311068 0.000214974" />
<joint name="right_j6" pos="0 0 0" axis="0 0 1" limited="true" range="-4.7124 4.7124" damping="10"/>
<geom size="0.055 0.025" pos="0 0.015 -0.01" type="cylinder" rgba="0.5 0.1 0.1 1" />
<body name="right_hand" pos="0 0 0.0245" quat="0.707107 0 0 0.707107">
<inertial pos="1e-08 1e-08 1e-08" quat="0.820473 0.339851 -0.17592 0.424708" mass="1e-08" diaginertia="1e-08 1e-08 1e-08" />
<geom size="0.035 0.014" pos="0 0 0.015" type="cylinder" rgba="0 0 0 1"/>
<body name="hand" pos="0 0 0.12" quat="-1 0 1 0">
<site name="endEffector" pos="0.04 0 0" size="0.01" rgba='1 1 1 1' />
<geom name="rail" type="box" pos="-0.05 0 0" density="7850" size="0.005 0.055 0.005" rgba="0.5 0.5 0.5 1.0" condim="3" friction="2 0.1 0.002" />
<body name="rightclaw" pos="0 -0.05 0" >
<geom class="base_col" name="rightclaw_it" condim="4" type="box" user="0" pos="0 0 0" size="0.045 0.003 0.015" rgba="1 1 1 1.0" />
<joint name="r_close" pos="0 0 0" axis="0 1 0" range= "0 0.04" armature="100" damping="1000" limited="true" type="slide"/>
<site name="rightEndEffector" pos="0.045 0 0" size="0.01" rgba="1.0 0.0 0.0 1.0"/>
<body name="rightpad" pos ="0 .003 0" >
<geom name="rightpad_geom" condim="4" type="box" user="0" pos="0 0 0" size="0.045 0.003 0.015" rgba="1 1 1 1.0" solimp="0.95 0.99 0.01" solref="0.01 1" friction="2 0.1 0.002" contype="1" conaffinity="1" mass="1"/>
</body>
</body>
<body name="leftclaw" pos="0 0.05 0">
<geom class="base_col" name="leftclaw_it" condim="4" type="box" user="0" pos="0 0 0" size="0.045 0.003 0.015" rgba="0 1 1 1.0" />
<joint name="l_close" pos="0 0 0" axis="0 1 0" range= "-0.03 0" armature="100" damping="1000" limited="true" type="slide"/>
<site name="leftEndEffector" pos="0.045 0 0" size="0.01" rgba="1.0 0.0 0.0 1.0"/>
<body name="leftpad" pos ="0 -.003 0" >
<geom name="leftpad_geom" condim="4" type="box" user="0" pos="0 0 0" size="0.045 0.003 0.015" rgba="0 1 1 1.0" solimp="0.95 0.99 0.01" solref="0.01 1" friction="2 0.1 0.002" contype="1" conaffinity="1" />
</body>
</body>
</body>
</body>
</body>
</body>
<body name="right_l4_2" pos="0 0 0">
<inertial pos="1e-08 1e-08 1e-08" quat="0.820473 0.339851 -0.17592 0.424708" mass="1e-08" diaginertia="1e-08 1e-08 1e-08" />
</body>
</body>
</body>
<body name="right_l2_2" pos="0 0 0">
<inertial pos="1e-08 1e-08 1e-08" quat="0.820473 0.339851 -0.17592 0.424708" mass="1e-08" diaginertia="1e-08 1e-08 1e-08" />
</body>
</body>
<body name="right_l1_2" pos="0 0 0">
<inertial pos="1e-08 1e-08 1e-08" quat="0.820473 0.339851 -0.17592 0.424708" mass="1e-08" diaginertia="1e-08 1e-08 1e-08" />
<geom size="0.07 0.07" pos="0 0 0.035" type="cylinder" rgba="0.2 0.2 0.2 1"/>
</body>
</body>
</body>
</body>
</body>
<body mocap="true" name="mocap" pos="0 0 0">
<geom conaffinity="0" contype="0" pos="0 0 0" rgba="0.0 0.5 0.5 1" size="0.01" type="sphere"></geom>
<site name="mocap" pos="0 0 0" rgba="0.0 0.5 0.5 1" size="0.01" type="sphere"></site>
</body>
</worldbody>
<!-- Control -->
<equality>
<weld body1="mocap" body2="hand" solref="0.02 1"></weld>
</equality>
</mujoco>I also added a couple keyframes trying to emulate what I'm doing in the Python script: setting the mocap pos and quat at time 0 as a first keyframe, and keeping it there for 50 timesteps worth as a second keyframe. I could not really get this to visualise properly in the Either way, even completely without any meshes, all the |
|
@yuvaltassa @quagla just wondering what the next steps are for this. @evangelos-ch and I work together on Meta-World and we are hoping to make a release in the near future. Thanks in advance. |
|
Hi @quagla is there any update on this? |
Hi,
I'm a PhD Student also working on maintaining the Metaworld multi-task / meta RL benchmark, which is built by simulating a Sawyer arm and various tasks in MuJoCo. Currently I'm trying to migrate the environment to MuJoCo 3, hoping to leverage MJX, which would be very beneficial in this setting.
Following the issue instructions, I'm attaching a minimal model that illustrates the problem as a .zip file (model.zip). I also have a minimal issue reproduction repo here.
In this MuJoCo model, in order to pass control signals from an RL agent or a scripted policy to the robot arm we use a mocap body which is welded to the end effector. Then we can set
mjData.mocap_posandmjData.mocap_quat(although the latter is always static in this specific case) to the desired position, simulate, and hopefully the robot arm moves accordingly. Here is a script using the Python bindings demonstrating what I mean (that can also be used to demonstrate the discrepancy across versions):With the exact same model and code, in MuJoCo 2.3.7 we get the following output:
And in MuJoCo 3.X (tested with MuJoCo 3.0.0 and 3.1.3, output was identical):
Specifically, I notice the
qaccis drastically different for joints 4, 5 and 6 (0-indexed), which belong to the bodiesright_l4,right_l5andright_l6in the model, accordingly. After doing my best to patiently comparemjModelandMjDatastate and how it evolves across the two versions, this is the biggest difference I could find that could explain the problem we're seeing practically.In practice, to initialise the arm position in the actual project we essentially do the same thing as in the script above, but with
nstep=5in themj_stepand do 50 such steps:In the image below demonstrating initial hand position, on the left is MuJoCo 2.3.7 and on the right is MuJoCo 3.0.0:

And videos visualising the difference:
MuJoCo 2.3.7

MuJoCo 3.0.0

Note that I tested with 3.0.0 mostly because I was trying to rule out the possibility that this was introduced in more recent versions. I have tested if any of the more recent versions fix this (3.1.2 and 3.1.3), but their behaviour is completely identical to 3.0.0. I have been using the Python bindings, tested on Python 3.9 and 3.11. Additionally, I have mostly been using MuJoCo 3 on my M1 Pro MacBook running macOS Sonoma 14.3.1, and MuJoCo 2.3.7 on a Debian 12 VM. I have also tested MuJoCo 3 on said Debian VM and also my x86 workstation running Arch Linux, but the behaviour is identical across all of them and it doesn't make a difference. So this doesn't seem to be a platform-specific issue.
I have tried looking for similar issues to no avail, and I have also looked through the change-log multiple times but I don't see any of the "breaking changes" or introduction of new features affecting this model. That said, admittedly I'm quite new to MuJoCo so maybe I'm missing something obvious.
Thank you for your time in advance, any pointers would be much appreciated.
The text was updated successfully, but these errors were encountered: