The aim of the project is to develop C# applications which connects to ROS via RosBridge. The early release works with rosbridge 1.0 the latest ones with rosbridge 2.0 (rosbridge_suite).
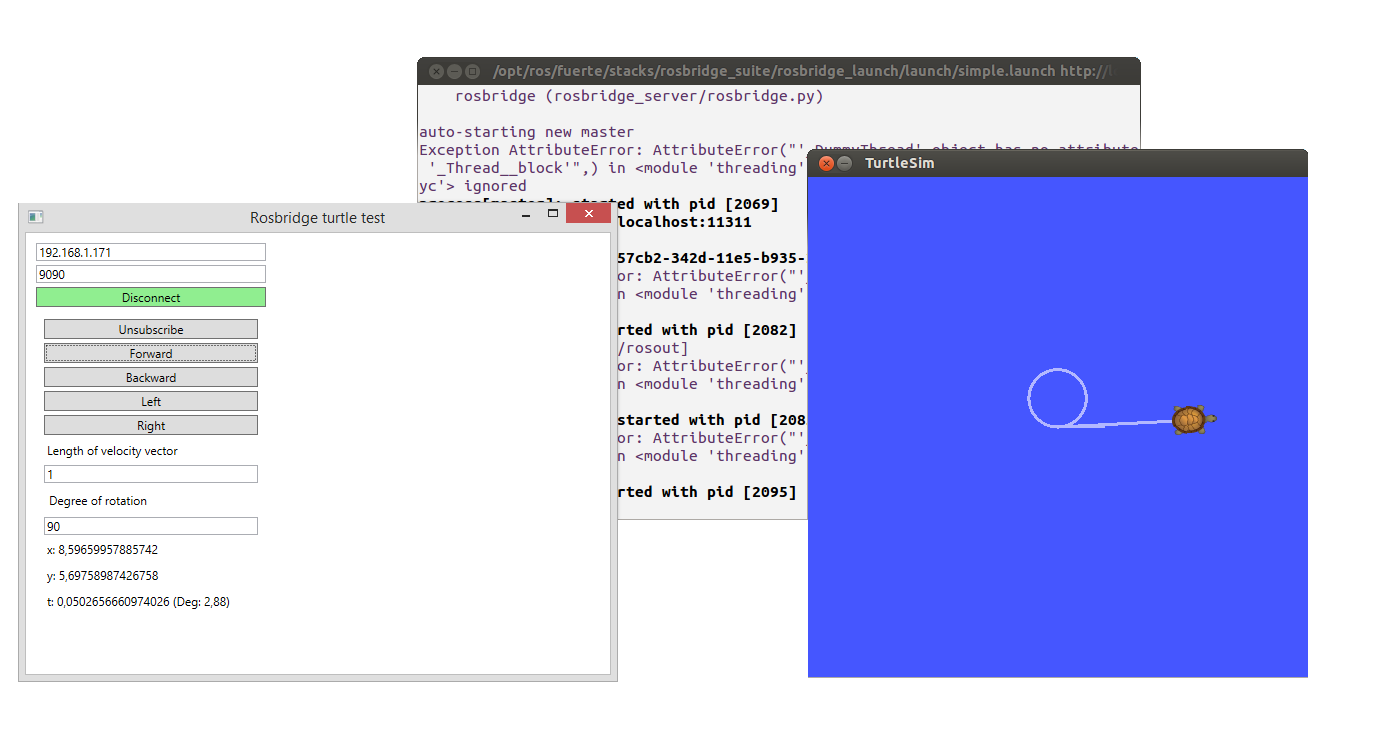
A demo of a C# application which connects to ROS via RosBridge. The communication is a JSON socket communication. Watch the video on YouTube.
In ROS you have to start:
roscore
rosrun rosbridge rosbridge.py
rosrun turtlesim turtlesim_node
In ROS you have to start:
roscore
roslaunch rosbridge_launch simple.launch or
roslaunch rosbridge_launch http.launch
rosrun turtlesim turtlesim_node