**Official Repository of Multimodal Data Fusion for Waypoint Prediction of Autonomous Vehicle **



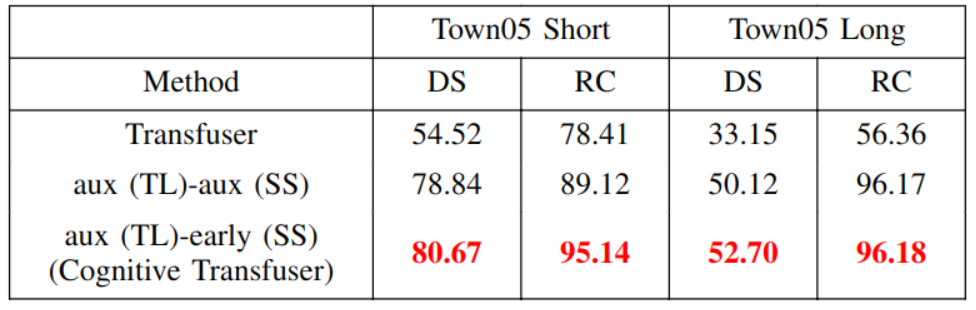
This is an official implementation of cognitive transfuser. Cognitive transfuser is an improved version of transfuser; utilizing auxiliary networks for traffic light classification and real-time semantic segmentation. The figure and table below show the overall structure and experiment results of cognitive transfuser respectively.

Get requirements
git clone https://github.com/Hwansoo-Choi/Cognitive-Transfuser/edit/Cognitive-Transfuser
conda create -n cognitive_transfuser python=3.7
conda activate cognitive_transfuser
pip3 install -r requirements.txtGet real-time semantic segmentation module
cd ..
git clone https://github.com/MichaelFan01/STDC-SegDownload pretrained model from STDC-Seg.
Locate the STDC1-Seg and STDC2-Seg directories at
STDC-Seg/checkpoints/Setup CARLA
chmod +x setup_carla.sh
./setup_carla.shGet dataset
Please refer to Dataset and Data Generation parts of Transfuser.
Get pretrained model
You can download pretrained model of cognitive transfuer from here.
Please locate the 'best_model.pth' file in Cognitive-Transfuser/cognitive_transfuser/log/ directory.
cd cognitive_transfuser
python train.pyThe trained model is saved in cognitive_transfuser/log/
Running CARLA server
Before running evaluation code, we must run CARLA server first.
SDL_VIDEODRIVER=offscreen SDL_HINT_CUDA_DEVICE=0 ./CarlaUE4.sh --world-port=2000 -openglRunning evaluation code
sh /leaderboard/scripts/cognitive_transfuser_eval.shThis implementation is based on CARLA Autopilot Leaderboard and Transfuser.
Semantic segmentation module and pretrained model are from STDC-Seg.