Github 地址:pytorch_train
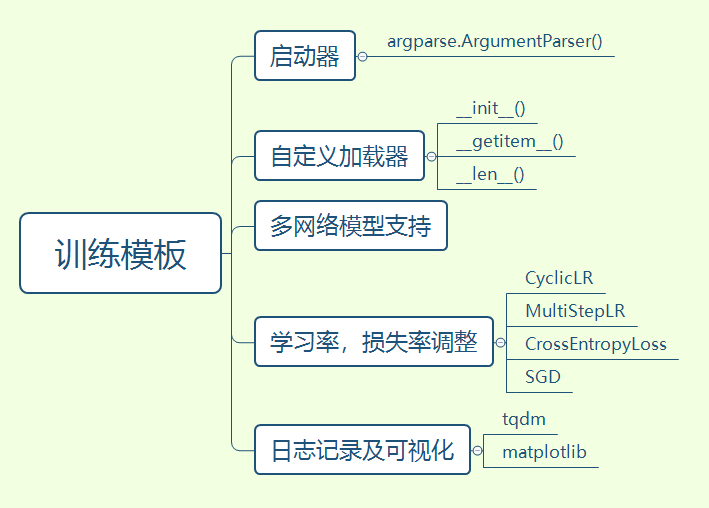
训练模型主要分为五个模块:启动器、自定义数据加载器、网络模型、学习率/损失率调整以及训练可视化。
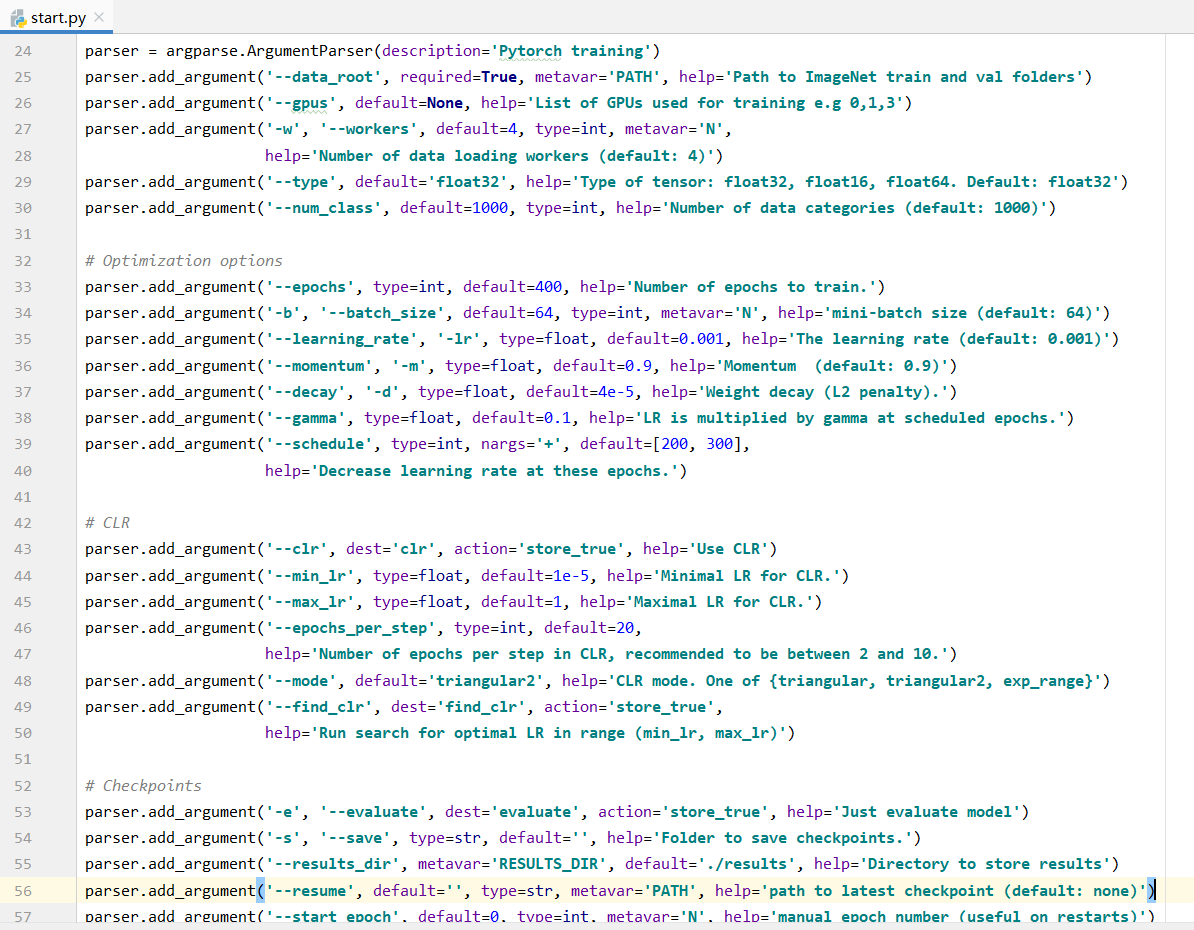
启动器是项目的入口,通过对启动器参数的设置,可以进行很多灵活的启动方式,下图为部分启动器参数设置。
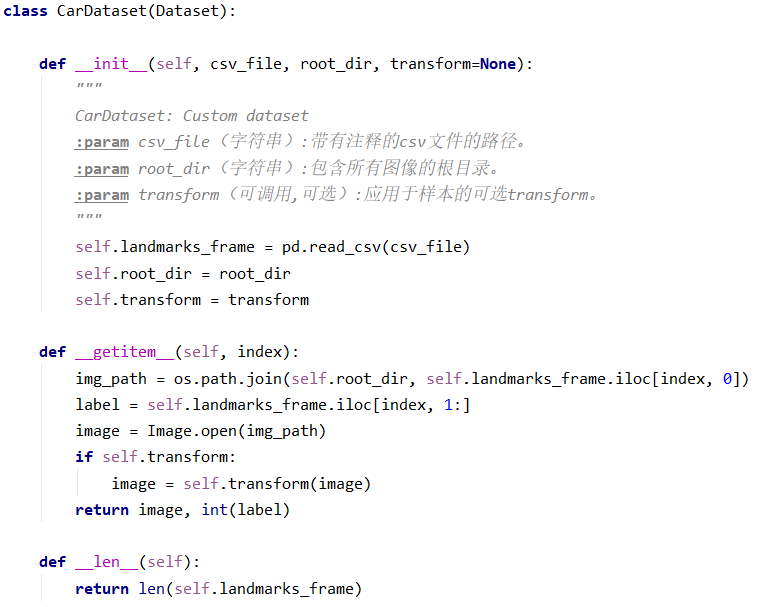
任何一个深度学习的模型训练都是离不开数据集的,根据多种多样的数据集,我们应该使用一个方式将数据集用一种通用的结构返回,方便网络模型的加载处理。
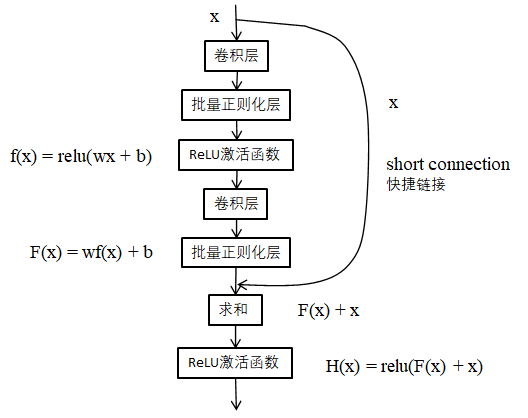
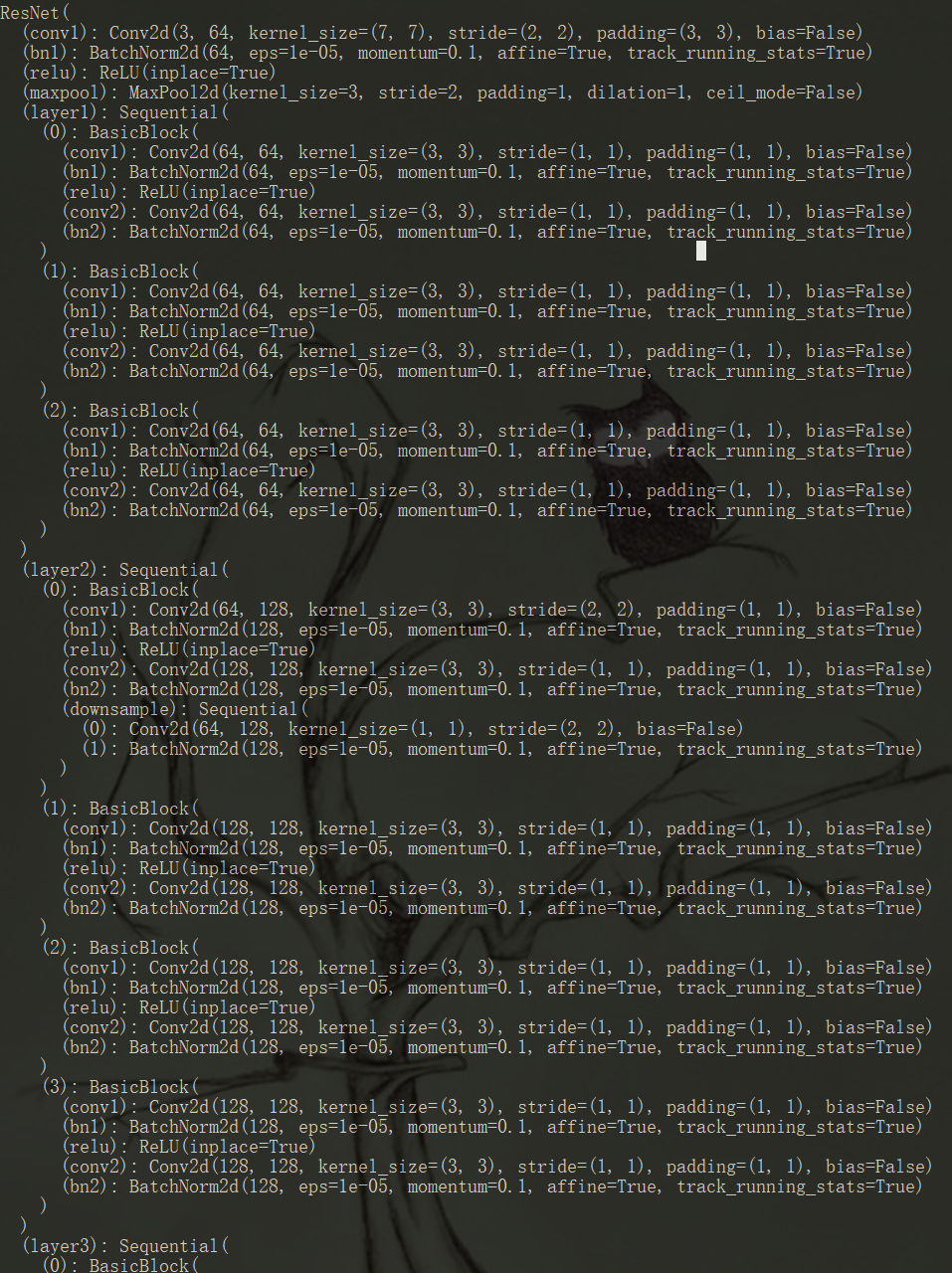
这里使用了残差网络Resnet-34,代码中还提供了Resnet-18、Resnet-50、Resnet-101以及Resnet-152。残差结构是通过一个快捷连接,极大的减少了参数数量,降低了内存使用。
以下为残差网络的基本结构和Resnet-34 部分网络结构图。
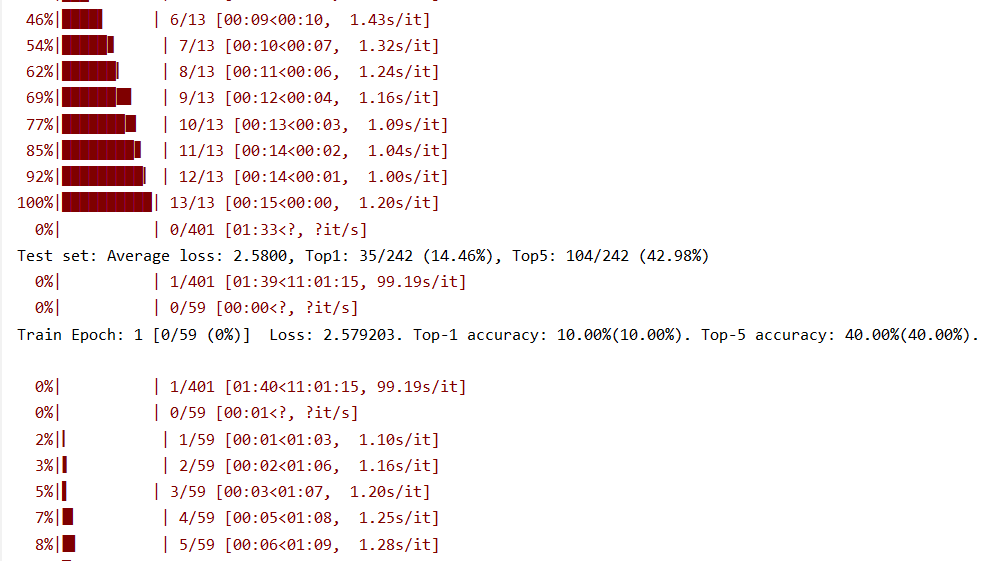
除了最开始看到的train-val图表、Top-、Top-5的error记录表以外,在训练过程中,使用进度条打印当前训练的进度、训练精度等信息。打印时机可以通过上边提到的 启动器 优雅地配置。
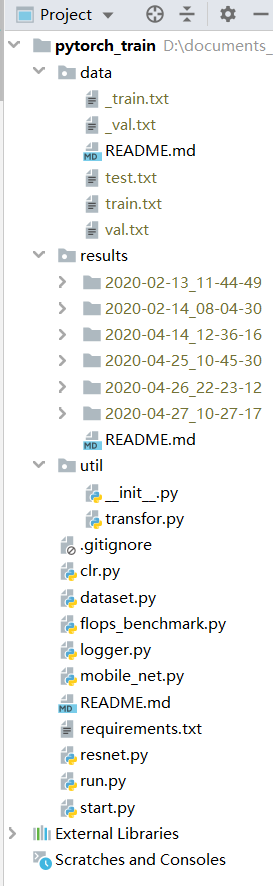
以下为最终的项目包架构。
pytorch_train
|-- data -- 存放读取训练、校验、测试数据路径的txt
| |-- train.txt
| |-- val.txt
| |-- test.txt
|-- result -- 存放最终生成训练结果的目录
|-- util -- 模型移植工具
|-- clr.py -- 学习率
|-- dataset.py -- 自定义数据集
|-- flops_benchmark.py -- 统计每秒浮点运算次数
|-- logger.py -- 日志可视化
|-- mobile_net.py -- 网络模型之一 mobile_net2
|-- resnet.py -- 网络模型之一 Resnet系列
|-- run.py -- 具体执行训练、测试方法
|-- start.py -- 启动器
Github 地址:pytorch_train/transfor
import os
import torch
import torchvision
model_pth = os.path.join("results", "2020-04-27_10-27-17", 'checkpoint.pth.tar')
# 将resnet34模型保存为Android可以调用的文件
mobile_pt = os.path.join("results", "2020-04-27_10-27-17", 'resnet34.pt')
num_class = 13
device = 'cpu' # 'cuda:0' # cpu
model = torchvision.models.resnet34(num_classes=num_class)
model = torch.nn.DataParallel(model, [0])
model.to(device=device)
checkpoint = torch.load(model_pth, map_location=device)
model.load_state_dict(checkpoint['state_dict'])
model.eval() # 模型设为评估模式
# 1张3通道224*224的图片
input_tensor = torch.rand(1, 3, 224, 224) # 设定输入数据格式
traced_script_module = torch.jit.trace(model.module, input_tensor) # 模型转化
traced_script_module.save(mobile_pt) # 保存文件启动前需要确保你已经有了本项目使用的数据集 CompCars
python start.py --data_root "./data" --gpus 0,1,2 -w 2 -b 120 --num_class 13- --data_root 数据集路径位置
- --gups 使用gpu训练的块数
- -w 为gpu加载自定义数据集的工作线程
- -b 用来gpu训练的 batch size是多少
- --num_class 分类类别数量
python start.py --data_root "./data" --gpus 0,1,2 -w 2 -b 120 --num_class 13 --resume "results/2020-04-14_12-36-16"- --data_root 数据集路径位置
- --gups 使用gpu训练的块数
- -w 为gpu加载自定义数据集的工作线程
- -b 用来gpu训练的 batch size是多少
- --num_class 分类类别数量
- --resume 上次训练结果文件夹,可继续上次的训练
将训练好的模型转换为Android可以执行的模型
python transfor.py- 找寻自己的数据集
- 需要修改启动脚本中 --num_class,模型类别
目前项目中具备很多备注记录,稍加review代码就可以理解,如有不清楚,可以私信询问。


有偿提供全套环境搭建+数据集下载+模型迁移+论文范本+技术指导