Problems when the same program runs differently time. #50
Comments
|
Hi, I cannot spot anything particularly suspicious in that code snippet. One suggestion would be to check the sizes of Thanks for your interest in cilantro! :D |
|
Thank you for your reply,
and then i transform use
The reason i do this is because i can not push_back a cilantro::RigidTransform3f variable like
It make my program crash directly
|
|
Hi, The problem is most likely this one: If you need a vector container, you can try If you need an I hope one of these works! :) Using newer versions of Eigen with C++17 is supposed to eliminate the need to worry about allocators in such scenarios. |
|
Hi,
Finally I want to ask two questions:
It not affect my program , But there is no code hint ,Is there a problem with my program environment? There is my CMakeList.txt: |

|
Hi, Glad it worked :) You don't need to worry about the allocator when storing The CMake message about Eigen while configuring is because of the Eigen package in Ubuntu 16.04 (it's fixed in 18.04), but it's nothing to worry about. Regarding the Unfortunately, I haven't used QtCreator in a really long time. It looks like it is able to work with CMake projects, so it might simply be a matter of the IDE reading the right build/configuration dir. Cheers! |
|
Thank you for answering me, |
|
No problem at all, happy I could help! Thank you, you too! :D |
|
hi, |
Hi , this is a awesome project, I am studying it recently. But recently there has been a problem that bothers me . I use Qt creator programming , and I created a window to display multiple point clouds together, Sometimes it runs correctly, sometimes it just quits the program after Visualizer quick popup.
just like a visualizer window quick popup which no point cloud data and exit .
Qt only show me : The program has unexpectedly finished.
Terminal show like everything goes right : Press to close this window...
There is show window that i want
When not running successfully, it just like
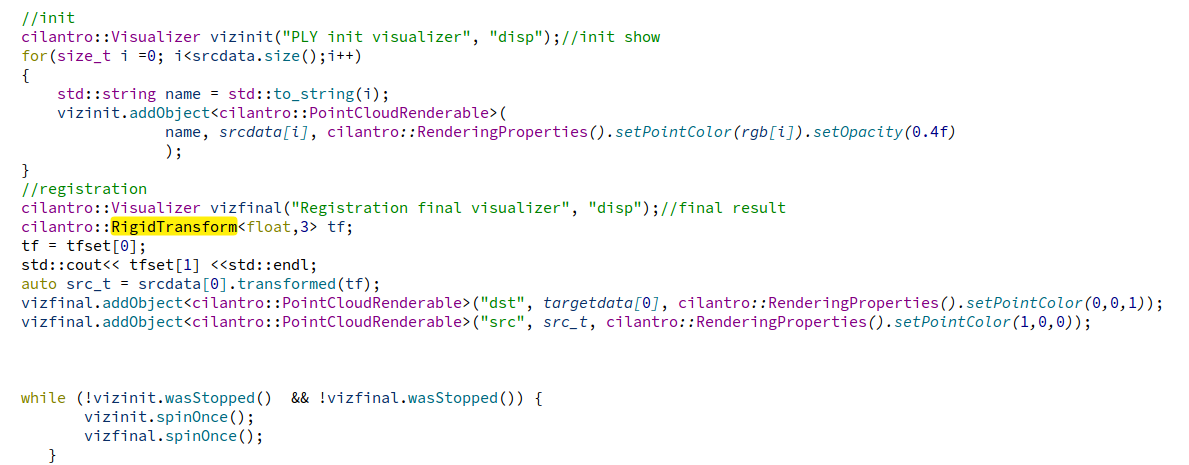
This is the problematic code segment
My running environment is ubuntu16 . Can you give me some suggestions? This is very uncomfortable to debug the code
The text was updated successfully, but these errors were encountered: