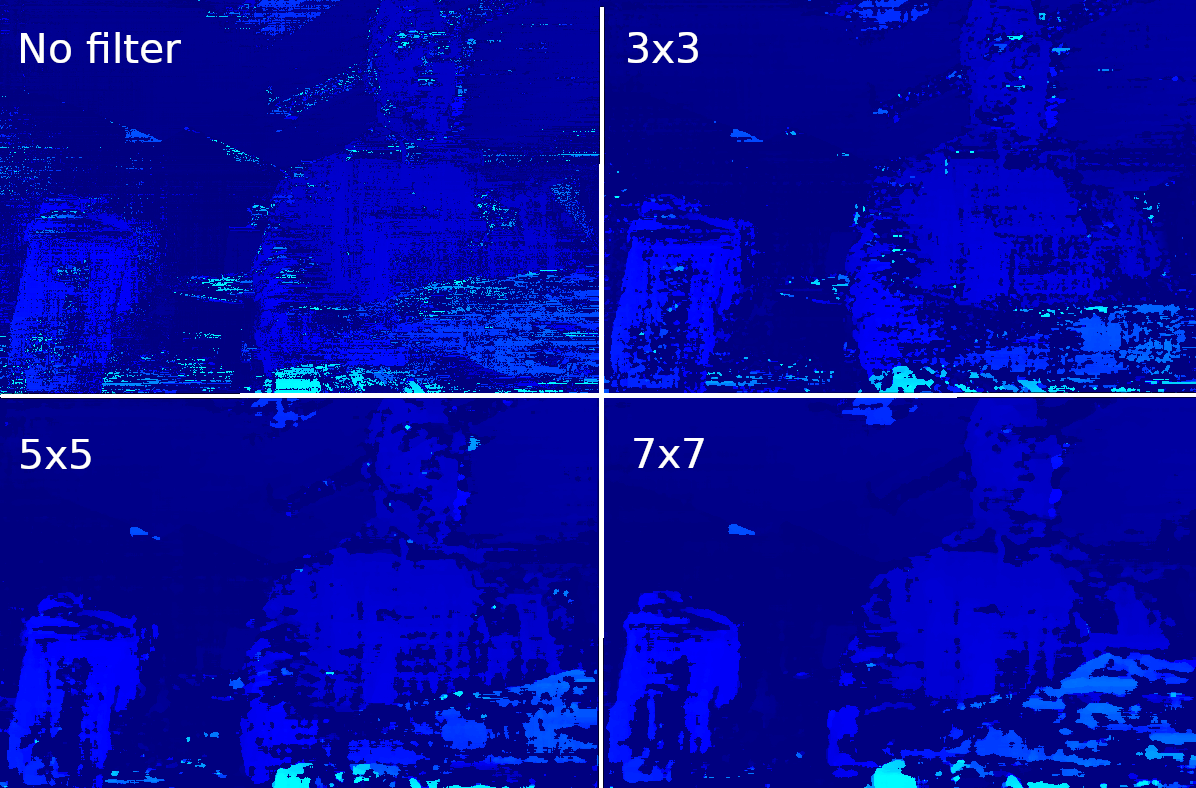
This example shows how to set the SGBM (semi-global-matching) disparity-depth node, connects over XLink to transfer the results to the host real-time, and displays the depth map in OpenCV. Note that disparity is used in this case, as it colorizes in a more intuitive way. Below is also a preview of using different median filters side-by-side on a depth image. There are 3 depth modes which you can select inside the code:
- `lr_check`: used for better occlusion handling. For more information click here
- `extended_disparity`: suitable for short range objects. For more information click here
- `subpixel`: suitable for long range. For more information click here
Similar samples:
RGB PreviewMono PreviewStereo Depth Video
Filtering depth using median filter