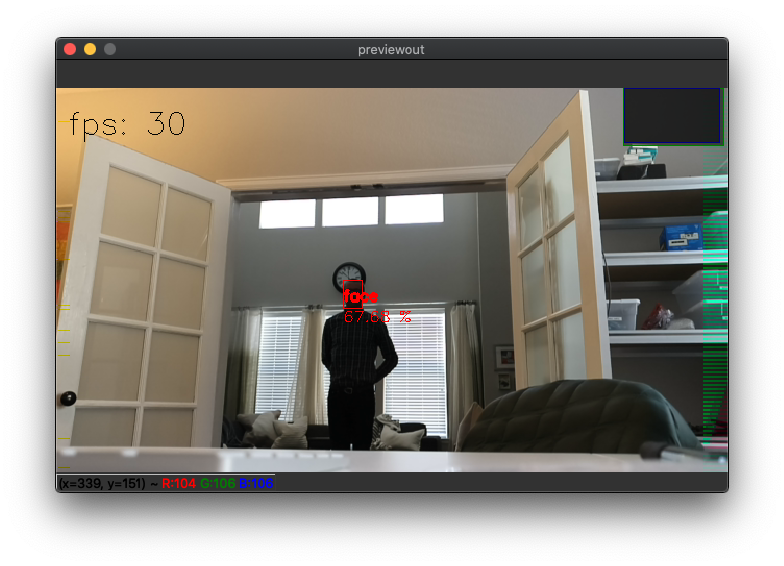
Strange artifacts showing on right side of preview image #72
Comments
|
Hi @ConnorChristie , Yes we have seen that too on some models like at the bottom here: There’s some alias occurring and we’re working to figure out why. If you notice those pixels are a strange remapping from the left side of the image where red and green come over but not blue. Sorry we should have had this up as a known issue. |
|
For documentation purposes another model that does this is
|
|
Hi @ConnorChristie , Just wanted to update that this is on our shortlist, but we're cranking through some necessary improvements first. #74 #77 #76 #66 #62 in addition to updating our tensor-output processing so that it can be dynamic for support of other tensor formats. And we have h.264 1080p video output support and 12MP still image support output to go to PR tomorrow. Thoughts? Thanks, |
|
Hi @ConnorChristie , So the fix for this is in this PR (with some other fixes and related functionalities): |
|
|
|
Hi @ConnorChristie Edit: Ah, great! Thanks for the update! |
|
@alex-luxonis Yup, figured it out. Thought I was building latest but it turns out I was not. Everything works as expected now, thanks! |
|
This has been fixed by #85 |
I just converted the

vehicle-detection-adas-002to the blob format and tried running it through a similar pipeline as the second tutorial. It partially works and it does manage to recognize vehicles quite accurately but seems to show some weird green and pink bars on the right hand side of the preview image:I did re-compile the depthai-api module to run on my board which is a 64 bit version of linux:
Linux NanoPi-Fire3 4.4.172-s5p6818 #1 SMP PREEMPT Mon Nov 11 11:24:09 CST 2019 aarch64 aarch64 aarch64 GNU/LinuxI am also using python 3.7 and opencv 3.4.9 if that makes any difference?
Here is the output from depthai after running the python script:
The text was updated successfully, but these errors were encountered: