OV9782 camera: after being ISP scaled it's not divisible by 2 anymore #961
Comments
|
Hi @ostepan2006 , So it tries to use 4K resolution, fails as it's OV9782, then downscales the (default) 800P resolution by 1/3 => |
|
@ostepan2006 please try switching to |
Thanks for your reply. After doing that i got another error. |

Thanks for your reply. Should I delete |
|
Hi @ostepan2006 best to try the |
I had swithed to I had used this board configuration (see screenshot): |


|
@ostepan2006 you have to specify the cameras you have connected. I suggest you modify this file to fit your needs. |
I have made my board configuration from your documentation (see screenshot below) |

|
@ostepan2006 I see the link I wanted to post in the previous comment didn't display correctly. Please use this file for reference and just change the extrinsics and fovs of the cameras. {
"board_config":
{
"name": "OAK-D-PRO",
"revision": "R3M1E3",
"cameras":{
"CAM_A": {
"name": "rgb",
"hfov": 68.7938,
"type": "color"
},
"CAM_B": {
"name": "left",
"hfov": 71.86,
"type": "mono",
"extrinsics": {
"to_cam": "CAM_C",
"specTranslation": {
"x": -7.5,
"y": 0,
"z": 0
},
"rotation":{
"r": 0,
"p": 0,
"y": 0
}
}
},
"CAM_C": {
"name": "right",
"hfov": 71.86,
"type": "mono",
"extrinsics": {
"to_cam": "CAM_A",
"specTranslation": {
"x": 3.75,
"y": 0,
"z": 0
},
"rotation":{
"r": 0,
"p": 0,
"y": 0
}
}
}
},
"stereo_config":{
"left_cam": "CAM_B",
"right_cam": "CAM_C"
}
}
} |
Am i right in thinking that extrinsics should be filled before calibration? I thought that extrinsics will be calculated during calibration. |
|
These are so called spec extrinsics and are sometimes more accurate than the calculated ones. For example the |
As I understand spec extrinsics is not mundatory to do calibration of OAK-FFC-3P device. Right? Could I live rotation fields empty (equal zero) in the board_config file? If not do you have more detailed explanation of the procedure of formation of the board_config file? In particalar it is iteresting how can I calculate all extrinsics. Thanks |
|
You can set all rotation fields to zero. I'm not sure what happens if you leave them empty. The camera without the I assume your cameras are placed in the following way: and the distance between left and right camera is 5.2 cm and the distance between center and left camera is 2.6 cm. In that case, the board config file should look something like that: |
|
Hi @njezersek . I have created What is a problem I had while calibration procedure? Please give me a help. Thanks board_config.json: |
|
@ostepan2006 your json needs these 2 fields as well inside |
|
Thanks. I will fix my config file and redo calibration. |
|
@Erol444 The previous error have not arised while calibration. But I got new error: I think that there is a mismatch between cameras placement and info in configuration file. Do you have tutorial about: |
|
@ostepan2006 It could be the camera placement / configuration file. What's your current setup? Could you maybe take a photo of all 3 cameras, and draw the distances between them? |
|
Thanks for the quick reply. The image of my installation is below. As you can see a distance between neighbor cameras is about 26 mm. All cameras have rotated on 180 degrees. The color camera is in between grayscale ones. Maybe I have mismatch between the grayscale cameras in the config file? |

|
@ostepan2006 based on the error it does look like the config file (json) is incorrect. |
Hello. I had been trying to calibrate my OAK-FFC-3P device. And i got an error (see print screen).
If i replace OAK-FFC-3P by OAK-D and run camera_preview.py I got another error : File "camera_preview.py", line 36, in
device.startPipeline(pipeline)
RuntimeError: Camera(4) - 'video' width or height (-1, -1) must be bigger than (32, 32).
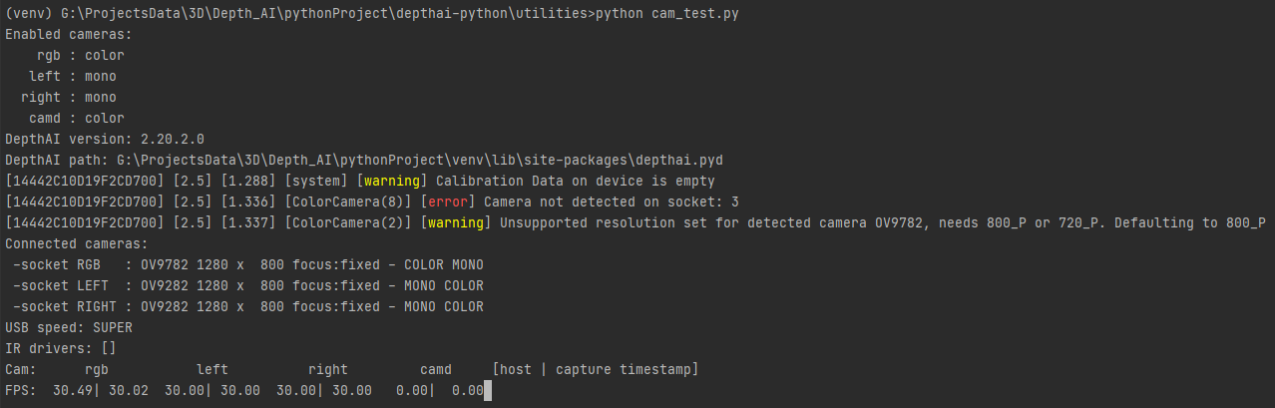
I have tried cam_test.py. I got this output
Luxonis-Erik posted this message:
https://discord.com/channels/790680891252932659/924798475030392922/1082672913032949921
Please help me calibrate my OAK-FFC-3P device
The text was updated successfully, but these errors were encountered: