Dynamic class to manage Shift Register 74HC595 in Raspberry Pi using Python
* Raspberry Pi
* Python 2.6+ and Python development tools
* RPi.GPIO (latest version recommended)
Install RPi.GPIO library and Python development tools:
sudo apt-get update && sudo apt-get -y install python-rpi.gpio python-devGet this library:
Using pip:
pip install git+https://github.com/marsminds/shiftr_74HC595.git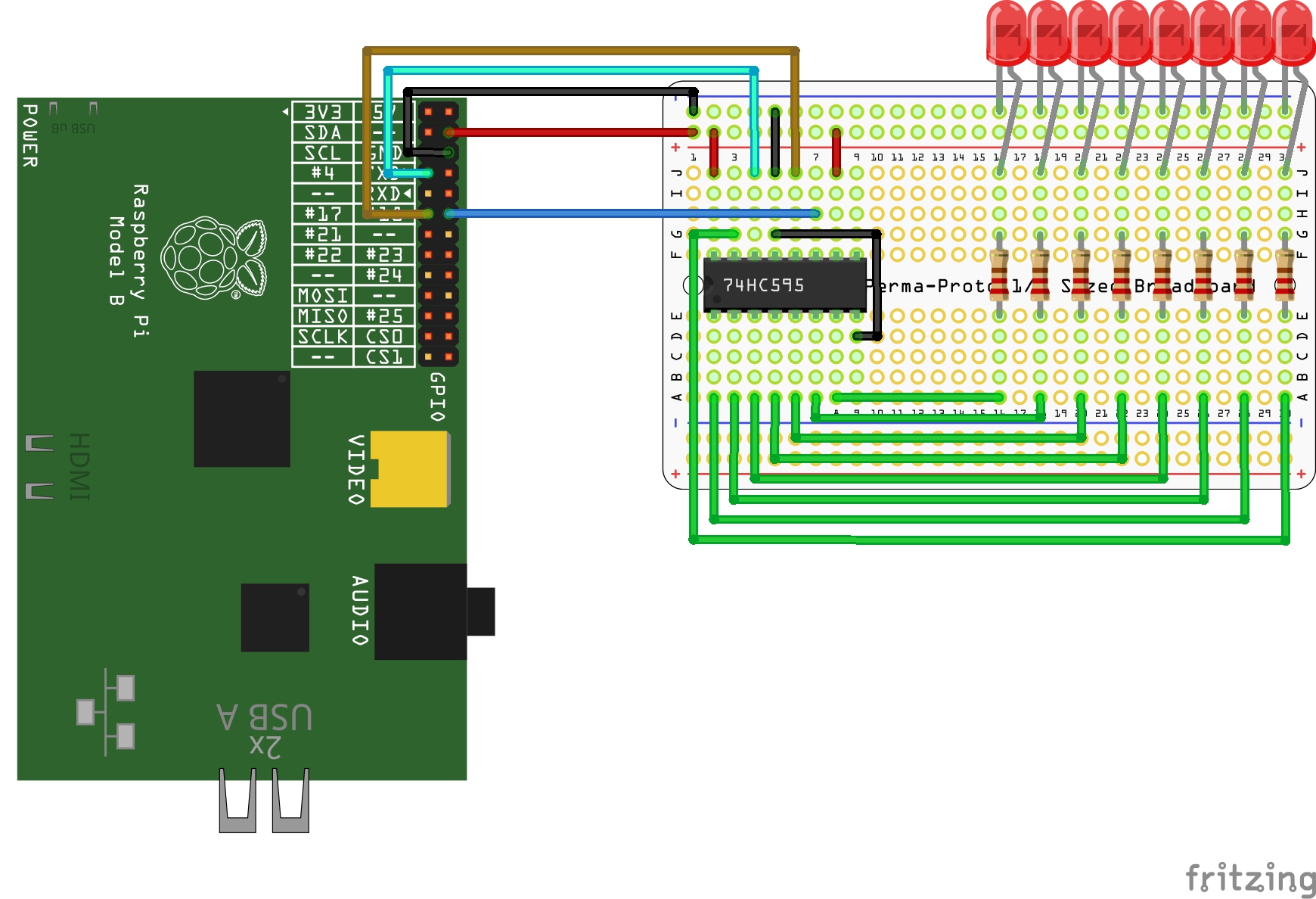
import RPi.GPIO as GPIO
from shiftr_74HC595.shiftr_74HC595 import ShiftRegister
from time import sleep
GPIO.setmode(GPIO.BOARD)
data_pin = 7 #pin 14 on the 75HC595
latch_pin = 11 #pin 12 on the 75HC595
clock_pin = 12 #pin 11 on the 75HC595
shift_register = ShiftRegister(data_pin, latch_pin, clock_pin)
try:
while 1:
# Set all outputs
shift_register.setOutputs([GPIO.HIGH, GPIO.LOW, GPIO.LOW, GPIO.LOW, GPIO.HIGH, GPIO.LOW, GPIO.LOW, GPIO.HIGH])
# Display
shift_register.latch()
sleep(1)
# Set some output individually
shift_register.setOutput(0, GPIO.LOW)
shift_register.setOutput(5, GPIO.HIGH)
shift_register.latch()
sleep(1)
except KeyboardInterrupt:
print "Ctrl-C - quit"
GPIO.cleanup()Instanciate and configure pin of a shift register.
ShiftRegister(data_pin, latch_pin, clock_pin)data_pin => pin 14 on the 74HC595
latch_pin => pin 12 on the 74HC595
clock_pin => pin 11 on the 74HC595
Example:
# Instanciate a new shiftregister wired on pins 14, 15, 18 of the Raspberry
shift_register = ShiftRegister(14, 15, 18)Update an individual output of the shift register.
shift_register.setOutput(output_number, value)output_number => Value from 0 to 7 pointing to the output pin on the 74HC595
0 => Q0 pin 15 on the 74HC595
1 => Q1 pin 1 on the 74HC595
2 => Q2 pin 2 on the 74HC595
3 => Q3 pin 3 on the 74HC595
4 => Q4 pin 4 on the 74HC595
5 => Q5 pin 5 on the 74HC595
6 => Q6 pin 6 on the 74HC595
7 => Q7 pin 7 on the 74HC595
value => a state to pass to the pin, could be HIGH or LOW
Example:
# Set Q3 to high in register
shift_register.setOutput(3, GPIO.HIGH)
shift_register.latch()Update all outputs of the shift register.
shift_register.setOutputs(outputs)outputs => an array of height GPIO.LOW or GPIO.HIGH
Example:
# Draw a zebra
shift_register.setOutputs([GPIO.LOW, GPIO.HIGH, GPIO.LOW, GPIO.HIGH, GPIO.LOW, GPIO.HIGH, GPIO.LOW, GPIO.HIGH])
shift_register.latch()Clock the shift register so the updated values are sent to shift register outputs.
shift_register.latch()Example:
# Perform some updates...
shift_register.setOutput(3, GPIO.HIGH)
# Display result
shift_register.latch()