This project was never completed due to the loss of access to native GPIB equipments. As a result a number of planned functionnalities are not implement. The initial code for SRQ support on Arduino side is known to be buggy and could lead to a locked state. I would recommend to first inspect - or remove - these functions in case of trouble with an unresponsive board.
Contributions are still accepted in the form of pull requests to be reviewed.
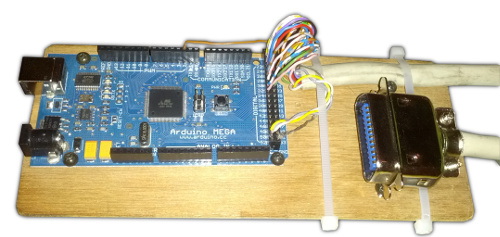
Agipibi is a cheap GPIB interface based on the Arduino Mega board or higher models. It connects scientific instruments using IEEE 488 buses to a computer, or the micro-controller itself if you integrate it in your own code. This project goal is to provide the best open source implementation of a GPIB controller on prototyping platforms.
- system controller role
- act as talker or listener in full address space
- multiple concurrent listeners
- switch instruments to remote mode
- (un)lock front panels
- fast reading (Arduino is buffering chunks of data)
- group trigger
- timeout handling when reading bus
Work-in-progress:
- SRQ request interruption and serial polling
- more examples for Tektronix scopes
- bridge to LabVIEW with a Python script (TCP server)
This interface was designed for Arduino Mega 1280, to use other boards you'll have to edit the pin mapping at the top of arduino_mega.ino sketch. Be careful about the SRQ line that should have an interrupt capable output.
-
Connect your GPIB bus/instrument to the board with no additional component. You'll find examples in the documentation directory.
-
Build and upload the 'arduino_mega.ino' sketch in Arduino IDE.
-
Use the Python module 'agipibi.py' to begin tests. Examples are provided. It's best to start in a scenario that doesn't require a controller or bi-directional communication. At first I put my scope in Talker mode and had it transmit a waveform using menus only. The following code would be enough in this case.
from agipibi import Agipibi
dev = Agipibi()
if dev.interface_ping():
dev.gpib_init(controller=False)
waveform = dev.gpib_read() # press the 'Transmit' scope button
print 'Received %d bytes' % len(waveform)
else:
print 'Arduino is not responding'- Thibault VINCENT root@devcat.org
- Mathias Helsen helsen.mathias@gmail.com
Agipibi was inspired by similar projects:
-
A japanese blogger article http://bananawani-mc.blogspot.fr/2010/09/arduinogpib.html
-
GPL code from Dennis Dingeldein http://www.spurtikus.de/basteln/gpib_en.html
-
USB to GPIB Controller by LPVO http://lpvo.fe.uni-lj.si/en/research/electronics/
-
GPIB USB Adapter by Steven Casagrande https://github.com/Galvant/gpibusb-firmware