question about convert quaternion to yaw #523
Comments
|
Please check and specifically |
|
thanks for your quick reply! but I can not figure out what it means |
|
The first part |
|
Thank you, sir. sorry for my late reply, I will try it. |
|
Hello, |
|
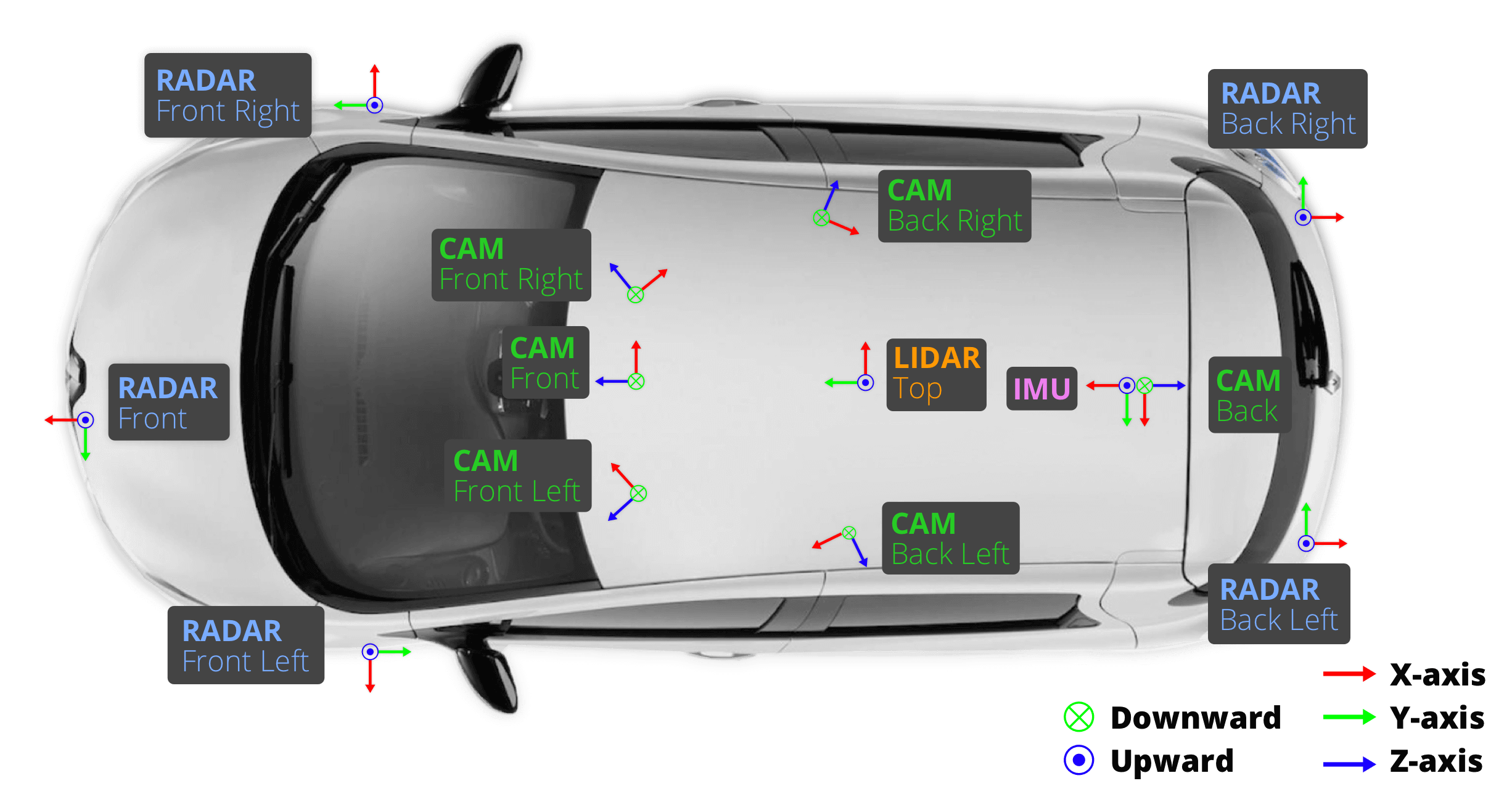
Unfortunately I don't remember the conventions of KITTI and don't have it installed to run some checks. You can see our conventions at https://www.nuscenes.org/public/images/data.png . |
{kind=link}
|
There is another question that about quaternion condused me. kitti_to_nu_lidar = Quaternion(axis=(0, 0, 1), angle=np.pi / 2), as I known that in kitti, its lidar coordinate system is : x front, y left, z up, and in nuscenes, its lidar coordinate system is : x right, y front, z up, kitti_to_nu_lidar is rotate pi/2 around z axis, according to right-handed, x front will turn to x left, does the z axis point down? @holger-nutonomy |
|
You can see whether z points up or down in https://www.nuscenes.org/public/images/data.png. |
|
from wiki, right hand rule is For right-handed coordinates the right thumb points along the Z axis in the positive direction and the curl of the fingers represents a motion from the first or X axis to the second or Y axis. When viewed from the top or Z axis the system is counter-clockwise., what I know about right hand rule is also this, and z is up in kitti lidar and nuscenes lidar, follow the right hand rule, x front z up in kitti lidar will turn to x left which is just opposite from x right in nuscenes, it confused me. If there are some errors, please tell me. Thanks! |
Hi, sir. I have got 3D bbox in nuscenes lidar coords and transform it to kitti lidar coords by kitti_to_nu_lidar_inv, and get box_lidar_kitti:

and I want to use nuscenes data in kitti lidar coordinate system to train some 3D detection model which don't support nuscenes dataset, but I have no idea about converting quaternion to yaw; In box_to_string, it converts quaternion to yaw in kitti image frame, and how to convert quaternion to yaw in kitti lidar frame? Can I use quaternion_yaw? Appreciate for your reply!
The text was updated successfully, but these errors were encountered: