Collision WorldPose does not get updated. #1124
Comments
|
Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters). Does the model have multiple links? I'm asking because I see different So I'm wondering if SetWorldPoseDefault is broken, in which case non-canonical links should have a static world pose as well. |
|
Original comment by Andrei Haidu (Bitbucket: ahaidu). I first noticed it with a model with multiple links, and then tested it as well on a model with one link one collision. Both had the same issue. |
|
Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters). I can confirm that Maybe @nkoenig what do you recommend? |
|
Original comment by Nate Koenig (Bitbucket: Nathan Koenig). I think the |
|
Original comment by Nate Koenig (Bitbucket: Nathan Koenig). |
|
Original comment by Jonathan Bohren (Bitbucket: jbohren). I just ran into this, too. |
|
Original comment by Nate Koenig (Bitbucket: Nathan Koenig).
Resolved in pull request #1049 |
|
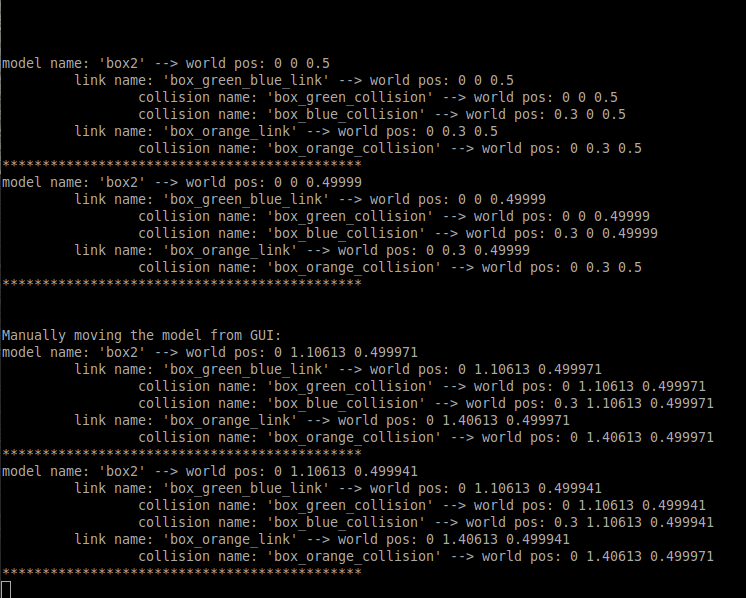
Original comment by Andrei Haidu (Bitbucket: ahaidu). The issue still appears for models with multiple links. I have installed gazebo from default (currently version 4.0.0). I am using for testing a model with 2 links. First link has 2 collision, second link 1 collision:
The second collision doesn't get updated. Only when manually moving it with the mouse, and then only for one iteration. Testing code: Screenshot with the terminal output: |
|
Original comment by Andrei Haidu (Bitbucket: ahaidu).
|
|
Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters). Can you suggest a patch for our regression test? That will make it easier to reproduce. Thanks for the report. |
|
Original comment by John Hsu (Bitbucket: hsu, GitHub: hsu). and reuse issue_1124 branch if possible Your test world will go into this world folder |
|
Original comment by Nate Koenig (Bitbucket: Nathan Koenig).
|
|
Original comment by Nate Koenig (Bitbucket: Nathan Koenig).
|
Original report (archived issue) by Andrei Haidu (Bitbucket: ahaidu).
During simulation Collision::GetWolrdPose does not get updated.
Here is a testing piece of code:
During the simulation while the object is moving the link poses change, and the collisions maintain their original position.
Testing works with a simple box model.
The text was updated successfully, but these errors were encountered: