# Pymodbus REPL Server
Pymodbus REPL server helps to quickly start an [asynchronous server](../../../examples/common/asyncio_server.py) from the command line.
Support both Modbus TCP and Modbus RTU server.
Some features offered are
---1. Runs a [reactive server](../../server/reactive/main.py) in REPL and NON REPL mode. 2. Exposes REST API's to manipulate the behaviour of the server in non REPL mode. 3. Ability to manipulate the out-going response dynamically (either via REPL console or via REST API request). 4. Ability to delay the out-going response dynamically (either via REPL console or via REST API request). 5. Auto revert to normal response after pre-defined number of manipulated responses.
## Installation Install pymodbus with the required dependencies
pip install pymodbus[repl]
## Usage
Invoke REPL server with pymodbus.server run command.
`shell ✗ pymodbus.server --help Usage: pymodbus.server [OPTIONS] COMMAND [ARGS]... Reactive Modbus server ╭─ Options ──────────────────────────────────────────────────────────────────────────────────────────────────────────────────╮ │ --host TEXT Host address [default: localhost] │ │ --web-port INTEGER Web app port [default: 8080] │ │ -b Support broadcast messages │ │ --repl --no-repl Enable/Disable repl for server [default: repl] │ │ --verbose --no-verbose Run with debug logs enabled for pymodbus [default: no-verbose] │ │ --install-completion Install completion for the current shell. │ │ --show-completion Show completion for the current shell, to copy it or customize the │ │ installation. │ │ --help Show this message and exit. │ ╰────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────╯ ╭─ Commands ─────────────────────────────────────────────────────────────────────────────────────────────────────────────────╮ │ run Run Reactive Modbus server. │ ╰────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────╯`
`shell ✗ pymodbus.server run --help Usage: pymodbus.server run [OPTIONS] Run Reactive Modbus server. Exposing REST endpoint for response manipulation. ╭─ Options ──────────────────────────────────────────────────────────────────────────────────────────────────────────────────╮ │ --modbus-server -s TEXT Modbus Server [default: ModbusServerTypes.tcp] │ │ --framer -f TEXT Modbus framer to use [default: ModbusFramerTypes.socket] │ │ --modbus-port -p INTEGER Modbus port [default: 5020] │ │ --slave-id -u INTEGER Supported Modbus slave id's [default: None] │ │ --modbus-config-path PATH Path to additional modbus server config [default: None] │ │ --random -r INTEGER Randomize every `r` reads. 0=never, 1=always,2=every-second-read, and so on. Applicable │ │ IR and DI. │ │ [default: 0] │ │ --help Show this message and exit. │ ╰────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────╯`
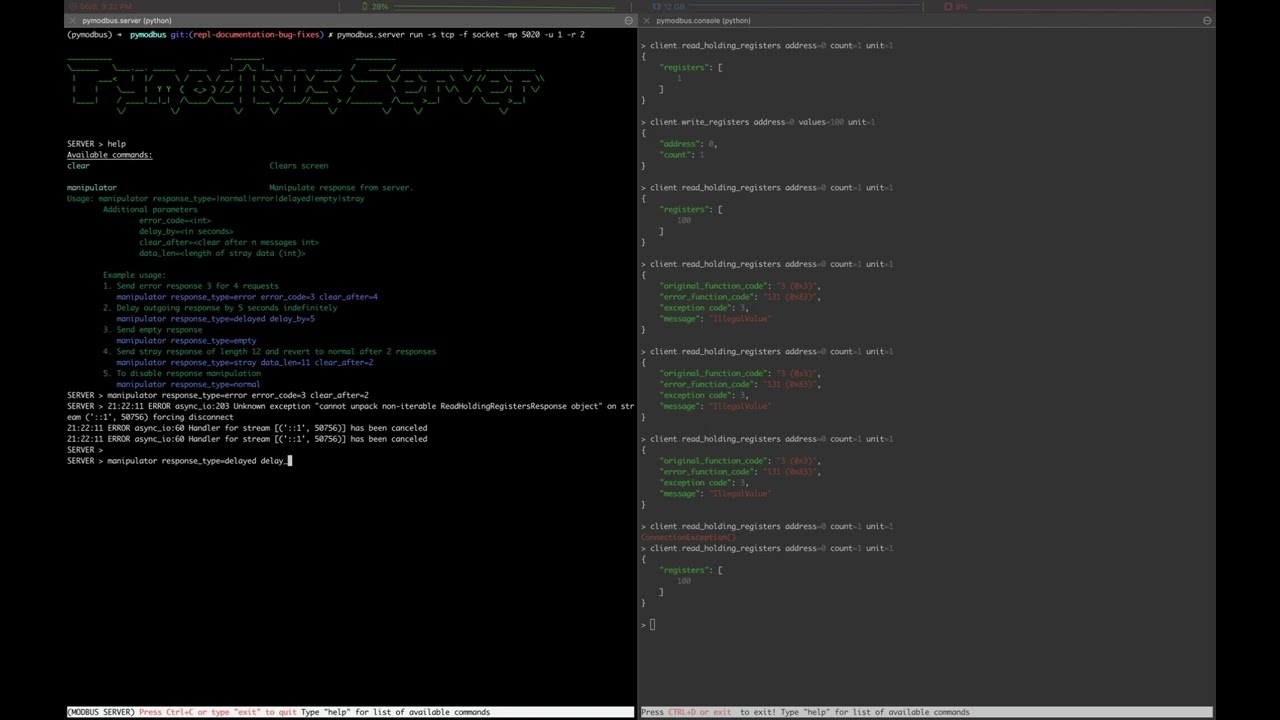
### Pymodbus Server REPL mode
The REPL server comes with auto-completion and can be installed for the supported shell with pymodbus.server --install-completion <shell>. Don't forget to restart the terminal for the auto-completion to kick-in. Use TAB key to show auto-completion.
Example usage.
`shell ✗ pymodbus.server run --modbus-server tcp --framer socket --slave-id 1 --slave-id 4 --random 2 \______ \___.__. _____ ____ __| _/\_ |__ __ __ ______ / _____/ ______________ __ ___________ | ___< | |/ \ / _ \ / __ | | __ \| | \/ ___/ \_____ \_/ __ \_ __ \ \/ // __ \_ __ \\ | | \___ | Y Y ( <_> ) /_/ | | \_\ \ | /\___ \ / \ ___/| | \/\ /\ ___/| | \/ |____| / ____|__|_| /\____/\____ | |___ /____//____ > /_______ /\___ >__| \_/ \___ >__| \/ \/ \/ \/ \/ \/ \/ \/ SERVER > help Available commands: clear Clears screen manipulator Manipulate response from server. Usage: manipulator response_type=|normal|error|delayed|empty|stray Additional parameters error_code=<int> delay_by=<in seconds> clear_after=<clear after n messages int> data_len=<length of stray data (int)> Example usage: 1. Send error response 3 for 4 requests manipulator response_type=error error_code=3 clear_after=4 2. Delay outgoing response by 5 seconds indefinitely manipulator response_type=delayed delay_by=5 3. Send empty response manipulator response_type=empty 4. Send stray response of length 12 and revert to normal after 2 responses manipulator response_type=stray data_len=11 clear_after=2 5. To disable response manipulation manipulator response_type=normal`
[](https://youtu.be/OutaVz0JkWg)
{kind=link}
### Pymodbus Server Non REPL Mode To run the Reactive server in the non-repl mode use --no-repl flag while starting the server. The server responses can still be manipulated with REST API calls.
` pymodbus.server --no-repl --verbose run --modbus-server tcp --framer socket --slave-id 1 --slave-id 4 --random 2 --modbus-port 5020 2022-10-27 13:32:56,062 MainThread INFO main :246 Modbus server started Reactive Modbus Server started. ======== Running on http://localhost:8080 ======== =========================================================================== Example Usage: curl -X POST http://localhost:8080 -d "{"response_type": "error", "error_code": 4}" ===========================================================================`
#### REST API
The server response can be manipulated by doing a POST request on the web-server running http://<host>:<port>. The values for host and port can be modified with --host and --web-port params while starting the server. The default values are localhost and 8080
` pymodbus.server --host <host-ip> --web-port <new-port> run .....`
The payload for the POST requests is
` { "response_type": "normal", # normal, error, delayed, empty, stray "delay_by": <int>, "data_len": <int>, "error_code": <int>, "clear_after": <int>, # request count }`
- response_type : Response expected from the server.
- normal : Normal response, no errors
- `error`: Return error responses , requires additional error_code field for the modbus error code to be returned.
- `error_code`: Error code to return, possible values are
` 0x01 # IllegalFunction 0x02 # IllegalAddress 0x03 # IllegalValue 0x04 # SlaveFailure 0x05 # Acknowledge 0x06 # SlaveBusy 0x08 # MemoryParityError 0x0A # GatewayPathUnavailable 0x0B # GatewayNoResponse`
- `delayed`: Responses are delayed by the time specified with delay_by field.
- `delay_by`: Delay the response by <n> seconds (float).
- `empty`: Returns an empty response or no response
- `stray`: Returns stray/junk response with length specified with data_len field.
- `data_len`: Length of the stray_data (int)
- `clear_after`: Clears the error responses after <n> requests (int)
EXAMPLES
Return exception response 0x02 Illegal Address and clear after 5 requests
` curl -X POST http://localhost:8080 -d '{"response_type": "error", "error_code": 2, "clear_after": 5}'`
Return Empty response
` curl -X POST http://localhost:8080 -d '{"response_type": "empty"}'`
Return Stray response of length 25bytes
` curl -X POST http://localhost:8080 -d '{"response_type": "stray", "data_len": 25}'`
Delay responses by 3 seconds
` curl -X POST http://localhost:8080 -d '{"response_type": "delayed", "delay_by": 3}'`
Revert to normal responses
` curl -X POST http://localhost:8080 -d '{"response_type": "normal"}'`
## TODO
- Add REST Api endpoint to view current manipulator config.