control.damp(sys) #879
Replies: 5 comments
-
|
It's not clear what you mean by "do[es] not deal correctly with overdamped modes", though I've taken a guess (see below). If I'm wrong, could you give us more detail, preferably as code, with inputs and actual and expected outputs? You can prevent printing by setting argument My guess is that you want |
Beta Was this translation helpful? Give feedback.
-
|
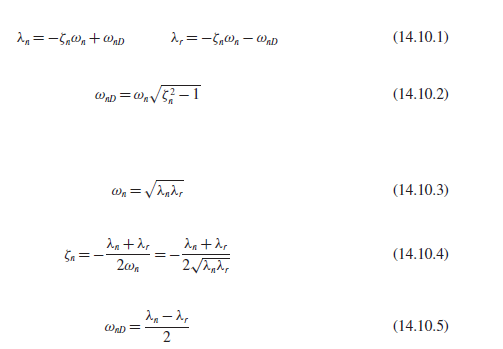
We can determine it, assuming we have those eigenvalues (poles location):
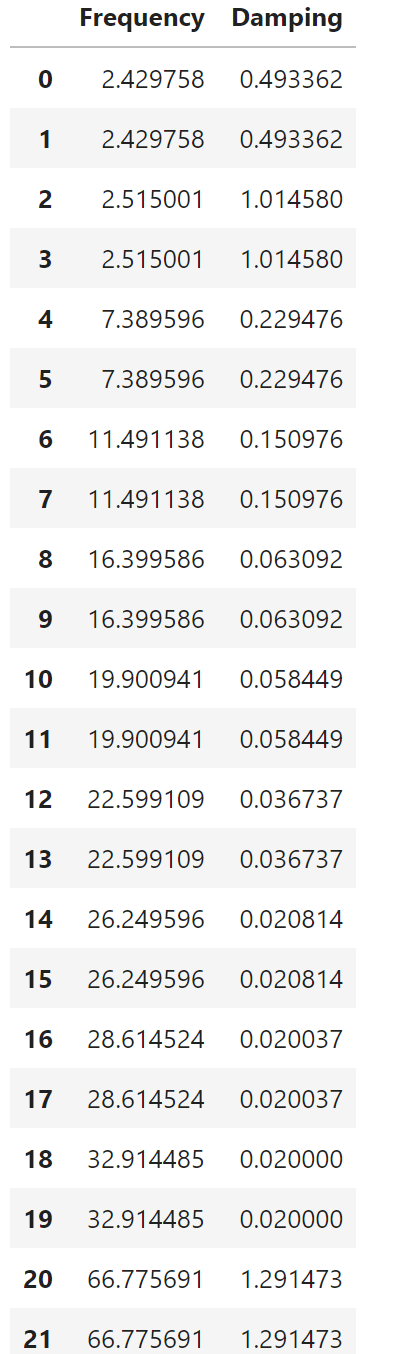
We can follow the equations here: The results will be like this: |

Beta Was this translation helpful? Give feedback.
-
|
You didn't say what (14.10.3) and (14.10.4) look OK, and I think (14.10.2) is defining It's not so obvious what (14.10.1) (and (14.10.5), which can be derived from (14.10.1)) is for. What are either over-damped If I apply these equations to the real poles in your example, I don't get the values for the two definitions of def overdamped(ln, lr):
if not ln.imag == 0 and lr.imag == 0:
raise ValueError('poles must be real')
if not lr < ln < 0:
raise ValueError('require lr<ln<0')
wn = (ln * lr) ** 0.5
zeta = -(ln + lr) / 2 / wn
wnd1 = wn * (zeta**2 - 1)
wnd2 = 0.5 * (ln - lr)
print(f'{wn=:.4f}, {zeta=:.4f}, {wnd1=:.4f}, {wnd2=:.4f}')
overdamped(-31.67, -140.8)
overdamped(-2.121, -2.983)gives |
Beta Was this translation helpful? Give feedback.
-
|
I hope this will clarify the issue
|

Beta Was this translation helpful? Give feedback.
-
|
@Nabil-Bishtawi Damping computation relies heavily on the classical first or second order system interpretation. When you have the system order larger than two, you are basically hoping to separate things into second and first order systems. You can still do this but you can't take the analogy too far. Especially if you have more than two real axis poles you don't know which one should be grouped with which pole to assume overdamped 2nd order system. For example, if you have poles (-1, -4, -4.4) how do you decide? That's why damp and other natural frequency computations (including matlab) is done per pole basis. They don't give too much information about the system anyways but it is typically used in the educational context. For this reason the algorithm for computing damping is the |
Beta Was this translation helpful? Give feedback.
-
control.damp(sys) do not deal correctly with overdamped modes and built in print function inside it should be deactivated because even if you put it wn[i],damping[i],eig[i]=control.damp(sys[i]) it is still printing every thing
Beta Was this translation helpful? Give feedback.
All reactions