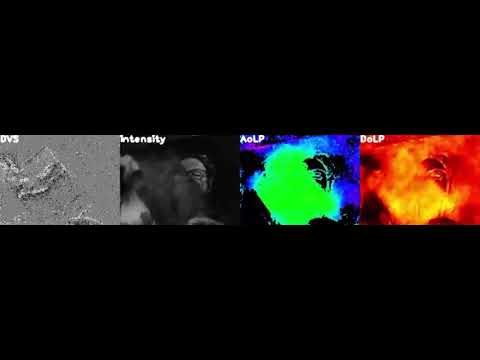
The subject first holds a single polarization filter, then pans around the room. Then finally a set of 3 triangular polarization filters arranged at 60 degree angles. The E2P input is DVS voxel volumes of 5 frames (the final one is rendered as DVS) and output is the E2P reconstructed intensity, angle, and degree of linear polarization.
The polarization event camera PDAVIS is a novel bio-inspired neuromorphic vision sensor that outputs both conventional polarization frames and asynchronous, continuously per-pixel polarization brightness changes (polarization events) with fast temporal resolution and large dynamic range.

This project enables live demonstration of the E2P PDAVIS as illustrated in the video.
- See subfolder train for training new and improved E2P DNNs and for the PDAVIS E2P dataset.
- See PDAVIS shared google drive for PDAVIS raw data and other material used to prepare the first PDAVIS camera publication Gruev2022.
From terminal
-
create virtual environement. (Here we use virtualenv, but conda env works fine too.)
mkvirtualenv pdavis_demo -
Python 3.8.10, CUDA 11.3, PyTorch == 1.11.0+cu113, TorchVision == 0.12.0+cu113
workon pdavis_demo pip install torch==1.11.0+cu113 torchvision==0.12.0+cu113 torchaudio==0.11.0 --extra-index-url https://download.pytorch.org/whl/cu113 -
install libcear. Building pyaer (below) will probably also require building libcaer from source using a particular checkpoint as shown below.
sudo apt-get update sudo apt-get install build-essential pkg-config libusb-1.0-0-dev git clone https://gitlab.com/inivation/dv/libcaer.git cd libcaer git checkout e68c3b4c115f59d5fd030fd44db12c702dddc3a5 # note you need this particular version sudo apt install cmake cmake -DCMAKE_INSTALL_PREFIX=/usr . make -j sudo make install -
Build pyaerfrom source (needed because pyaer master is broken at this time).
-
install other dependencies
pip install -r requirements.txt
We successfully run the PDAVIS demo on Windows 11 inside a WSL2 virtual Ubuntu 22 using usbipd to map the PDAVIS to WSL2.
- We use the handy Windows utility wsl-usb-gui to control usbipd
- We use the great Windows X server VcXsrv to develop with pycharm and display the demo output to the Windows 11 desktop.
- VcXsrv needs to be set to disable access control
- The pretrained polarization reconstruction model e2p-0317_215454-e2p-paper_plus_tobi_office-from-scratch.pth is in the models folde.
- Connect hardware: PDAVIS to USB.
In a terminal at root of e2p project run
python -m pdavis_demoOnce the demo is running, you can control it via keystroke commands in the terminal windows and the separate DVS (producer) and reconstruction (consumer) windows. Type 'h' in the window to see help printed to terminal for available commands. pdavis_demo uses python Queue to send voxel frames from producer to consumer processes.
This method splits to 2 terminal processes but is limited to smaller frame size by UDP transport.
- In first terminal run producer
python -m producer
- In a second terminal run consumer
python -m consumer
Using player to play back a dataset h5 file
python -m player


Figure 1: PDAVIS live demo: (top) PDAVIS camera and (bottom) polarization reconstruction results.
The output files are automatically saved at the location specified by the variable RECORDING_FOLDER in globals_and_utils.py:
./output
├── xxx
│ ├── xxx
│ | ├── xxx.png
│ | └── ...
│ ├── xxx
│ | ├── xxx.png
│ | └── ...
│ └── xxx
├── xxx
│ ├── xxx
│ | ├── xxx.png
│ | └── ...
│ ├── xxx
│ └── xxx
└── xxx
If you find this project useful, please consider citing:
@INPROCEEDINGS{Gruev2022-pdavis-cvprw,
title = "{PDAVIS}: Division of focal plane asynchronous
polarization imager",
booktitle = "{CVPRW} Workshop on Event Based Vision",
author = "Gruev, Viktor and Haessig, Germain and Joubert, Damien and
Haque, Justin and Milde, Moritz and Delbruck, Tobi",
publisher = "IEEE",
pages = "(accepted)",
year = 2023,
url = "https://tub-rip.github.io/eventvision2023/",
keywords = "event based camera; polarization camera; asynchronous
polarization camera;",
language = "en",
conference = "Polarization: Measurement, Analysis, and Remote Sensing XV",
location = "Vancouver"
}
@INPROCEEDINGS{Delbruck2023-e2p-demo,
title = "Live Demo: {E2P--Events} to Polarization Reconstruction
from {PDAVIS} Events",
booktitle = "{CVPRW} Workshop on Event Based Vision",
author = "Delbruck, Tobi and Wang, Zuowen and Mei, Haiyang and
Haessig, Germain and Joubert, Damien and Haque, Justin and
Chen, Yingkai and Milde, Moritz B and Gruev, Viktor",
publisher = "IEEE",
pages = "(accepted)",
year = 2023,
location = "Vancouver"
}
@INPROCEEDINGS{Meil2023-e2p-cvpr,
title = "Deep Polarization Reconstruction with {PDAVIS} Events",
booktitle = "{CVPR}",
author = "Meil, Haiyang and Wang, Zuowen and Yang, Xin and Wei,
Xiaopeng and Delbruck, Tobi",
publisher = "IEEE",
pages = "(accepted)",
year = 2023,
location = "Vancouver"
}
Tobi Delbrück (tobi@ini.uzh.ch)