Camera frames do not correspond to the docs #33
Comments
|
Hi Kim, |
|
Just to be clear, what I'm doing here is using the following script to publish frames on import rospy
import rostopic
import geometry_msgs.msg
import tf2_ros
class Listener:
def __init__(self, topic):
self.msg = None
msg_type = rostopic.get_topic_class(topic)[0]
self.sub = rospy.Subscriber(topic, msg_type, self.set_msg)
def set_msg(self, msg):
self.msg = msg
def wait_for_message(topic):
msg_type = rostopic.get_topic_class(topic)[0]
return rospy.wait_for_message(topic, msg_type)
def pose_to_transform(pose):
tf = geometry_msgs.msg.Transform()
tf.translation.x = pose.position.x
tf.translation.y = pose.position.y
tf.translation.z = pose.position.z
tf.rotation.w = pose.orientation.w
tf.rotation.x = pose.orientation.x
tf.rotation.y = pose.orientation.y
tf.rotation.z = pose.orientation.z
return tf
rospy.init_node('ambf_state_publisher')
ambf_static = {
'psm1/baselink': wait_for_message('/ambf/env/psm1/baselink/State'),
'psm2/baselink': wait_for_message('/ambf/env/psm2/baselink/State'),
}
ambf_moving = {
'Needle': Listener('/ambf/env/Needle/State'),
'CameraFrame': Listener('/ambf/env/CameraFrame/State'),
'cameraL': Listener('/ambf/env/cameras/cameraL/State'),
'cameraR': Listener('/ambf/env/cameras/cameraR/State'),
'Entry1': Listener('/ambf/env/Entry1/State'),
'Entry2': Listener('/ambf/env/Entry2/State'),
'Entry3': Listener('/ambf/env/Entry3/State'),
'Entry4': Listener('/ambf/env/Entry4/State'),
'Exit1': Listener('/ambf/env/Exit1/State'),
'Exit2': Listener('/ambf/env/Exit2/State'),
'Exit3': Listener('/ambf/env/Exit3/State'),
'Exit4': Listener('/ambf/env/Exit4/State'),
# 'psm1/toolyawlink': Listener('/ambf/env/psm1/toolyawlink/State'),
# 'psm2/toolyawlink': Listener('/ambf/env/psm2/toolyawlink/State'),
}
tf_static_broadcaster = tf2_ros.StaticTransformBroadcaster()
tf_broadcaster = tf2_ros.TransformBroadcaster()
transforms = []
for k, v in ambf_static.items():
tf = geometry_msgs.msg.TransformStamped()
tf.header.stamp = rospy.Time.now()
tf.header.frame_id = 'world'
tf.child_frame_id = k
tf.transform = pose_to_transform(v.pose)
transforms.append(tf)
tf_static_broadcaster.sendTransform(transforms)
rate = rospy.Rate(30)
while not rospy.is_shutdown():
transforms = []
for k, v in ambf_moving.items():
if v.msg is None:
continue
tf = geometry_msgs.msg.TransformStamped()
tf.header.stamp = rospy.Time.now()
try:
tf.header.frame_id = v.msg.parent_name.data.replace('BODY ', '')
except AttributeError:
tf.header.frame_id = 'world'
tf.child_frame_id = k
tf.transform = pose_to_transform(v.msg.pose)
transforms.append(tf)
tf_broadcaster.sendTransform(transforms)
rate.sleep() |
|
Thanks for posting the code for visualizing the frames. I want to check what specific part of the camera_conventions.md do you think is incorrect.
|

|
Yes, if I'm not mistaken, the one you posted is rotated 180 deg about the Z axis compared to the actual one from the simulator. |
|
Umm, just so that we are on the same page, the conventions depicted in the two images are not related. This image:
shows the On the other hand, this image that you shared shows the
|


|
Maybe I'm completely misunderstanding something or I'm not explaining myself very well 😅 Let me try drawing: To be clear, I'm talking about how |

|
Oooohhh, wait! I now realize I was reading the figure wrong. Stupid me. Sorry to have you spend time on this :| |
|
No problem, happy to help. :) |
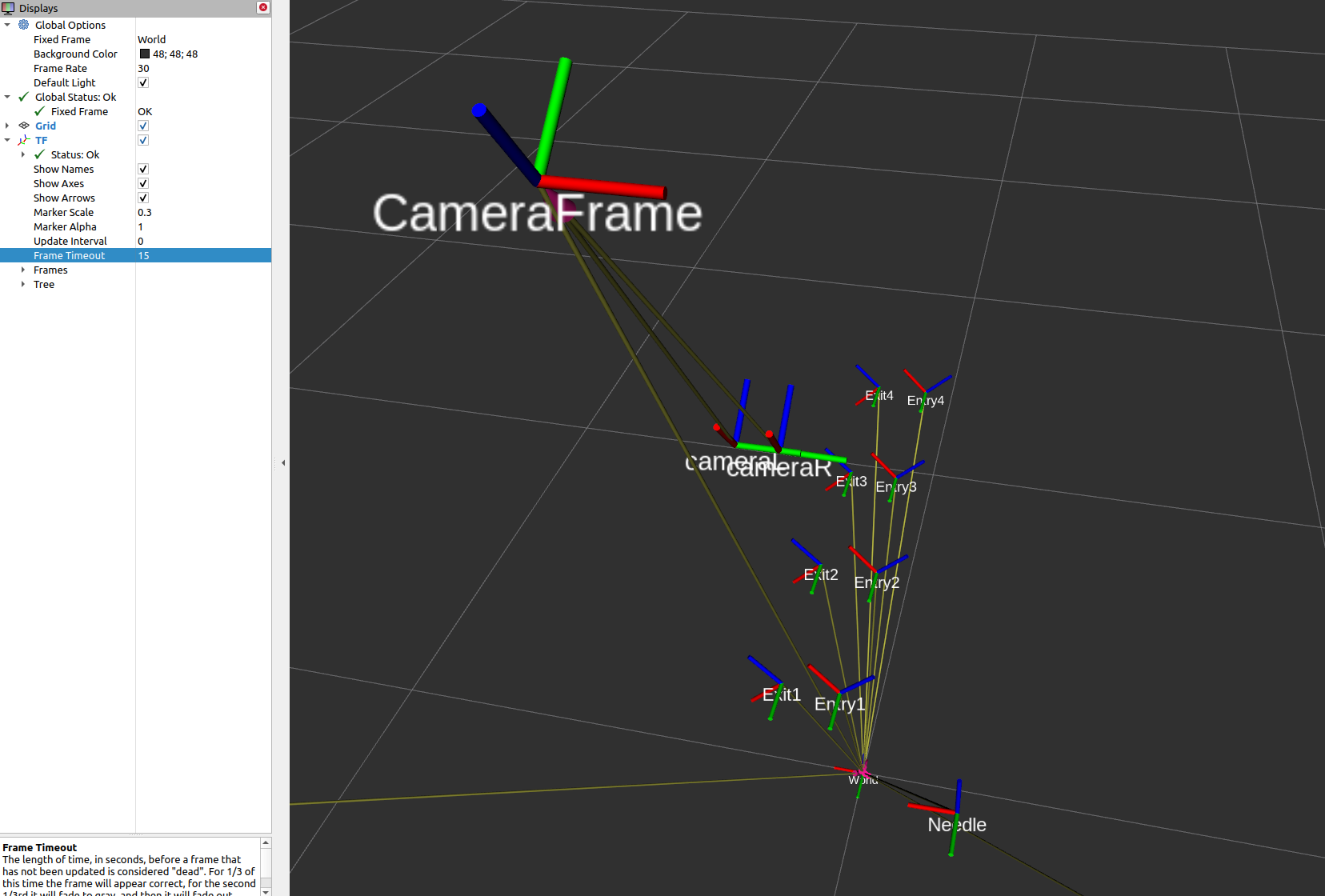
Hi,
I believe the
CameraLandCameraRframes do not correspond to what's in the docs -- they are rotated 180 degrees about their Z axis (which is pointing upward correctly).I have visualized the frames in RViz to confirm my suspicion:
The text was updated successfully, but these errors were encountered: