dsolve returns incorrect result for a first order non-linear ODE #19092
Comments
|
Also verified that the returned solution doesn't satisfy the diffeq: is not equal to zero. |
|
The code shown is missing brackets. I had to add those in to test this: In [16]: t, g, D = symbols('t, g, D', real=True, positive=True)
In [17]: eq = v(t).diff(t) + g - D*v(t)**2
In [18]: sol = dsolve(eq, v(t))
In [19]: sol
Out[19]:
√g
v(t) = ───────────────────────
√D⋅tanh(√D⋅√g⋅(C₁ - t))Okay so that's not what you were expecting. It is however a solution of the ODE: In [20]: checkodesol(eq, sol)
Out[20]: (True, 0)
In [21]: sol.rhs.diff(t) + g - D*(sol.rhs**2)
Out[21]:
⎛ 2 ⎞
g⋅⎝1 - tanh (√D⋅√g⋅(C₁ - t))⎠ g
───────────────────────────── + g - ─────────────────────
2 2
tanh (√D⋅√g⋅(C₁ - t)) tanh (√D⋅√g⋅(C₁ - t))
In [22]: simplify(_)
Out[22]: 0This form of the solution means that the constant is imaginary: In [78]: C1 = Symbol('C1')
In [68]: sol.subs(t, 0).subs(v(0), 0)
Out[68]:
√g
0 = ─────────────────
√D⋅tanh(C₁⋅√D⋅√g)
In [69]: solve(sol.subs(t, 0).subs(v(0), 0), C1)
Out[69]:
⎡ -ⅈ⋅π ⅈ⋅π ⎤
⎢───────, ───────⎥
⎣2⋅√D⋅√g 2⋅√D⋅√g⎦Substituting the constant and simplifying gives the expected result (same for either choice of constant): In [70]: C11, C12 = solve(sol.subs(t, 0).subs(v(0), 0), C1)
In [73]: sol.subs(C1, C11).simplify()
Out[73]:
-√g⋅tanh(√D⋅√g⋅t)
v(t) = ──────────────────
√D
In [74]: sol.subs(C1, C12).simplify()
Out[74]:
-√g⋅tanh(√D⋅√g⋅t)
v(t) = ──────────────────
√D So I think everything is working fine apart from using In [77]: dsolve(eq, ics={v(0): 0})
---------------------------------------------------------------------------
NotImplementedError Traceback (most recent call last)
<ipython-input-77-719c6d816cc5> in <module>
----> 1 dsolve(eq, ics={v(0): 0})
~/current/sympy/sympy/sympy/solvers/ode/ode.py in dsolve(eq, func, hint, simplify, ics, xi, eta, x0, n, **kwargs)
651 # The key 'hint' stores the hint needed to be solved for.
652 hint = hints['hint']
--> 653 return _helper_simplify(eq, hint, hints, simplify, ics=ics)
654
655 def _helper_simplify(eq, hint, match, simplify=True, ics=None, **kwargs):
~/current/sympy/sympy/sympy/solvers/ode/ode.py in _helper_simplify(eq, hint, match, simplify, ics, **kwargs)
705 if ics and not 'power_series' in hint:
706 if isinstance(rv, (Expr, Eq)):
--> 707 solved_constants = solve_ics([rv], [r['func']], cons(rv), ics)
708 rv = rv.subs(solved_constants)
709 else:
~/current/sympy/sympy/sympy/solvers/ode/ode.py in solve_ics(sols, funcs, constants, ics)
819
820 if len(solved_constants) > 1:
--> 821 raise NotImplementedError("Initial conditions produced too many solutions for constants")
822
823 return solved_constants[0]
NotImplementedError: Initial conditions produced too many solutions for constants |
|
@oscarbenjamin why it is returning |
|
That's correct. The initial condition handling code needs to be improved to give solutions for all values of the constant. |
|
Any particular reason for not returning all solutions? On of the test case says for returning one of the solutions instead of raising. sympy/sympy/solvers/ode/tests/test_ode.py Lines 100 to 104 in 5db74b0 |
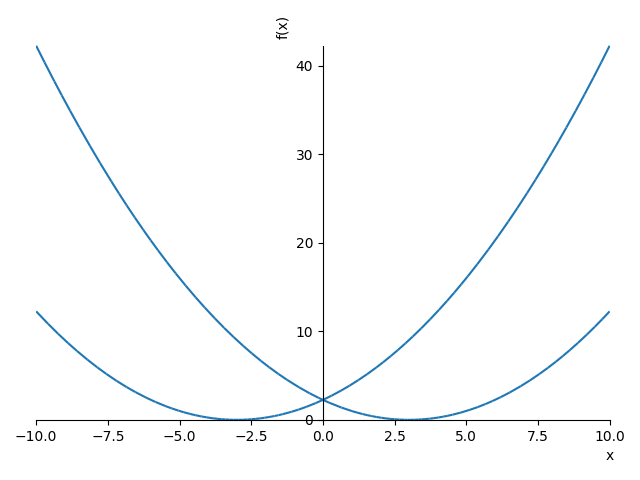
There can be a reason for not returning all solutions. Some methods in particular separation of variables can lead to multiple solutions where some do not in fact satisfy the original ODE. Let's do it manually. We'll assume that x and t are real although dsolve should not always We can see that the solution curves in the x, t plane are parabolas that look like In [54]: sol = dsolve(x(t).diff(t) + sqrt(x(t)))
In [55]: C1 = Symbol('C1')
In [60]: p1 = plot(sol.rhs.subs(C1, -3), show=False)
In [61]: p2 = plot(sol.rhs.subs(C1, +3), show=False)
In [62]: p1.append(p2[0])
In [63]: p1.show()
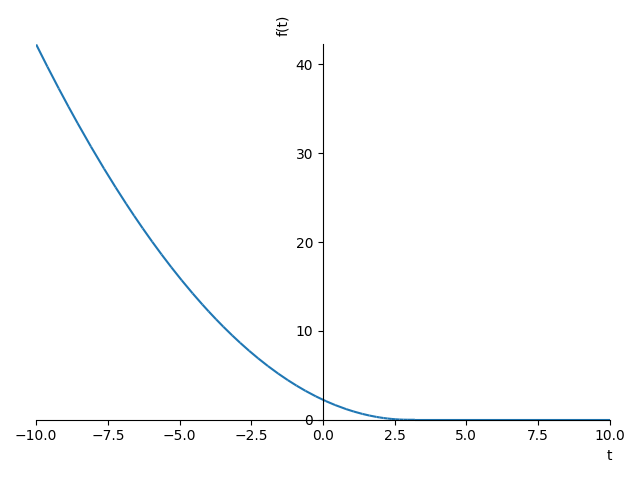
But an IVP should normally have a unique solution. Looking more carefully these solution curves are not everywhere valid. The ODE is Where did we go wrong? We divided by In [82]: sol_full = Piecewise((sol.rhs.subs(C1, -3), t < 3), (0, True))
In [83]: sol_full
Out[83]:
⎧ 2
⎪t 3⋅t 9
⎪── - ─── + ─ for t < 3
⎨4 2 4
⎪
⎪ 0 otherwise
⎩
In [84]: plot(sol_full)
Out[84]: <sympy.plotting.plot.Plot at 0x116479cd0>
Why don't the normal uniqueness conditions for ODEs work here? Our solution is only valid for This means that our solution found is only valid when x is not zero so the decreasing and increasing parts of each solution curve are not connected following the ODE. You can see also the discussion here: What this means for sympy is that:
There are however other cases where different values for the constant might lead to equivalent solutions e.g.: In this sort of case any choice for the constant would be acceptable. |
Input equation:
Output expression:
Eq(v(t), sqrt(g)/( sqrt(D)*tanh( sqrt(D)*sqrt(g)*(C1-t))))However, the correct answer to this should have
tanh(sqrt(D)*sqrt(g)*(C1+t)in the numerator. So the correct output should be something like:
Eq(v(t), (sqrt(g)*(tanh(sqrt(D)*sqrt(g)*(C1+t)) / sqrt(D)This appears to be a regression as the textbook "Elementary Mechanics using Python" uses an older version of sympy on page 71 and it returns the correct answer. The analytic solution solving the diffeq and showing tanh is in the numerator is on page 70. This book is currently free from springer (https://link.springer.com/book/10.1007/978-3-319-19596-4)
The solution with tanh in the numerator was also verified using mathematica.
The text was updated successfully, but these errors were encountered: