This is a small interactive demo of the A* search algorithm.
I hope it may be useful for anyone either learning A* search or looking for code to copy/paste or port into their app.

You'll need the löve game engine in order to run this code.
The instructions below are for mac users; for windows or linux, I believe double-clicking on the
demo.love file in your gui will work.
$ git clone https://github.com/tylerneylon/a_star_search_demo.git
$ cd a_star_search_demo
$ open demo.love
There are 2 path-drawing modes, and a maze-editing mode. Switch modes using the 3 top-left buttons.
Click any grid square to see the found shortest path from your mouse click to the goal circle in the upper-right grid square.
Click on any grid square to toggle it between being a wall or open space.
The default maze is saved in the human-friendly file maze.data.
Right now the "save maze" button works only when run from a shell.
That is, when you start the app by running love . in the repo's directory;
as a prerequisite, you'd have to have created a symlink from your PATH directly
to the core Löve binary within the main Löve app bundle so the love command
makes sense to your shell.
The save button is fragile like this because, when your app is run from a
.love file, Löve is actually running things from a temporary directory
behind the scenes and interferes with Lua's default file access setup.
You do have the option of editing maze.data and then recreating demo.love
like this:
$ zip demo.love main.lua maze.data
If you use that method, you can effectively change the maze and interact with
it via the default start-Löve-from-the-gui method (or by running open demo.love from a shell
on a mac).
This algorithm starts with the output of an A* search and then improves on it by finding straight-line segments that may be diagonal but are not interrupted by a wall. Internally, it uses a 2d ray-marching sub-algorithm to determine when a candidate diagonal hits a wall.
Intuitively, suppose we're considering the shortcut indicated by the blue line below.
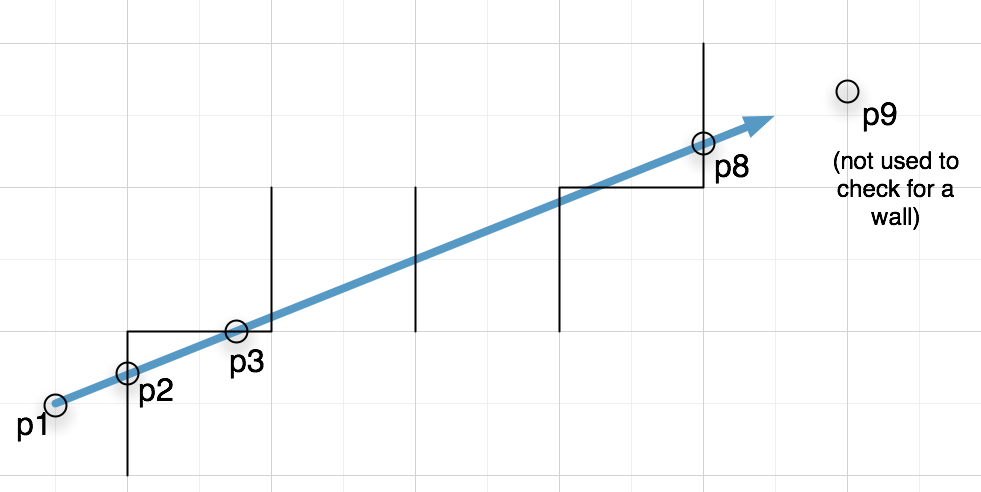
The ray-marching subalgorithm will locate each of the points p1, p2, p3, etc. until
it reaches the destination. Along the way it will check each potential wall for existence.
In the picture above, potential walls are indicated by black lines.
If no walls are encountered, the shortcut is taken.
As far as I know, this improvement is independent and original. However, I haven't done any research on it, so maybe it is already well-known. It is also not guaranteed to find all possible shortcuts, as it takes them greedily and will sometimes miss an opportunity because of that.
As a side note, it is possible to implement A* more efficiently by using a data
structure called a heap to more efficiently find the value of best_pt during
each iteration of the main loop in find_path. The current code will take
linear time to find best_pt, whereas it could theoretically take log(n) time
instead. In practice, for small-ish grids or paths, the added simplicity of the
current code may actually be faster in many specific cases, though.
I'd be happy if anyone uses this code either directly or indirectly via porting to your favorite language. I hope this code may also be useful for anyone interested in learning about A* search.
Other great A* search pages: