{kind=link}
Project Page | Paper | Dataset | Results
Xin Huang1,
Qi Zhang2,
Ying Feng2,
Hongdong Li3,
Qing Wang1
1Northwestern Polytechnical University, 2Tencent AI Lab, 3Australian National University
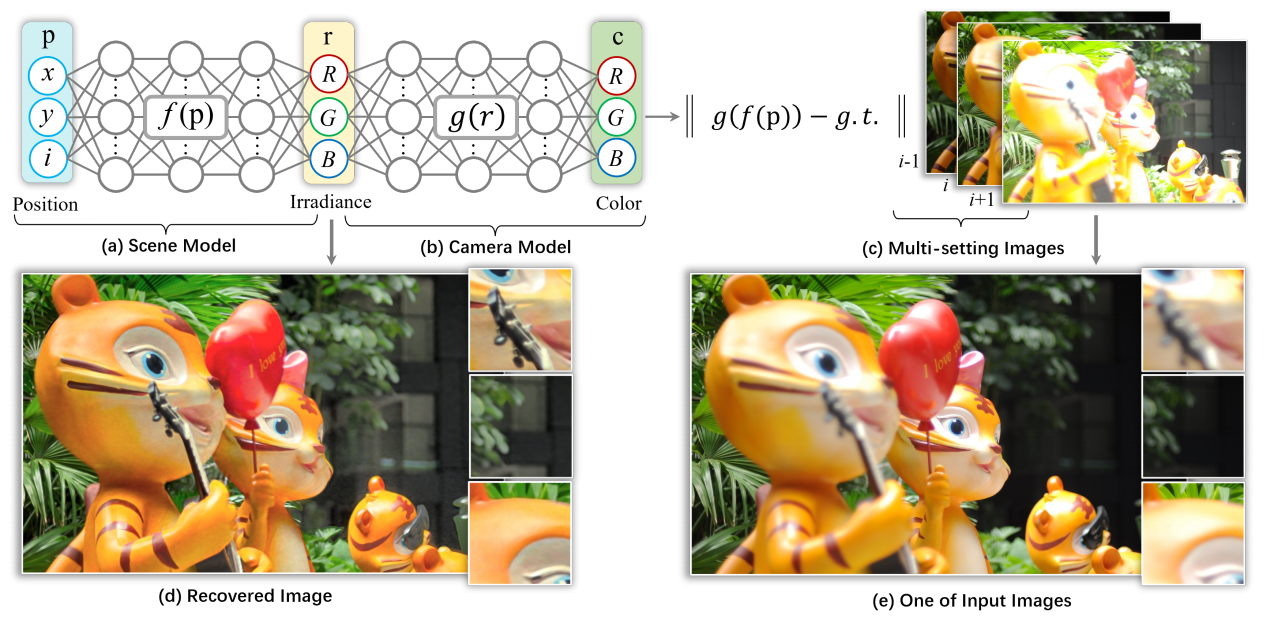
This is the official implementation of the paper "Inverting the Imaging Process by Learning an Implicit Camera Model". Our method, Neucam, is able to recover all-in-focus HDR images from images captured with multi-setting images (multi-exposure and multi-focus). Moreover, Neucam has the potential to benefit a wide array of other inverse imaging tasks such as video deblurring and video HDR Imaging.
If you want to reproduce all the results shown in the paper, you can then set up a conda environment with all dependencies like so:
conda env create -f environment.yml
conda activate neucam
We have prepared several sample datasets for NeuCam training. You can download these test samples via the provided link. Once downloaded, please extract the files and place them in the ./dataset directory of this GitHub repository. For instance, your file path should look something like this: ./dataset/MFME.
- MFME directory contains 4 real-world scenes and 4 synthetic scenes. Each scene contains 9 images of 3 different focuses and 3 different exposures. The real-world images are captured by a digital camera with a tripod, and the synthetic images are rendered in Blender.
- MF-static directory contains 8 real-world scenes. Two images focusing on the foreground and background respectively are captured for each scene.
- ME-dynamic directory contains 5 real-world dynamic scenes from the HDR imaging dataset. Three images with different exposures are captured for each scene.
- Video-deblur directory contains two videos from the Deep Video Deblurring dataset, characterized by camera motion blur.
- Video-hdr directory contains two videos from the Deep HDR Video dataset, notable for their varying exposure levels.
The directory experiment_scripts contains scripts used for the experiments in our paper. The directory configs contains parameter settings for all these experiments. To keep track of your progress, the training code generates TensorBoard summaries and stores them in a "summaries" subdirectory located within the logging_root.
- The all-in-focus HDR imaging experiment can be reproduced with
python experiment_scripts/train_video.py -c configs/config_mfme_blender.txt # blender dataset
python experiment_scripts/train_video.py -c configs/config_mfme_nikon.txt # nikon dataset
- The all-in-focus imaging experiment can be reproduced with
python experiment_scripts/train_video.py -c configs/config_mf_static.txt
- The HDR imaging experiment can be reproduced with
python experiment_scripts/train_video.py -c configs/config_me_dynamic.txt
- The video deblurring experiment can be reproduced with
python experiment_scripts/train_video.py -c configs/config_video_deblur.txt
- The video HDR imaging experiment can be reproduced with
python experiment_scripts/train_video.py -c configs/config_video_hdr.txt
Upon completion of the training, both the model and the results will be stored in the ./results directory. Please note that the final all-in-focus and HDR results are produced post-inference.
To render the all-in-focus and HDR results, you can run
python experiment_scipts/render_video.py -c <path_to_saved_results>/config.txt --checkpoint_path=<path_to_saved_results>
The term <path_to_saved_results> refers to the specific location where the trained model and results are stored during the training process. An example of this could be ./results/20231018/Dog_145236.
We also offer results generated by our method. These can be downloaded using the provided link. Please note that all HDR results in the experiment have been tonemapped using Photomatix. For visualization of HDR results, we recommend installing either Phototmatix or Luminance HDR.
If you find our work useful in your research, please cite:
@inproceedings{huang2023inverting,
title={Inverting the Imaging Process by Learning an Implicit Camera Model},
author={Huang, Xin and Zhang, Qi and Feng, Ying and Li, Hongdong and Wang, Qing},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={21456--21465},
year={2023}
}
Our project is benefit from these great resources:
- Implicit Neural Representations with Periodic Activation Functions.
- Layered Neural Atlases for Consistent Video Editing.
We are grateful for their contribution in sharing their code.