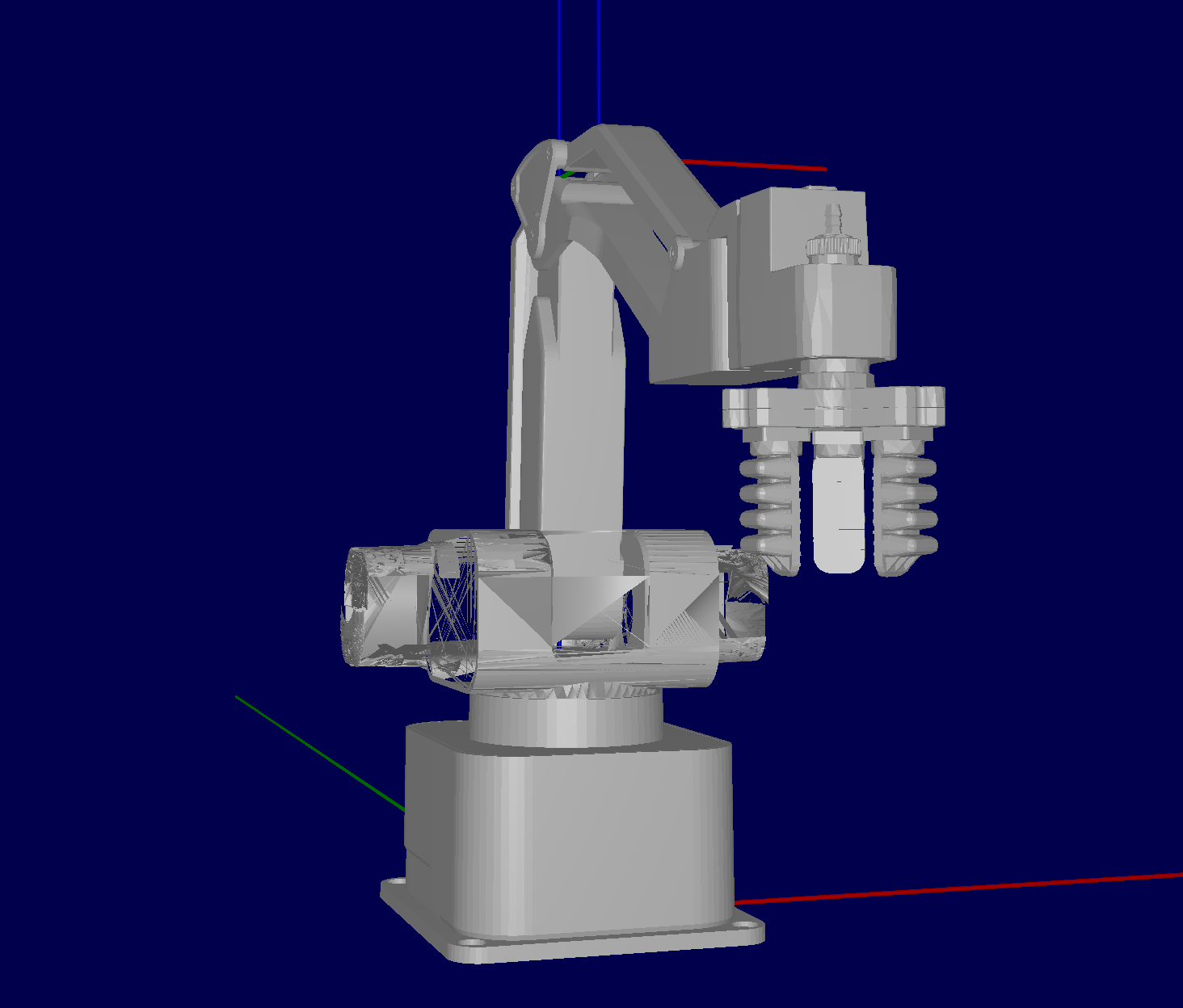
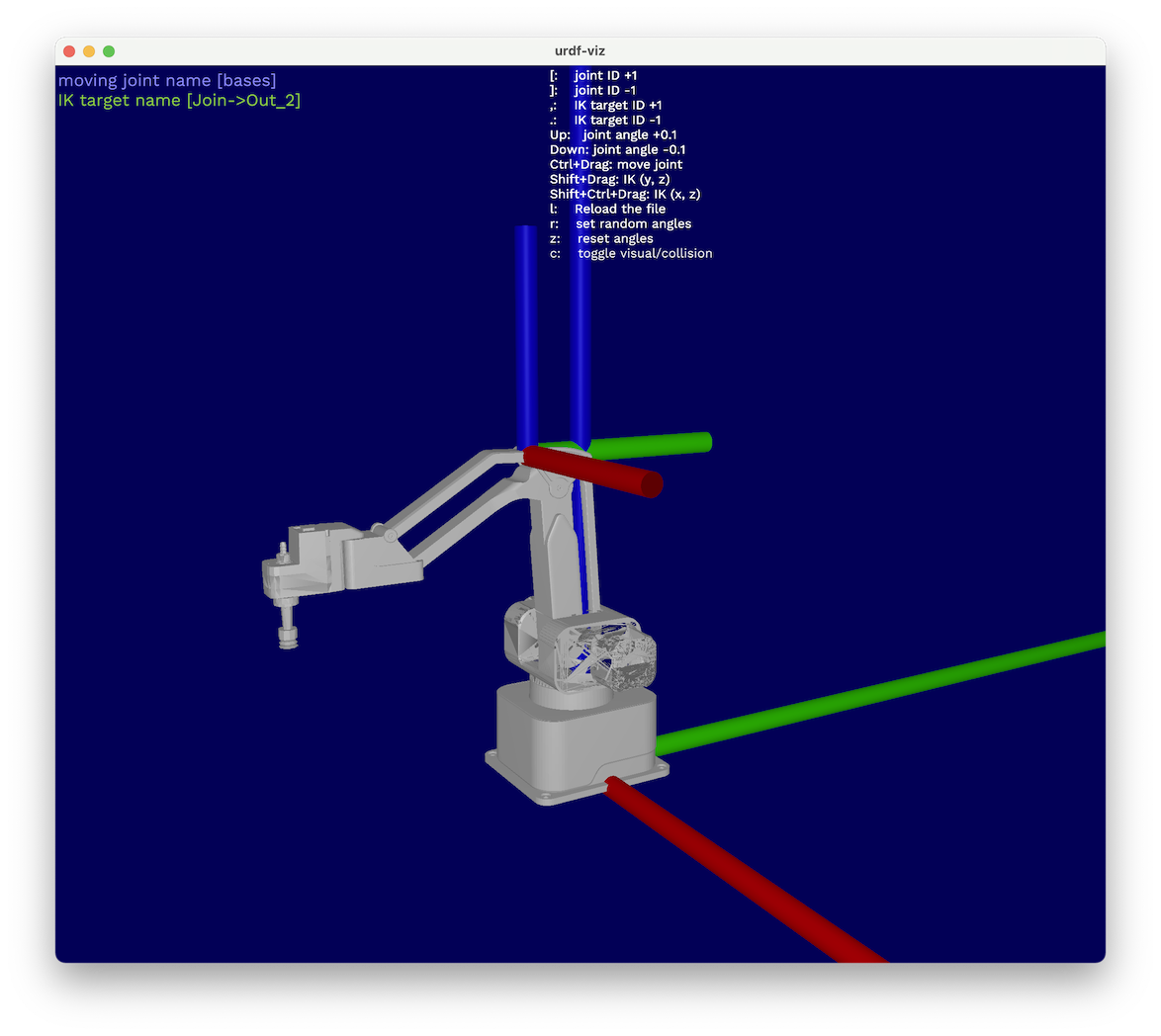
WIP URDF of DexArm with corresponding STL for mesh descriptions. (Un)comment module to switch EE. Approximating the soft gripper with segments and joint mimicing Screenshot produced via URDF-Viz
{kind=link}
{kind=link}
{kind=link}