- Overview
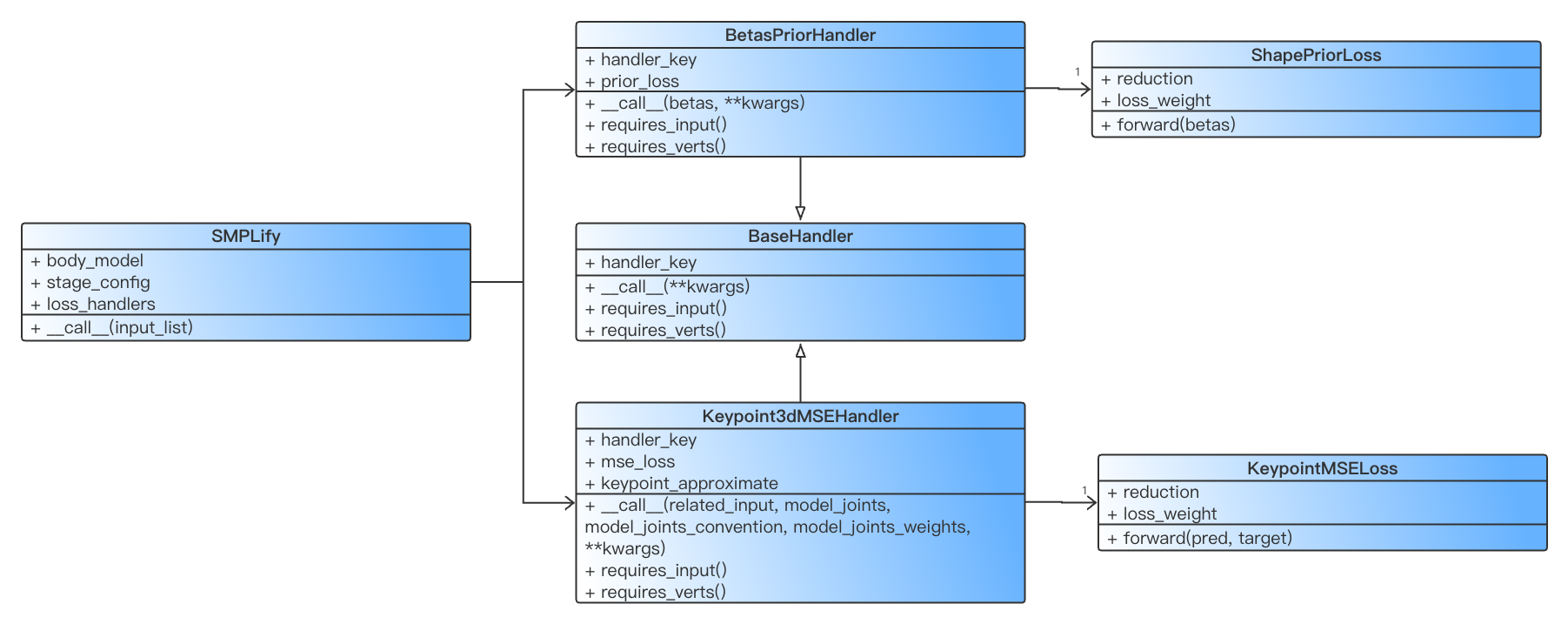
- Relationships between classes
- Build a registrant
- Prepare the input and run
- Develop a new loss
- How to write a config file
SMPLify and SMPLifyX are two registrant classes for body model fitting.
-
registrant:
SMPLifyandSMPLifyX, which holds loss_handlers and get losses of different stages byinput_list. -
loss_handlers : Sub-classes of
BaseHandler. It has ahandler_keyas ID for matching and verbose, a loss module for computation. A handler takes body_model parameters, and related input if necessary, prepare them for the loss module, and return loss value to registrant. -
loss module: Sub-classes of
torch.nn.Module. It has reduction, loss_weight and a forward method.
We need a config file to build a registrant, there's an example config at config/model/registrant/smplify.py.
from xrmocap.model.registrant.builder import build_registrant
smplify_config = dict(
mmcv.Config.fromfile('configs/modules/model/registrant/smplify.py'))
smplify = build_registrant(smplify_config)To create your own config file and smpl-fitting workflow, see guides.
We could have keypoints, pointcloud and meshes as input for optimization targets. To organize the input data, we need a sub-class of BaseInput. The input class for Keypoint3dMSEHandler is Keypoint3dMSEInput, and the input class for Keypoint3dLimbLenHandler is Keypoint3dLimbLenInput. A handler whose handler_key is keypoints3d_mse takes an input instance having the same key.
from xrmocap.model.registrant.handler.builder import build_handler
from xrmocap.transform.convention.keypoints_convention import convert_keypoints
# keypoints3d is an instance of class Keypoints
keypoints_smpl = convert_keypoints(keypoints=keypoints3d, dst='smpl')
kps3d = torch.from_numpy(keypoints_smpl.get_keypoints()[:, 0, :, :3]).to(
dtype=torch.float32, device=device)
kps3d_conf = torch.from_numpy(keypoints_smpl.get_mask()[:, 0, :]).to(
dtype=torch.float32, device=device)
kp3d_mse_input = build_handler(dict(
type=Keypoint3dMSEInput,
keypoints3d=kps3d,
keypoints3d_conf=kps3d_conf,
keypoints3d_convention='smpl',
handler_key='keypoints3d_mse'))
kp3d_llen_input = build_handler(dict(
type=Keypoint3dLimbLenInput,
keypoints3d=kps3d,
keypoints3d_conf=kps3d_conf,
keypoints3d_convention='smpl',
handler_key='keypoints3d_limb_len'))
smplify_output = smplify(input_list=[kp3d_mse_input, kp3d_llen_input])To develop a new loss and add it to XRMoCap SMPLify, you need 1 or 3 new classes. Here's a tutorial.
For loss module, we need reduction and loss weight.
class SmoothJointLoss(torch.nn.Module):
def __init__(self,
reduction: Literal['mean', 'sum', 'none'] = 'mean',
loss_weight: float = 1.0,
degree: bool = False,
loss_func: Literal['L1', 'L2'] = 'L1'):...
def forward(
self,
body_pose: torch.Tensor,
loss_weight_override: float = None,
reduction_override: Literal['mean', 'sum',
'none'] = None) -> torch.Tensor:...For loss handler, we find that existing BodyPosePriorHandler meets our requirement. We do not have to develop a new handler class. In config file, add SmoothJointLoss like below, it will be deployed when running.
handlers = [
dict(
handler_key='smooth_joint',
type='BodyPosePriorHandler',
prior_loss=dict(
type='SmoothJointLoss',
loss_weight=1.0,
reduction='mean',
loss_func='L2'),
logger=logger),
...
]For loss module, it computes between prediction and target.
class LimbLengthLoss(torch.nn.Module):
def __init__(self,
convention: str,
reduction: Literal['mean', 'sum', 'none'] = 'mean',
loss_weight: float = 1.0,
eps: float = 1e-4):...
def forward(
self,
pred: torch.Tensor,
target: torch.Tensor,
pred_conf: torch.Tensor = None,
target_conf: torch.Tensor = None,
loss_weight_override: float = None,
reduction_override: Literal['mean', 'sum',
'none'] = None) -> torch.Tensor:For loss handler, we need an input-handler pair. Users pass the input class to registrant, and the handler inside registrant takes the input and compute loss.
class Keypoint3dLimbLenInput(BaseInput):
def __init__(
self,
keypoints3d: torch.Tensor,
keypoints3d_convention: str = 'human_data',
keypoints3d_conf: torch.Tensor = None,
handler_key='keypoints3d_limb_len',
) -> None:...
def get_batch_size(self) -> int:...
class Keypoint3dLimbLenHandler(BaseHandler):
def __init__(self,
loss: Union[_LimbLengthLoss, dict],
handler_key='keypoints3d_limb_len',
device: Union[torch.device, str] = 'cuda',
logger: Union[None, str, logging.Logger] = None) -> None:...
def requires_input(self) -> bool:...
def requires_verts(self) -> bool:...
def get_loss_weight(self) -> float:...
def __call__(self,
related_input: Keypoint3dLimbLenInput,
model_joints: torch.Tensor,
model_joints_convention: str,
loss_weight_override: float = None,
reduction_override: Literal['mean', 'sum', 'none'] = None,
**kwargs: dict) -> torch.Tensor:...In the config file, there are some simple values for a registrant.
# value of type is the key in registry of build_registrant
# normally it is a class name
type = 'SMPLify'
verbose = True
info_level = 'step'
logger = None
n_epochs = 1
use_one_betas_per_video = True
ignore_keypoints = [
'neck_openpose', 'right_hip_openpose', 'left_hip_openpose',
'right_hip_extra', 'left_hip_extra'
]Instance attributes like body_model and optimizer are given as dictionaies.
body_model = dict(
type='SMPL',
gender='neutral',
num_betas=10,
keypoint_convention='smpl_45',
model_path='xrmocap_data/body_models/smpl',
batch_size=1,
logger=logger)
optimizer = dict(
type='LBFGS', max_iter=20, lr=1.0, line_search_fn='strong_wolfe')Handlers are given in a list of dict, and the loss module is a sub-dict of the handler dict. It is safe to build some handlers which won't be used. Although it takes time, no error will be caused by the handlers not in use.
handlers = [
dict(
handler_key='keypoints3d_mse',
type='Keypoint3dMSEHandler',
mse_loss=dict(
type='KeypointMSELoss',
loss_weight=10.0,
reduction='sum',
sigma=100),
logger=logger),
dict(
handler_key='shape_prior',
type='BetasPriorHandler',
prior_loss=dict(
type='ShapePriorLoss', loss_weight=5e-3, reduction='mean'),
logger=logger),
dict(
handler_key='joint_prior',
type='BodyPosePriorHandler',
prior_loss=dict(
type='JointPriorLoss',
loss_weight=20.0,
reduction='sum',
smooth_spine=True,
smooth_spine_loss_weight=20,
use_full_body=True),
logger=logger),
dict(
handler_key='pose_prior',
type='BodyPosePriorHandler',
prior_loss=dict(
type='MaxMixturePriorLoss',
prior_folder='xrmocap_data/body_models',
num_gaussians=8,
loss_weight=4.78**2,
reduction='sum'),
logger=logger),
dict(
handler_key='keypoints3d_limb_len',
type='Keypoint3dLimbLenHandler',
loss=dict(
type='LimbLengthLoss',
convention='smpl',
loss_weight=1.0,
reduction='mean'),
logger=logger),
]Stages are also given in a list of dict. It controls what loss to be used and what parameter to be updated in each stage. Weight or reduction can be override if {handler_key}_weight or {handler_key}_reduction is given.
stages = [
# stage 0
dict(
n_iter=10,
ftol=1e-4,
fit_global_orient=False,
fit_transl=False,
fit_body_pose=False,
fit_betas=True,
keypoints3d_mse_weight=0.0, # not in use
keypoints3d_limb_len_weight=1.0,
shape_prior_weight=5e-3,
joint_prior_weight=0.0,
pose_prior_weight=0.0),
# stage 1
dict(
n_iter=30,
ftol=1e-4,
fit_global_orient=True,
fit_transl=True,
fit_body_pose=True,
fit_betas=False,
keypoints3d_mse_weight=10.0,
keypoints3d_mse_reduction='sum',
keypoints3d_limb_len_weight=0.0,
shape_prior_weight=0.0,
joint_prior_weight=1e-4,
pose_prior_weight=1e-4,
body_weight=1.0,
use_shoulder_hip_only=False),
]