Original Author: Midgwick
Current Author: Kevin Walchko
License: GPL Ver. 2
Language: C++
Website: http://github.com/walchko/ahrs
This implements AHRS code written by Midgwick designed to take the readings from accelerometers, gyros, and magnetometers and calculate the pose (roll, pitch, and yaw) of the sensor.
The node does:
- Digital noise filtering
- Bias correction
- Calculates the roll, pitch, and yaw
- Calculates the compass heading (yaw is wrt North)
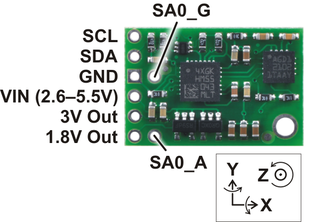
The data comes from the MiniIMU9 Ver 1 from Pololu which exposes an I2C interface to get the data. The Inertial Measurement Unit (IMU) has the following sensors:
- L3G4200D 3-axis gyro (16b reading)
- LSM303DLM 3-axis accelerometer and 3-axis magnetometer (both 12b readings)
The AHRS node currently grabs IMU data at 20 Hz (but that is changeable) and filters it with a Chebyshev Type II Infinite Impulse Response (IIR) filter. The Type II has a flat pass band response and a equiripple in the stop band. The filter is designed for:
- Sample Freq: 20 Hz
- Pass band: 0.8
- Stop band: 0.9
- Stop band Attenuation: 40 dB
- Order: 5
The filter is implemented as the following difference equation:
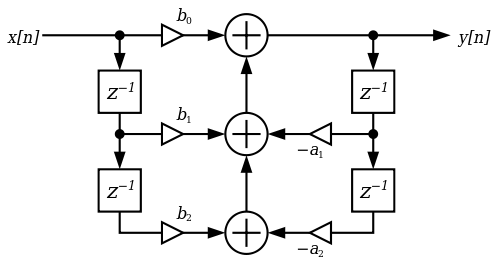
The digital filter was developed using Octave. In the octave directory are several m-files used to design the IIR filter. From the Octave command line type:
- load_imu
- imu_filter
This will load the data from test.txt which is just a csv file. Then the the order of the filter is determined and the filter is designed.

rosrun ahrs ahrs --no-filter --no-mags
no-filter Turns off the IIR filter
no-mags Turns off the magnetometers when determining the heading. This is useful when the AHRS magnetometers have not been compensated for hard iron distortion or the magnetic fields from motors are interfering. The AHRS will also no longer have a sense where magnetic North is, so yaw will be reported w.r.t. some initial arbitrary heading.
debug Print debug values to screen
beta Set the beta value
help Print help
imu is the IMU message from the soccer robot package (Imu.msg)
imu_reset (bool) resets the AHRS when true sent
imu_out (sensor_msgs/Imu)
Output is the filtered data with the magnetometer, gyros and accelerometers data fused into an orientation quaternion
- optimize for a specific sampling rate (Hz)
- clean up octave scripts
- turn IIR filter on or off
- turn off and on the magnetometers
- have it run through a scripted routine where it out puts accel data when the IMU is rotated through 6 different orientations. Routine displays a count down ( 3,2,1) to re-orient the IMU and then it averages 1 min of data in that orientation before the next count down begins. The average accel data is printed to screen.
Author: Kevin Walchko
License: BSD
Language: C++
Website: http://github.com/walchko/MiniIMU9/viewer
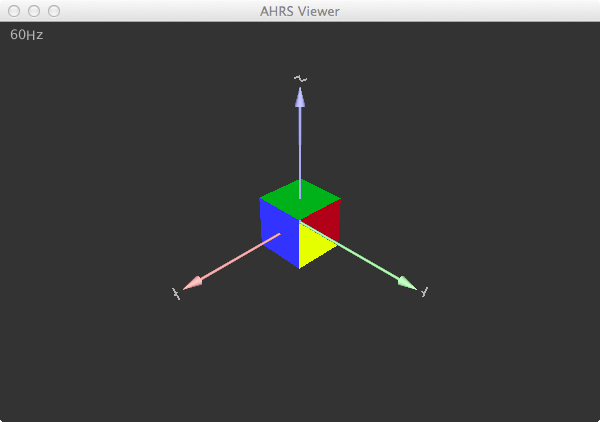
A QGLViewer that takes inputs from MiniIMU9 and displays the pose of the sensor in real-time. The viewer window takes the following input commands:
- ESC: close window
- Mouse Drag: spin
- Mouse Scroll: zoom in and out
Inertial axis with a cube representing the IMU orientation.
imu_out (sensor_msgs/Imu)
rosrun ahrs ahrs_view
- Still just getting this working, need to get things working completely