Bounding Box generation Error #150
Comments
|
The rest of the code, for if it's needed: |
|
That is a weird result for sure. Code seems to looks fine. What do the depth and segmentation images look like for those weird bounding boxes? |
|
I deleted those ones, but here are some new ones:
In general they look fine, I wouldn't say that it has to do with the model. |






|
Interesting. Are you using your own visualization tools to show the bounding box over the image? There are a couple different styles of bounding boxes, zpy uses |
|
Yes, I use my own script, but I'd say I got the style you say. Here is my script: |
|
Well yeah, it was my fault. That Sigh. Sorry, had my head somewhere else when I wrote this. Thanks for your support! |
|
All good! Glad I could help. |
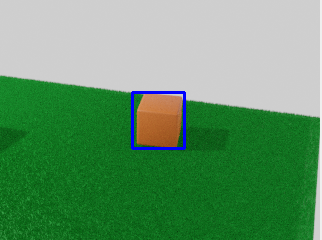
I've created this Blender scene where I have a dice, and I'm using ZPY to generate a dataset composed of images obtained by rotating around the object and jittering both the dice position and the camera. Everything seems to be working properly, but the bounding-boxes generated on the annotation file get progressively worse with each picture.
For example this is the first image's bounding-box:
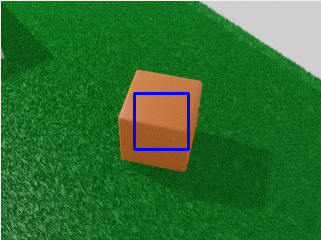
This one we get halfway through:
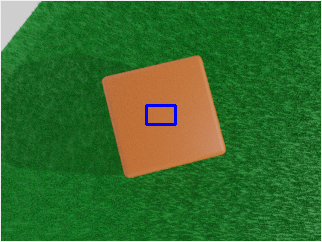
And this is one of the last ones:
This is my code (I've cut some stuff, I can't paste it all for some reason):
Is this my fault or an actual bug?
The text was updated successfully, but these errors were encountered: