
Welcome to Isaac ROS, a collection of NVIDIA-accelerated, high performance, low latency ROS 2 packages for making autonomous robots which leverage the power of Jetson and other NVIDIA platforms.
- Check out the getting started to start using Isaac ROS.
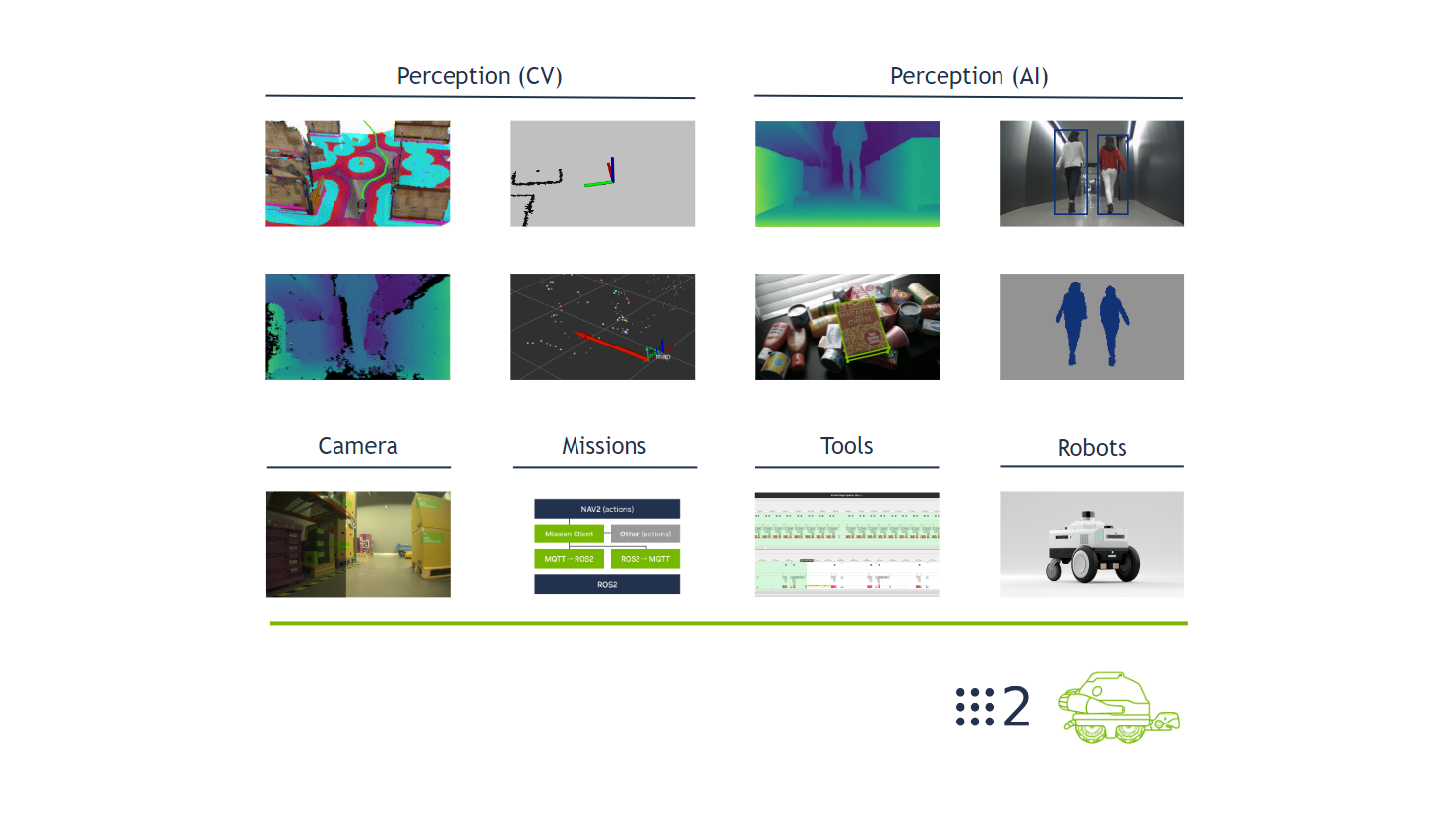
- Visit the repositories and packages to learn about specific packages.
- Familiarize yourself with concepts essential to Isaac ROS.
- Compare the performance of the packages on various platforms.
- Read the collection of blog posts for more information.
- Scan through the FAQs for answers to common questions.
- Reference the release notes for details on all updates made to Isaac ROS.