Recently, there have been some projects trying to use the RSSI signal of an RX5808 5.8GHz video receiver to detect when a quadcopter is passing close to the "base-station" to be able to count the laptimes.
I wanted to try this with my 90mm brushless quad in my little garden racetrack.
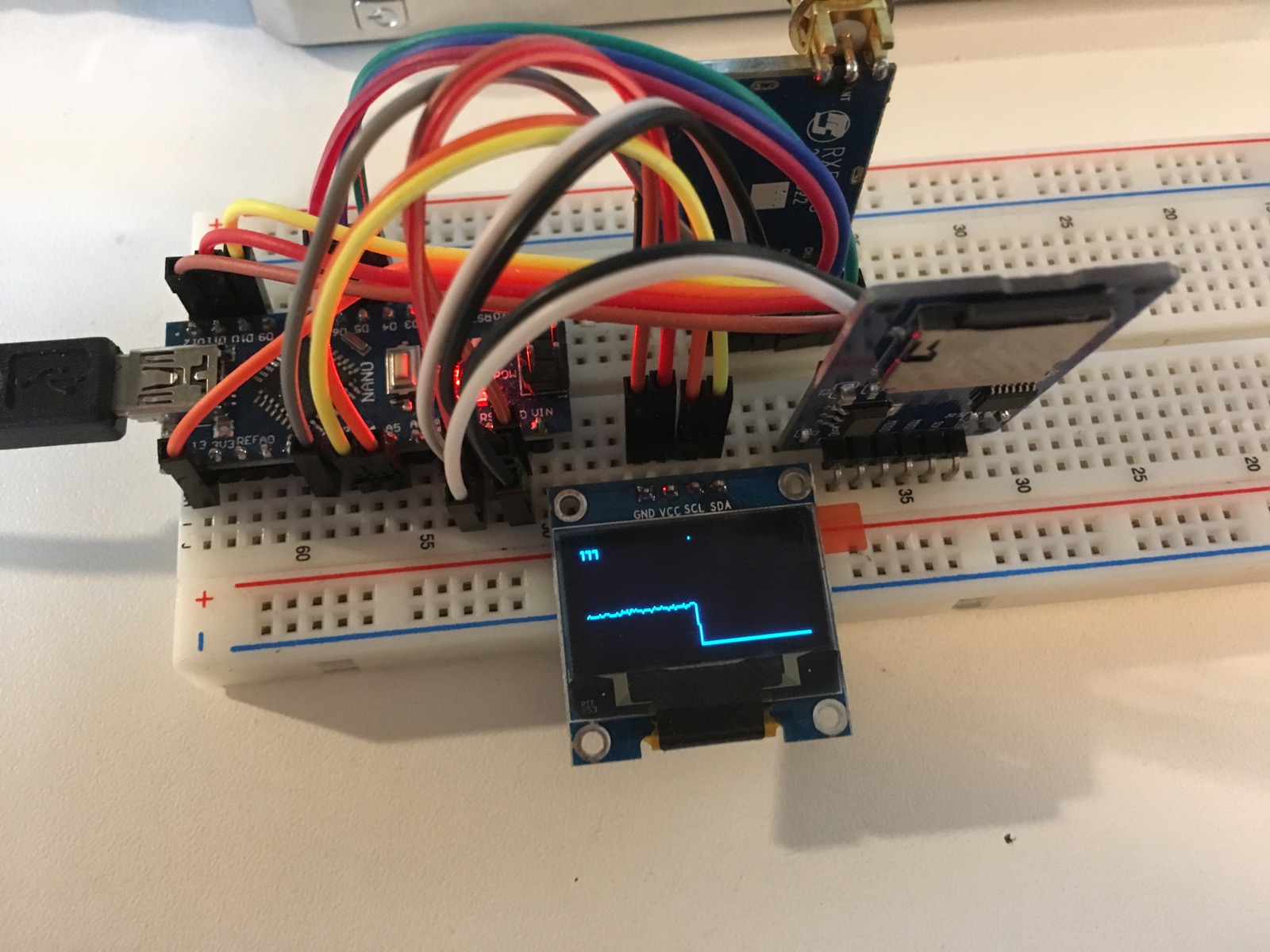
Unfortunately, it seems the RSSI signal is not really usable in such close ranges. That's why I've more-or-less abandoned this project.
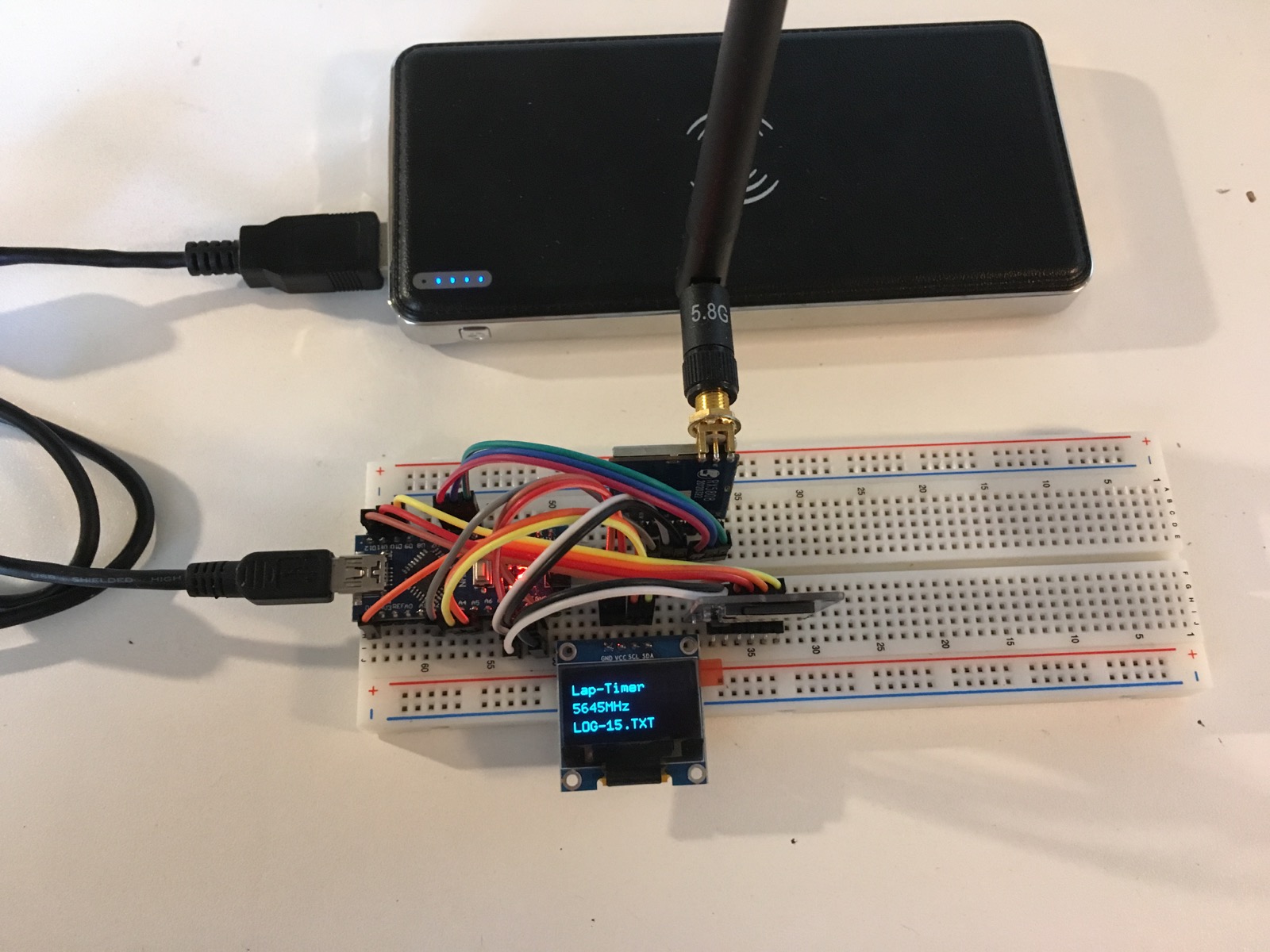
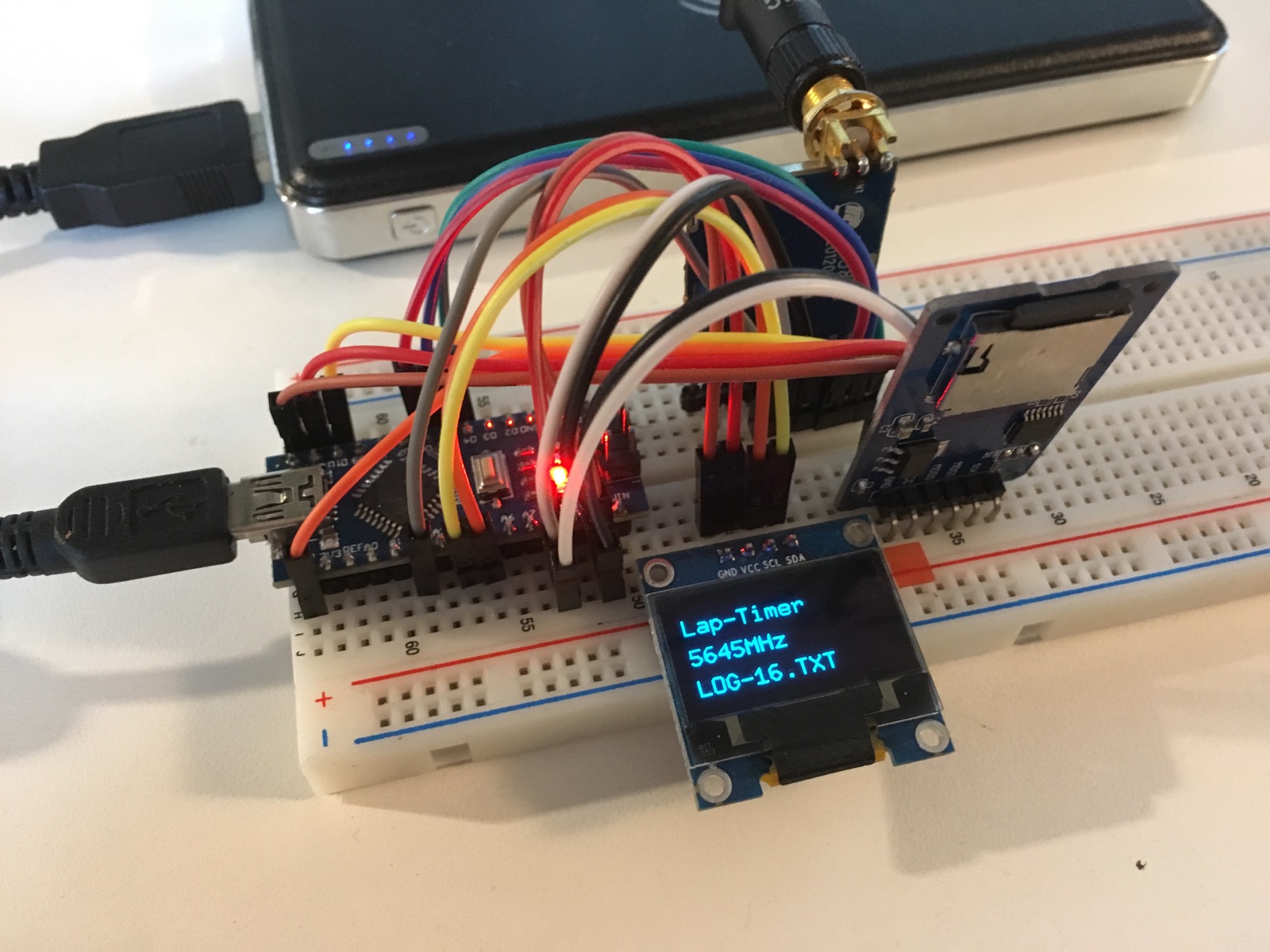
The whole project consists of an Arduino Micro, a 128x64 I2C OLED display, an SD card module and of course the RX5808 module with the SPI mod done.
The pins used on the Arduino can be modified at the beginning of the included Sketch.

The CSV logfile stored on the SD card looks like this:
4058, 159
4212, 161
4367, 163
4521, 161
4674, 160
4826, 160
4977, 160
The fist column contains the milliseconds uptime of the Arduino. The seconds column contains the averaged RSSI value read from the ADC hardware.
The included overlay.py Python-script can be used to render an overlay plot of the logged RSSI data over flight footage.
See the beginning of the script file for the configuration options you have to change!

The SPI and RX5808 interfacing code has been taken and modified from the Chorus-RF-Laptimer by Andrey Voroshkov. This code, as well as all of my code, is released under the MIT license. See the COPYING file in this repository.