{kind=link}
{kind=link}
{kind=link}
{kind=link}
A robot that can move using its on-board controls or using a wireless controller. It is controlled in terms of cartesian coordinates rather than simply rotating each of the joints. Features a gripper as its end effector. Largely 3D printable requires minimal extra hardware.
- On-board control and wireless control option.
- 3 degrees of freedom + gripper.
- Moves in cartesian coordinate space using inverse kinematics
The Robot
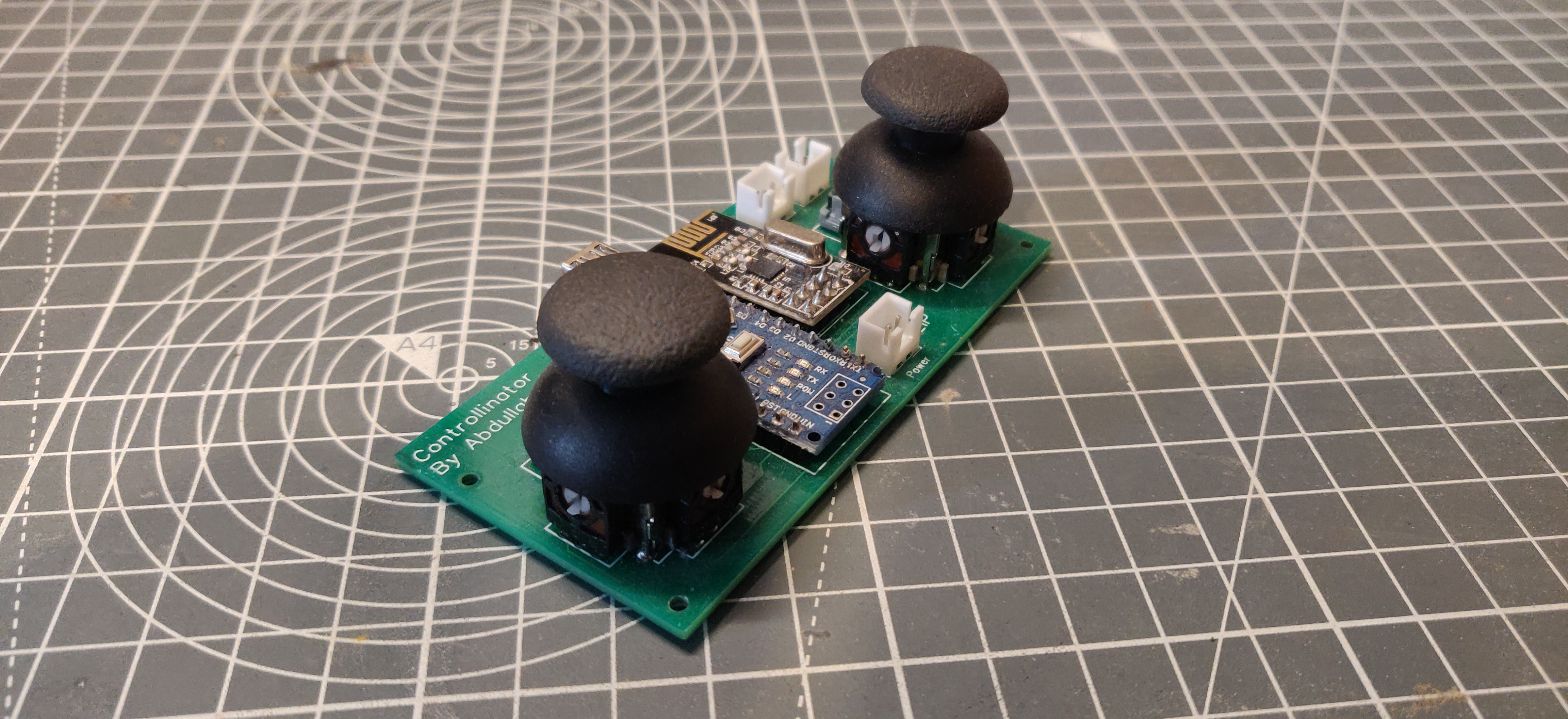
 Wireless Controller
Wireless Controller

 CAD model
CAD model

- driven by an arduino uno board.
- moves and grips using 4 SG90 servos.
- geared 1:2 to increase torque
- limited to 90 degrees movement per joint due to servos and gearing
- Uses nRF24L01 module for wireless control
- Wireless communication - RF24