.png){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
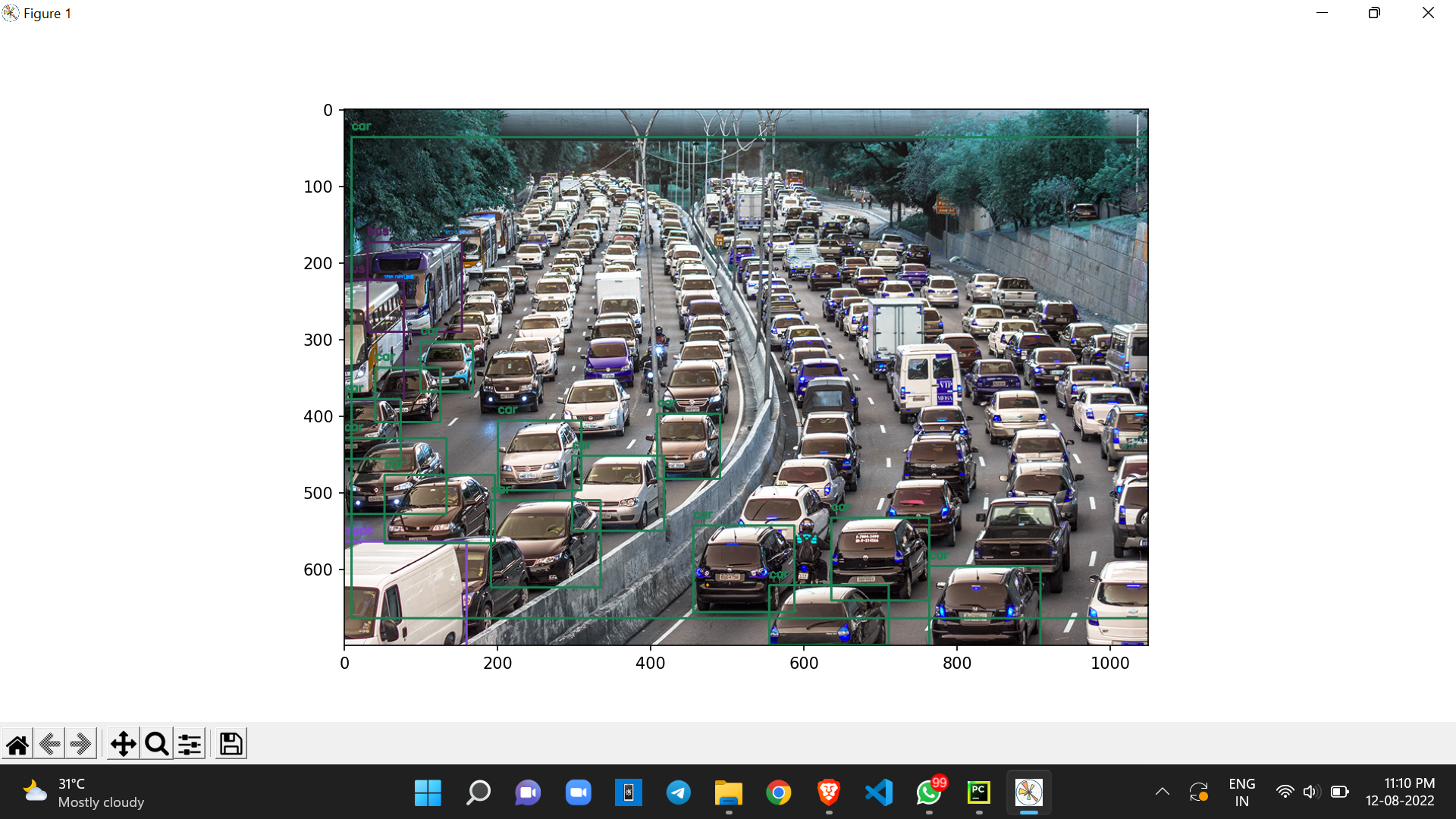
This project intends to develop a vehicle detection program using digital image processing technique. The system is designed to track the vehicle position. This proposed method is using the image processing technique. This system consists of 4 major steps:
- Frame differencing
- Image thresholding
- Finding Contours
- Image dilation
OpenCV-Python: OpenCV is an excellent tool for image processing and computer vision tasks. It is an open-source library that performs functions like face detection, objection tracking, landmark detection, and much more.
NumPy: NumPy is a Python library used for working with arrays. It also has functions for working in the domain of linear algebra, Fourier transform, and matrices.
Matplotlib: Matplotlib is a comprehensive library for creating static, animated, and interactive visualizations in Python. Matplotlib makes easy and hard things possible, interactive figures that can zoom, pan, update, visual style and layout. Time: provides a function for getting local time from the number of seconds.
Gspread: It enables you to easily pull data from Google spreadsheets into Data Frames and push data into spreadsheets from Data Frames. Gspread is a Python API for Google Sheets. Features: Google Sheets API v4. Open a spreadsheet by title, key or URL. Read, write, and format cell ranges.
Cvlib: A simple, high-level, easy-to-use open-source Computer Vision library for Python. Developed with a focus on enabling easy and fast experimentation. Keras(deep learning library) inspired it.
- We import our libraries, cv2, NumPy, time, matplotlib etc.
- We declare some variables like width_min(minimum width), height_min(minimum_height), offset(minimum error), count(initially, we advise it 0, and then it is increased) and set the position of a line.
- We make a list named detec; if anything is detected, it gets appended.
- We make a function find_center of a rectangle made on a vehicle after detecting and returning the centre points of a rectangle in the x and y direction.
- We extract or open video from our system using videocapture in OpenCV.
- Then we use one algorithm in cv2, known as a subtractor, to subtract the background of our object in the video.
- We run a loop to read video (as we know, video is a set of collections of frames) and for performing functions.
- We use cvtColor to convert colour to greyscale to increase accuracy, and then we store that frame in a variable named grey and blur that image by using GaussianBlur to reduce size.
- Then we use one function dilate for broadening an image by using a specific structure element that also determines the shape of the pixel.
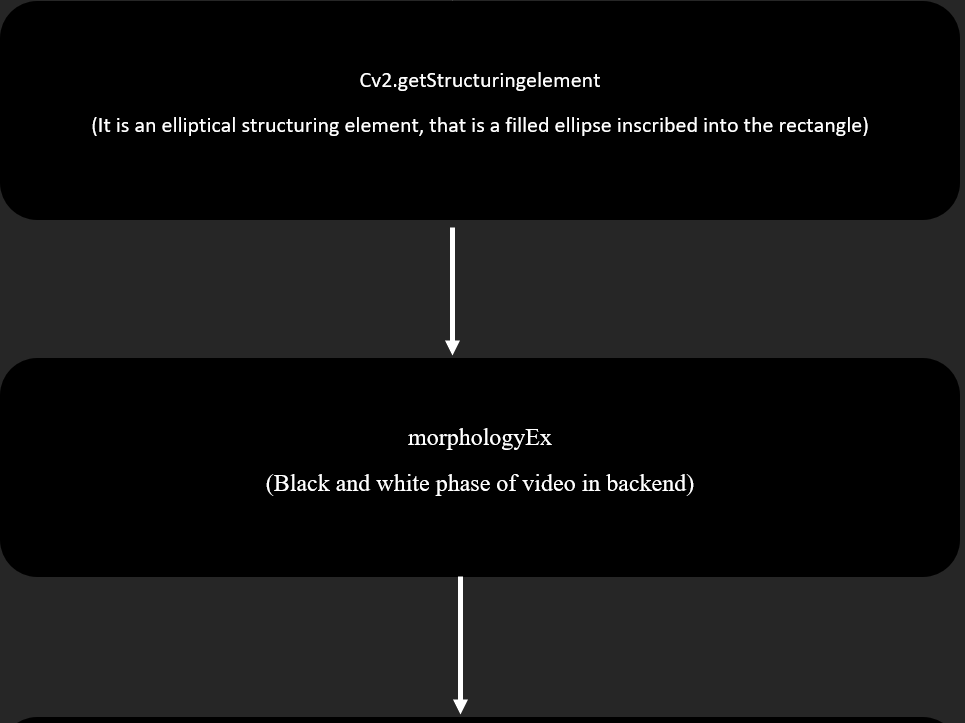
- We use getStructuringElement and MORPH_ELLIPSE to process images based on image shape; each pixel of the image pixel is adjusted based on the value of other pixels in its neighbourhood.
- We use the morphologyEx method that gives black white phase in the backend shown in the video and then by findContours used to count the number of objects.
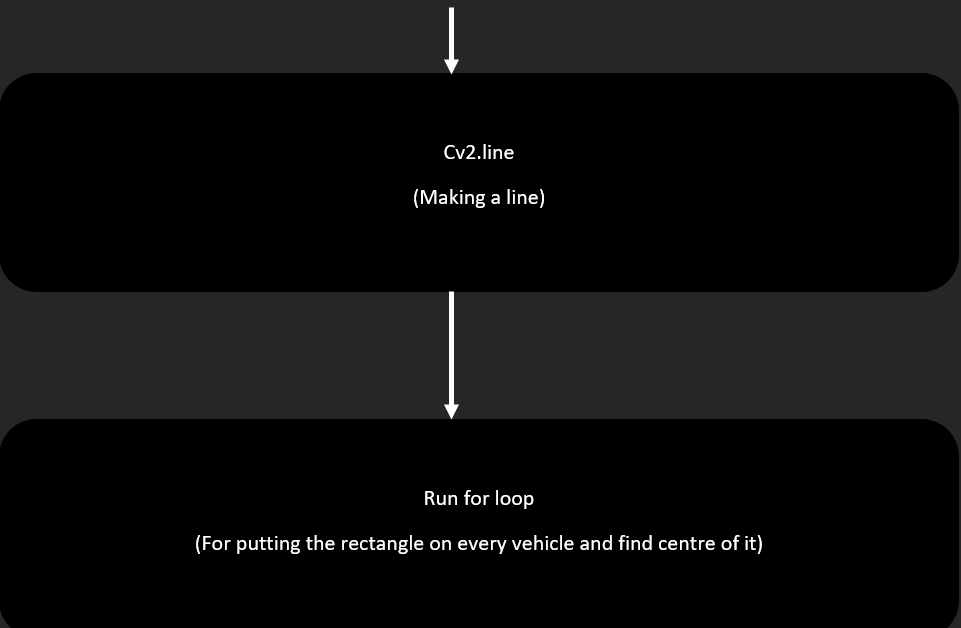
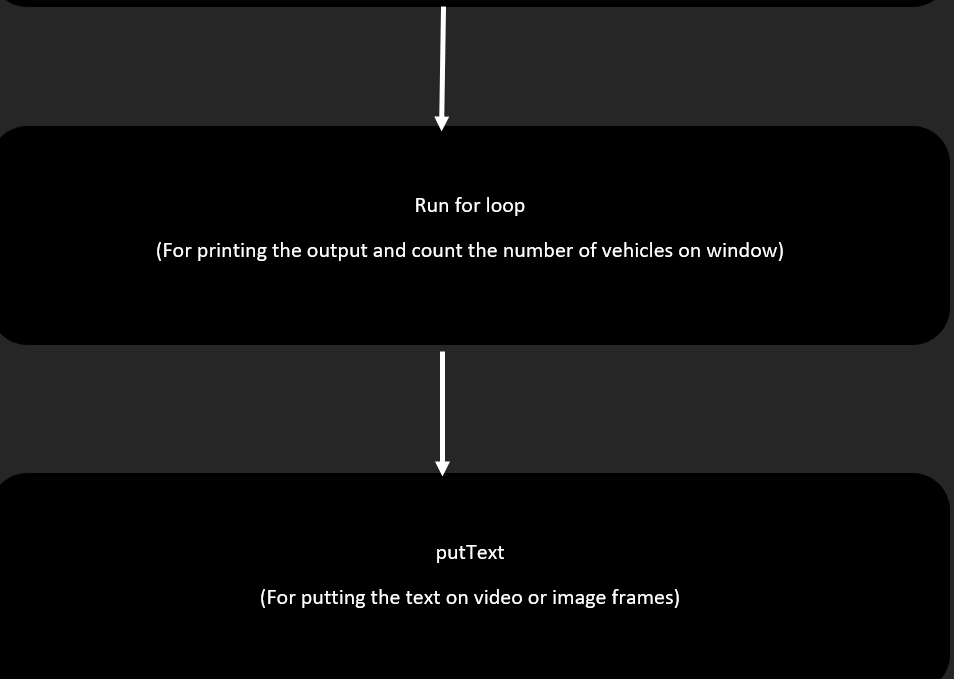
- Then we make a function named enumerate for making rectangles on vehicles after detecting and putting text on the rectangle(VEHICLE COUNT: ) and putting a red circle in the centre of the rectangle.
- We also print the count down on our terminal as Output.
- In the final step, we release all frames, and by using destroyAllWindows, we remove all windows after completing all tasks.